基于汽车导航电子地图的汽车AFS分析
2018-01-07刘建国柳思健
刘建国,柳思健,付 恒
(1.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;2.武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070)
基于汽车导航电子地图的汽车AFS分析
刘建国1,2,柳思健1,2,付 恒1,2
(1.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;2.武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070)
针对现有的自适应前照灯系统(AFS)算法对弯道前、S型路面或过渡曲线上存在的滞后且不精确的问题,提出一种新的P-AFS算法,该算法可以有效利用汽车导航电子地图信息,通过车速和道路曲率来控制前大灯的偏转角度,再结合灯泡的5lx等照度包络线确定AFS启动时刻.采用改进的遗传算法对PID参数进行整定,通过Carsim与Simulink建立整个系统的联合仿真模型,对简单道路模型和实际道路模型进行了仿真验证,并与传统的算法结果进行对比.结果表明:该P-AFS算法可以有效解决传统AFS算法的滞后性,并提高控制的精确度.
自适应前照灯;改进遗传算法;电子地图;AFS启动条件;仿真
自适应前照灯系统(adaptive front lighting sys tem,AFS)是一种能够根据路况环境的变化和汽车的行驶状态对汽车前照灯进行水平和垂直方向进行调整的灯光随动系统[1].AFS系统水平和垂直方向的调整,可以使灯光照射方向与汽车的前进方向保持同步,提供更好的灯光照射范围,使驾驶员能够及时了解弯道路况,从而显著提高汽车的夜间行车安全性.目前的AFS系统[2-3]基本都是依靠车速、转向盘转角或者车轮转角来控制弯道行驶时前大灯的转动,当汽车行驶在圆曲线上时,此种控制算法非常有效.但在汽车位于弯道前、S型路面或过渡曲线上时,此种算法有些滞后且不精确.
笔者提出一种基于汽车导航电子地图的P-AFS(predictive adaptive front lighting system)弯道算法,此种算法具有良好的稳定性、精确度、移植性与适应性,可以将汽车导航电子地图信息应用到前大灯控制系统中,使控制算法更加精确,有效解决传统AFS系统的滞后性问题.
1 停车视距
夜间车辆在弯道上行驶时,前大灯应该能照亮前方处于停车视距以内的路面,停车视距主要包括汽车制动距离和汽车车距(一般为5~10 m)2部分.采用JTG D20—2006《公路路线设计规范》[4]中的停车视距数据进行分析,车速和停车视距之间的关系如表1所示.
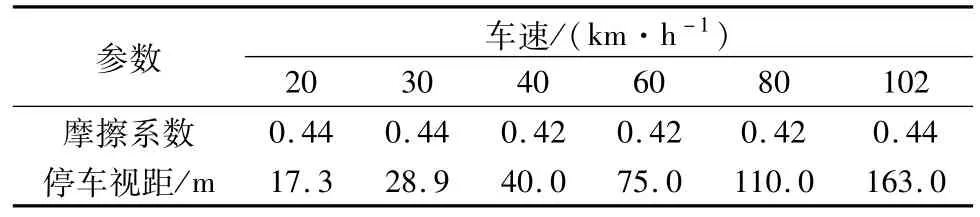
表1 车速和停车视距之间的关系
由表1中数据经过拟合后可得

式中:s为停车视距;v为车速.
文献[5]研究了驾驶员的前视行为后,定义以行驶车速计算未来2~5s内车辆可以行驶到的位置为驾驶员实际的观察范围.这样假设可以减少运算量,车辆行驶具有较高的安全性.停车视距与5s内汽车行驶距离之间的关系如图1所示.
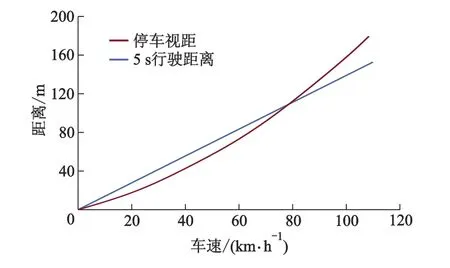
图1 停车视距与汽车5s内行驶距离的比较
从图1可以看出汽车停车视距与5s汽车行驶的距离相当接近.可以认为,汽车前大灯能够照亮5s后汽车行驶到的位置,就可以保证安全制动.所以,汽车安全停车视距为

2 P-AFS算法
在汽车导航领域,最重要的是交通矢量图,可以认为矢量地图数据是一种向量,该向量用平面直角坐标系的坐标(x,y)来表示,基于这个特征,矢量库定义了地图的位置、形状和结构信息.与道路信息相关的定义如下:节点是道路交叉点、道路形状改变点或者道路属性改变点、道路尽头以及其他可以定义道路属性与拓扑关系的点;形状点是一些除了节点之外,为了比较精密描述道路几何形状的点.因为道路节点与形状点在地图中的数据组织形式为向量,因此可以使用这些数据进行导航,也可以应用于文中的算法.当汽车获取导航信号,并将信号与电子地图进行匹配后,汽车在电子地图中的位置便已经获得.导航信号的获取、地图信息的匹配,文中不再涉及,当地图信息匹配完成后再运行文中的算法[6].

图2 等效曲率示意图

3)由1),2)可得l≥j;若l=j,A,B点的坐标可能相等,此种情况可能为道路曲率非常小,接近直线,因此相应的形状点非常稀疏,也可能是车速非常小;若A,B点坐标相等,均为集中点ak=(xk,yk),k=0,1,…,此时只有2个点,无法确定一个圆,则直接取A点坐标为ak=(xk,yk),取B点坐标为ak+1=(xk+1,yk+1).
4)根据当前汽车运动参数和道路坐标点,确定汽车未来行驶方向是左转向还是右转向,算法结束.
算法中所取的点,并非极其精确地按照汽车当前速度计算未来3,5s将要抵达的点,而是与这2个点非常接近的2个点,实际上,电子地图中的道路轨迹原本就是离散点给出的折线,根本无法取得未来行驶道路的精确点.
在获取参数R之后,可得出前大灯在道路上不同位置的偏转角:
AFS算法公式[7]为

3 P-AFS启动条件
依据CJJ 45—2015《城市道路照明设计标准》[8]对城市路面照明的规定,照度5lx以内是驾驶员的可见范围.因此,驾驶员的有效视野应在5lx等照度曲线包络范围内.从Lucidshape自带的H7灯泡的等照度包络线中得到5lx等照度曲线,如图3所示.

图3 未来5s汽车行驶轨迹与5lx等照度包络线关系
图3中,O点为车辆当下重心位置,汽车前进方向为x轴正方向,驾驶员左手侧为y轴正方向,A点为汽车未来5s后所抵达的位置(假设车辆速度大小不变),φ为转弯制动角,R为转弯半径,包络线为汽车前大灯5lx等照度曲线,OA为汽车未来的行驶轨迹,P-AFS要确保汽车未来5s行驶过的路线在等照度包络线的范围内.
以汽车左转为例来说明,当A点(图3中A点)在等照度曲线包络线内时,说明当前车灯能够照亮汽车未来5s后所到达的位置,车灯不需发生偏转;当A点(图3中A′点)在等照度曲线包络线外时,说明当前车灯不能够照亮汽车未来5s后所到达的位置,故前大灯需要进行水平方向转动,照亮汽车未来5s后所到达的位置;所以当A点在5lx等照度曲线包络线上时,即是汽车AFS的启动时刻的临界值.
从5lx等照度曲线上找出20个点,并进行曲线拟合,其决定系数为0.970 1,可见拟合精度较高,所得到的拟合方程为

式中:a1=-3.725×10-10;a2=1.771×10-7;a3=-3.262×10-5;a4=3.000×10-3;a5=-0.132;a6=2.767;b=-10.148.
将A点坐标代入式(5),即可得到不同车速和不同转向盘转角条件下的汽车P-AFS启动条件,如图4所示.
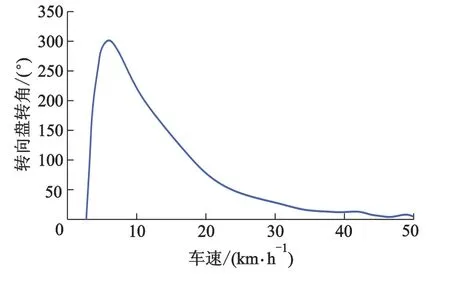
图4 汽车AFS启动条件
4 控制算法分析及步进电动机建模
PID算法是工业上最常用的控制算法,能满足大多数使用要求[9].遗传算法主要采用生成基因、检测适应度来进行运算,其主要步骤:① 生成编码;②产生一组初始种群;③对染色体进行所选算法的计算,直至满足预设条件;④算法结束,输出结果.
用改进的遗传算法进行PID参数整定[10],分别用10位二进制数编码串起来表示3个需要决策的变量KP,KI,KD,则基因的长度为30位.初始种群大小为m=50,迭代次数为300次.选择算法为适应度比例法,变异率、交叉率计算公式分别为


目标函数为
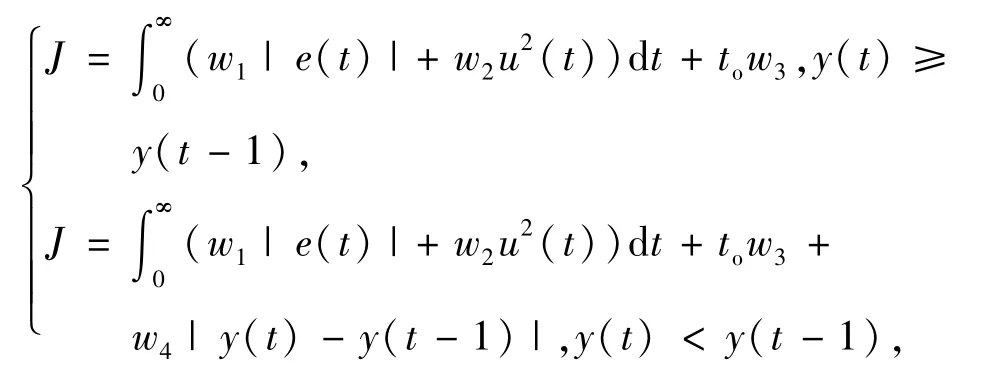
式中:e(t)为系统误差;u(t)为控制器输出量;to为上升时间;w1,w2,w3,w4为加权系数;y(t)为被控对象的输出值.

对汽车前大灯偏转角度的控制,实际是对步进电动机的控制.涉及的P-AFS大灯中,为了实现大灯的水平偏转,左右大灯皆需要一个步进电动机.此处选择某车型的二相混合式步进电动机,其基本参数:额定电压为12 V,额定电流i=0.8 A,电感L=1.2× 10-5H,步距角为7.5°,电动机齿数Nr=48齿,黏滞阻尼系数为B=0.005,工作温度为-30~80℃.
设输入期望转角为θ1,步进电动机在接收电信号后实际转角为θ2,则步进电动机的运动方程为

对式(8)进行拉氏变换,化简代入步进电动机参数后得到传递函数为

5 建模仿真分析
用Carsim和Simulink搭建联合仿真平台,对整个模型进行验证.Carsim中设置仿真条件,选择车型为两厢B级车,汽车总质量为1 395 kg,质心至前轴距离为1.04 m,质心至后轴距离为1.42 m,轮胎侧偏刚度为-56 000 N·rad-1,前驱动,4个轮胎皆选择185/65R15,前后皆为独立悬架,选择驾驶控制为速度控制,设置均匀目标车速为36 km·h-1,无制动,无偏移,预瞄准时间为1.5s.并设置Carsim解算步长为0.01 s,输出步长为0.02 s.
先以一种简单的道路模型来进行仿真,如图5所示.
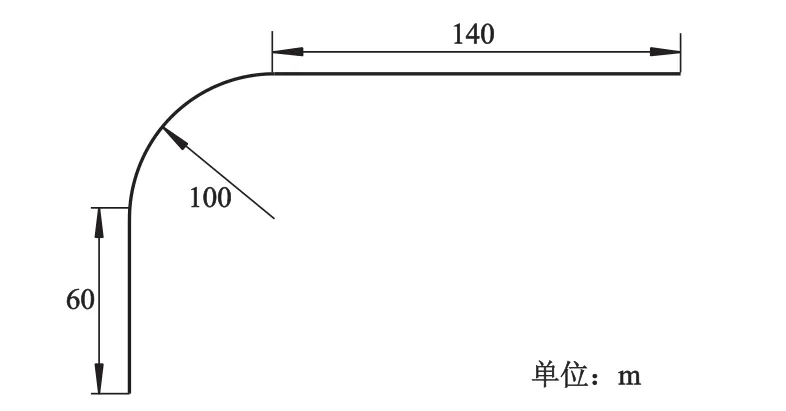
图5 简单道路模型
道路设置:直线60 m,然后与半径为100 m的圆弧相切,圆弧中心角为90°,圆弧线后端再连接约140 m的直线,总的道路长度约为350 m.主要验证的是汽车在进入、驶出圆弧线、以及汽车在圆弧线上行驶时,2种模型的前大灯偏转模型所得的角度.此处的简单道路模型设置是按照国家标准[4,11]设置,可以体现实际行驶道路.用80个坐标点来形成该路段,则平均每隔4.45 m就有一个坐标点,所描述的道路比较精确.
Carsim和Simulink联合仿真时建立的仿真模型如图6所示,设置仿真时间为28 s,仿真结果如图7所示.
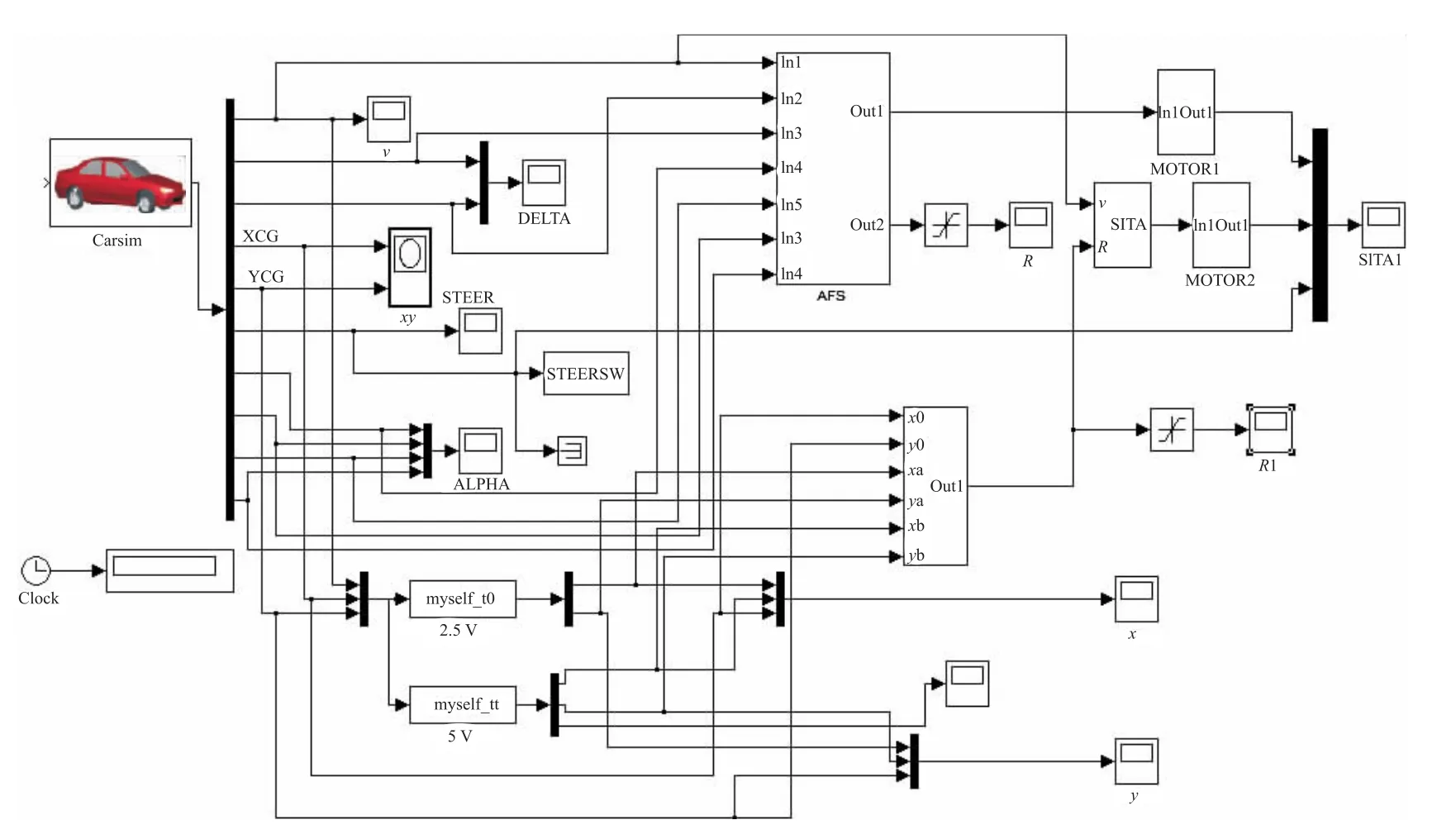
图6 Carsim与Simulink的联合仿真模型

图7 简单道路模型仿真结果
从图7可以看出:约2.2 s时,汽车行驶在直线上,P-AFS控制的前大灯开始偏转,到约6.0 s时,也就是汽车入弯时,该模型的汽车大灯偏转角已经到达最大值;而AFS模型的前大灯开始偏转的时刻约5.5s时,此时汽车即将入弯,驾驶员已经对转向盘已经有一定的输入,待AFS模型的前大灯偏转角到达最大时,约7.0 s,汽车已经在弯道内行驶了约10 m.在18.0 s左右,也就是汽车尚未出弯的时候,汽车前大灯已经开始减小偏转角度,约22.0 s时,前大灯偏转角已经基本为0°,此时汽车刚刚行驶到直线路段.而AFS算法的前大灯偏转角度自汽车出弯左进时开始减小,一直到约23.0 s时,才基本变为0°,此时,汽车已经在直线路段上行驶了约13 m.
从图7可知,提出的P-AFS算法完全满足预测型要求,解决了滞后问题,并且很好地控制了AFS系统的的启动时刻,避免了频繁启动,比传统算法更加优越.此外,P-AFS算法所得的大灯转角最大值约为15.0°,而AFS算法所得车灯转角最大值约为17.5°,2种算法的公式形式一样,存在差异的原因就是AFS算法是以前轮转角为输入,道路实际弯道半径为100 m,当汽车行驶在弯道上时,AFS算法的约为85 m,P-AFS算法所得的约为97 m.AFS算法所得结果误差较大的原因在于轮胎侧偏角对前轮转角的巨大修正.在仿真过程中发现,当汽车行驶在弯道上时,其前轮转角约为1.7°,同时左前轮侧偏角约为-0.2°,这个轮胎侧偏角对转弯半径的修正量非常大.
为了更进一步验证提出算法的效果,再设置一种更贴近实际情况的仿真工况.从电子地图底层数据导出一部分数据,得到国道217上一段路线的数据.这段路线非常具有代表性,具有圆曲线、过渡曲线、直线等各种线型,且还有一个S形弯道.路线长约1.9 km,共有120个坐标点.将这段道路的经纬度经过坐标变换,导入到Carsim中,得到一段路线如图8所示,其余仿真条件设置不变,仿真时间设置为60 s,仿真结果如图9所示.
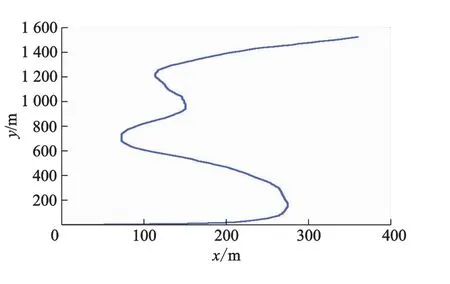
图8 Carsim中还原的仿真道路

图9 电子地图导出数据仿真结果
从图9可以看出:P-AFS算法所得的大灯转角总是提前于AFS算法所得的大灯转角,可以有效提高驾驶员夜间行驶的视野范围,提高安全性.P-AFS所得的曲线并不平滑,会有尖峰,有时与传统AFS算法所得的结果有较大的不同,出现这些现象的原因在于道路曲线上坐标点并不很密集,因此数据阶跃性变化,而且由于电子地图底层数据与实际道路情况有一定差异,这些差异在道路数据采集过程中就无法避免,此外,汽车行驶的实际轨迹与设置的道路依然有一定差异,在某些时候,实际轨迹与仿真道路曲线有数米的偏差.
仿真结果表明:本控制算法控制效果较好,未产生超调现象,且算法结构简单,容易操作,可靠性高,同时扩大了搜索范围,不但避免了陷入局部搜索,还加快了搜索速度,提高了算法的性能.
6 结 论
提出一种直接用汽车导航电子地图信息的P-AFS算法,给出等效半径的概念和求法.同时,对AFS启动条件进行了深入分析,使AFS启动条件设定更加合理.建立仿真模型,验证了控制算法的有效性,解决了传统AFS算法的迟滞性,提高了控制精确度.同时,验证了传统AFS算法,以车速和前轮转角作为控制器输入并不精确.
高精度的电子地图和汽车P-AFS的匹配算法,是保证此算法有效性和准确性的前提,在今后的研究中,将继续深入此方面研究.
(References)
[1] 崔惠中,关志伟.智能前照灯系统(AFS)研究现状综述[J].天津工程师范学院学报,2008,18(1):47-50.CUIH Z,GUAN Z W.Current research of advanced front light system[J].Journal of Tianjin University of Technology and Education,2008,18(1):47-50.(in Chinese)
[2] 李礼夫,邓前.汽车自适应前照灯转弯模式的数学模型研究[J].汽车技术,2010(10):43-46.LIL F,DENG Q.Research on themathematicalmodel of bendingmode of vehicle adaptive front lighting system[J].Automotive Technology,2010(10):43-46.(in Chinese)
[3] 左萃.汽车智能前大灯系统(AFS)控制策略及仿真研究[D].长沙:长沙理工大学,2012.
[4] 中交第一公路勘察设计研究院.公路路线设计规范:JTG D20—2006[S].北京:人民交通出版社,2006.
[5] SALVUCCID D,LIU A.The time course of a lane change:driver control and eye movement behavior[J].Transportation Research Part F,2002,5:123-133.
[6] 杨森森.基于GPS/INS/激光雷达的无人车组合导航[D].上海:上海交通大学,2013.
[7] 陈建林.基于驾驶模拟器的汽车AFS系统控制策略研究[D].武汉:武汉理工大学,2009.
[8] 中华人民共和国住房和城乡建设部.城市道路照明设计标准:CJJ 45—2015[S].北京:中国建筑工业出版社,2015.
[9] 刘金馄.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[10] 何芝强.PID控制器参数整定方法及其应用研究[D].杭州:浙江大学,2005.
[11] 交通部公路司,中国工程建设标准化协会公路工程委员会.公路工程技术标准:JTG B01—2003[S].北京:人民交通出版社,2004.
Analysis of AFS based on car navigation electronic map
LIU Jianguo1,2,LIU Sijian1,2,FU Heng1,2
(1.Hubei Key Laboratory of Advanced Technology for Automotive Components,Wuhan University of Technology,Wuhan,Hubei430070,China;2.HubeiCollaborative Innovation Center for Automotive Components Technology,Wuhan University of Technology,Wuhan,Hubei 430070,China)
To solve the problems of lagging and imprecise in AFS system algorithm during facing the curve,the Stype road or transition curve,a new PAFS algorithm was proposed.The car navigation electronic map information was effectively used to control the deflection angle of headlights by vehicle speed and road curvature.Combining the bulb 5lx isolux enveloping line,the starting time of AFSwas determined.Adopting the improved genetic algorithm,the PID parameters were set,and a joint simulation model of the whole system was established by Carsim and Simulink software.The simple road model and the actual road modelwere simulated and compared with the traditional algorithm results.The results show that the PAFS algorithm can effectively solve the lagging question in traditional AFS algorithm with improved control accuracy.
adaptive front lighting;improved genetic algorithm;electronicmap;AFSstarting condition;simulation
10.3969/j.issn.1671-7775.2018.01.001
U463.65
A
1671-7775(2018)01-0001-06
2016-12-27
湖北省科技支撑计划项目(2014BHE019)
刘建国(1970—),男,湖北宜昌人,副教授(455798245@qq.com),主要从事汽车电子的研究.
柳思健(1992—),男,湖北孝感人,硕士研究生(244284465@qq.com),主要从事汽车电子的研究.
刘建国,柳思健,付 恒.基于汽车导航电子地图的汽车AFS分析[J].江苏大学学报(自然科学版),2018,39(1):1-6.
(责任编辑 贾国方)
