三七收获机组合式挖掘铲设计与试验
2018-01-07,,,
,,,
(1.昆明理工大学现代农业工程学院,云南昆明650500;2.昆明市农业机械化技术学校,云南昆明650034)
三七收获机组合式挖掘铲设计与试验
张 丹1,张兆国1,曹永辉2,王法安1
(1.昆明理工大学现代农业工程学院,云南昆明650500;2.昆明市农业机械化技术学校,云南昆明650034)
为解决三七机械化收获易产生的挖掘铲前壅土问题,在不降低收获率的前提下设计了一种由三角平面铲和土壤破碎铲组成的新型组合式挖掘铲,并对该挖掘铲进行了研究.利用Design Ex pert8.0.6软件进行了回归分析与响应曲面分析,确定了该挖掘铲的结构和最优工作参数:铲面倾角20°,入土隙角12°,作业速度0.75 m·s-1.田间试验表明收获率达到98.38%,验证了回归模型的正确性,满足作业要求.通过对组合式挖掘铲与普通挖掘铲的挖掘收获效果进行对比试验,结果表明组合式挖掘铲在收获率与铲前壅土方面有着更好的性能,更加适合三七收获.
收获机;三七;土壤破碎;组合式挖掘铲;试验
三七属五加科多年生人参类植物,是我国特有名贵根茎类中药材[1-2].目前,三七大部分采挖仍使用传统的人工采挖方式,采挖效率低下,劳动强度很大[3].因此,开展三七机械化收获和收获技术的研究是迫切需要的.挖掘铲作为三七收获机的关键部件,其形态结构、几何参数将直接影响着机械性能以及收获效果.近年来,国内学者开展了相关研究[4-7],取得了较好效果.魏宏安等[8]为4UFD 1400马铃薯联合收获机设计了一种纵向剖面呈“~”形,分体式三阶平面组合结构挖掘铲,提高了入土和碎土能力.郑德聪等[9]考虑半夏种植密度过大,不宜进行行对行收获,采用整体式挖掘铲,提高收获率.杨然兵等[10]为解决平作花生联合收获易产生挖掘铲前壅土的问题,研制了一种动力圆盘挖掘装置,田间作业试验效果较好.然而在三七实际收获过程中,现有的挖掘铲有着诸多影响作业效率和质量的问题.若采用平面铲进行挖掘,由于三七的种植幅宽和种植密度较大,并且土壤表面上覆盖有大量松针叶[11],会导致机器挖掘阻力大,壅土现象严重,挖掘效率低.三七多为丘陵山区小块面积地带种植[11],三七收获机应尽量简单可靠且便于运输,如采用其他挖掘装置去代替挖掘铲,会增加整机动力消耗和整机的复杂性,以及降低装置的可靠性.
本研究针对以上实际问题设计一种新型组合式挖掘铲,并拟利用响应曲面法以收获率为响应值对组合式挖掘铲关键因素进行优化,采用模型验证与对比试验检验组合式挖掘铲在满足三七收获率的前提下,是否降低壅土严重的问题.旨在为块茎类作物挖掘铲的设计提供参考.
1 总体结构方案设计
1.1 三七种植与收获模式
三七主要在土质疏松、排灌方便、保湿且要8年内未种过三七的土壤中种植,并用大量的松针叶覆盖裸露墒面.三七种植采用垄作,如图1所示.行距95~105 mm,株距140~150 mm,沟宽300~400 mm,垄顶宽1 500~1 600mm,垄底宽1 600~1 700mm,垄高100~160 mm,普通三七的生长深度150 mm,最大生长深度200 mm.挖掘铲的收获宽度大约1 700 mm,一次作业可收获一垄十行作物.
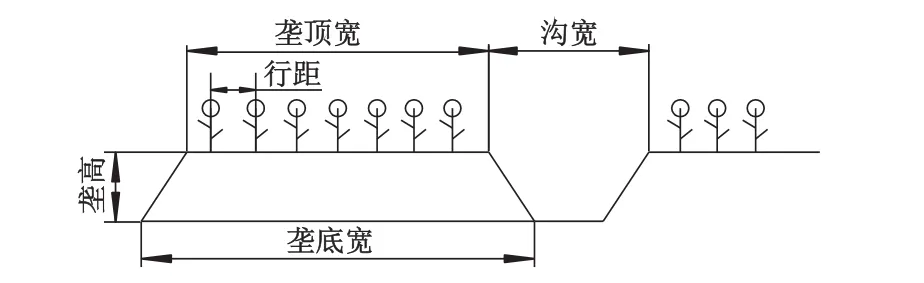
图1 三七种植模式示意图
1.2 总体结构与工作原理
组合式挖掘铲结构如图2所示,主要由三角平面铲、土壤破碎铲、铲架组成,三角平面铲与土壤破碎铲交错排列,土壤破碎铲尖位置比三角平面铲铲尖靠前约60 mm.整个装置通过螺栓与机架刚性连接.工作时,拖拉机牵引三七收获机前进,组合式挖掘铲中的土壤破碎铲先行破土,疏松土壤,同时土壤破碎铲将其周围三七和部分土壤推动至两个土壤破碎铲间形成的一个通道内(文中约定为推七能力),即三角平面铲的挖掘范围,然后三角平面铲完成挖掘收获.
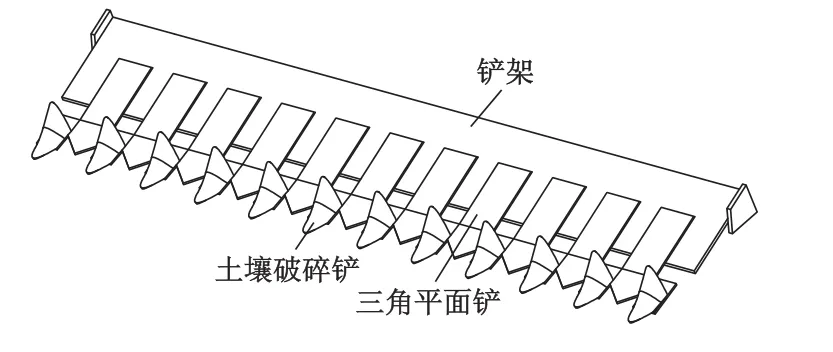
图2 组合挖掘铲结构简图
2 组合式挖掘铲设计与参数确定
2.1 三角平面铲的设计
三角平面铲作为组合挖掘铲的主要工作部件,必须保证能顺利将三七铲起,且要减小入土阻力.为此将对铲刃张角γ0、铲面倾角α、铲体宽度b与铲体长度L等主要参数进行设计,如图3所示.

图3 三角平面铲的特性图
2.1.1 铲刃张角参数的确定
三角平面铲张角大小直接影响到挖掘阻力的大小.当铲面张角过大时,三角平面铲工作时三七的茎叶、杂草等杂物不易被切断,形成很大的阻力,因此需要控制铲刃张角,使三七茎叶、杂草等杂物能够沿铲刃边缘顺利滑移,起到减小挖掘阻力的目的.铲刃受力分析如图3a所示.若铲刃边缘所受的茎叶、杂草以及土壤的总阻力为F,铲刃前进作用力为P0,满足F<P1时,铲刃不会产生壅土和杂草缠刃现象.则易得

式中 φmax为茎叶、杂草和土壤对钢的最大摩擦角.土壤对钢的摩擦系数为0.577~0.721,茎叶对钢的摩擦系数为0.95~0.98,故只要满足茎叶对钢的摩檫系数即可,计算得γ0<120°可满足要求,本设计采用γ0=90°.
2.1.2 铲面倾角参数
铲面倾角的选择标准是将三七与泥土的混合物沿铲面上升到一定高度时,其掘起物不会落下,并且使挖掘物能顺利运送到后面升运装置上.铲面上掘起物受力分析如图3c所示.计算式如下:

式中:P为掘起物移动所需力;α为铲面倾角;G为掘起物的重力;F为土壤与铲的摩擦力;FN为挖掘铲对掘起物的支反力;μ为土壤对挖掘铲的摩擦系数.
三角平面铲在A A的直线处折弯,即为二阶面,二阶面形成的铲面曲折变化,可使通过的三七与土壤的混合物有劈裂、剪切、折断的效果[12-13].二阶面的两个铲面倾角α1和α2都满足式(5),α1较小有利于滑切与杂物自清,减小起土阻力.α2较大有利于碎土要求以及掘起的高度.一阶铲面倾角α1略小于二阶铲面倾角α2[14],并且还要保证两个倾角之间的差值不能过大或者过小,差值过大铲面碎土能力有所提高但会导致阻力迅速增大,差值过小阻力相对较小但碎土能力不够.故10°≤α1≤20°,本设计中α2=α1+5°.
2.1.3 铲面总长参数的确定
平面铲长度不能过大也不能过小,过大会引起掘起物的堆积、翻转或回流,过小则会使土块还没来得及破碎就被运送到升运装置上且不易被振动碎裂,也使得升运装置上的动力消耗急剧增加.二阶平面铲长度如图3b所示,有如下公式:
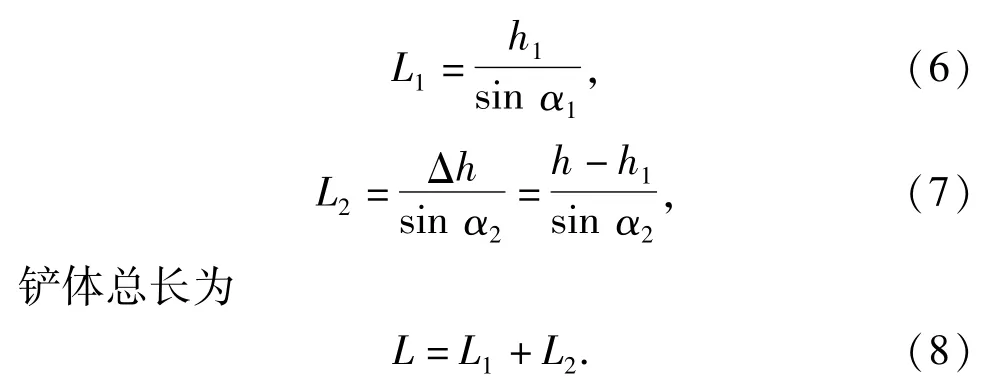
由农艺可知,h=140~200 mm时才能将三七完全挖出,且不损坏三七.一阶铲面高度h1占总高度h的1/5~1/4时,可以使掘起物恰好落到升运链上且确保其后能被顺利输送,避免土壤堆积,同时也使整机重心更加靠前.在满足上式的条件下并参考其他根茎类的挖掘铲,取总长L约400 mm.
2.1.4 铲体宽度参数的确定
二阶平面铲为主要的工作部件,本设计中采用二阶平面铲正对三七块根的采挖方式[15],平面铲的行进方向与三七块根的生长方向平行.宽度要能将一株最大尺寸的三七完整挖出,三七块根近似为一个圆柱体,其最大长度和直径分别为82.24 mm和32.95 mm.实际挖掘宽度略大于理论宽度,因此取铲宽b为90 mm.
2.2 土壤破碎铲的设计
土壤破碎铲有着降低挖掘阻力,减小壅土程度并辅助三角平面铲挖掘三七的功能.结构如图4所示.土壤破碎铲为三棱楔[16],其主要参数有翼张角γ1,入土角β,入土隙角β0,铲胸升角β1,翻土角β2和铲翼宽c.
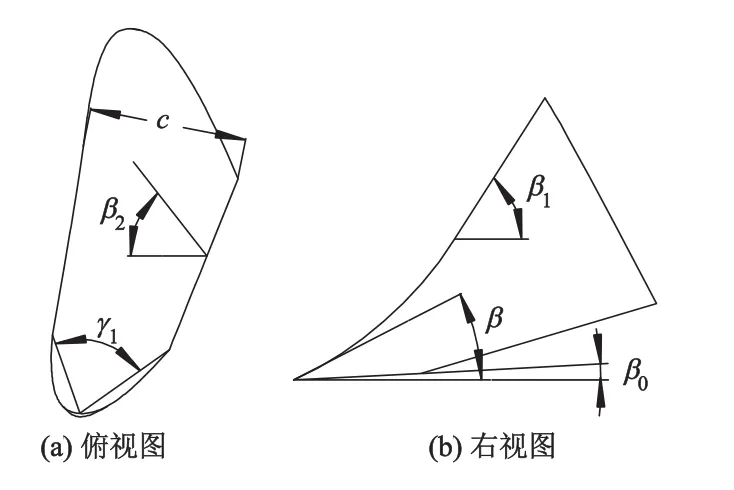
图4 土壤破碎铲的结构简图
2.2.1 翼宽与翼张角参数的确定
由于三角平面铲采用正对三七块根的采挖方式,根据三七的种植株距,且土壤破碎铲位于二阶平面铲之间,易得铲翼宽度不大于二阶平面铲间的间隙,即

在满足上式的前提下且考虑挖掘铲整体的紧凑取铲翼宽c为58 mm.选择翼张角的值主要根据是使杂草根茎沿破碎铲刃口滑动,避免缠绕破碎铲.其值可参考二阶平面铲的张角的设计,但由于铲翼宽的限制,故选定翼张角γ1为48°.
2.2.2 入土隙角参数
入土隙角β0为土壤破碎铲底面与地面之间的夹角,有利于土壤破碎铲入土.β0过小导致推七能力降低,过大导致挖掘阻力增加并加剧壅土量.入土隙角在5°~15°范围内可满足工作要求.
2.2.3 最小入土角与铲胸升角参数
入土角为破碎铲工作面与地面之间的夹角.文中入土角的设计与圆弧刃口型开沟器刃口相似,为圆弧设计,如图5所示,从O点开始沿着圆弧向上的点的切线斜率会不断增加,即入土角角度不断变大,当到达A点时入土角角度不发生改变即变为铲胸升角.初始起土角较小便于减小起土阻力,而较大的铲胸升角便于侧翻土.为方便确定入土角与铲胸升角参数的最小值取入土隙角β0为5°,故其关系与范围为25°≤β≤β1≤65°,结构如图5所示.
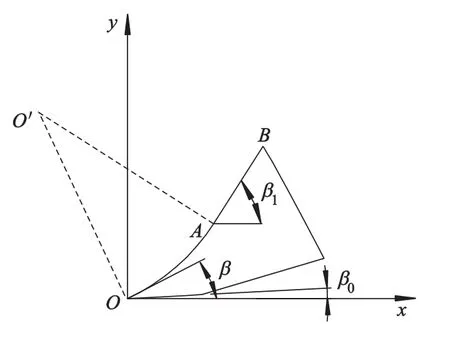
图5 入土角与铲胸升角示意图
入土隙角β0为5°时,入土角为最小值25°.假设弧线O点为坐标原点,A点的纵坐标为入土角变化为铲胸升角的临界高度值,其大小约为三七主根系在土壤中所占高度,取值50 mm,A点横坐标取值不能使β1大于65°,拟取值60 mm.故弧线上两点坐标为O(0,0),A(60,50).因此,假设OA圆弧线的方程为

式中:a,d为圆心O′的横纵坐标;R为圆半径,mm.将O,A两点坐标带入上式,初始入土角β取为25°,故

在OA圆弧又有以下性质:

由上式易得β1=55°,满足要求,最小入土角β与最小铲胸升角β1分别为25°和55°.
2.2.4 翻土角参数的确定
3 田间性能试验与分析
试验于2016年1月12号在云南省文山州丘北县白色姑村文山七丹药业股份有限公司GAP三七种植基地使用4QD 170型三七收获机进行.三七收获期间的田间状况调查如下:三七平均垄宽1 690 mm,平均垄高150 mm,三七的直径为5~32 mm,三七和土壤混合层平均厚度为40~50 mm,土壤含水率为15.3%,容重为1.32 g·cm-3,土壤松散,黏性较小,土粒黏结力适中.为保证三七能完整挖出不被损伤,组合式挖掘铲挖掘深度固定为200 mm,试验装置及试验现场如图6所示.
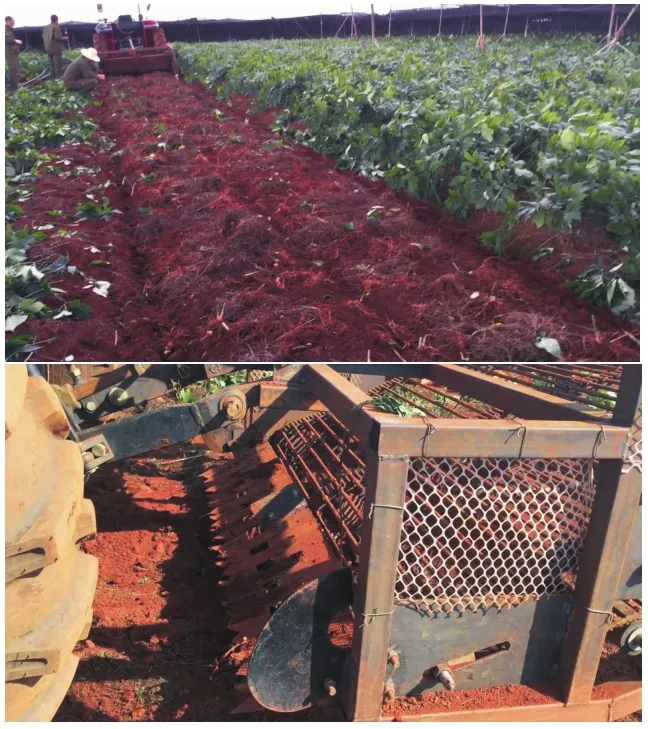
图6 装置试验现场图
3.1 试验设计
为探讨组合式挖掘铲关键参数对三七挖掘的影响,进行二次正交旋转组合试验.试验主要参数:三角平面铲铲面倾角、土壤破碎铲入土隙角以及组合式挖掘铲作业速度.试验参数调整方案:①三角平面铲铲面倾角以二阶面的第二个铲面中的倾角α2为基准测试参数,组合式挖掘铲与机器机架上不同位置的螺栓孔固定进行铲面倾角的调节.②三角平面铲与土壤破碎铲的相对位置制作多个组合式挖掘铲以调整土壤破碎铲入土隙角.③通过拖拉机的行进速度调整组合式挖掘铲的作业速度.各因素进行水平编码如表1所示.
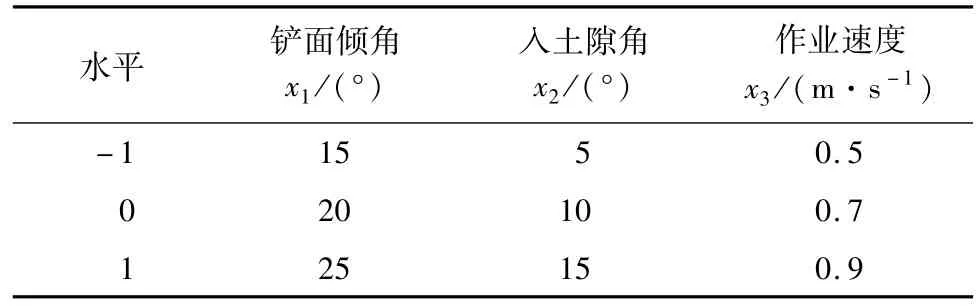
表1 因素水平编码
3.2 挖掘率模型的建立与检验
三七挖掘率是衡量组合挖掘铲性能最关键的参数,故本次试验的响应值为挖掘率Y(在满足挖掘率的前提下,对壅土程度作对比分析).试验方案及试验结果如表2所示.
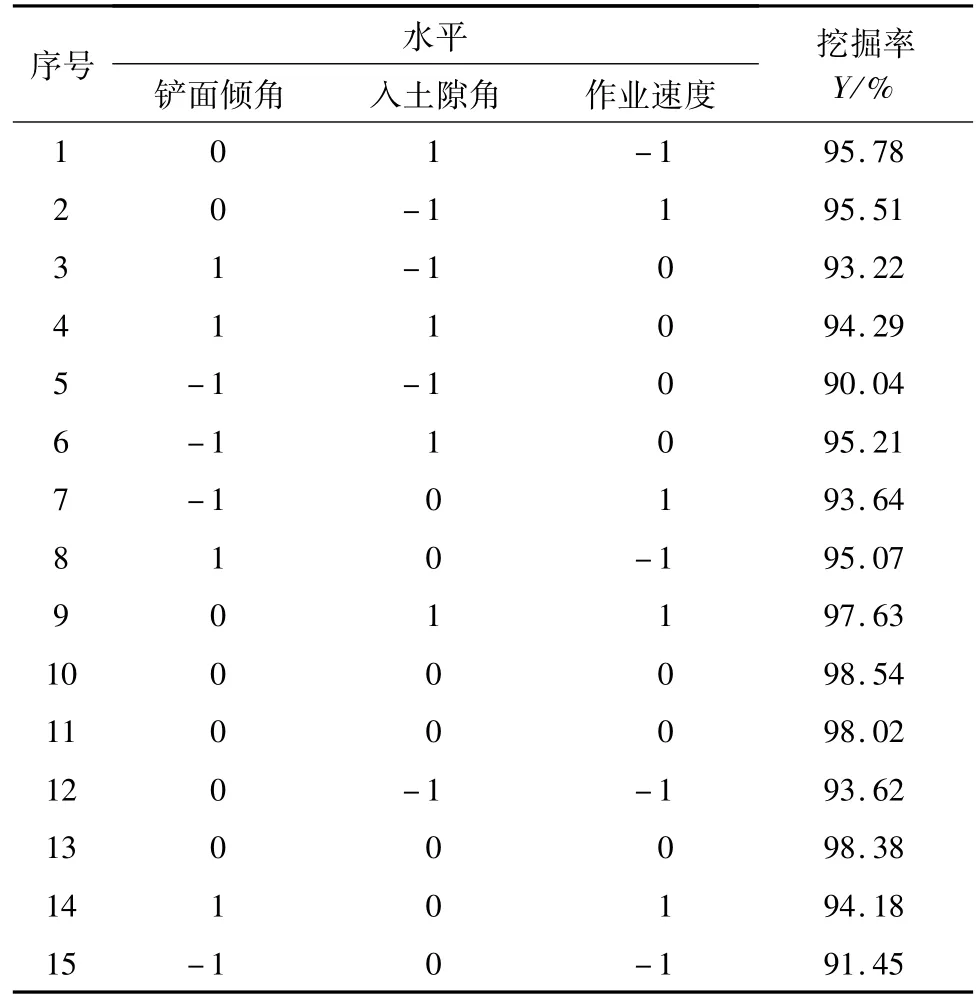
表2 试验方案和结果
试验后用Design Expert8.0.6软件对数据进行处理,建立了回归方程与优化方案,得到铲面倾角、入土隙角、作业速度、对挖掘率Y的二次多元的回归方程为

对上述回归模型中各项回归系数进行F检查和方差分析,挖掘率方差分析的结果如表3所示.
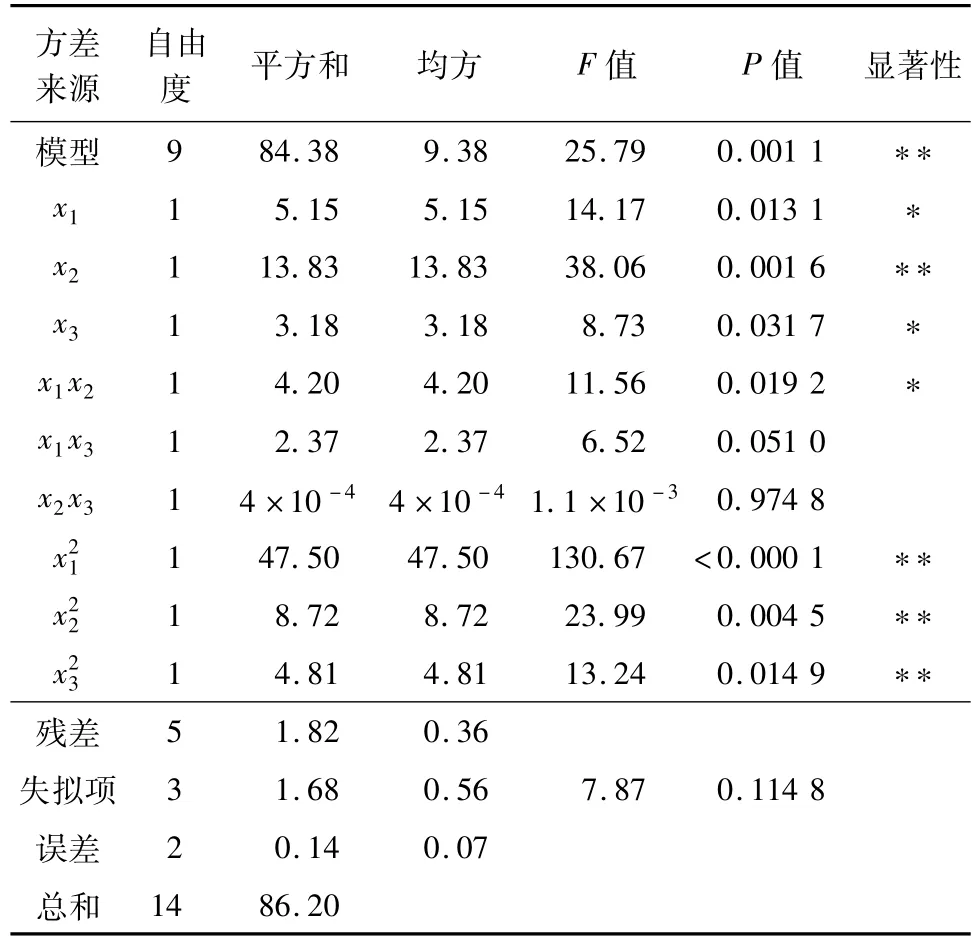
表3 挖掘率的二次项模型方差分析


通过比较F值的大小可得到,影响挖掘率的因素由大到小为入土隙角、铲面倾角、作业速度.
3.3 响应曲面分析
通过显著性检验结果,交互作用对挖掘率影响显著仅仅为x1x2.根据回归模型式(14)且将作业速度控制在0水平,取值为0.8 m·s-1,如图7所示.
总之,碳市场是个复杂、系统、长期的工程,它的发展必然是渐进的。合理有序发展碳市场有助于我国低成本实现减排目标,亦有助于国际谈判与合作,体现出我国争做全球气候治理贡献者和引领者的担当,最终助力于全球应对气候变化、实现低碳发展。
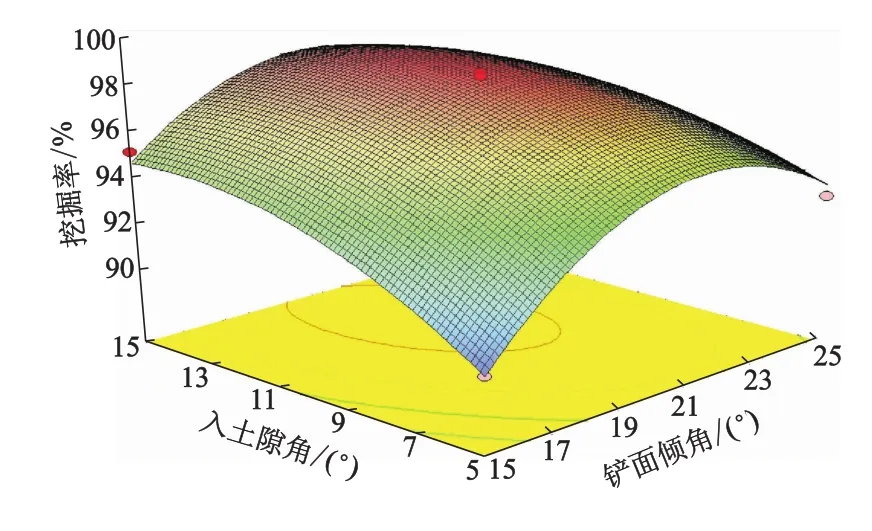
图7 入土隙角与铲面倾角对挖掘率的影响响应曲面
随着铲面倾角和入土隙角的增大,挖掘率先增大后减小,当铲面倾角和入土隙角增大到一定程度时,部分三七与土壤混合物在未达到升运装置上提前回落,致使挖掘率呈下降趋势.从图中的等高线看出,挖掘率沿入土隙角方向的变化速率比铲面倾角方向的变化速率快,即入土隙角对挖掘率的影响大于铲面倾角对挖掘率的影响.入土隙角在9°~11°,铲面倾角在19°~21°时,组合式挖掘铲的挖掘率高.
3.4 参数优化
为进一步优化组合式挖掘铲的挖掘作业性能,使用Design Expert8.0.6软件的寻优功能对组合式挖掘铲进行优化.RSM预测寻优因数的取值范围区间分别为铲面倾角15°~25°,入土隙角5°~15°,作业速度0.60~1.00 m·s-1.其参数优化结果为铲面倾角20°,入土隙角12°,作业速度0.75 m·s-1,挖掘率98.69%.
4 模型验证与对比试验
在满足收获率的前提下,机器壅土程度也对三七收获机作业效率有着很大的影响.故采用参数优化后的组合式挖掘铲和普通挖掘铲进行模型验证与对比试验.普通挖掘铲采用多铲,为了有参照性,普通挖掘铲铲型选用本设计的三角平面铲.
4.1 试验方法
在实际生产中没有成熟的三七收获机,故仍使用4QD 170型三七收获机,并通过更换两种挖掘铲来进行试验.选取4QD 170三七收获机前进速度为0.75 m·s-1,挖掘深度为200 mm,两种铲铲面倾角都为20°,组合式挖掘铲入土隙角为12°.各测试指标计算方法如下.
1)挖掘率.三七挖掘率是衡量组合挖掘铲性能最关键的参数.其定义为挖掘铲挖出的三七质量与未挖前三七总质量百分比.三七挖掘率计算方法为

式中:Y1为三七挖掘率,%;W1为掉落在地面上三七的总质量,kg;W2为收获机停止作业时仍在升运装置上三七的总质量,kg;W3为残留在土壤中三七的总质量,kg.
2)有效作业距离.壅土一般是指收获机在作业行进当中挖掘部件及其邻近区域发生土壤滞留、壅堵造成机组无法完成正常收获作业的现象.三七种植时往往需要覆盖一层厚厚的松针叶[10],用挖掘铲进行收获作业时较其他根茎类作物更容易引起壅土.本测试指标用三七收获机开始能正常完成收获作业到产生壅土现象无法作业的作业距离来衡量壅土程度.为方便测试,选用100 m为机组最大作业距离,当超过此距离有效作业距离用MAX表示,统计时按照100 m计算.有效作业距离计算方法如下:

式中:S为有效作业距离,m;L为挖掘铲开始入土到壅土无法作业的距离,m;L0为挖掘铲开始入土到开始稳定正常作业的距离,m;
4.2 试验结果
根据以上分析,由人工观察收获情况并记录计算三七在收获后的挖掘率与有效作业距离,试验结果见表4.
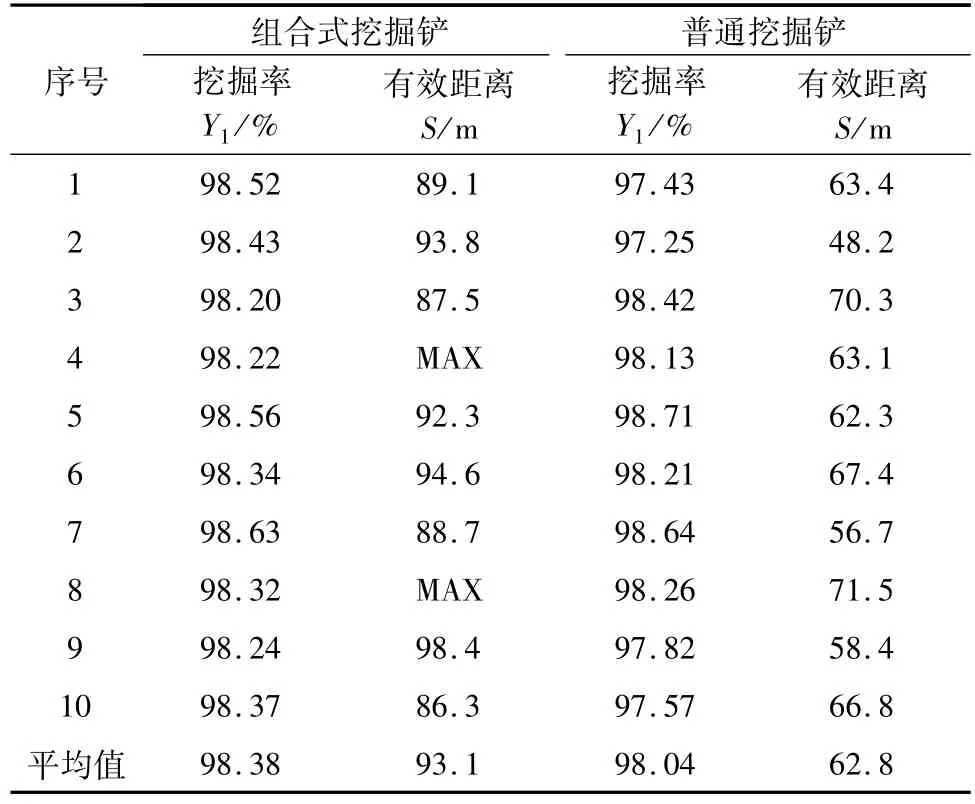
表4 对比试验结果
由表4可以看出组合式挖掘铲挖掘率为98.38%,挖掘率比较稳定,预测值与试验结果很接近,验证了模型优化的准确性.表中普通挖掘铲挖掘率为98.04%也有很高的收获率,但挖掘率不稳定,波动较大.
由表4还可以看出,组合式挖掘铲的有效作业距离为93.1 m,远大于普通挖掘铲的62.8 m,证明组合式挖掘铲壅土现象明显低于普通挖掘铲.这是由于组合式挖掘铲中三角平面铲间的迎土面由土壤破碎铲所代替,土壤破碎铲有破碎土壤减阻的作用,改善了三角平面铲挖掘时的土壤条件,同时又较普通挖掘铲减少了挖掘部件数量,掘起的土壤更少.故组合式挖掘铲有效作业距离要远大于普通挖掘铲.
5 结 论
1)针对三七农艺要求,在满足较高的收获率且减轻壅土现象的问题下,设计了一种新型组合式挖掘铲,并通过试验验证该组合式挖掘铲的可行性.
2)建立了以挖掘率为响应值的回归模型,分析得出了各因素对收获率影响的主次顺序为入土隙角、铲面倾角、作业速度.通过模型中交互作用有显著影响的因素,进行响应曲面分析,得出了铲面倾角与入土隙角对挖掘率的变化规律.应用所建模型优化得到了最佳作业参数:铲面倾角20°、入土隙角12°、作业速度0.75 m·s-1.田间试验挖掘率达到98.38%,与模型优化结果相近,满足作业要求.
3)组合式挖掘铲较普通挖掘铲挖掘率更加稳定,组合式挖掘铲的有效作业距离为93.1 m,普通挖掘铲为62.8 m.组合式挖掘铲壅土现象要远远低于普通挖掘铲,但与土壤、三七动力学特性更为复杂,适应性与可靠性还需要进一步验证.
(References)
[1] 卢汝梅,黄志其,李兵,等.三七化学成分[J].中国实验方剂学杂志,2016,22(7):62-64.LU R M,HUANG Z Q,LIB,et al.Chemical consti tuents of notoginseng radix et rhizoma[J].Chinese Journal of Experimental Traditional Medical Formulae,2016,22(7):62-64.(in Chinese)
[2] 熊敏琪,陈瑜,张腾.三七皂苷临床应用的基础研究进展[J].中医药信息,2014,31(3):119-124.XIONG M Q,CHEN Y,ZHANG T.Basic research ofPanax notoginsengsaponins in clinical application[J].Information on Traditional Chinese Medicine,2014,31(3):119-124.(in Chinese)
[3] 武占东.基于TRIZ理论的三七收获工艺及收获机仿真研究[D].昆明:昆明理工大学,2015.
[4] SHMULEVICH I,ASAF Z,RUBINSTEIN D.Interaction between soil and a wide cutting blade using the discrete elementmethod[J].Soil&Tillage Research,2007,97(1):37-50.
[5] ABO ELNOR M,HAMILTON R,BOYLE JT.Simulation of soilblade interaction for sandy soilusing advanced 3D finite element analysis[J].Soil and Tillage Research,2004,75(1):61-73.
[6] TSUJI T,NAKAGAWA Y,MATSUMOTO N,et al.3D DEM simulation of cohesive soil pushing behavior by bulldozer blade[J].Journal of Terramechanics,2012,49(3):37-47.
[7] KARMAKAR S,KUSHWAHA R L.Dynamic modeling of soil tool interaction:an overview from afluid flow per spective[J].Journal of Terramechanies,2006,43(4):411-425.
[8] 魏宏安,王蒂,连文香,等.4UFD 1400型马铃薯联合收获机的研制[J].农业工程学报,2013,29(1):11-17.WEIH A,WANG D,LIANW X,et al.Development of 4UFD 1400 type potato combine harvester[J].Transac tions of the Chinese Society of Agricultural Engineering,2013,29(1):11-17.(in Chinese)
[9] 郑德聪,赵美香,陈恭良,等.4SB 800型半夏收获机的设计[J].农业工程学报,2007,23(10):141-144.ZHENG D C,ZHAOM X,CHEN G L,et al.Design of 4SB 800 harvesting machine for pinellia ternate breit[J].Transactions of the Chinese Society of Agricultural Engineering,2007,23(10):141-144.(in Chinese)
[10] 杨然兵,范玉滨,尚书旗.动力圆盘式花生挖掘装置的设计与效果试验[J].农业工程学报,2014,30(10):29-36 YANG R B,FAN Y B,SHANG SQ.Design and effect test of dynamic disk digging equipment of peanut com bine[J].Transactions of the Chinese Society of Agricul tural Engineering,2014,30(10):29-36.(in Chinese)
[11] 崔秀明,朱艳.三七实用栽培技术[M].福州:福建科学技术出版社,2013.
[12] MCKYES E,ALI O S.The cutting of soil by narrow blades[J].Journal of Terramechanics,1977,14(2):43-58.
[13] ITOM,SAKAIK,HATA S,et al.Damage to the surface of potatoes from collision[J].Transactions of the ASAE,1994,37(5):1431-1435.
[14] 刘俊峰,杨欣,马跃进,等.4U 1A型马铃薯收获机的设计[J].农业机械学报,2004,35(3):181-186.LIU JF,YANG X,MA Y J,etal.Design of4U 1A type potato harvester[J].Transactions of the Chinese Society for Agricultural Machinery,2004,35(3):181-186.(in Chinese)
[15] 赵菲菲.牵引式三七收获机的设计与试验[D].昆明:昆明理工大学,2016.
[16] 张孝安.农业机械设计手册[K].北京:中国农业科学技术出版社,2007.
Design and experiment on combined digging shovel of Panax notoginseng harvester
ZHANG Dan1,ZHANG Zhaoguo1,CAO Yonghui2,WANG Faan1
(1.College of Modern Agricultural Engineering,Kunming University of Science and Technology,Kunming,Yunnan 650500,China;2.Kunming Agricultural Mechanization Technology School,Kunming,Yunnan 650034,China)
To solve the soil heap problem before digging shovel ofPanax notoginsengmechanical harvesting,a new type of combined digging shovel with triangular plane shovel and soil crushing shovel was designed and investigated under the premise of not reducing harvest rate.The regression analysis and the response surface analysis were conducted by Design Expert 8.0.6 Software.The structure and the optimum working parameters of the combined digging shovelwere determined with shovel surface angle of 20°,buried gap angle of 12°and operation speed of 0.75 m·s-1.The results of field experiment show that the yield rate is 98.38%,and the correctness of regression model is verified to meet the operation requirements.The harvest effect comparison of the combined digging shovel with the common digging shovel shows that the combined digging shovel is more suitable forPanax notoginsengharvesting with better performance of harvest rate and problem solving of soil heap before digging shovel.
harvester;Panax notoginseng;soil crushing;combined digging shovel;experiment
10.3969/j.issn.1671-7775.2018.01.007
S225.7
A
1671-7775(2018)01-0038-07
张 丹,张兆国,曹永辉,等.三七收获机组合式挖掘铲设计与试验[J].江苏大学学报(自然科学版),2018,39(1):38-44.
2016-12-01
云南省重点新产品开发项目(2014BC007)
张 丹(1990—),男,湖北宜昌人,硕士研究生(443037720@qq.com),主要从事农业机械装备设计与制造的研究.
张兆国(1966—),男,山东单县人,教授,博士生导师(通信作者,zhaoguozhang@163.com),主要从事农业机械装备设计与制造的研究.
(责任编辑 祝贞学)
