滑模控制的异步电机直接转矩控制系统
2018-01-06李少龙唐新雯李文龙庄香豫陈明月
李少龙,唐新雯,李文龙,庄香豫,林 峰,陈明月,赵 琴
(上海理工大学 光电信息与计算机工程学院,上海 200093)
滑模控制的异步电机直接转矩控制系统
李少龙,唐新雯,李文龙,庄香豫,林 峰,陈明月,赵 琴
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对异步电机传统直接转矩控制系统存在转矩脉动大、开关频率不固定以及定子磁链观测器准确度对控制性能有较大的影响等问题。文中设计了一种新型的滑模控制器与观测器,并与空间矢量控制相结合,使得系统在交流调速过程中转矩和磁链能够快速且准确地达到期望值,并且基于这种控制器的直接转矩控制系统能够实现逆变器空间矢量调制,达到逆变器开关的恒频输出。通过实验仿真验证了所设计的控制器和观测器能有效地减小稳态误差,且输出较稳定,能使系统具有更高的稳定性和鲁棒性。
异步电机;直接转矩控制;空间矢量控制;滑模控制;观测器
近年来交流电动机的调速技术和调速性能得到了很大的发展和提高,从最初的恒压频比U/f控制和转差频率控制发展到了矢量控制和直接转矩控制,其中矢量控制技术已经趋于成熟并得到了实际的应用,直接转矩控制技术正成为各国研究的重点[1-4]。直接转矩控制是继矢量控制之后发展起来的一种新型的高性能的交流变频技术,它能直接对转矩进行控制[5-6]。但是传统的直接转矩控制系统产生的转矩脉动较大。本文提出了一种基于无速度传感器技术,以实际的定子磁链和转矩的偏差为基础,设计了一种新型的滑模控制器,使得整个异步电机的直接转矩控制系统在仿真的过程中输出的转矩波动大幅减小,从而提高系统的动态以及稳态性能。
1 异步电机的数学模型
异步电机是一个高阶次、非线性和强耦合的多变量系统,因此对异步电机建立数学模型时,需要考虑多方面的因素[7],在定子两相静止坐标系下的数学模型可以推导得到以定子电流和定子磁链为状态变量的状态方程
pX=AX+Bus
(1)

2 控制算法的设计
2.1 速度控制器的设计
为使异步电机能够快速响应以及转速达到期望的速度,致使转速误差尽可能小,可以采用滑模控制设计整个电机控制系统的速度调节器。根据异步电机的运动方程选择滑模面的切换函数为
S1=n-n*
(2)

(3)
通过利用Lyapunov函数来证明稳定性。选择李雅普诺夫能量函数
(4)
由此可得滑模面存在需满足的条件是K>0且ε>TL[7-11]。
2.2 磁链与转矩的控制器的设计
异步电机的电磁磁链的幅值方程为
(5)
滑模面切换函数为
(6)

pS=C+DU
(7)
其中
为保证系统具有良好的动态响应,应当合理选择滑模控制律。最终可得
(8)
考虑到异步电机定子、转子电阻变化与外界温度等不确定因素有关,当系统状态运动到滑模面时,只要使得S2=0,S3=0就能够达到实际转矩和磁链能够跟踪给定的转矩和磁链值的目的[12]。
2.3 滑模观测器的设计
在上述建立的异步电机的数学模型的基础上,为了避免速度传感器所带来的不便,需要将无速度传感器技术引用到整个异步电机直接转矩控制系统中,下面是给出的基于滑模控制的观测器模型。
(9)
为进一步提高系统的稳定性,提出了改进的滑模观测器,把积分加进去,设计了一个积分滑模观测器,当滑模观测器中加入积分项后,选择S函数如下

(10)

(11)
由李雅普诺夫函数稳定性稳定性条件可得,转速收敛需满足条件[13-15]
(12)
3 系统仿真与分析
将上述控制算法运用到整个异步电机的直接转矩控制系统中,搭建的整个直接转矩控制系统的仿真模型如图1所示。
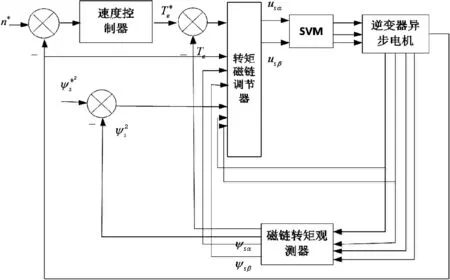
图1 异步电机直接转矩控制系统
根据图1所示的直接转矩控制结构框图,可以在Matlab/Simulink中用相关模块搭建仿真模型,仿真时所用的异步电机参数为:电机额定功率为1 500 W,额定电压为400 V,额定转速为1 500 r/min,频率为50 Hz,极对数为2,定子电阻为0.214 7 Ω,转子电阻为0.220 5 Ω,定子电感为0.99 H,转子电感为0.99 H,互感为0.064 H,转动惯量为0.102 kg·m2,给定磁链大小为0.8 Wb,给定转速为1 400 r/min。在t=0 s时电机开始空载起动,仿真时间为1 s。电机转速、转矩、定子电流的波形如图2所示。
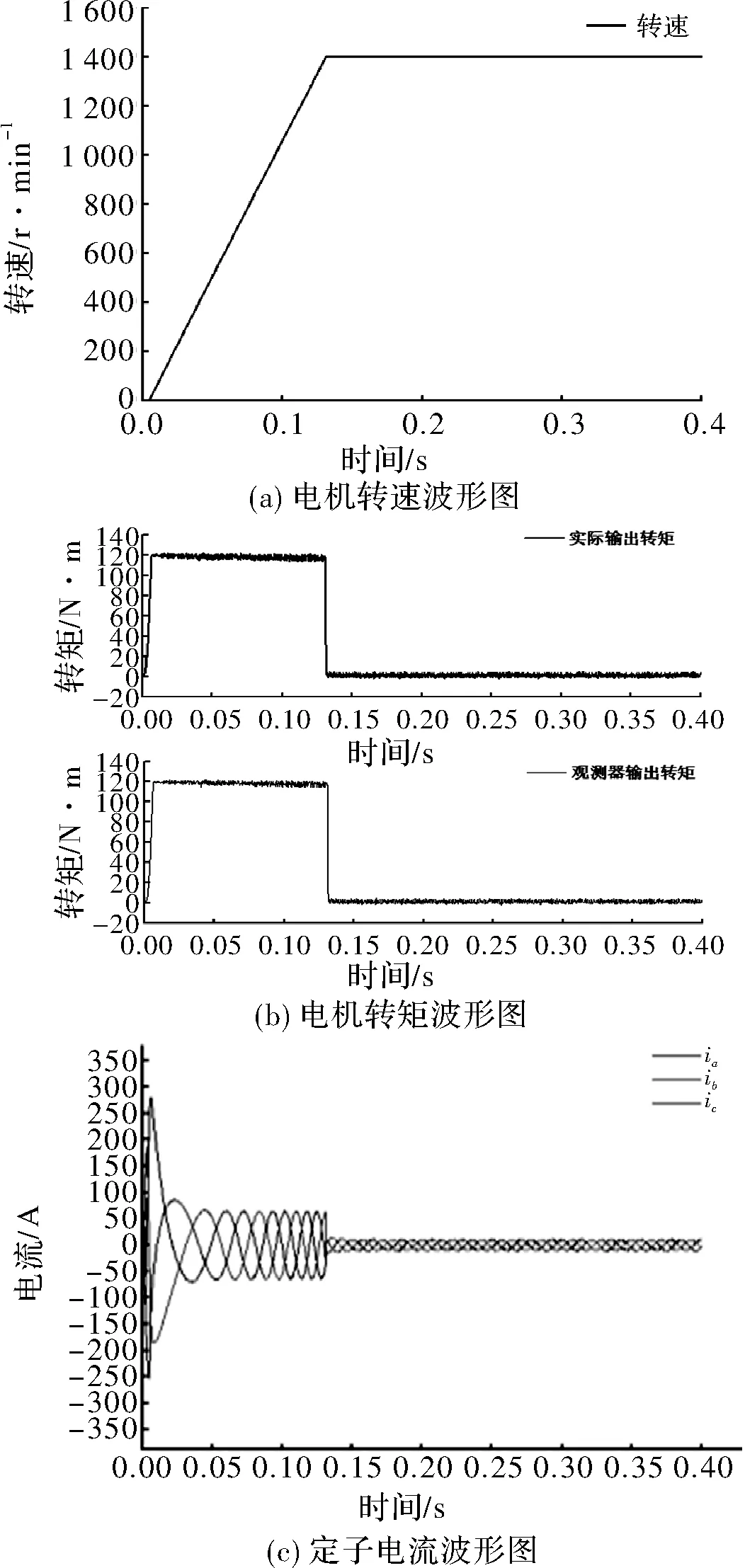
图2 仿真波形图
在传统直接转矩控制系统中,转矩磁链控制器采用磁链转矩滞环比较器,在相同的条件下,得到的电机转速、电磁转矩、定子电流的波形如图3所示。
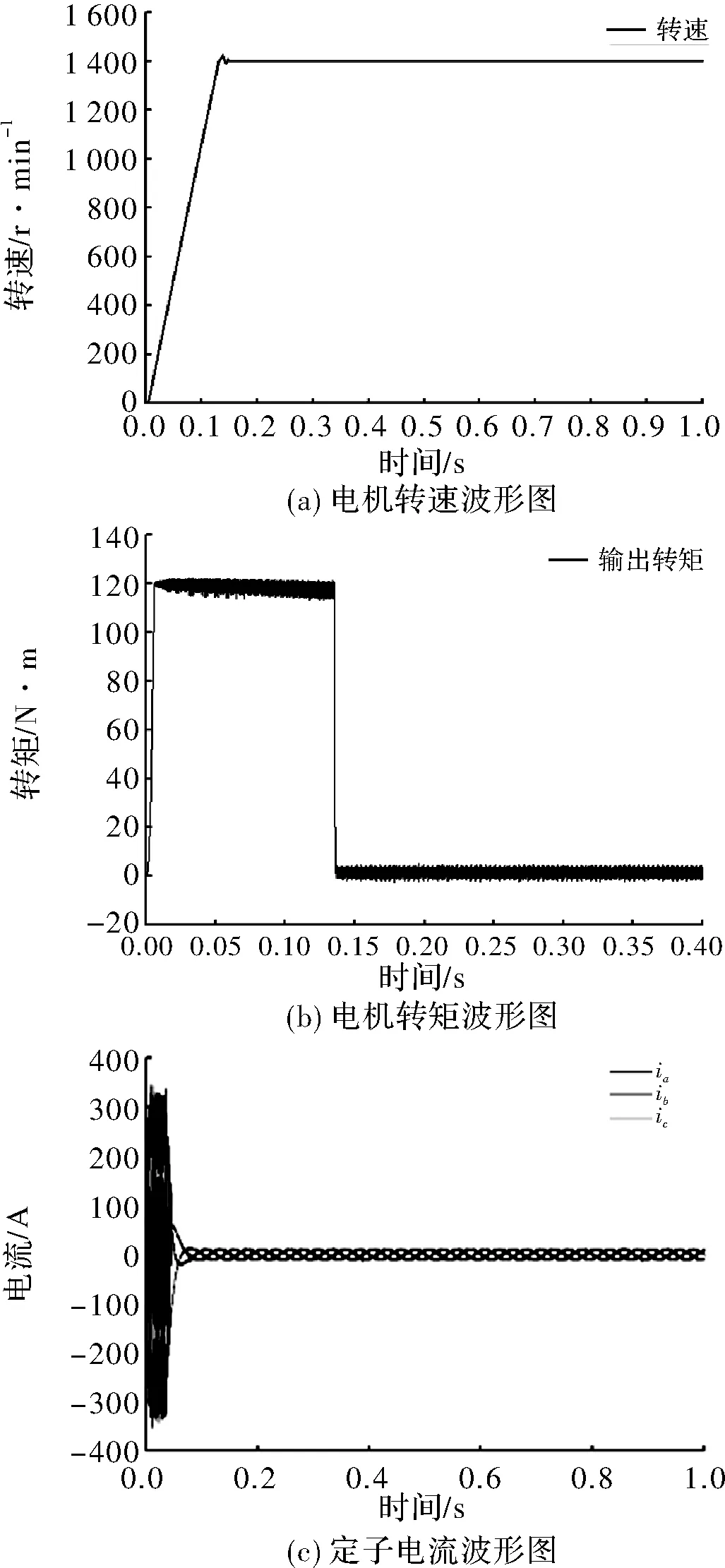
图3 仿真波形图
由图2和图3可知,改进的直接转矩控转矩和磁链脉动明显减小了,控制系统具有更好的稳态和动态性能,控制器和滑模观测器彼此结合不仅能够使电机转速上升较快且平稳,也能够无超调的达到给定速度。
当给定转速为150 r/min,0.4 s时增加负载转矩40 N·m,仿真时间为1 s,得到的转矩、转速、定子电流波形图如图4所示。从图中可以看出,当电机突然带载启动时,系统具有良好的抗干扰性,系统具有较好的动态性能。
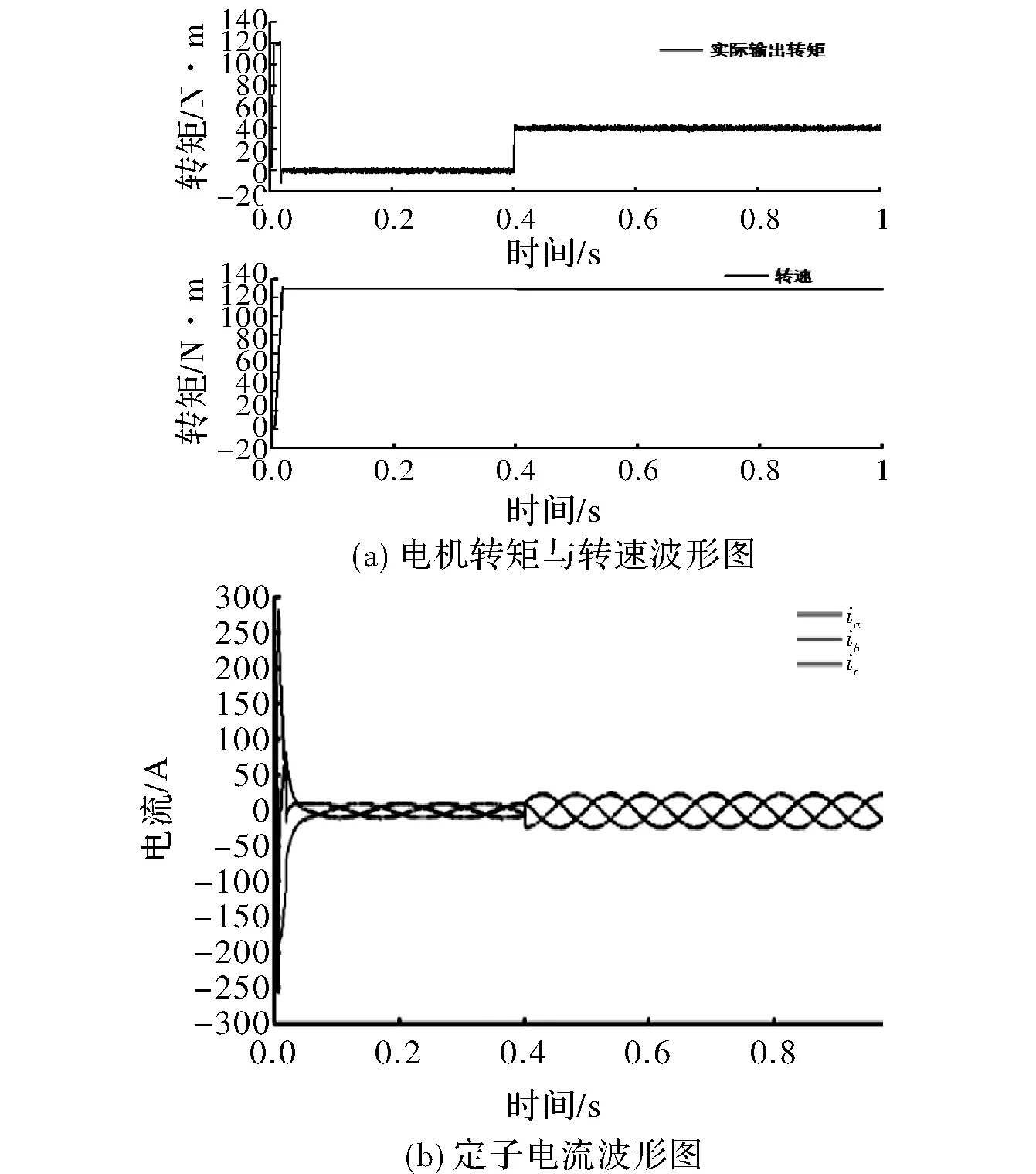
图4 仿真波形图
给定转速为1 450 r/min,0.4 s时增加负载转矩40 N·m,仿真时间为1 s,得到的转矩、转速、定子电流波形如图5所示。同样可以看出,电机以高速运行时,突然加载,受扰动影响也较小。
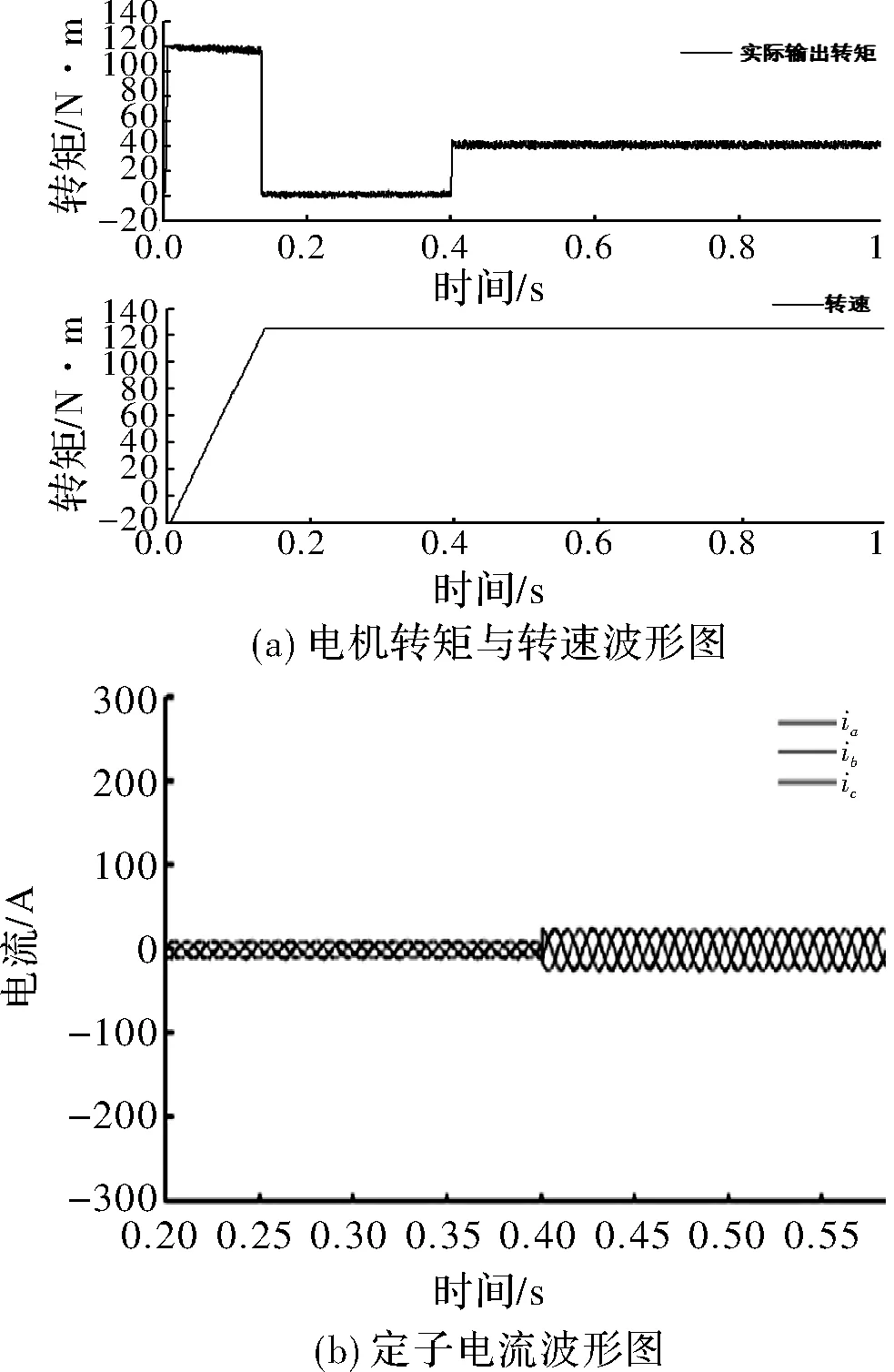
图5 仿真波形图
由仿真结果可以看出:电机实际的速度能迅速地变化且无超调,在给定转速恒定的情况下,能快速跟踪,说明直接转矩控制确实具有优良的动、静态性能。定子电流谐波影响小,在静、动态过程中定子磁链运动轨迹保持近似圆形,有效地减小了电机参数变化时磁链的脉动。无论是电机处于低速或高速的情况下,突然加载,电机的转矩动态响应较快,脉动波动较小,所以能够很好地改善整个直接转矩控制系统的稳态性能。
4 结束语
本文提出了基于异步电机直接转矩控制系统的滑模控制器与观测器,主要是将无速度传感器技术应用到直接转矩控制系统中。相较于传统的直接转矩控制系统,设计的滑模观测器对速度辨识快速且准确,对定子磁链观测精度高,系统既能够保证高速时稳定运行以及低速时能够很好的调节转速,大幅减小了转矩和磁链脉动,同时也在一定程度上提高了系统的鲁棒性。
[1] 张华强,王新生,魏鹏飞,等.基于空间矢量调制的直接转矩控制算法研究[J].电机与控制学报,2012(6):13-18.
[2] 邱鑫,黄文新,杨建飞,等.一种基于转矩角的永磁同步电机直接转矩控制[J].电工技术学报,2013(3):56-62.
[3] DaniellBullo,Antonella Ferrara,Matteo Rubagotti.Sliding mode observers for sensorless control of current-fed induction motors[C].MA,USA:American Control Conference,2011.
[4] Yu Zhiyan,Zheng Yong.Speed sensorless direct torque control ofasynchronous motor with stator resistance identification [J]. Electric Drive,2011,31(5):10-14.
[5] 李政学,张永昌,李正熙,等.基于简单占空比调节的异步电机直接转矩控制[J].电工技术学报,2015(1):72-80.
[6] 林磊,邹云屏,钟和清,等.基于固定合成矢量的三电平异步电机直接转矩控制[J].中国电机工程学报,2008,27(4):120-125.
[7] Wei Jianhong,Li Xiaoqian,Zheng Yan. Research on the direct torque control for asynchronous motor based on the sliding mode variable structure control[C].Hefei:Chinese Control and Decision Conference,2012.
[8] 程启明,王映斐,薛阳,等.采用定子电阻辨识和无速度传感器的异步电机直接转矩控制模糊系统[J].高电压技术,2012(3):704-711.
[9] Shi Hongyu,Feng Yong.High-order terminal sliding mode FluxObserver for induction motors[J].Acta Automatica Sinica, 2012,38(2):288-294.
[10] Wang Lei,Wang Jing,Zhang Yongjun.Research on direct torque control ofinduction motor based on sliding mode variable structure[J].Powerelectronic Technology,2010,4(1):45-51.
[11] Zhou Yangzhong,Hu Yuwen.Direct torque control of AC motor[M].Beijing:Machinery Industry Press,2010.
[12] 周雅薇,聂建华.电动汽车电机驱动系统效率优化控制[J].电子科技,2013,26(5):37-40.
[13] 曾峰林,陈家琪.基于模糊滑模控制的车辆稳定性研究[J].电子科技,2015,28(7):165-168.
[14] 胡海旭,罗文广.基于神经网络仿射非线性系统滑模自适应控制[J].电子科技,2011,24(4):12-14.
[15] 辛静,赵高晖,李天箭,等.倒立摆系统控制研究[J].电子科技,2016,29(12):159-161.
Asynchronous Motor Direct Torque Control System Based on Sliding Mode
LI Shaolong,TANG Xinwen,LI Wenlong,ZHUANG Xiangyu,LIN Feng,CHEN Mingyue,ZHAO Qin
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
In terms of the direct torque control system for asynchronous motor, it has larger torque ripple, unfixed switch frequency and the accuracy of the stator flux observer has a large influence on control performance. In this paper, a new kind of sliding mode controller and observer is designed in the direct torque control system which combined with space vector control. The controller can make the torque and flux reach the expected value quickly and accurately, and the direct torque control system can realize the inverter space vector modulation, then achieved the constant frequency of inverter switch output.Finally, by the simulation results and analysis, the designed controller and observer can effectively reduce the static error, and the output is stable, then it can also make the system have better stability and robustness.
asynchronous motor; direct torque control system; space vector control; sliding mode controller; observer
2017- 03- 27
国家自然科学基金(61205076) ;电动叉车控制器的研发(3A16302075)
李少龙(1972-),男,讲师。研究方向:电力电子非线性及其控制和电机及其控制。
TN 787
A
1007-7820(2018)02-077-04
