一种浮动锁销式柔性气浮组件的承载特性测试及分析
2018-01-05陈飞飞王宏许红亮黄利强肖杰
陈飞飞,王宏,许红亮,黄利强,肖杰
一种浮动锁销式柔性气浮组件的承载特性测试及分析
陈飞飞,王宏,许红亮,黄利强,肖杰
(上海宇航系统工程研究所,上海 201109)
为在空间机构产品集成与测试中合理使用气浮组件,采用刚度试验台模拟加载的方案对一种浮动锁销式柔性气浮组件的承载特性进行测试。试验结果表明:浮动锁销式柔性气浮组件在未预压缩状态下,承载特性近似为线性弹簧压缩模型;在预压缩状态下,初始承载特性近似为刚体,承载力超过气浮组件的保持力后承载特性近似为线性弹簧压缩模型。因此,为避免气浮组件在承载过程中表现出的作用力与位移变化等特性对空间机构产品的运动特性、系统性能造成显著的附加影响,气浮组件在使用前应根据产品重力调节弹簧预压缩量,并严格控制4组可调弹簧支撑组件的制造误差;同时,在产品重力完全被卸载之前需要借助压紧释放机构或刚性支撑工装对产品进行约束。
空间机构;微重力模拟;柔性气浮组件;承载特性;测试试验
0 引言
空间机构地面微重力模拟方法主要有跌落法、抛物线飞行法、水浮力法、气浮法、悬吊法等[1]。其中气浮法因结构形式简单、承载能力强、对产品附加阻力小而被广泛应用于卫星天线、太阳电池阵、机械臂等空间机构的微重力模拟展开测试[1-3]。气浮组件是气浮法的关键执行元件,主要由气垫单元和支撑组件组成。气垫单元上设计有通气小孔,在供气状态下,气垫单元与气浮平台之间会形成“气膜”并保持一定刚度,通过支撑组件传递、托举产品,实现空间机构测试所需求的微重力模拟以及低阻尼运动。由于气浮平台平面度、水平度及气浮平台拼缝高度差的存在,产品展开测试过程中气浮组件支撑高度存在小幅度的波动,而高刚度气浮组件支撑高度的变化会引起作用力突变,产生附加阻尼,影响空间机构的运动特性。此外,产品展开测试过程中随着机构形态的动态变化,产品质心位置会有小幅度变化,分配至气浮组件上的承载力会有几N至上百N的变化,将导致低刚度气浮组件支撑高度的显著变化,影响产品机械指向精度等系统性能。因此,有必要对气浮组件承载特性进行深入研究。目前国内关于刚性气垫单元承载特性开展了较多的研究:孙建辉等[4]基于气体的运动方程、质量连续性方程和状态方程,对一种带有均压槽设计的环形刚性气浮垫进行建模,获取了气膜厚度与承载力之间的关系;董皓、张君安等[5-6]分别从试验与数值模拟角度系统分析了一种矩形空气静压导轨气浮垫的承载能力和刚度。而关于气浮组件整体承载特性的研究尚未见报道。
本文结合工作原理以及不同工况下的加载测试,对一种浮动锁销式柔性气浮组件的整体承载特性进行分析,获取了弹簧预压缩量、可调弹簧支撑组件制造误差、气垫气膜厚度变化等因素对卸载前后产品状态的附加影响规律,可为制定柔性气浮组件使用规范并使其合理地应用于空间机构产品微重力展开测试提供参考。
1 浮动锁销式柔性气浮组件结构和工作原理
为避免产品运动过程中由于气浮组件支撑高度变化引起作用力突变,产生运动卡滞,要求气浮组件具备一定的柔性自适应能力。本文研究的一种柔性气浮组件结构(如图1所示)主要由高刚度气垫、产品连接板以及周向均布的4组可调弹簧支撑组件组成。其中可调弹簧支撑组件采用“弹簧−浮动锁销”的柔性结构形式,通过锁紧螺母调节弹簧压缩量可以使气浮组件具备一定程度的保持力。产品测试过程中当分配至气浮组件上的力小于此保持力时,依靠浮动轴与导向轴之间的锁销定位,可以保证产品连接板与气垫之间的高度保持不变,进而保证气浮组件支撑高度不变,保障产品测试精度;当分配至气浮组件上的力略大于此保持力时,产品连接板推动4根浮动轴沿着导向轴向下进一步压缩弹簧,使得产品与气浮组件之间的作用力不会产生突变,保证展开顺畅。
2 承载特性测试方案
气浮组件在承载过程中所表现出的作用力与位移变化等特性将直接影响空间机构的运动特性以及系统性能。为对浮动锁销式柔性气浮组件的承载特性进行测试,采用刚度试验台对气浮组件的连接板进行模拟加载,模拟展开测试过程中产品施加的负载,如图2所示。加载过程为匀速加载,气浮组件的位移量变化通过布置在连接板两端的2个位移传感器进行采集,加载力通过刚度试验台自带的压力传感器进行监测。其中,位移传感器的分辨率为0.001mm,力传感器分辨率为0.01N。
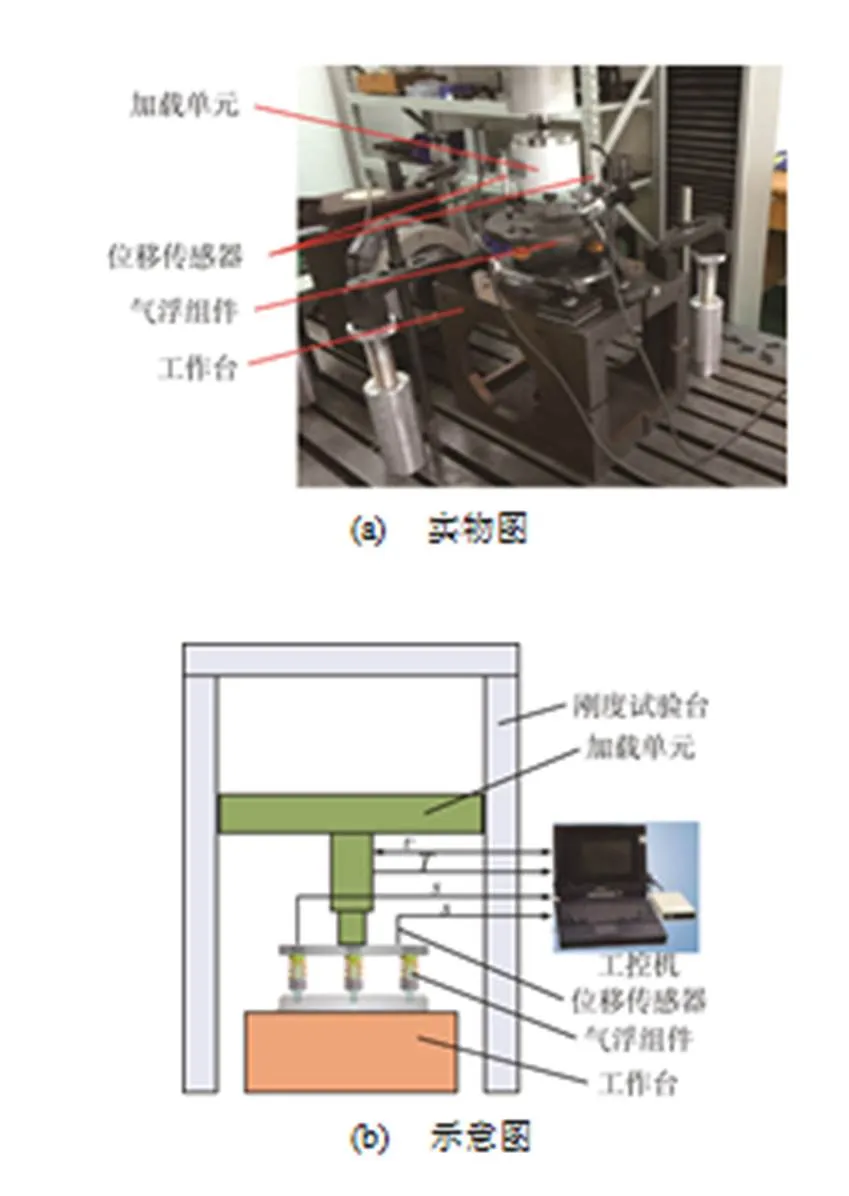
图2 气浮组件加载测试方案
3 试验结果与分析
3.1 未预压缩状态下的气浮组件承载特性
浮动锁销式柔性气浮组件整体结构基于4根弹簧并联压缩模型。对同一批次的4根弹簧分别进行单向压缩刚度系数测试,通过自由加载获取其承载曲线(如图3所示),加载速率为2mm/min。由图3可见,这4根弹簧的承载曲线的线性拟合值都达到0.9996以上,说明它们的弹簧刚度系数稳定,刚度系数约为36.74N/mm,刚度偏差约4.7%。
采用该批次弹簧组装气浮组件,在弹簧未预压缩状态下,通过刚度台对气浮组件连续进行3次加载,获得气浮组件的承载曲线,如图4所示。由图可见,浮动锁销式柔性气浮组件在未预压缩状态下的承载特性近似为标准的线性弹簧压缩模型,刚度系数稳定。由于气垫组件在承受负载下压过程中导向轴与弹簧、浮动轴之间会产生摩擦,所以浮动锁销式柔性气浮组件的实际整体结构刚度为172.3N/mm,略大于4根弹簧并联组合后的理论刚度146.96N/mm。因此,实际弹簧预压缩量的确定应以气浮组件整体实测刚度数据为准,以提高气浮组件整体卸载精度。
3.2 不同预压缩量下的气浮组件承载特性
气浮组件的可调弹簧支撑组件采用了“弹簧-浮动锁销”的柔性结构形式,以适应不同重量产品的卸载需求。对不同弹簧预压缩量下的气浮组件进行加载试验,加载速率为0.5mm/min,弹簧预压缩量依次为3、5、7mm,试验结果如图5所示。从图5可看出,不同弹簧预压缩量下,气浮组件的承载曲线的整体变化趋势一致,大致可分为2段:第1段刚度较大,第2段刚度接近自由状态,曲线拐点处的加载力值即气浮组件的最大保持力。当加载力小于最大保持力时,气浮组件的承载特性近似于刚体;当加载力大于最大保持力后,气浮组件的承载特性近似为线性弹簧压缩模型。
因此,为避免因高刚度可能带来的作用力突变导致产品运动卡滞以及气浮组件卸载前后位移量变化太大而影响产品装配精度,应在气浮组件使用前,根据产品实际卸载力需求及气浮组件整体实测刚度确定弹簧的预压缩量,使产品卸载力与气浮组件的保持能力相匹配。
3.3 不同制造误差状态下的气浮组件承载特性
如图1所示,气浮组件采用周向均布的4组可调弹簧支撑组件连接气垫与产品连接板,考虑到在同样的弹簧压缩量下、不同的可调弹簧支撑组件高度制造误差可能会影响气浮组件整体使用性能,选取2组不同制造误差状态的可调弹簧支撑组件进行加载试验,加载速率为0.5mm/min。
试验前,将弹簧预压缩量均调节为7mm,弹簧支撑组合A与组合B的可调弹簧支撑组件高度值参见表1。其中组合A的4组可调弹簧支撑组件高度较为一致(最大偏差0.06mm),组合B的制造偏差相对较大(最大偏差0.24mm)。加载试验结果如图6所示。

表1 可调弹簧支撑组件高度
从图6可看出,可调弹簧支撑组件高度较为一致时(组合A)加载曲线分为2段:段加载力小于气浮组件的保持力,气浮组件近似于刚体;段加载力超过气浮组件的保持力后,气浮组件近似为线性弹簧压缩模型。可调弹簧支撑组件高度一致性较差(组合B)时加载曲线分为4段:起始阶段为3组弹簧受力状态,在加载力未达到3组预压缩弹簧形成的保持力前(段),气浮组件表现为近似于刚体;加载力超过3组预压缩弹簧形成的保持力后,3组弹簧被继续压缩,气浮组件表现为段的线性弹簧压缩模型;在第2阶段末,第4组弹簧开始受力,当加载力未达到4组预压缩弹簧形成的保持力前(段),气浮组件依然表现为近似于刚体;加载力超过4组预压缩弹簧形成的保持力后,弹簧被继续压缩,表现为段的近似线性弹簧压缩模型。
弹簧支撑组合A在加载至其最大保持力1191.4N时仅发生0.033mm的位移,对产品状态附加影响甚微;而弹簧支撑组合B在加载至1191.4N时的对应位移量则达到了0.311mm,将影响产品装配精度、增加产品内应力,对后续产品展开测试带来不利影响。这种因制造误差导致的4组弹簧未能在小位移下建立起理想工作模式的过渡状态被称为气浮组件的空程。空间机构产品运动特性、系统性能对高度变化越敏感,空程所造成的附加影响越显著。
因此,针对本文研究的浮动锁销式柔性气浮组件,必须对可调弹簧支撑组件的制造误差进行严格控制,避免空程现象,提高产品展开可靠性。
3.4 承载过程中的气膜厚度变化特性
根据气浮组件的工作原理,气浮组件实际使用过程中需要供气,在气垫单元与气浮平台之间形成气膜。研究表明,不同气膜厚度下刚性气垫对应的承载能力不同[4-5],因此在产品重力完全作用在气浮组件的过程中,气浮组件与气浮平台之间的膜厚会发生变化,而这一高度变化量可能会影响产品装配精度,增加产品内应力。为研究气浮组件在承载过程中的气膜厚度变化特性,在供气状态下,采用图2所示方案对气浮组件进行加载测试,气压为0.6MPa,试验结果如图7所示。从图7可看出,加载过程中气膜厚度由0.3mm压缩至0.1mm,然后逐渐稳定,而这0.2mm的高度差将导致产品装配精度发生变化。
为确保产品展开试验的可靠性,必须制定合理的安装工艺流程,在产品重力完全作用在气浮组件之前,借助产品本身的压紧释放机构[7]或刚性支撑工装对产品高度状态进行刚性约束;然后再调整分配至气浮组件上的支撑力,使得气膜厚度调整至产品支撑力对应的气膜厚度范围;之后方可进行产品的气浮展开测试。
4 结论
1)浮动锁销式柔性气浮组件在未预压缩状态下承载特性近似为标准的线性弹簧压缩模型,由于气垫组件承受负载下压过程中结构摩擦的存在,气浮组件的刚度会略大于4根弹簧并联组合后的理论刚度,实际弹簧预压缩量的确定应以气浮组件整体实测刚度数据为准,以提高气垫组件的控制精度。
2)在预压缩状态下,浮动锁销式柔性气浮组件的初始承载特性近似为刚体;承载力超过气浮组件的保持力后,承载特性近似为线性弹簧压缩模型。不同预压缩量下,气浮组件对应的保持力不同。为避免因高刚度可能带来的作用力突变,气浮组件在使用前应根据产品重量调节弹簧预压缩量,使得产品重力与气浮组件保持力相匹配。
3)多组可调弹簧支撑组件高度制造误差将导致气浮组件在承载过程中存在空程现象,影响产品展开可靠性,故应在使用前对弹簧支撑组件的高度制造误差进行严格控制及选配。
4)因逐渐加载过程中气膜厚度会产生较大变化,应明确气浮组件安装工艺流程,在产品重力完全卸载之前需借助产品自身压紧释放机构或刚性支撑工装对产品进行约束,然后再进行气膜厚度的调整,以避免影响产品展开的可靠性。
[1] 从强. 空间机构地面重力补偿设备跟踪研究[J]. 航天器环境工程, 2012, 29(1): 92-99
CONG Q.An investigation into gravity compensation equipment for space mechanisms[J].Spacecraft Environment Engineering, 2012, 29(1): 92-99
[2] 刘松, 邹义成, 丁瀛, 等. 大型太阳电池阵模态试验方法[J]. 航天器环境工程, 2013, 30(2): 165-170
LIU S, ZOU Y C, DING Y, et al. Modal test for large solar array[J]. Spacecraft Environment Engineering, 2013, 30(2): 165-170
[3] 叶平, 何雷, 宋爽, 等. 空间机械臂地面微重力混合模拟方法研究[J]. 机器人, 2013, 35(3): 299-305
YE P, HE L, SONG S, et al. A hybrid method for microgravity simulation of space robotic manipulator[J]. Robot, 2013, 35(3): 299-305
[4] 孙建辉, 钟武强, 袁巧玲, 等. 带有均压槽的环形气浮垫设计[J]. 轻工机械, 2013, 31(5): 80-84
SUN J H, ZHONG W Q, YUAN Q L, et al. Design of annular floatation cushion with pressure-equalizing groove[J]. Light Industry Machinery, 2013, 31(5): 80-84
[5] 董皓, 张君安, 刘波. 矩形空气静压导轨气浮垫的实验性能对比[J]. 机电产品开发与创新, 2010, 23(1): 32-34
DONG H, ZHANG J A, LIU B. Experimental performance comparison of rectangular floatation cushion for pneumato-static slideway[J]. Development&Innovation of Machinery&Electrical Products, 2010, 23(1): 32-34
[6] 张君安, 董皓, 刘波. 矩形空气静压导轨气浮垫性能的数值分析[J]. 机械科学与技术, 2011, 30(1): 120-123
ZHANG J A, DONG H, LIU B. Numerical analysis of the performance of a rectangular floatation cushion with high stiffness for pneumato-static slideway[J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(1): 120-123
[7] 于登云, 孙京, 马兴瑞. 大型构件伸展与锁(压)紧释放技术[J]. 航天器环境工程, 2007, 16(1): 165-170
YU D Y, SUN J, MA X R. Deployment and hold-down and release mechanism of large space component[J]. Spacecraft Environment Engineering, 2007, 16(1): 165-170
(编辑:张艳艳)
Experimental analysis of the bearing characteristics of a floating lockpin type flexible flotation device
CHEN Feifei, WANG Hong, XU Hongliang, HUANG Liqiang, XIAO Jie
(Shanghai Institute of Aerospace Systems Engineering, Shanghai 201109, China)
In order to use theflotation device reasonably in the product integration and the test of the space mechanism, the bearing characteristics of a floating lockpin type flexible flotation device are tested by using a stiffness test bed under an analog loading. The results show that the bearing characteristics of the flotation device can be approximated by a linear spring compression model for the flotation device not being pre-compressed. When the flotation device is pre-compressed, the bearing characteristics of the flotation device can be approximated by a rigid body in the initial stage. As the bearing capacity exceeds the holding force of the flotation device, the bearing characteristics of the flotation device can be approximated by a linear spring compression model. In order to avoid the serious influence of the change of force and displacement in the loading process of the flotation device on the motion characteristics and the system performance of the space mechanism, the spring pre-compression of the flotation device should be adjusted according to the gravity product before the flotation device is used. In addition, the manufacturing errors of four groups of adjustable spring support assemblies should be strictly controlled. Moreover, the product should be constrained by using a release mechanism or a rigid support device before the gravity of the product is completely balanced.
space mechanism; microgravity simulation; flexible flotation device; bearing characteristics; measurement and test
V416.8
A
1673-1379(2017)06-0631-05
10.3969/j.issn.1673-1379.2017.06.010
陈飞飞(1988—),男,硕士学位,从事空间结构机构集成测试研究工作。E-mail: 315401411@qq.com。
2017-05-10;
2017-11-22
上海航天技术研究院材料与工艺自主研发项目“平面SAR天线多环闭环链机构装配精度预测及调整技术研究”(编号:Z13065)
