活立木图像分割算法研究
2018-01-03代英鹏王昱潭薛君蕊高垚垚刘博瀚马程浩
代英鹏 王昱潭 薛君蕊 高垚垚 刘博瀚 马程浩
(宁夏大学机械工程学院 宁夏 银川 750021)
活立木图像分割算法研究
代英鹏 王昱潭*薛君蕊 高垚垚 刘博瀚 马程浩
(宁夏大学机械工程学院 宁夏 银川 750021)
为了更好地避免图像过分割的缺陷,提高机器识别的准确度,提出一种基于分水岭算法的活立木图像分割算法。通过分析分水岭算法在实际分割中存在缺陷的原因,使用前处理与后处理相结合的方法克服过分割的缺陷。使用形态学重建技术进行图像前处理;使用分水岭算法对图像进行分割,并且利用标记对象法对图像进行标记;利用目标对象的色彩信息进行区域合并以及去除多余水坝,最终得到分割图像。针对10幅活立木图像,通过与人工分割的方法进行比较,所提出的基于分水岭算法的活立木图像分割算法能够有效地提取活立木的目标区域,分割的正确率达到88.42%。
图像处理 特征提取 活立木 分水岭算法
0 引 言
人工驾驶采育机进行林间作业具有很多的弊端[1]。对此,诸多国家很早就对林业自主机器人进行了研究[2-3]。近年,我国在农林业自动化方面的发展也较为迅速[3-6]。他们都以机器视觉系统为基础,检测辨识前方的物体以及测定物体的尺寸等。这些研究为自主机器人的研制提供理支持。
对于林木综合采育机自动识别活立木的过程中,林间活立木图像的实时处理与识别是其关键技术。而对活立木的特征提取又是图像处理与识别的关键点与难点。在图像中提取目标物的关键问题是图像分割,图像分割的准确程度直接决定了目标物提取的准确度,也影响着机器自动识别活立木的准确度。目前,图像分割的方法多种多样[7-9]。其中,分水岭算法的应用非常广泛。但由于直接使用分水岭算法,往往会出现严重的过分割现象,所以本文对分水岭算法进行改进,使其能够很好地克服这种缺陷。
1 概 述
传统的分水岭算法常使被分割图像出现过分割的缺陷,从而难以对物体的特征进行有效的提取。为消除这一缺陷,目前主要的解决方法是将其与前处理方法结合使用。对于简单的前处理方法,抑制过分割的效果不够明显,而复杂的前处理方法又不能满足实时处理的要求。本文提出基于梯度分水岭的活立木图像分割算法,采用前处理与后处理相结合的方法,首先对图像进行基于形态学重建技术的前处理,达到减轻或抑制过分割的目的。随后利用标记提取以及统计学原理对图像进行合并的后处理,最大程度、准确地提取活立木的目标区域。
2 材料与方法
2.1 活立木的图像采集
图像采集系统硬件设备为联想手机与惠普PC机。手机型号为Lenovo P700手机,800万像素,PC机型号为HP Pavilion g series,Inter(R) Core(TM) i3-2310M CPU @ 2.10 GHz,内存2.00 GB,Windows 7旗舰版32位操作系统。在晴天自然光源下进行采集,以JPG格式储存。为方便实验,将图像裁剪为650×900大小,如图1所示。

图1 原图像
2.2 图像的预处理
在图像获取或传输的过程中,可能会被高斯噪声[10]、椒盐噪声[11]以及混合噪声[12]等污染。本文图像预处理方法是3×3均值滤波处理[13]。
对图像采用3×3均值滤波,则在像素(i,j)处,其邻域Z像素分布如表1所示。

表1 像素的邻域分布
以g(i,j)代替原像素(i,j)处的像素值:
(1)
其对应的3×3卷积模板为:
在RGB颜色空间,用3×3均值滤波对有噪声的图像进行滤波,由于其对R、G、B颜色通道使用相同的模板进行处理,所以对通道之间相互联系的影响较小,有效地避免了因忽略各通道之间的联系而使图像失真而导致图像分割不准确的后果。图2为预处理结果。

图2 预处理结果
2.3 基于分水岭算法的前处理
对图像进行分水岭分割的前处理,在一定程度能够减少过分割现象,有利于目标区域的提取。算法需要将前景对象与背景对象分开并进行标记,在此将使用形态学重建技术、欧式距离变换等。
算法需要将图像的背景对象与前景对象区别,可以通过形态学重建技术来完成。形态学重建技术通过对原始图像进行滤波,可以在保护重要轮廓信息的同时起到消除噪声的作用。经过形态学处理的图像,通过控制结构元素的大小,可以使不同区域之间的灰度差变大以及消除区域内部的部分极值,以此来区别前景与背景对象,并使前景与背景对象内部的灰度值变化趋于平缓。经过形态学处理的图像如图3(a)。寻找分水岭的谷底与边界,分别通过寻找局部最大值与欧式距离变换实现,结果如图3(b)。经过以上技术对图像进行前处理,进而使用分水岭算法进行图像的分割,结果如图3(c)。
2.4 基于特征参数法的后处理
通过前处理的图像消除了大部分过分割,但是依然存在图像分割不准确等问题。对分割图像进行合并的后处理分为不同区域的合并以及对合并区域水坝的去除。
根据图像的颜色信息,活立木灰度图像的灰度值整体比较高,则首先计算通过标记的每个区域的灰度的平均值:
(2)
式中:P(t)为t区域的灰度平均值,I(i,j)为t区域的(i,j)处的灰度值,area(t)为t区域的面积(或像素数)。设定合并阈值T,t区域的灰度值I(t):
(3)
通过每个区域平均灰度值与阈值的比较,对不同区域进行合并,如图4(a)。
划分区域的水坝为单像素值,利用形态学开启与闭合去除水坝。
开启:X∘B=(XΘB)⊕B
闭合:X·B=(X⊕B)ΘB
式中:X表示形态学处理图像;B表示结构元素;此处结构元素使用半径为1的圆盘;Θ表示形态学腐蚀;⊕表示形态学膨胀。通过开启与闭合操作,可以有效去除区域之间的水坝,结果如图4(b)。

图4 分水岭分割的后处理
3 算法步骤
本文为分割活立木图像,综合利用了分水岭算法基于标记提取的前处理以及对分割图像进行合并的后处理,分割出最终的目标区域,算法流程图如图5所示。
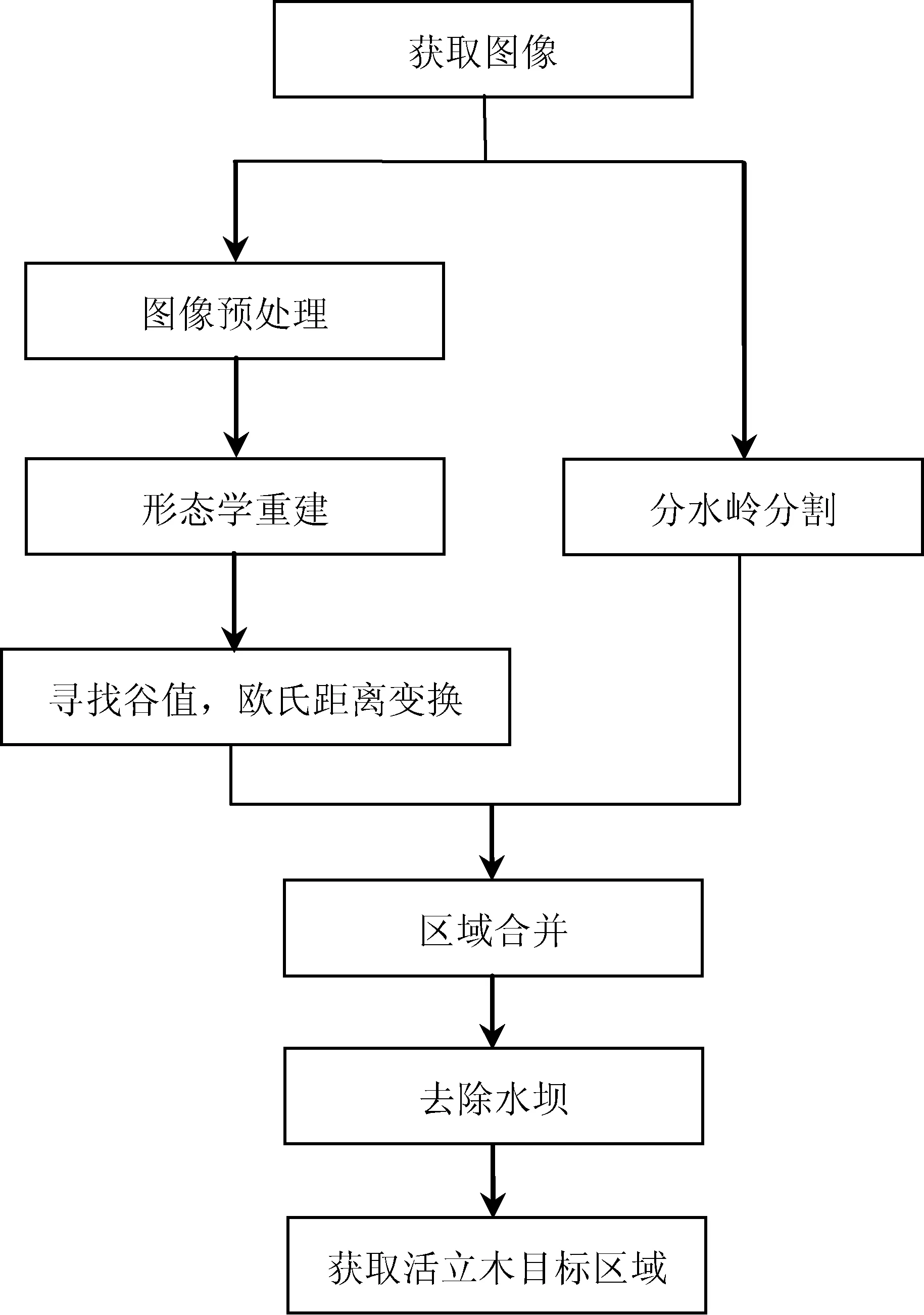
图5 算法流程图
算法关键步骤:
步骤1对原图像进行预处理并将原图像转换为灰度图像。
步骤2使用形态学重建技术区分前景与背景对象,并寻找局部最大值与进行欧式距离变换。
步骤3分水岭分割图像。
步骤4标注分割图像的区域,通过计算的每个区域的平均灰度与阈值比较,进行区域的合并,阈值设为图像的平均灰度值。
步骤5使用形态学的开启与闭合操作消除水坝,最终获取活立木的目标区域。
4 实验结果与分析
本文对类似图1的10幅900×650像素的活立木图像进行分割,通过错误分割率来检测本文算法的可靠性。人工分割活立木像素数是指通过Photoshop软件对活立木目标区域进行提取而后计算出的像素数目;错误分割数为人工分割活立木像素数与本文算法正确提取的像素数的差值;错分数是错误分割数除以人工分割活立木的像素数,统计结果如表2所示,错分率为11.58%,即正确分割率为88.42%。本文算法图像与人工分割图像分别如图6(a)和图6(b)。

表2 活立木分割数据
从表中可以看出,针对不同的相类似的图像,得到的结果不尽相同。最高的错分率可以达到17.94%,而最小的错分率只有5.13%。对于2号、7号和9号等活立木图像,其错分率均达到15%以上,最主要的原因有两个:一是其活立木图像的前景对象与背景对象在分界线附近的灰度值很接近;二是活立木图像的前景对象中混杂着灰度值较低的像素,尤其在分界处存在大量灰度较低的像素,其与背景对象难以区别。如4号与7号等活立木图像,其活立木目标区域占图像的比例近似,但是分割结果却有很大差别,其原因也在于此。对于1号、4号等活立木图像,其前景对象与背景对象在分界处灰度值有较大差别,前景对象中掺杂的灰度值较低的像素少且分散,并且基本没有分布在边界处,所以其分割效果较好。
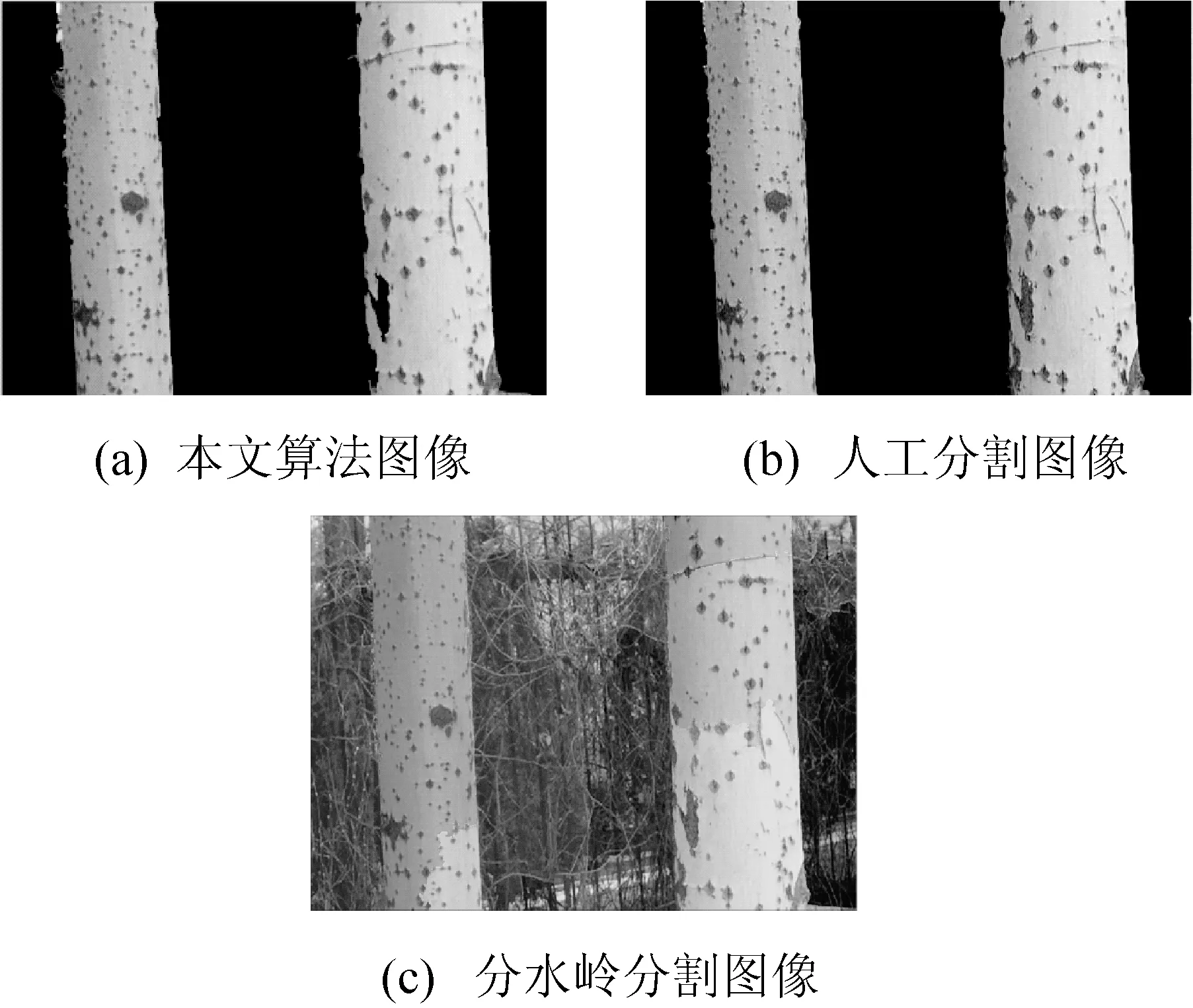
图6 分割结果的比较
由6(a)和图6(b),本文算法分割的图像与人工分割的图像相比较,其分割的效果大致相同,在局部出现很小的误差,达到减小过分割以及正确提取目标区域的要求。而传统分水岭算法将前景图像、背景图像分割为多个部分,不能正确地将活立木分割出来。
5 结 语
传统的分水岭算法,其过分割现象严重,对目标区域的提取非常困难,甚至不能进行特征区域的辨别。解决分水岭过分割的方法分为基于标记提取的前处理以及利用对分割图像进行合并的后处理两类。针对本文中提取活立木中高灰度值中掺杂着聚集的低灰度值区域,并且背景中灰度值变化复杂,尤其在前景对象与背景对象的分界处,前景对象的灰度值与背景对象的灰度值之间的关系比较复杂,对提取目标区域有很大的影响。如果单纯利用前处理或后处理,其最终分割的效果不佳。
虽然本文算法较好地解决了活立木图像的过分割问题,但图像消除过分割的效果依赖于形态学重建技术中对结构元素的参数选取。对结构元素选取较小的参数,能够较好地保证图像轮廓的信息,但是对前景对象或是背景图像内部局部极值的消除效果不好,对分水岭分割中过分割现象的抑制作用极大削弱。对结构元素选取较大的参数,虽然能够对图像局部极值有较好的消除效果,但是对于图像轮廓的定位就变得不准确,可能造成图像分割的错误。
本文针对活立木的过分割问题,分析了活立木的形态、纹理与色彩特征之间的规律,先探索灰度图像的分割,进而研究彩色图像的分割算法,提出了一种基于分水岭算法的活立木图像特征提取算法。本文综合利用了分水岭算法基于标记提取的前处理以及对分割图像进行合并的后处理,较好地抑制了活立木图像的过分割问题。通过对10幅类似的活立木图像的测试,传统分水岭算法的运行时间为2.142 0 s,本文算法平均运行时间为2.721 9 s。虽然本文算法在运行速度上较之慢0.579 9 s,但是传统分水岭算法不能将图像正确地分割出来,而本文分割正确率达到88.42%,达到预期的目标,为研制智能林木综合采育机提供理论依据。
[1] φstensvik T, Veiersted K B, Cuchet E, et al. A search for risk factors of upper extremity disorders among forest machine operators: A comparison between France and Norway[J]. International Journal of Industrial Ergonomics, 2008, 38(11-12):1017-1027.
[2] Vestlund K, Hellström T. Requirements and system design for a robot performing selective cleaning in young forest stands[J]. Journal of Terramechanics, 2006,43(4):505-525.
[3] Legües A D, Ferland J A, Ribeiro C C, et al. A tabu search approach for solving a difficult forest harvesting machine location problem[J]. European Journal of Operational Research, 2007,179(3):788-805.
[4] 阚江明.基于计算机视觉的活立木三维重建方法[D].北京:北京林业大学,2008.
[5] 阚江明,李文彬,孙仁山.基于计算机视觉的立木枝干直径自动测量方法[J].北京林业大学学报,2007,29(4):5-9.
[6] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报, 2014,3(7):0715002.
[7] Wang Yutan, Li Wenbin, Pang Shuai, et al. Segmentation method of lingwu long jujubes based on L*a*b* color space[J]. Telkomnika-Indonesian Journal of Electrical Engineering, 2013,11(9):5344-5351.
[8] Wang Yutan, Kang Jiangming, Li Wenbin, et al. Image segmentation and maturity recognition algorithm based on color features of Lingwu long jujube[J]. Advance Journal of Food Science and Technology, 2013,5(12):1625-1631.
[9] 伍艳莲,赵力,姜海燕,等.基于改进均值漂移算法的绿色作物图像分割方法[J].农业工程学报, 2014,30(24):161-167.
[10] 杨先凤,樊勇,彭博,等.去除高斯噪声的快速分区域去噪算法[J].计算机工程与设计, 2014,35(4):1341-1346.
[11] 许圣雷.基于均匀空间色差度量的彩色图像椒盐噪声滤波算法研究[D].昆明:昆明理工大学,2015.
[12] 吴一全,王凯,戴一冕.基于非局部均值和SUSAN算子的混合噪声滤除[J].光子学报, 2015,44(9):0910001.
[13] 杨杰.数字图像处理及MATLAB实现[M].北京:电子工业出版社,2014.
RESEARCHONTHEMETHODOFSEGMENTATIONONCOLORIMAGEOFSTANDINGTREES
Dai Yingpeng Wang Yutan*Xue Junrui Gao Yaoyao Liu Bohan Ma Chenghao
(SchoolofMechanicalEngineering,NingxiaUniversity,Yingchuan750021,Ningxia,China)
In order to avoid the defects of image segmentation and improve the accuracy of machine identification, a new algorithm of segmentation image based on watershed algorithm is proposed. By analyzing the causes of the defect in the actual segmentation, the method of combining pre-treatment and post-processing was used to overcome the shortcomings of over-division. Firstly, the image pre-processing was carried out by using the morphological reconstruction technique. Then the watershed algorithm was used to segment the image, and the image was marked by the marker object method. Finally, the color information of the target object was used to merge the area and removed the redundant dam, and finally the segmented image was obtained. According to the method of artificial segmentation, the proposed algorithm based on watershed algorithm can effectively extracted the target area of living wood, and the correct rate of segmentation was 88.42%.
Image processing Feature extraction Standing tree Watered algorithm
2017-03-07。宁夏大学自然科学研究基金(ZR1409)。代英鹏,硕士生,主研领域:机械制造及其自动化。王昱潭,副教授。薛君蕊,本科生。高垚垚,硕士生。刘博瀚,硕士生。马程浩,硕士生。
TP391
A
10.3969/j.issn.1000-386x.2017.12.043
