电动静液压作动器主动悬架力跟踪控制研究
2017-12-29寇发荣杜嘉峰许家楠何凌兰
寇发荣 王 哲 杜嘉峰 李 冬 许家楠 何凌兰
西安科技大学机械工程学院,西安,710054
电动静液压作动器主动悬架力跟踪控制研究
寇发荣 王 哲 杜嘉峰 李 冬 许家楠 何凌兰
西安科技大学机械工程学院,西安,710054
建立了1/4主动悬架和EHA主动悬架系统的数学模型,分析了EHA作动器中的无刷直流电机对该系统的影响。提出了一种基于主环LQG理想力控制器和内环电机电流控制器组成的力跟踪控制策略,设计了EHA主动悬架硬件控制器,并进行了仿真和台架试验。结果表明,力跟踪控制能够使电机输出的实际主动力接近理想主动力,改善了EHA主动悬架的动态特性,验证了所设计的控制策略和硬件控制器的可行性。
电动静液压作动器;主动悬架;力跟踪控制;LQG控制
0 引言
汽车悬架分为被动悬架、半主动悬架和主动悬架。主动悬架的减振效果最好,引起了国内外的广泛关注[1-4]。
近年来,国内外学者对主动悬架所用的控制方法进行了大量的研究,目前已提出了多种理论完备、可实际运用的主动悬架控制算法,如天棚控制[5]、加速度阻尼控制[6]、二次型最优控制[7]、滑模控制[8]等,但是对提供主动力的执行元件研究却很少。主动悬架的执行元件有旋转电机、气泵等,目前研究大多将作动器中的执行元件理想化,但由于执行元件动力学较为复杂,其与悬架系统的相互作用关系需要进行深入分析。
本文针对文献[9]设计的电动静液压作动器(electro-hydrostatic actuator, EHA)车辆主动悬架结构,通过建立EHA主动悬架系统的数学模型,分析作动器的核心执行元件(无刷直流电机)对EHA主动悬架系统的影响,并针对无刷直流电机的特性,设计一种力跟踪控制策略和基于TMS320F288335处理器的EHA主动悬架硬件控制器,通过仿真分析和台架试验,验证力跟踪控制策略对抑制振动、提高车辆平顺性的有效性。
1 EHA主动悬架结构与原理
EHA主动悬架的基本结构如图1所示。
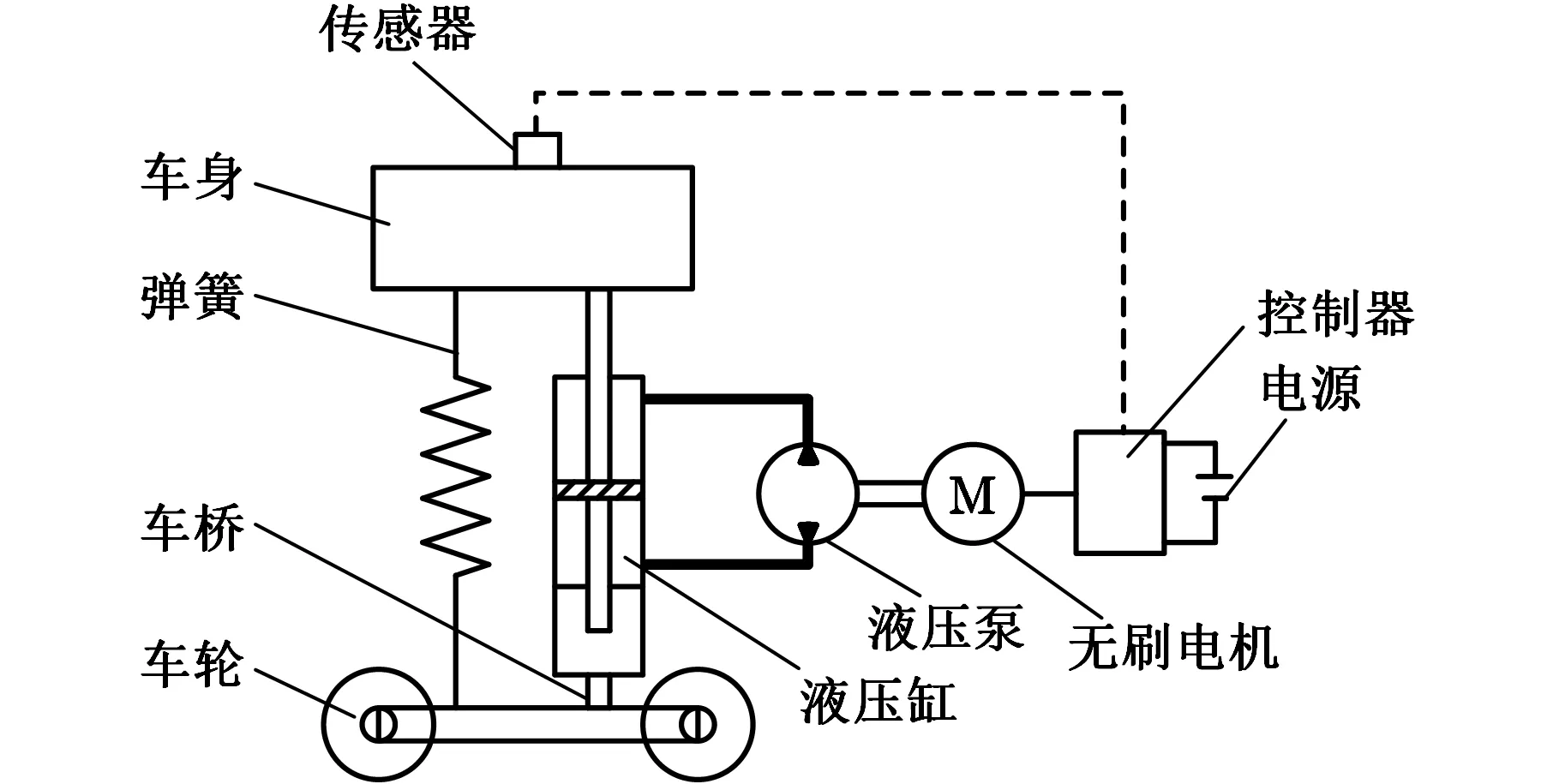
图1 EHA主动悬架结构原理图Fig.1 Schematic diagram of EHA active suspension structure
车辆EHA主动悬架系统主要由螺旋弹簧和EHA作动器组成。EHA作动器由液压缸、液压泵、电源、控制器、无刷直流电机以及传感器等组成。EHA主动悬架根据传感器信号的变化,通过最优控制策略得出悬架所需的理想主动力,控制器通过调节无刷直流电机电磁转矩的大小和方向,使其带动同轴连接的液压泵转动,改变液压缸中导杆所提供的主动力,减小车身振动,提高汽车平顺性。
2 EHA主动悬架动力学模型
2.1 1/4车辆二自由度悬架模型
车辆二自由度悬架动力学模型如图2所示。
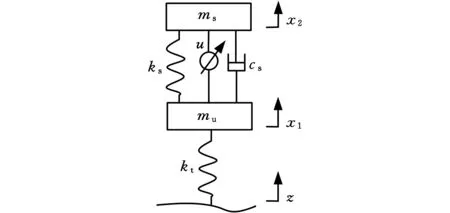
图2 车辆二自由度悬架模型Fig.2 Vehicle 2 degree of freedom suspension model
根据牛顿定律,分别对簧载质量和非簧载质量进行力学分析,得到其运动方程如下:
(1)
选取输入与输出变量:

根据所设定的输入变量与输出变量,可以得到汽车的二自由度悬架状态方程如下:
(2)
式中,A为状态矩阵;B为输入矩阵;C为输出矩阵;D为传递矩阵;u为作动器输出力矩阵。
2.2 EHA主动悬架系统数学模型建立
2.2.1无刷直流电机数学模型
EHA主动悬架所需要的主动力由无刷直流电机输出的负载转矩所提供,负载转矩与电磁转矩和电磁功率有关。无刷直流电机的电磁功率等于三相绕组的反电动势与相电流乘积之和[10],即
Pe=eaia+ebib+ecic
(3)
式中,Pe为电磁功率;ea、eb、ec为电机三相反电动势;ia、ib、ic为电机三相电流。
不计转子的机械损耗和杂散损耗,电磁功率全部转化为电磁转矩,可得
Pe=TeΩ
(4)
式中,Te为电磁转矩;Ω为电机机械角速度。
由式(3)和式(4)可得到电机的电磁转矩方程为
(5)
当无刷直流电机运行在120°导通工作方式下,不考虑换相暂态过程,三相定子绕组中仅有两相流过电流,其大小相等方向相反。假设A相和B相导通,则存在eaia=ebib,ic=0。设Is为导通相相电流ix幅值,Es为导通相反电动势ex的幅值,则式(4)可变换为如下表达式:
Pe=eaia+ebib+ecic=2EsIs
(6)
将式(6)代入式(5)得到电磁转矩的表达式为

(7)
根据电机运动方程得到负载转矩表达式为

(8)
式中,TL为电机负载转矩;JR为转子转动惯量;B为黏滞摩擦系数。
2.2.2液压系统数学模型
由EHA主动悬架结构可知,液压马达与电机通过联轴器相连,所以它们的角速度和转矩都相等。理想状态下,电机输出的电磁功率等于液压马达的输入功率,此时液压马达作为液压泵使用,液压泵输入功率为
Pbin=2πnbTb
(9)
式中,Pbin为输入功率;Tb为输入转矩;nb为转速。
液压泵的输出功率为
Pbout=pqV=pnbV
(10)
式中,p系统工作压力;qV为实际流量;V为泵的排量。
设液压泵工作过程中总效率为η,则可得出
Pbinη=Pbout
(11)
将式(10)、式(11)代入式(9)可得

(12)
在系统工作压力p的环境下,可以得到液压缸中产生的主动力为
F=Ap
(13)
式中,F为主动控制输出力;A为液压缸有效面积。
由于液压泵与电机通过联轴器相连,所以可忽略传动效率,即液压泵输入转矩Tb与电机的负载转矩TL相等。联合式(7)、式(8)、式(12)、式(13)可得
(14)
由式(14)可知,液压缸输出的主动力与无刷直流电机的电流、转速有关,因此对电机转速、电流进行反馈控制可以有效地对主动力进行实时跟踪控制。
3 EHA主动悬架力跟踪控制
力跟踪控制系统结构如图3所示。
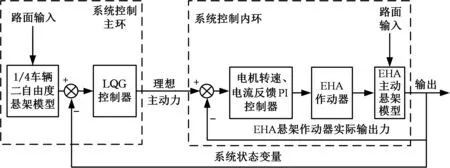
图3 力跟踪控制系统结构Fig.3 Structure of force tracking control system
根据跟踪目标的不同,力跟踪控制系统可以分为主环和内环。主环通过对EHA主动悬架系统状态变量的跟踪,利用LQG控制策略计算出该悬架系统所需的理想主动力的大小,并依据EHA主动悬架系统力特性试验得出系统主动力与电机占空比的关系,计算出此时电机的参考转速。系统内环包含电机转速、电流调节器,构成了转速、电流双闭环控制系统。在转速、电流双闭环控制系统下,无刷直流电机的响应速度得到提高,输出的负载转矩得到有效控制,使内环实际输出的主动力与主环LQG计算的理想主动力保持一致,进而实现EHA作动器实际输出的主动力对理想主动力的跟踪。
3.1 力跟踪控制主环
力跟踪控制主环采用LQG最优控制策略,其目标是计算出EHA主动悬架所需要的理想主动力的大小,使车辆获得较高的平顺性和操纵稳定性。反映在实际控制量上就是要尽可能地降低簧载质量加速度、轮胎动载荷,限制悬架动挠度的变化范围,减少悬架撞击限位块的可能性。综合考虑以上的因素,主动悬架输出调节器的性能指标函数可以写成:

(15)
式中,q1为车身加速度加权系数;q2为悬架动挠度加权系数;q3为轮胎动变形加权系数;r为控制加权系数。
上述优化指标用矩阵形式表示为
(16)
q=[q1q2q3]

(17)
式中,Q为状态变量的半正定对称加权矩阵;N为两种变量关联性的加权矩阵;R为控制变量的正定对称加权矩阵。
要使性能指标J取极小值的最优控制u*存在且唯一,即
u*=-KX=-(BTP+NT)X
(18)
PA+ATP-(PB+N)R-1(BTP+NT)+Q=0
(19)
式中,P为黎卡提矩阵方程的对称正解。
3.2 力跟踪控制内环
力跟踪内环采用无刷直流电机PI双闭环控制,目标是实现无刷直流电机实际输出的主动力对主环理想主动力的良好跟踪。反映在实际控制量上就是要控制电机的转速和母线电流的大小。这样不仅可以提高电机的响应速度,而且还可以控制电机启动瞬间转矩突增对主动悬架系统的影响。
图4为无刷电机PI双闭环控制器结构图。由主环计算出的参考转速与检测到的实际转速作为转速PI控制器的输入,计算所得的参考电流与检测的实际电流作为电流PI控制器的输入,计算得到PWM脉宽调制信号,实现了对无刷直流电机的转速、电流双闭环控制。
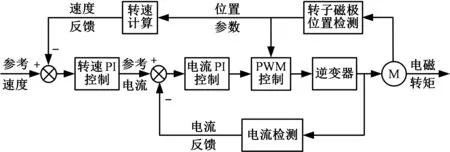
图4 内环控制结构Fig.4 Inner loop control structure
根据对系统内环特性的分析,选定PI控制器参数为:转速环比例参数Pn=0.0157,积分参数In=0.0007;电流环比例参数Pi=60.79,积分参数Ii=1.03。经过系统仿真分析,此参数能够实现EHA主动悬架系统实际输出力对理想主动力的跟踪控制,提高该悬架系统的动态性能。
4 仿真分析
利用MATLAB仿真软件分析,建立EHA主动悬架系统仿真模型,以频率为1 Hz、幅值为10 mm的正弦激励以及车速为40 km/h、C级路面作为输入工况进行分析。EHA主动悬架参数为:kt=117 kN/m,ks=13 kN/m,mu=40 kg,ms=250 kg,cs=1000 N·s/m。 EHA作动器的参数为:活塞有效面积A=7.657×10-4m2,液压马达排量qV=0.063×10-6m3/rad,电机额定电压48 V,额定功率500 W,电机电磁转矩系数K=0.069 N·m/A,电机电枢电感系数L=8.5×10-3H,电机绕组电阻R=1.8 Ω。
在正弦路面激励和随机路面激励下,把没有考虑执行元件对系统影响的LQG控制(无内环)和力跟踪控制下的主动力的跟踪控制效果、车身加速度、悬架动挠度、轮胎动载荷与被动悬架进行比较。仿真结果如图5~图9所示。
图5是EHA主动悬架系统在正弦和随机路面激励下,力跟踪控制和LQG控制对主动力的跟踪曲线。在无内环的LQG控制下,由于没有考虑EHA作动器中无刷直流电机的特性,实际输出主动力跟踪效果差且波动大;在力跟踪控制下,加入内环电机转速、电流反馈控制,主动力跟踪效果良好。
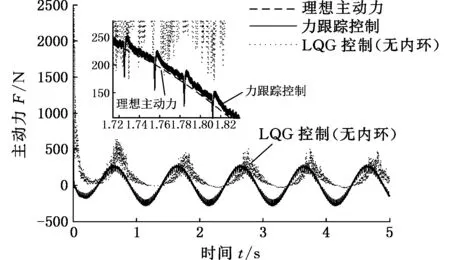
(a)正弦路面激励
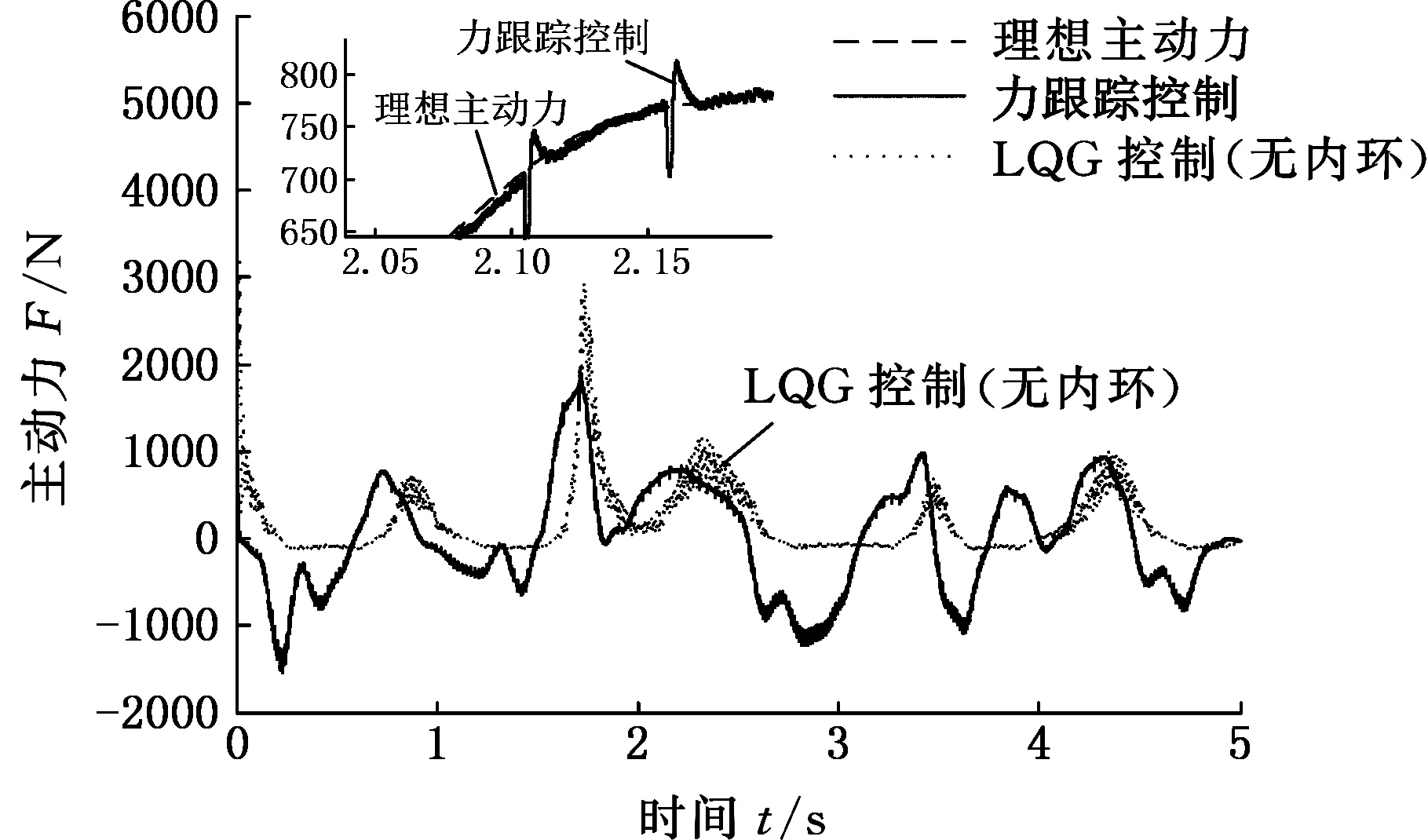
(b)随机路面激励图5 力跟踪曲线Fig.5 Force tracking curve
针对主动力的跟踪曲线,计算了力跟踪控制策略的实际输出主动力与理想主动力的绝对跟踪误差e*。绝对跟踪误差曲线如图6所示,可以看出在力跟踪控制下,系统启动时的电机转矩波动减小了。
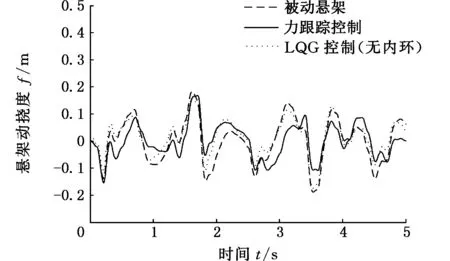
由图5~图9及表1可知,在正弦和随机路面的激励下, LQG控制(无内环)没有考虑无刷直流电机的启动特性,在EHA主动悬架初始运行时产生较大振动,初始减振效果不如被动悬架;采用力跟踪控制策略,能有效减小电机启动时的电磁转矩波动造成的振动,并能实时控制电机电磁转矩的输出,提高EHA主动悬架的动态特性,EHA主动悬架在力跟踪控制策略下与被动悬架相比,能够提高车辆平顺性,其簧载质量加速度减小53.9%,悬架动挠度减小38.7%,轮胎动载荷减小50.97%。
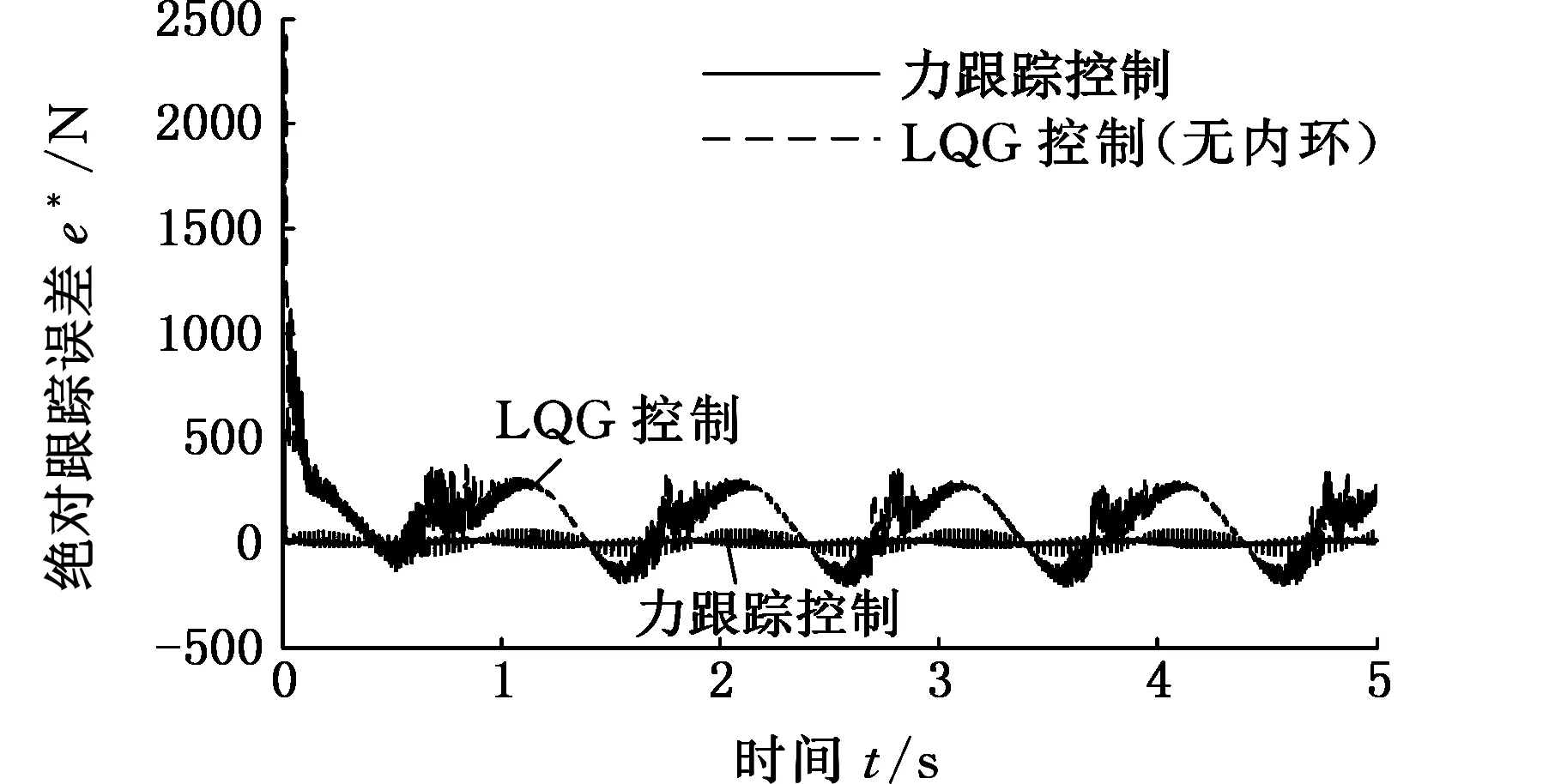
(a)正弦路面激励
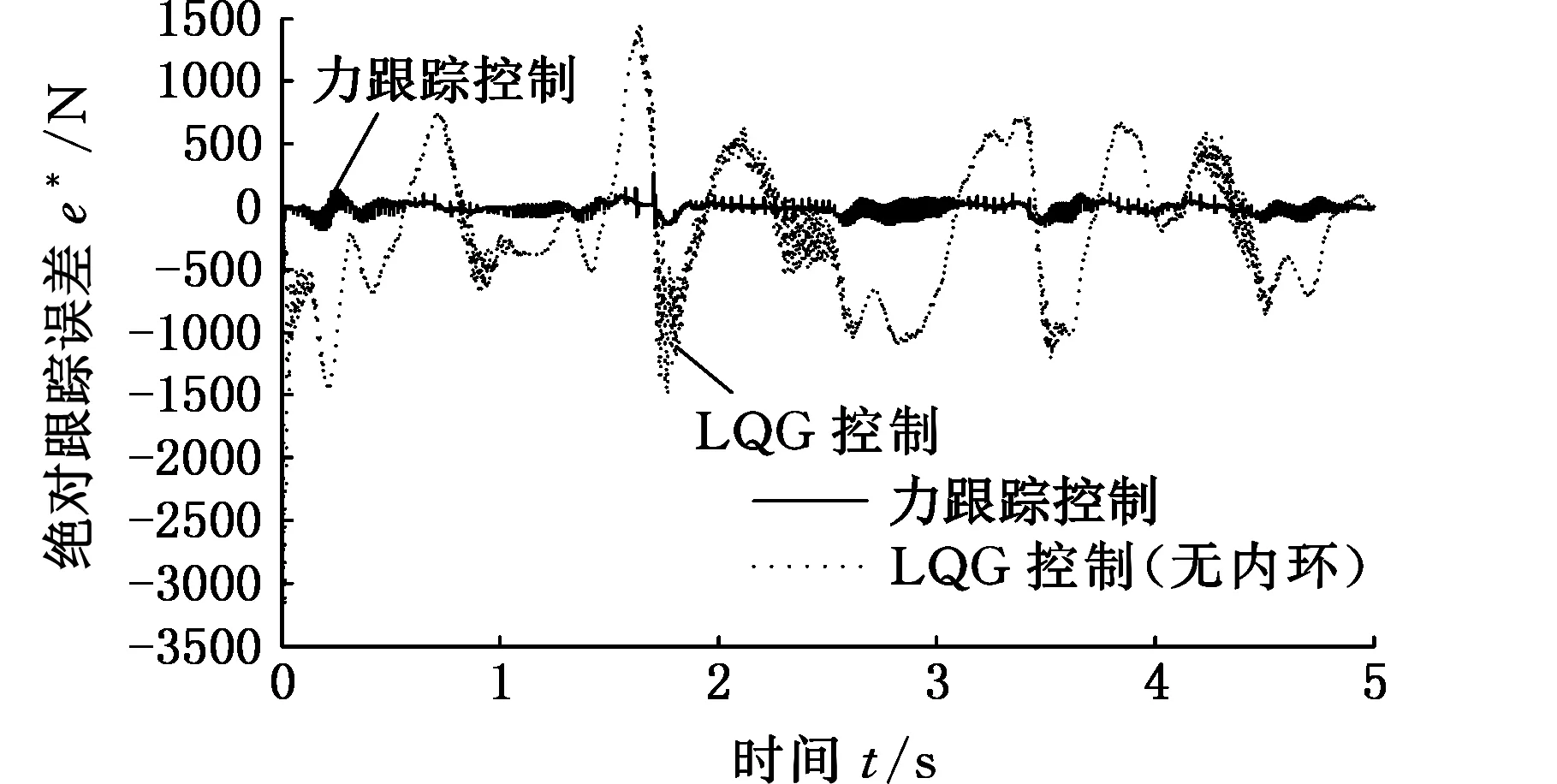
(b)随机路面激励图6 绝对跟踪误差Fig.6 Absolute tracking error
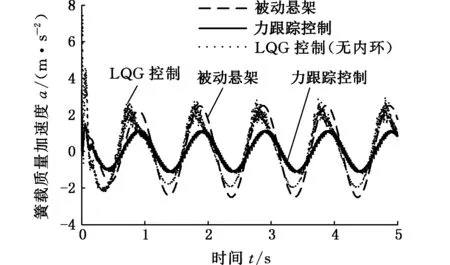
(a)正弦路面激励
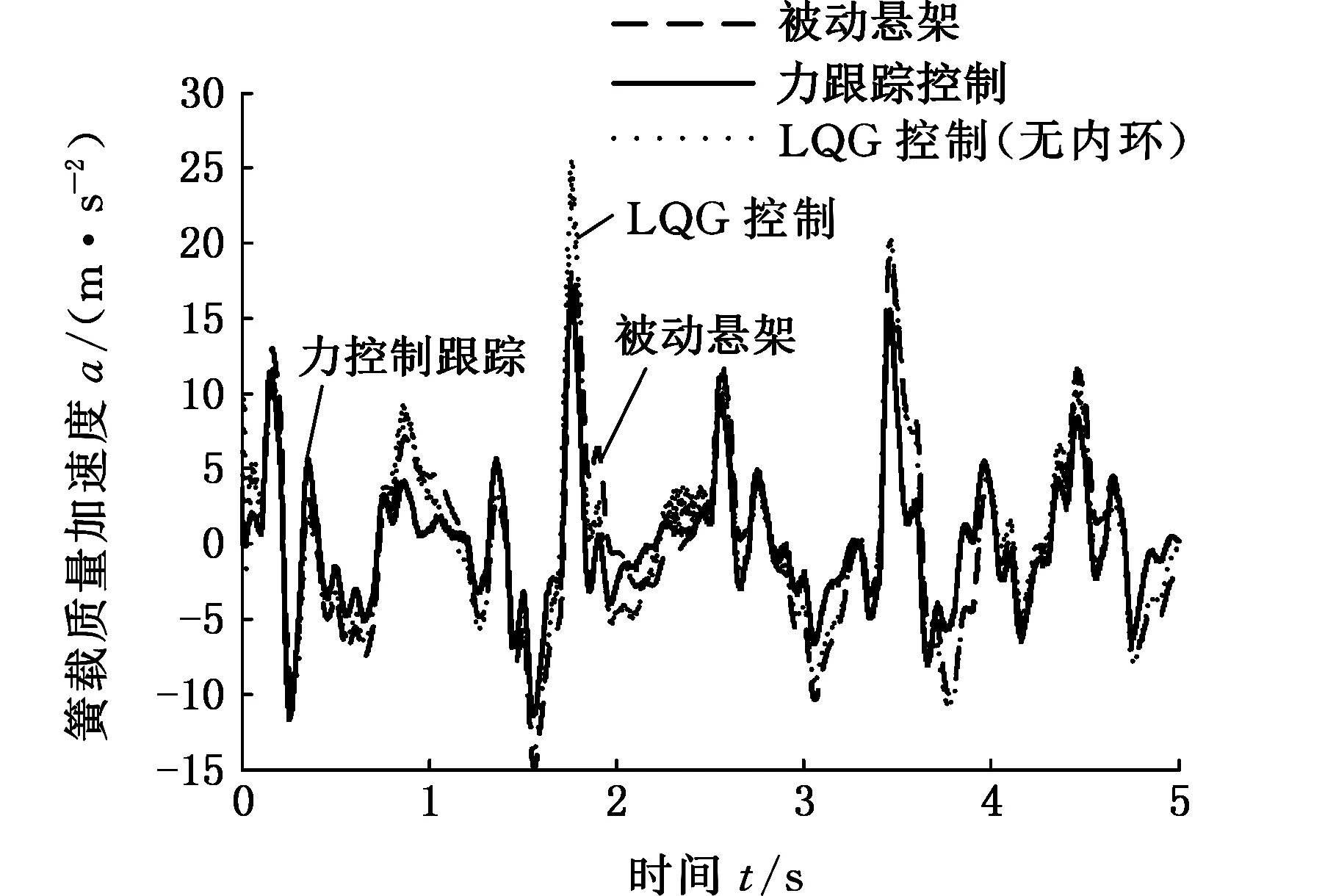
(b)随机路面激励图7 簧载质量加速度Fig.7 Sprung mass acceleration
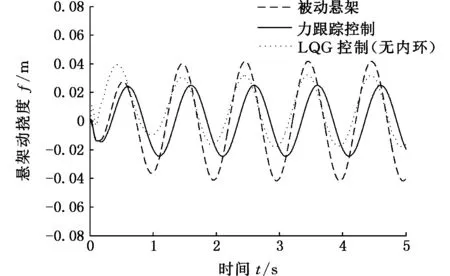
(a)正弦路面激励
(b)随机路面激励图8 悬架动挠度Fig.8 Suspension dynamic deflection
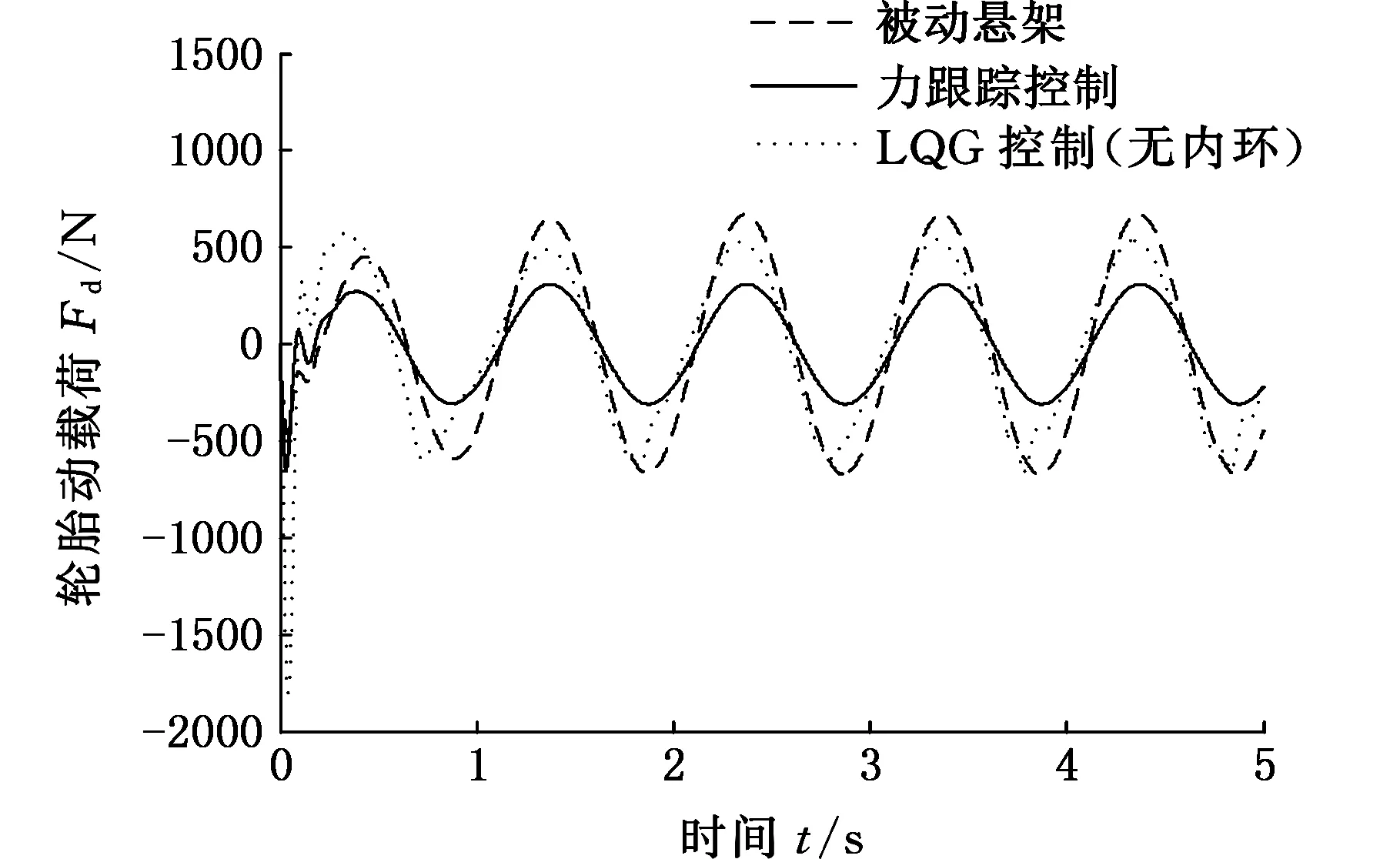
(a)正弦路面激励
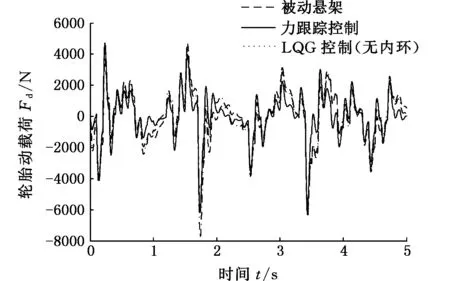
(b)随机路面激励图9 轮胎动载荷Fig.9 Tire dynamic load
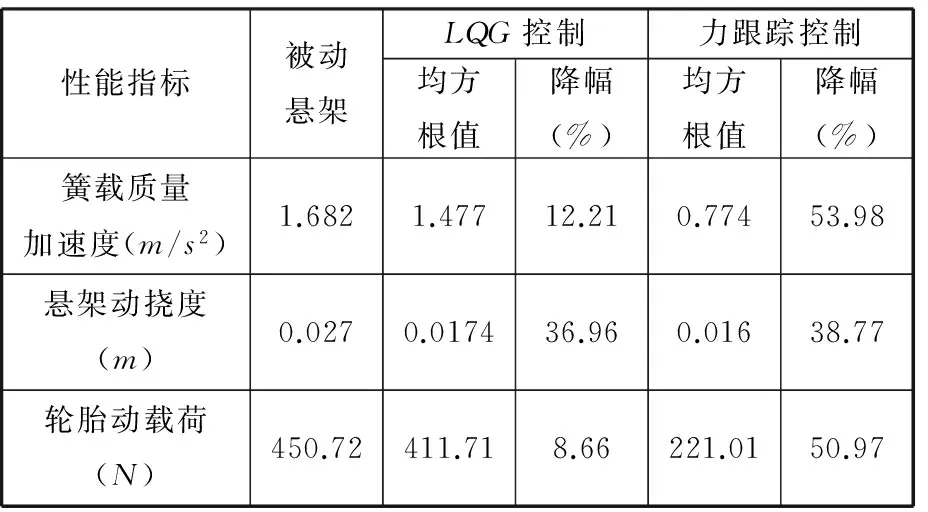
性能指标被动悬架LQG控制力跟踪控制均方根值降幅(%)均方根值降幅(%)簧载质量加速度(m/s2)1.6821.47712.210.77453.98悬架动挠度(m)0.0270.017436.960.01638.77轮胎动载荷(N)450.72411.718.66221.0150.97
5 试验分析
5.1 控制系统硬件设计
EHA主动悬架控制系统采用TI公司C2000系列的TMS320F28335处理器作为控制核心。控制系统主要由传感器、电源电路、传感器信号处理电路、TMS320F28335最小系统、无刷直流电机驱动放大电路、电机绕组电流采样电路组成。图10为控制系统结构图。
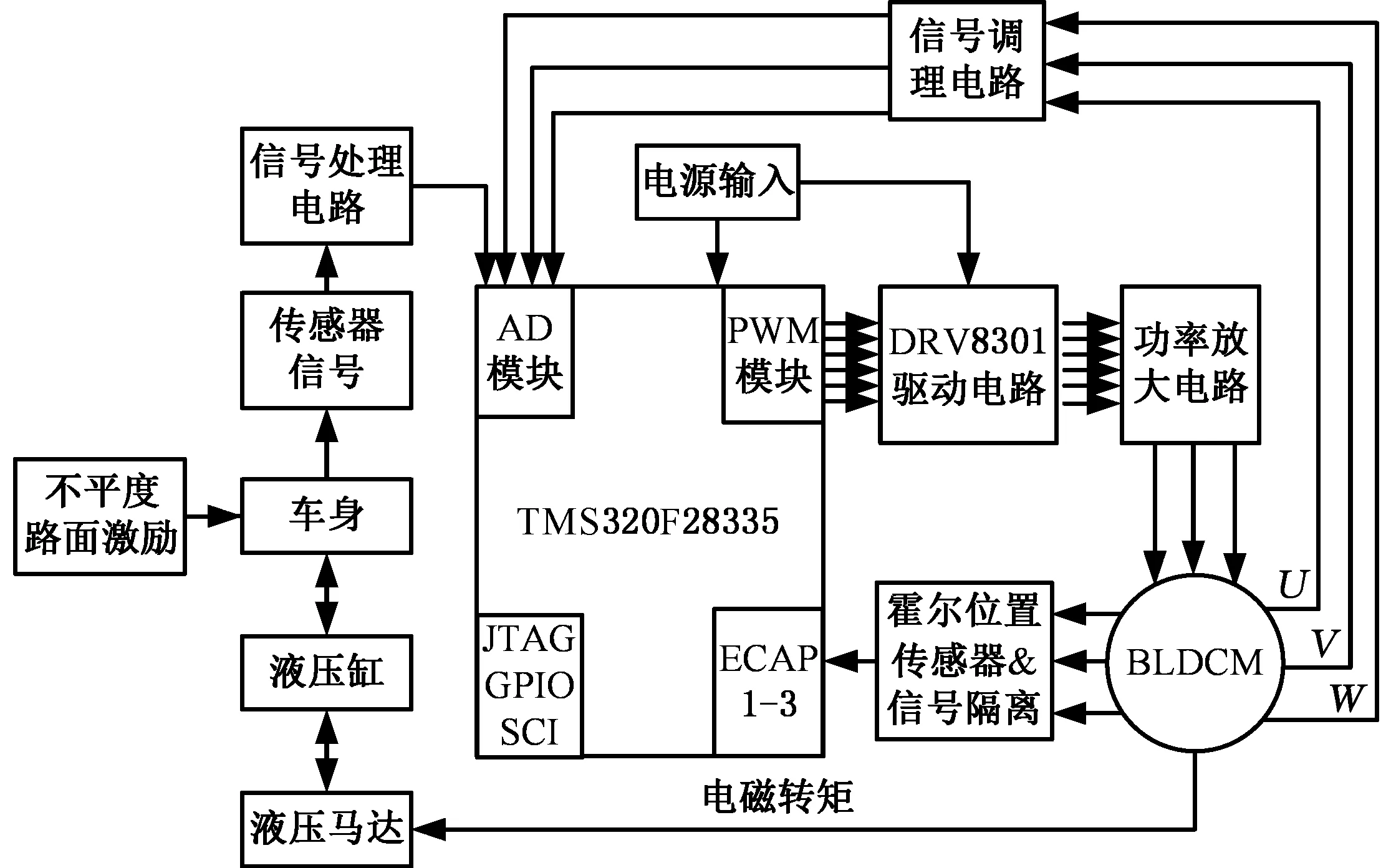
图10 控制系统硬件结构Fig.10 Hardware structure of control system
5.2 试验方案
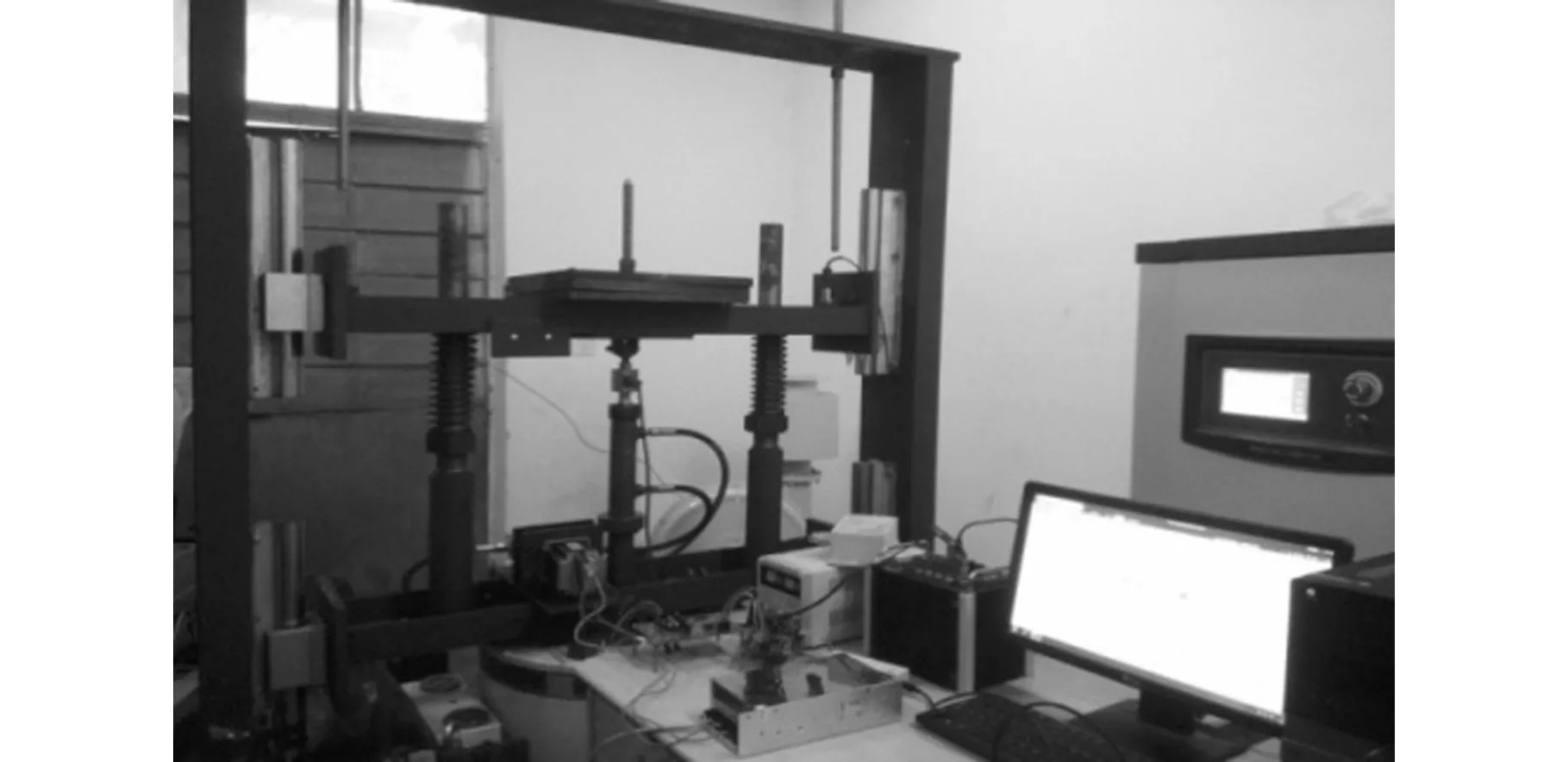
图11 EHA台架试验系统Fig.11 The EHA bench test system
利用EHA主动悬架振动试验系统,对力跟踪控制策略进行试验研究。EHA台架试验系统如图11所示。该系统主要由电磁振动台、上下横梁、螺旋弹簧、导向机构、滑块导轨支撑机构、DSP控制器、电机驱动电路、数据采集与处理系统等组成。其中,在上横梁加载配重块模拟簧载质量,EHA作动器、液压缸、下横梁模拟非簧载质量,并在上横梁处安装加速度传感器用以测量簧载质量加速度。试验中采用东华测试公司生产的DH186型加速度传感器对簧载质量加速度进行采集。
为了验证EHA主动悬架力跟踪控制效果,设定输入位移为10 mm,对不同频率正弦激励和随机路谱输入下EHA主动悬架和被动悬架的控制效果进行台架试验。
5.3 试验结果
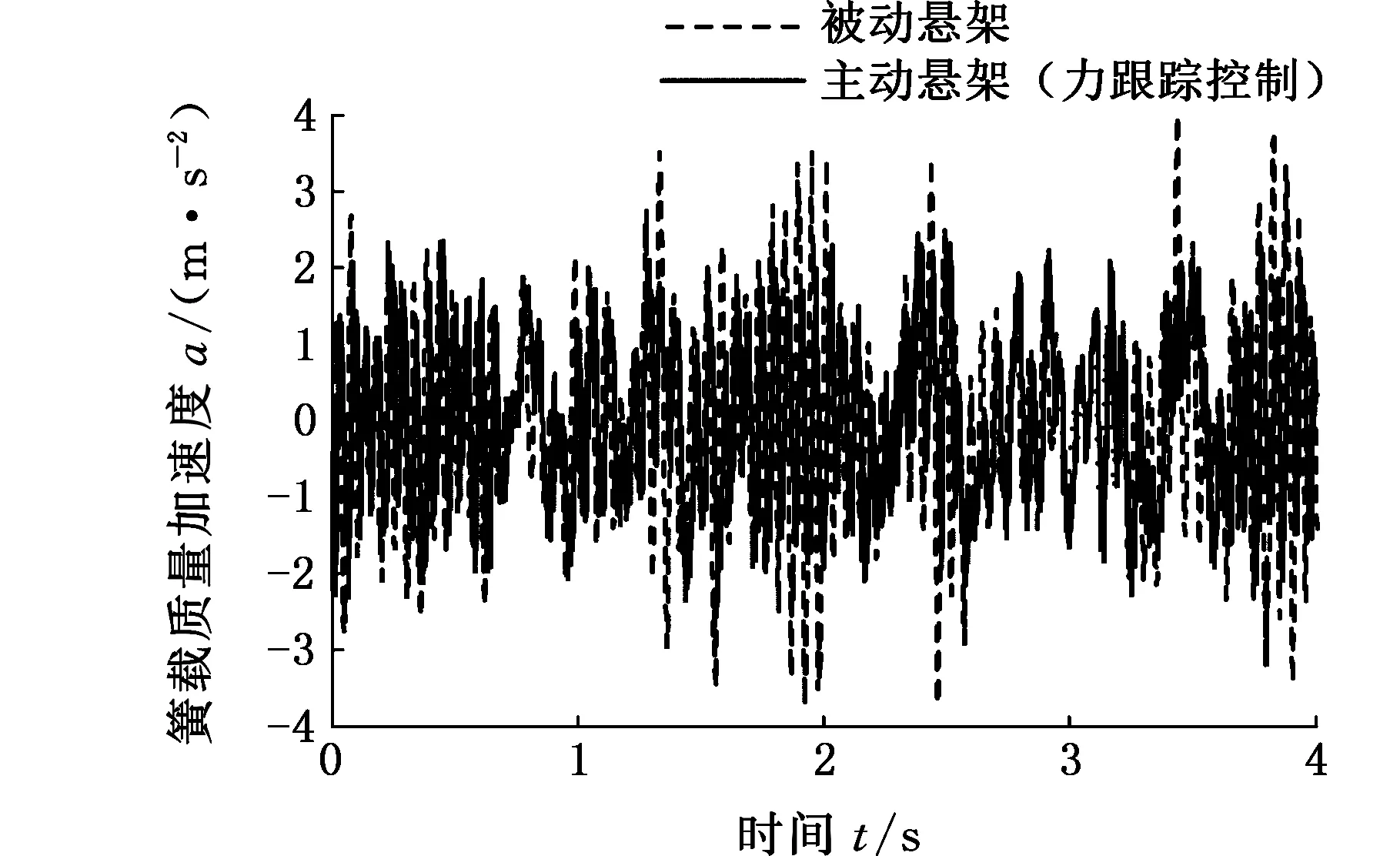
由于实验条件所限,只开展了悬架动态相应性能测试,没能对非簧载质量加速度进行数据采集,仅对力跟踪控制策略下的EHA主动悬架和被动悬架的簧载质量加速度进行对比。图12为输入频率为3 Hz的正弦激振力的对比试验结果。图13为输入频率为5 Hz的正弦激振力的对比试验结果。图14为随机路谱输入下的试验结果。
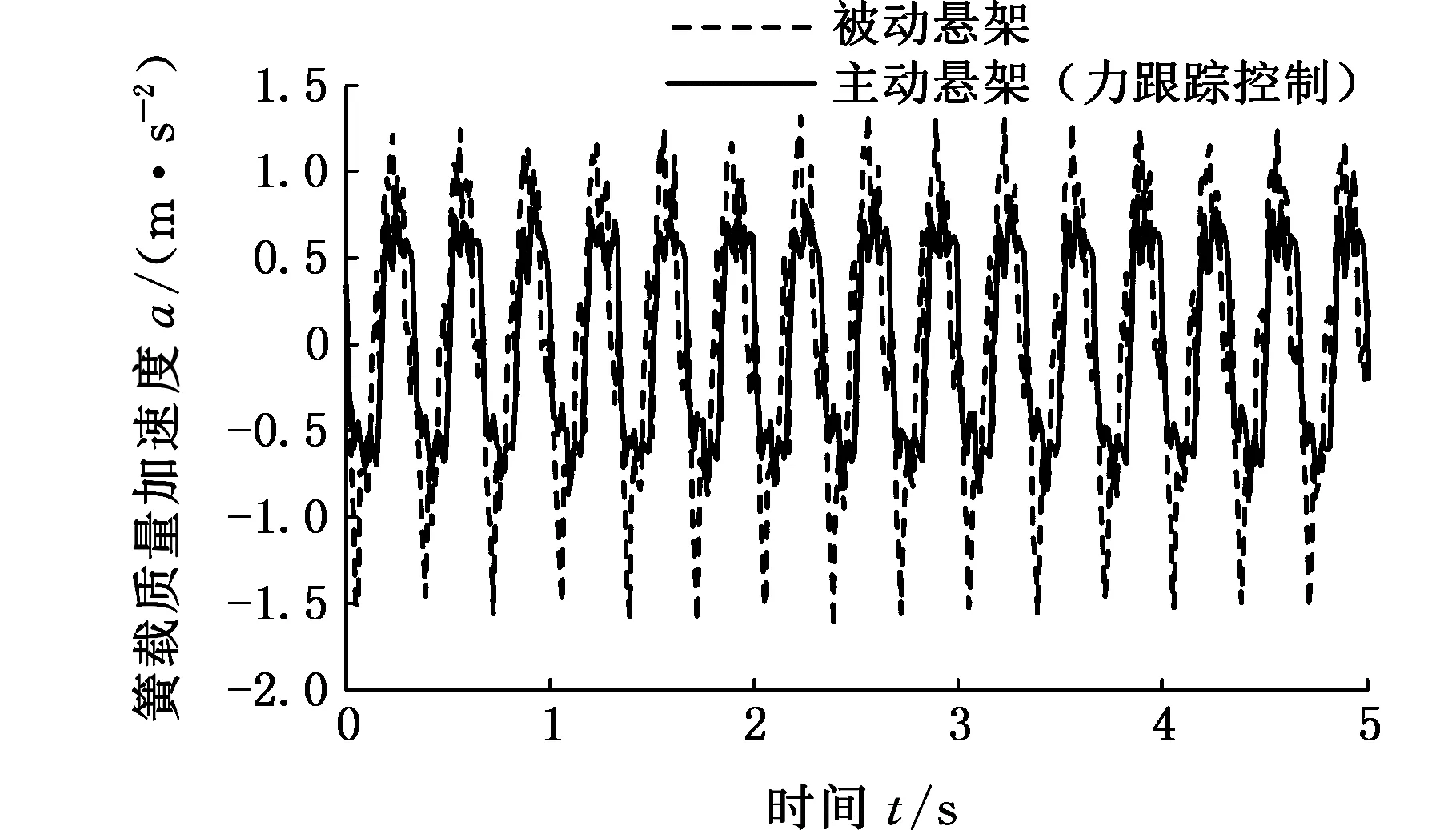
(a)簧载质量加速度响应
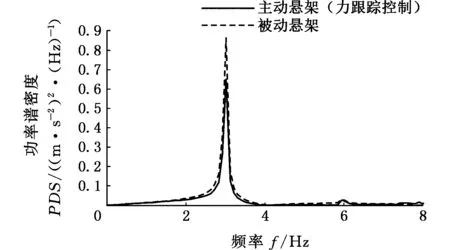
(b)簧载质量加速度功率谱密度图12 3 Hz正弦路面输入下响应Fig.12 Response to 3 Hz sinusoidal input
由图12~图14及表2可以看出,在不同频率的正弦激励和随机路谱输入下。力跟踪控制下的EHA主动悬架的簧载质量加速度比被动悬架的簧载质量加速度小,而且在EHA主动悬架启动时,簧载质量加速度未发生明显变化,说明力跟踪控制策略不仅抑制了振动,提高了EHA主动悬架的动态特性,而且有效地控制了无刷直流电机启动转矩对EHA主动悬架的影响。
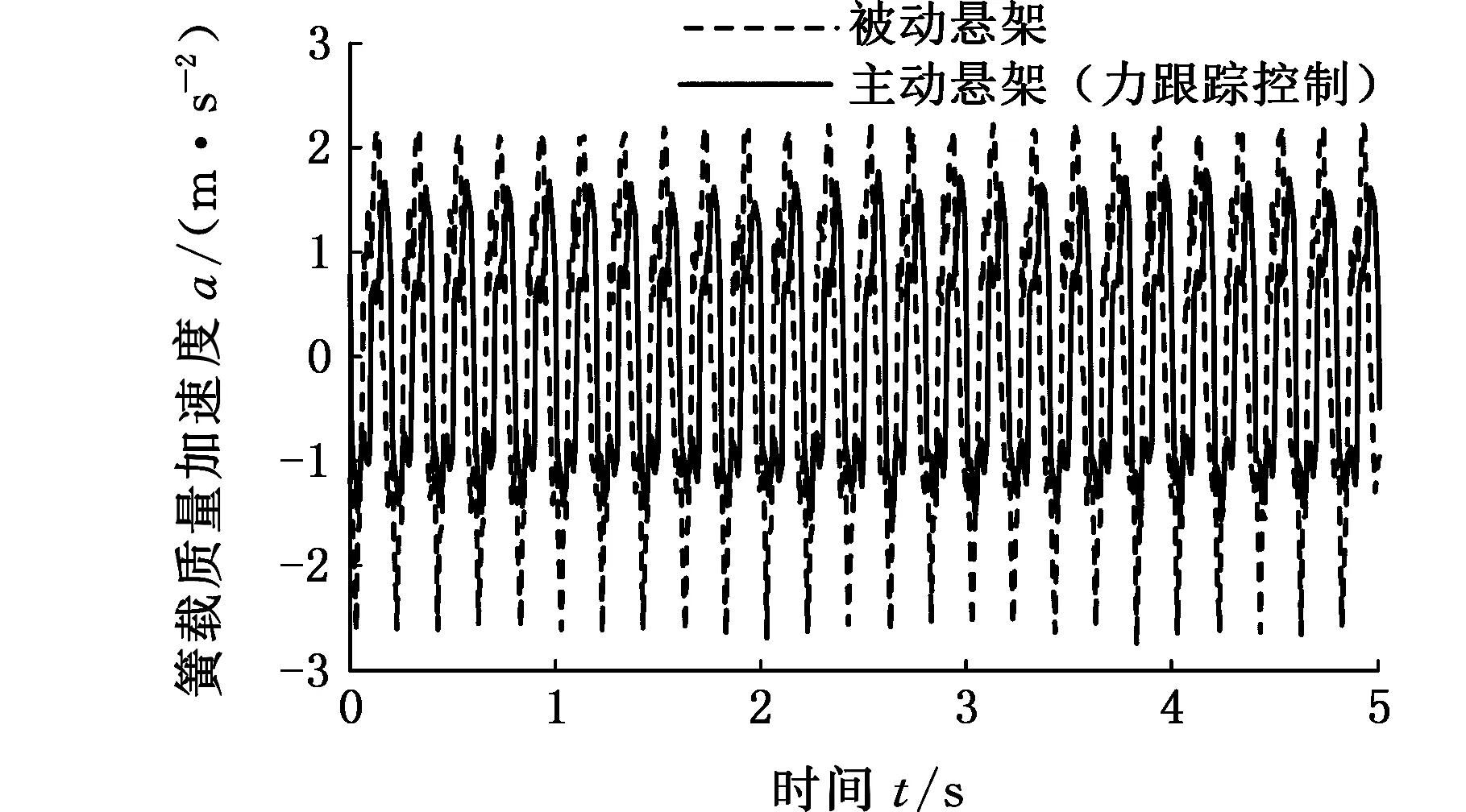
(a)簧载质量加速度响应
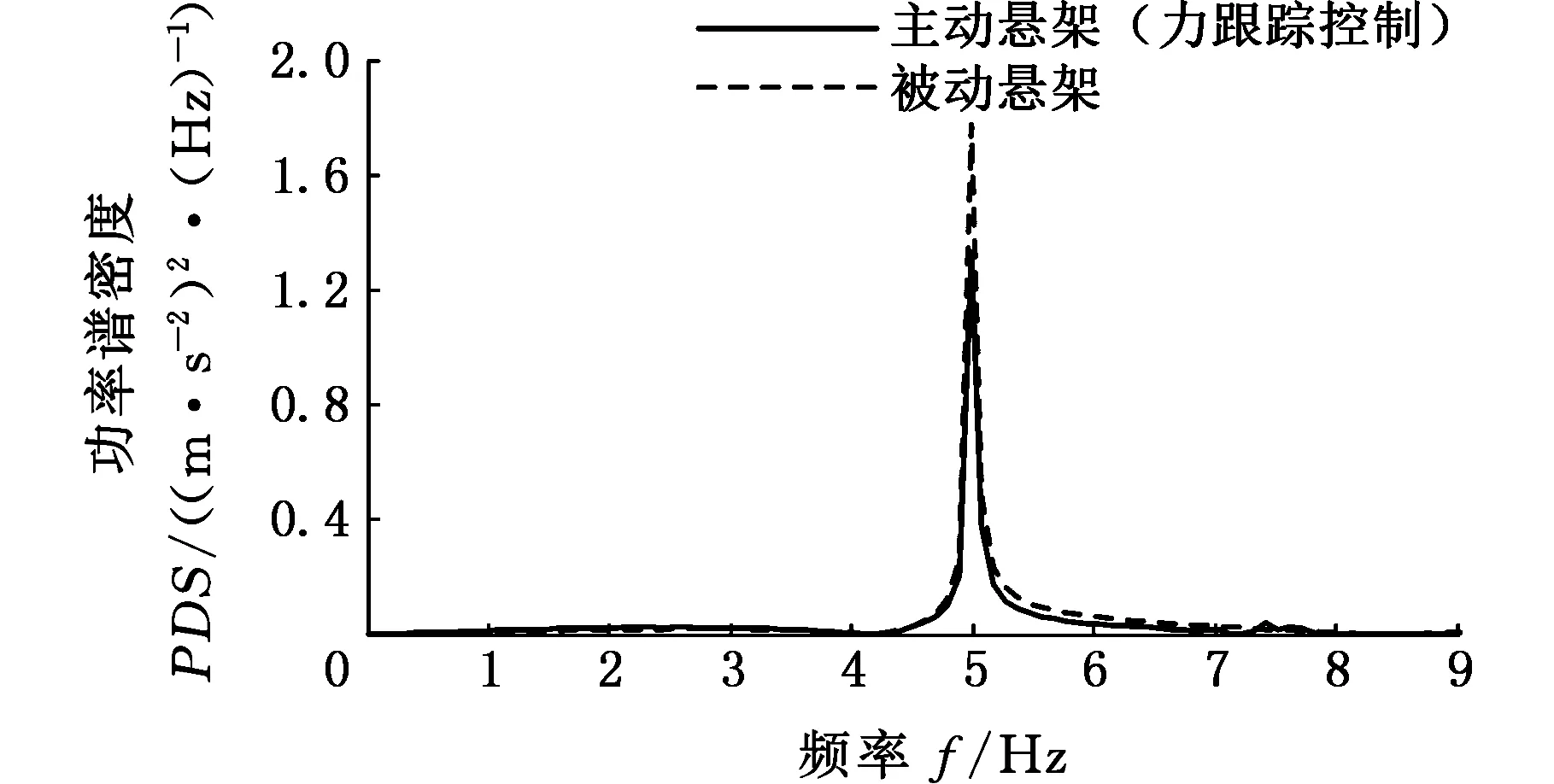
(b)簧载质量加速度功率谱密度图13 5 Hz正弦路面输入下响应Fig.13 Response to 5 Hz sinusoidal input
(a)簧载质量加速度响应
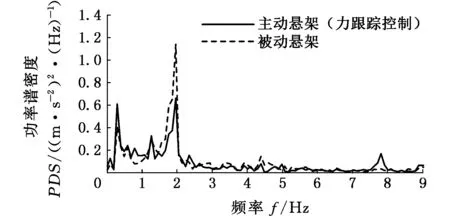
(b)簧载质量加速度功率谱密度图14 随机路面输入下响应Fig.14 Response under random road input

3Hz5Hz随机路谱被动悬架0.931.411.35主动悬架0.741.060.98
6 结论
(1)通过建立EHA主动悬架系统的数学模型,分析了悬架所需主动力与无刷直流电机的关系,得到了其主动力与无刷直流电机的转速、电流的关系。
(2)根据悬架主动力与无刷直流电机的关系,提出了一种力跟踪控制策略。建立了该悬架系统的仿真模型,通过仿真分析,力跟踪控制策略有效控制了无刷直流电机启动转矩给系统带来的振动,提高了EHA主动悬架系统的动态特性。
(3)设计了基于TMS320F28335处理器的主动悬架控制系统硬件平台,并对力跟踪控制效果进行了台架试验,结果验证了力跟踪控制策略的有效性。
[1] 宋作军. 汽车半主动悬架的非线性动力学分析[J]. 中国机械工程, 2016, 27(20):2835-2839.
SONG Zuojun. Nonlinear Dynamics Analysis of Car Semi-active Suspensions[J]. China Mechanical Engineering, 2016, 27(20):2835-2839.
[2] SNAMINA J, ORKISZ P. A Comparison of Active and Semi-active Sliding Mode Controllers Applied in Vibration Reduction Systems[J]. Solid State Phenomena, 2016, 248:93-102.
[3] 周兵,吕绪宁,范璐,等. 主动悬架与主动横向稳定杆的集成控制[J]. 中国机械工程,2014,25(14):1978-1983.
ZHOU Bing, LYU Xüning, FAN Lu, et al. Intergrated Control of Active Suspension System and Active Roll Stabilizer[J]. China Mechanical Engineering, 2014,25(14):1978-1983.
[4] CHEN M Z Q, HU Y, LI C, et al. Semi-active Suspension with Semi-active Inerter and Semi-active Damper[J].IFAC Proceedings Volumes, 2014,47(3):11225-11230.
[5] 张进秋, 黄大山, 刘义乐,等. 改进的地棚半主动控制算法及其性能分析[J]. 华中科技大学学报(自然科学版), 2017,45(4):84-89.
ZHANG Jinqiu,HANG Dashan,LIU Yile,et al.Improved Ground-hook Semi-active Control Algorithm and Its Performance Analysis[J].Journal of Huazhong University of Science and Technology(Natural Science Edition),2017,45(4):84-89.
[6] 杨建伟,黄强,李伟,等. 基于加速度阻尼控制的半主动悬挂研究[J]. 铁道学报,2006,39(5):21-27.
YANG Jianwei, HANG Qiang, LI Wei, et al. Study on Lateral Semi-active Suspension Based on Acceleration Damping Control[J]. Journal of the China Railway Society, 2006,39(5):21-27.
[7] 么鸣涛, 李钊, 顾亮. 基于微分几何法的半主动油气悬架LQR控制[J]. 北京理工大学学报, 2011, 31(5):519-523.
YAO Mingtao, LI Zhao, GU Liang. LQR Control for Semi-active Hydro-pneumatic Suspension Based on Differential Geometry Theory[J].Transactions of Beijing Institute of Technology, 2011, 31(5):519-523.
[8] 孙丽琴, 李仲兴, 徐兴. 半主动空气悬架阻尼准滑模变结构控制与试验[J]. 江苏大学学报(自然科学版), 2014, 35(6):621-626.
SUN Liqing, LI Zhongxing, XU Xing. Quasi-sliding More Variable Structure Control and Test of Semi-active Air Suspension Damping[J].Journal of Jiangsu University(Natural Science Edition) , 2014, 35(6): 621-626.
[9] 寇发荣, 杜嘉峰, 张传伟,等. 电液自供能式车辆主动悬架多模式切换控制[J]. 机械科学与技术,2016, 35(12):1937-1943.
KOU Farong, DU Jiafeng, ZHANG Chuanwei,et al.Multi-mode Switching Control of Self-powered Active Suspension with Electro-hydrostatic Actuator[J].Mechanical Science and Technology for Aerospace Engineering, 2016, 35(12): 1937-1943.
[10] 李珍国, 章松发, 周生海,等. 考虑转矩脉动最小化的无刷直流电机直接转矩控制系统[J]. 电工技术学报, 2014, 29(1):139-146.
LI Zhenguo, ZHANG Songfa, ZHOU Shenghai, et al.Direct Torque Control of Brushless DC Motor Considering Torque Ripple Minimization[J].Transactions of China Electrotechnical Society, 2014, 29(1):139-146.
StudyonForceTrackingControlofEHAActiveSuspensions
KOU Farong WANG Zhe DU Jiafeng LI Dong XU Jianan HE Linglan
School of Mechanical Engineering,Xi’an University of Science and Technology,Xi’an,710054
The mathematical models of 1/4 active suspension and EHA active suspension system were established, and the influences of brushless DC motor in EHA on the system were analyzed. A force tracking control strategy was proposed based on the main loop LQG ideal force controller and the internal loop motor current controller. The controller hardware of EHA active suspension was designed, and the simulations and bench tests were carried out.The results show that the force tracking control may make the actual active forces of the motor output real-time tracking of the ideal active forces, and the feasibility of the control strategy and controller is verified.
electro-hydrostatic actuator(EHA); active suspension; force tracking control;linear-quadratic-Gaussian control
2017-09-05
国家自然科学基金资助项目(51775426,51275403);陕西省教育厅服务地方专项计划资助项目(17JF017)
U463.33
10.3969/j.issn.1004-132X.2017.24.011
(编辑王艳丽)
寇发荣,男,1973年生。西安科技大学机械工程学院副院长、教授、博士。主要研究方向为车辆振动与主动控制。发表论文40余篇。E-mail:342546738@qq.com。王哲,男,1992年生。西安科技大学机械工程学院硕士研究生。杜嘉峰,男,1993年生。西安科技大学机械工程学院硕士研究生。李冬,男,1994年生。西安科技大学机械工程学院硕士研究生。许家楠,男,1994年生。西安科技大学机械工程学院硕士研究生。何凌兰,女,1994年生。西安科技大学机械工程学院硕士研究生。
