基于Pro/E的行星齿轮减速板手设计
2017-12-28黄永程覃羡烘王鹏程
黄永程,覃羡烘,王鹏程,李 俏
(广东理工学院,广东 肇庆 526100)
基于Pro/E的行星齿轮减速板手设计
黄永程,覃羡烘,王鹏程,李 俏
(广东理工学院,广东 肇庆 526100)
三维软件的应用大大提高了设计者的工作效率和质量。本文采用三维设计软件Pro/E,建立64型行星齿轮减速扳手的各个零件三维模型及最终的装配模型。通过本软件可清楚检查各部件装配之间是否发生干涉,便于修改相应的参数,避免了繁琐的计算和修改问题。利用Pro/E三维建模在提高产品设计效率和减低产品成本具有重要作用。
Pro/E;行星齿轮;减速扳手;干涉
0 引言
在我国,货车超载、超限运输现象严重,使得货车运输中出现故障的概率大大增加,爆胎事故就是其中之一,由于爆胎的随机性,很难找到专业维修人员和设备。为此,制造专用的便携省力扳手尤为重要。通过行星齿轮传动减速放大力矩,使得输入较小的力矩,就可以输出较大的力矩,从而“轻松”地松开和紧固螺栓。一般市场上销售的便携带式扳手,其工作原理是通过增大力臂和作用力来增大扭矩。这种扳手的输入力矩也就是输出力矩。而人所产生的作用力是有限的,只能通过增大力臂来增大输出力矩,即增长扳手手柄的长度,与其便于携带这一特点产生矛盾,且这样增大的输出的扭矩也有限。行星齿轮减速扳手并不需要很长的扳手手柄,其所具有的优点:很大的输出力矩、具有所占有的空间小便于携带、所占有的配重比较低、工作的效率较高和成本低廉等。
20世纪70年代首次出现行星齿轮减速扳手,日本于1975年在北京举办工业展览会上第一次展出了特尼扳手[1]。日本、美国和德国等工业发达国家于七十年代末期已有大扭矩变扭扳手产品供应市场。现在国外的放大力矩扳手产品已向自动化、轻型化方向发展,而智能化已是其发展趋势。然而,我国的一些研究主要集中在行星轮系作为减速器和变速器的使用,包括运动的合成和分解。虽然它已被用作飞机和采矿机械的大功率传动,但很少有人研究使用扭矩放大机构的行星轮系,本文主要研究分析行星轮系的放大机构。
1 行星轮系增力原理
行星齿轮减速扳手的核心是串联起来的2K-H行星轮系减速增力机构,它能使较小的输入转矩转换成较大的转矩,这对于施力者而言是省力的。机械的功率P=Fv=Tw.所以,在功率一定的情况下,转速越低,机械输出扭矩就越大[2]。行星齿轮减速机构可将原动机的高速、小扭矩变为低速高扭矩。其转变原理如图1所示。
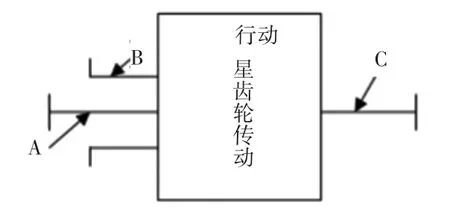
图1 行星齿轮传动及其基本结构简图
A、B、C为三个基本构件,假设摩擦损失可以忽略,如果在行星齿轮传动平衡状态下,作用外力矩在A、B、C上的代数和为零,并且A、B、C上所传递的功率代数和也等于零,即

式中:TA、TB、TC分别为基本构件 A、B、C 上的外转矩;wA、wB、wC分别为基本构件 A、B、C 上的角速度。取相对于C的角速度,则wCC=0,式(2)得:

式中Ta、Tb为中心轮的扭矩,TH为行星架的扭矩,p为行星齿轮传动的特性参数。同理可推导出串联2K-H行星齿轮传动中的转矩关系式:

式中Ta为两串联2K-H型行星齿轮传动中第一个2K-H型行星齿轮中的中心轮的力矩,即等于输入力矩;TH为第二个2K-H型行星齿轮中的行星架的力矩为输出的力矩。因此,由公式推断出使用行星齿轮减速扳手确实“增力”。
现设计要求是输入转矩T1=30 N·m,输出转矩T2=1 900 N·m,总传动比i总=64.根据传动要求设计要求输入较小力矩为30 N·m,输出大力距为900 N·m. 分配第 I、II、III级的传动比 i1= 4,i总= 64,最终选择配齿结果Z1=9,Z2=9,Z3=27.经过计算及校核最终确认各齿轮参数如表1所示[3,4]。
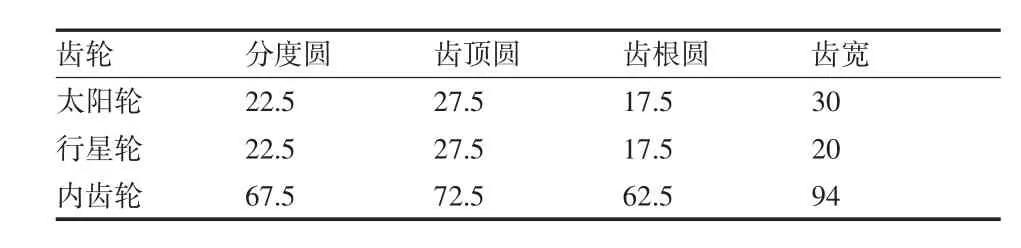
表1 齿轮基本几何尺寸(单位:mm)
2 各零件的设计
双臂整体式行星架刚性好,因此设计采用双臂整体式行星架。轴与孔之间采用过盈配合,取配合长度26 mm.材料选用40Cr淬火处理[5-7],各个零件的基本参数如图2~图5所示。
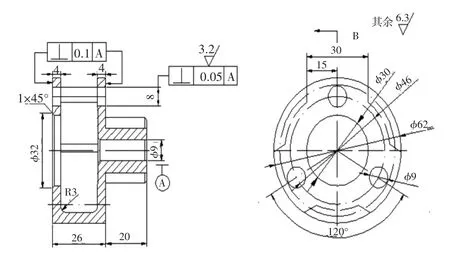
图2 芯架
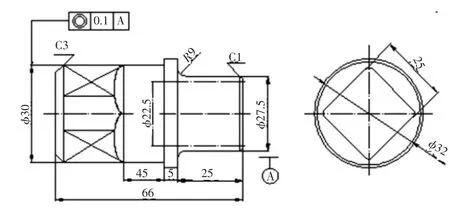
图3 输入轴
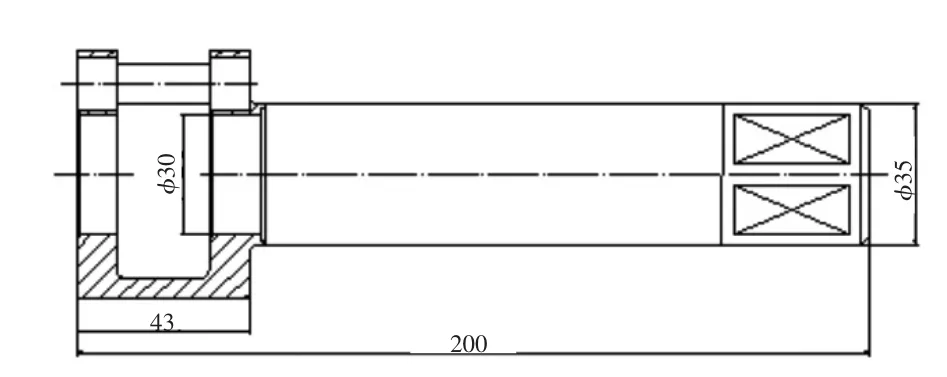
图4 输出轴
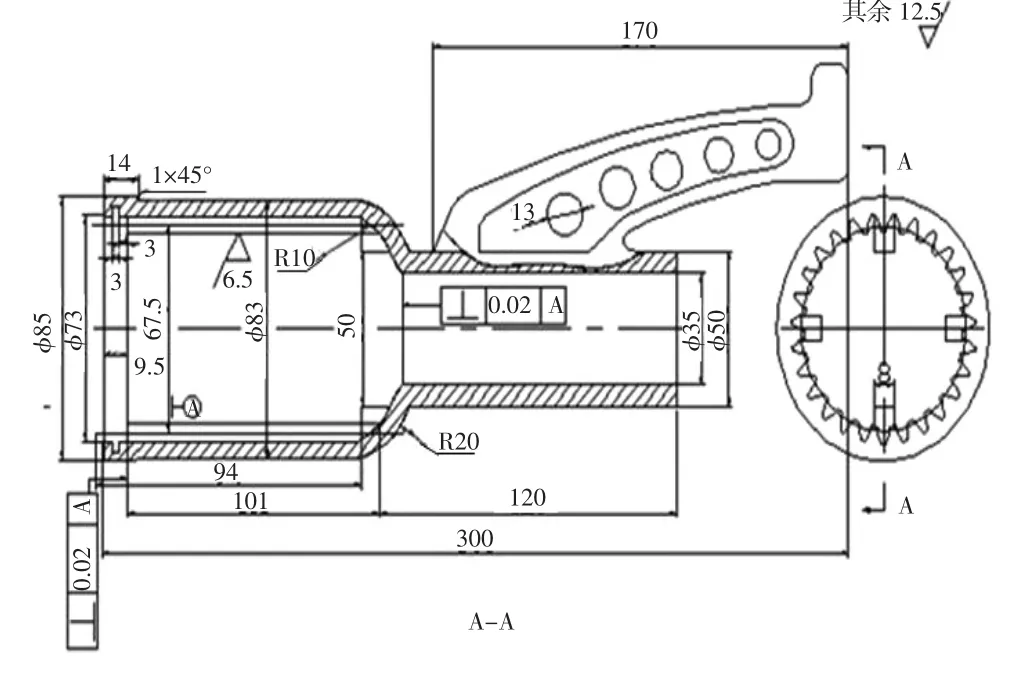
图5 筒体
3 Pro/E建模
Pro/E采用模块化的方式,可分别绘制图纸、零件制造、装配设计等,以保证用户可以根据自己的需要进行选择。(1)由产品的参数化设计,可以看到作为一个几何模型,无论多么复杂的几何模型,可以把它变成一个有限的功能和各种形式,可以完全受制于有限的参数,这是参数化的基本概念。(2)基于特征建模的Pro/E是基于特征工程设计的实体建模系统,具有基于智能特征的建模功能,如腔体、外壳、倒角和圆角、自由草图、易变化模型等。64型行星齿轮减速扳手的建模主要对齿轮、轴、芯架、筒体的建模,完成对部件的装配图,各个齿轮采用参数化建模[8,9],各个零件三维模型如图6所示。
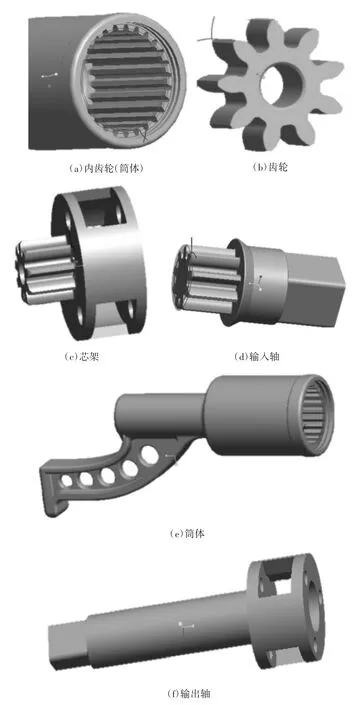
图6 主要零件模型
最终完成各个零件的装配,形成装配如图7和图8所示。
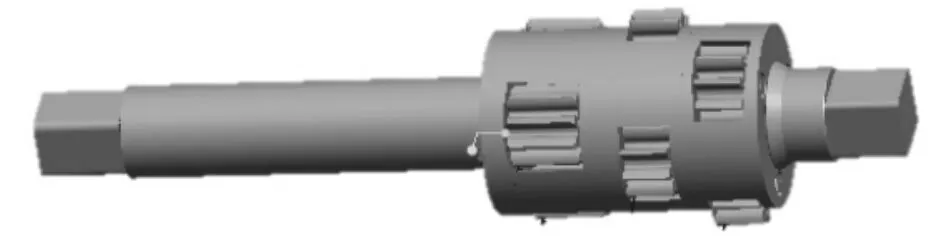
图7 传动结构
4 总结
三维机械设计采用Pro/E软件,是为了让设计者获得良好的三维空间环境,结构设计不再需要艰难的概念想象,而是在一个非常直观的3D环境中进行。同时避免大尺寸和繁琐的计算,通过直接观察和测量的更换,保证整个设计的正确性,大大提高了生产效率,对推动企业技术进步和发展的一个很好的促进作用。
[1]张铁铭.日本工业技术展览会[J].工具技术,1976,13(02):44-48.
[2]孙 恒,陈作模.机械原理[M].7版.北京:高等教育出版社,2006:55-100.
[3]徐 灏.机械设计手册[M].2版.北京:机械工业出版社,2000.
[4]齿轮手册编委会.齿轮手册(上、下)[M].北京:机械工业出版社,2000:78-100.
[5]濮良贵,纪名刚.机械设计[M].8版.北京:高等教育出版社,2010:23-45.
[6]孙训方,方孝淑.材料力学[M].5版.北京:高等教育出版社,2014:54-78.
[7]何铭新,钱可强.机械制图[M].7版.北京:高等教育出版社,2016:46-90.
[8]周大伟.Pro/E参数化设计在直齿轮建模中的应用[J].河南科技,2014,39(11):135.
[9]张 延,胡修池.Pro/ENGINEER Wildfire 5.0应用教程[M].北京:机械工业出版社,2012:36-58.
The Application of Pro/E in Planetary Gear Reducer
HUANG Yong-cheng,QIN Xian-hong,WANG Peng-cheng,LI Qiao
(Guangdong Polytechnic College,Zhaoqing Guangdong 526100,China)
With the application of 3D software,the efficiency and quality of designers have been greatly improved.This paper adopts the three-dimensional design software Pro/E to establish type 64 planetary gear wrench parts 3D model and final assembly model,through this software can clearly check between the parts assembly interference,easy to modify the corresponding parameters,to avoid the tedious calculation and modification.Pro/E 3D modeling plays an important role in improving product design efficiency and reducing product cost.
Pro/E;planetary gear;deceleration wrench;interference
TH132
A
1672-545X(2017)10-0202-03
2017-07-28
项目名称:广东理工学院教学研究与改革《机械制图与CAD(二)》课程改革与研究(JXGG2016010)
黄永程(1989-),男,安徽宿州人,硕士,助教,研究方向为数字化设计与制造;覃羡烘(1983-),女,广西平南人,讲师,教研室主任,研究方向为机械工程。
