加权数据融合方法在多声道超声波流计测量中的应用*
2017-12-26张彦楠
张彦楠,杨 彬
(1.河北工业大学控制科学与工程学院,天津 300130;2中环天仪股份有限公司,天津 300384)
加权数据融合方法在多声道超声波流计测量中的应用*
张彦楠1,杨 彬2*
(1.河北工业大学控制科学与工程学院,天津 300130;2中环天仪股份有限公司,天津 300384)
针对多声道超声波流量计在流体流速测量时由于某个换能器不能正常工作而导致测量存在误差的问题。在多传感器数据融合理论的基础上并对其进行改进,提出了一种适用于多声道超声波流量计的数据融合计算方法,同时改进后的最优加权数据融合方法能够在每次测量后自适应的计算最优权重系数。通过实验表明当流量计各声道均能正常工作时,该方法与Gauss-Jacobi积分法计算得到的流速值基本一致,当流量计单个声道不能正常工作时,应用该方法可以得到比Gauss-Jacobi积分法更加稳定的流速值,能够减小测量误差给计算结果带来的影响。
多声道超声波流量计;测量误差;数据融合;最优权重系数;最小均方误差
近年来,超声波流量测量技术得到了很大的发展,因其具有非接触式测量、低压损、测量范围宽等优点[1],已经被广泛地应用于水利、电力、石油、化工、自来水及食品等行业。多声道超声波流量计在待测截面上布置多个换能器,通过精确地测量各声道上超声波沿水流顺向与逆向传播的时间差,计算出各声道流速,并用加权积分的方法计算出流速和流量[2]。相较于单声道超声波流量计,其测量准确度更高。
目前多声道超声波流量计普遍应用Gauss-Jacobi积分法和OWICS(最佳圆断面积分方法)两种方法来计算圆形管道的流体流速。但是这两种积分方法都使用固定的权重系数来计算流体流速[3],当某个换能器不能正常工作或者待测流体中夹杂大量杂质或者气泡而导致测量结果存在较大误差时,通过这两种积分方法计算的流速同样会存在较大的误差。
1 多声道超声波流量计测量原理
时差法超声波流量计利用一对置于待测截面两侧的超声波换能器交替收发超声波,通过测量超声波在顺水流和逆水流中传播的时间差来计算管道内流体流速[4]。
各声道测量得出的流体轴向流速的表达式为:
(1)
式中:vi表示第i条声路测得的流体轴向速度,Li表示第i条声道长度,α表示声道角,t1,i和t2,i分别表示第i条声道的顺流传播时间和逆流传播时间,i表示声道数,本文中取i=4。
多声道超声波流量计计算待测截面流量的方法为:首先计算各个声路的换能器测量得到的平均轴向速度vi,然后根据各声道所占的权重系数ωi通过加权求和的方法计算管道内流体的流速[5]。多声道超声波流量计计算管道横截面流速表达式为:
(2)
式中:n表示流量计的声道数量。
待测管道的横截面如图1所示,zi为声道高度,di表示第i条声道的宽度。在利用数值积分方法计算待测截面流量时,为了方便对不同的管道半径进行计算,令声路高度zi=tiR,ti为相对声路高度,可以将区间[-R,R]上的定积分转换成在区间[-1,1]上的定积分。

图1 待测管道的横截面图
最常应用的Gauss-Jacobi积分方法认为管道内流体呈均匀分布,并不能体现出管道近壁处的流速为零的特点[6]。而OWICS方法考虑到了充分发展的圆管湍流的实际声路速度的分布情况与理想的代数多项表达式之间存在差异的问题,使其积分准确度比Gauss-Jacobi积分法更高。
应用Gauss-Jacobi积分法和OWICS两种方法计算得到的四声道超声波流量计各声路的相对声路高度ti及其权重系数ωi如表1所示[7]。
Gauss-Jacobi积分法和OWICS两种方法计算得到的相对声路高度ti及其权重系数ωi都是固定不变的值,当某个换能器不能正常工作或者待测流体中夹杂大量杂质或者气泡而导致测量结果存在较大波动时,应用这两种方法计算得到了流体流速同样会产生波动,从而导致测量准确度降低甚至不能准确测量。

表1 四声道超声波流量计的声路高度和权重系数
2 多传感数据融合方法
近年来,数据融合技术得到了迅速发展,并在许多领域得到了实质性的应用。使用多传感器数据融合方法能够有效的融合从多个传感器获得的测量数据,对测量数据提供更稳定、更精确的估计[8]。
2.1 基于MMSE的数据融合
假设系统中有N个传感器来观察一个未知量Y,不同传感器的测量值用{Yj}(j=0,1,2,…,N)表示。
假设不同测量序列之间是无偏且相互独立的,那么观测Y可以由LMS(最小均方差估计)得到[9]:
(3)
式中:Wj满足公式:
(4)
方差估计可以表示为:
(5)
式中:σj(j=0,1…N)表示第j个传感器测量序列的方差,在式(4)的约束条件下,对式(5)中的噪声方差求最小值,便可以求得最优的权值,表示为[10]:

(6)
该方法也被称为最优加权的数据融合方法,只要确定了σj(j=0,1…N)的值,便可以求得数据融合过程中的最优权重系数。但是该方法适用于多个传感器对同一未知量的测量,而在多声道超声波流量计的流速测量中,由于各声道换能器测量的数据并不是同一个流速数据,所以该方法不能直接应用于多声道超声波流量计的数据融合中。
2.2 改进后的最优加权数据融合方法
假设多声道超声波流量计的各声道测量得到的流速值为vi,并且测量值中包含相应的测量噪声ni,则多声道超声波流量计的流速积分计算公式为:
(7)

(8)
式中:E[X]表示数学期望。根据最小均方差估计理论,当式(8)所示的均方误差取最小值时,式(7)中的权重系数为最优权重系数值。分别计算式(8)中均方误差e对权重系数w1~w4的导数,并令导数公式等于0,便可以得到下列方程组:
(9)


(10)
应用式(10)进行最优权重系数计算时,为使其能及时、准确的反映出外界环境干扰等因素对流速测量结果的影响,需要解决权重系数动态修正的问题。
假设第i个换能器测量的数据为{vim}(m=0,1…n),那么n个测量值的平均值为:
(11)
方差为:
(12)
如果第i个换能器的第n+1次实时测量数据为vi(n+1),那么便可以通过前面的n个测量值的平均值获得(n+1)个测量数据的平均值,计算公式为:
(13)
(n+1)个测量数据的方差为:
(14)
将式(14)进行化简,化简后的(n+1)个测量数据的方差为:
(15)
根据上述公式便可以通过第i个换能器测量的前n个数据的方差来计算第n+1次测量数据的方差。每当有新一个数据测量完成后便进行一次方差以及权重系数的计算,使得每次测量后的权重系数能进行自动修正。对多个传感器的数据依据权值最优分配原则进行自适应加权融合,便可以层层降低误差[12]。
2.3 数据融合算法的实现流程
根据以上分析,算法的实现流程为:从第i个换能器测量得到的第2个流速数据开始计算前两个数据的平均值和方差,根据式(10)计算各声路换能器的权重系数,应用计算得到的权重系数进行流速计算,当第3个数据测量完成后,根据式(15)计算前3个数据的平均值和方差,然后重新计算权重系数并计算流速,依次类推,直到第n个数据测量并完成计算。改进后的最优加权的数据融合方法的计算流程图如图2所示。

图2 最优加权数据融合方法的计算流程图
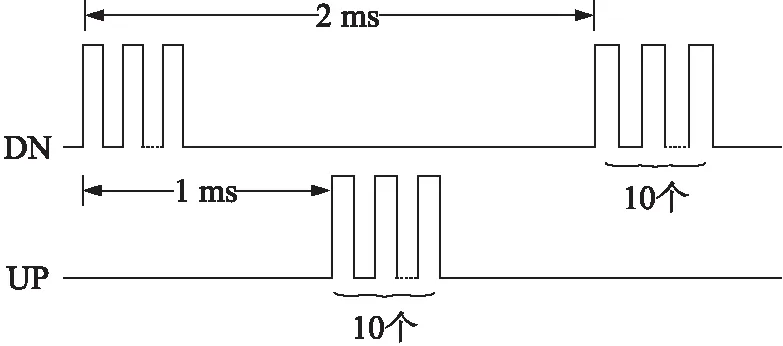
图3 超声波换能器信号发射的脉冲时序图
3 实验结果分析
实际应用中,超声波流量计的换能器发射信号的触发脉冲的时序如图3所示:正程或逆程相邻两次发射的间隔时间为2 ms,相邻正逆程发射之间的间隔时间为1 ms[13]。
超声波流量计显示流量的更新频率为0.5 s,即每隔0.5 s超声波流量计的显示流量会更新一次。0.5 s时间内超声波流量计会发射和接收超声波信号250次,每个声道可以计算得到250个流速值。实验中选取四声道超声波流量计对口径为100 mm的长直管段进行流速测量,各声道按照图1所示进行布置,声道高度为Gauss-Jacobi积分法计算得到的声道高度,从上到下依次为1-4声道,声道角度α为45°,流体为液态水,管道入口流体流速为5 m/s。计算得到一个显示周期内各声道250次测量的流速值如图4所示。
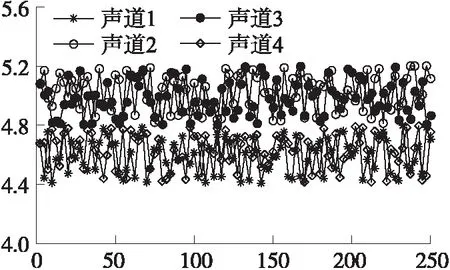
图4 一个显示周期内各声道250次测量的流速值

图5 各声道动态变化的最优权重系数
将测量计算得到的一个显示周期内各声道250次测量的流速值按照图2所示的改进后的最优加权的数据融合方法的计算流程进行计算,便可以在每一次测量流速后计算各声道的最优权重系数。每次测量计算得到的最优权重系数如图5所示。
将每次测量计算得到的各声道的最优权重系数进行平均计算并与Gauss-Jacobi积分法计算得到的各声道权重系数进行比较,如表2所示。
如表2所示,如果各声道换能器均能正常工作,那么应用改进后的最优加权数据融合方法计算得到的最优权重系数的平均值和常用的Gauss-Jacobi积分法计算得到的各声道权重系数相差很小。应用这两种方法计算一个显示周期内各声道250次测量的流速值的融合结果如图6所示。
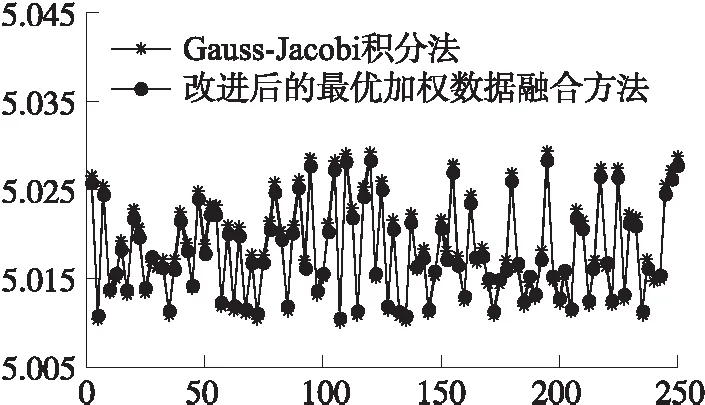
图6 两种方法计算得到的流速值的融合结果
如图6所示,当多声道超声波流量计各个声道都能正常的工作来测量流体流速时,应用这两种方法计算得到的管道流速值基本一致,说明应用改进后的最优加权数据融合方法计算流体流速在正常情况下能够实现较好的数据融合效果。
而实际应用中,随着超声波流量计使用年限的增加或者流体中夹杂过量气泡或杂质,都可能使其存在某个换能器测量的流速值存在较大偏差。实验中在第2声道测量的流速值数据上添加白噪声,使其测量结果产生较大的波动,用来模拟单个换能器测量不准的情况。第2声道换能器测量不准时的一个显示周期内各声道250次测量的流速值如图7所示。
同样按照图2所示的改进后的最优加权的数据融合方法的计算流程进行计算,便可以在每一次测量流速后计算各声道的最优权重系数,如图8所示。

图8 各声道动态变化的最优权重系数
将每次测量计算得到的各声道的最优权重系数进行平均计算并与Gauss-Jacobi积分法计算得到的各声道权重系数进行比较,如表3所示。

表3 两种方法计算得到的权重系数的对比
如表3所示:如果第2个声道换能器不能正常工作,此时各声道计算得到的权重系数会发生明显的变化,测量不准确的第2声道所占比重大大减小,而其他声道流速的权重系数增大,说明应用改进后的最优加权数据融合方法进行流速计算时可以自动的减小不能正常工作的换能器测量数据在计算管道截面的流速时的比重,减小测量误差对最终流速数据融合的影响。
在第2声道换能器测量不准的情况下,应用这两种方法计算一个显示周期内各声道250次测量的流速值的融合结果如图9所示。

图9 两种方法计算得到的流速值的融合结果
如图9所示,当多声道超声波流量计第2个声道不能正常的工作时,应用Gauss-Jacobi积分法计算得到的管道流速会受到测量误差的影响而使得最终的计算结果同样会存在较大波动,而应用改进后的最优加权数据融合方法计算得到的流体流速明显要比Gauss-Jacobi积分法更加稳定,说明应用改进后的最优加权数据融合方法进行流体流速计算时,通过每次测量数据后对各声道权重系数进行自动修正,可以减小测量误差对流速测量结果影响,使得流速计算结果更加准确。
4 结论
当多声道超声波流量计的某个换能器在测量流体流速时不能正常工作而导致测量结果存在较大误差时,通过对基于MSE的数据融合算法进行改进,使其适用于超声波流量计多个声路测量的流速值的融合计算,在一个显示周期内每进行一次流速测量,便通过改进后的最优加权数据融合方法自适应的计算最优权重系数,从而减小测量误差对流速计算结果的影响。
通过实验处理一个周期内正常测量的流速数据和单个换能器非正常工作时的流速数据,得出当流量计各声道均能正常工作时,应用改进后的最优加权数据融合方法计算得到的管道流速值与Gauss-Jacobi积分法计算得到的流速值基本一致,而当流量计单个声道不能正常工作时,应用改进后的最优加权数据融合方法计算得到的管道流速值较Gauss-Jacobi积分法计算得到的流速值更加稳定,说明应用改进后的最优加权数据融合方法进行管道流速值计算可以减小测量误差对流速测量结果影响,使得流速计算结果更加准确。
[1] 孟丹丹. 多声道管段式超声波流量计[J]. 仪器仪表用户,2016,23(8):24-16.
[2] 黄永峰. 时差式超声波流量计新测量方法的设计与实现[D]. 哈尔滨:哈尔滨工程大学水声工程学院,2007.
[3] 张皎丹,郑丹丹,张涛,等. 多声道超声流量计数值积分方法优化[J]. 化工自动化及仪表,2014,42(2):144-147.
[4] 王献勇. 基于DSP的多声道超声流量计的设计[D]. 天津:河北工业大学信息工程学院,2013.
[5] 欧阳诗慧. 基于时差法多声道超声波气体流速测量的研究[D]. 秦皇岛:燕山大学电气工程学院,2014.
[6] 张朋勇. 超声流量计非理想流场适应性研究[D]. 天津:天津大学电气与自动化工程学院,2011.
[7] 曹译恒. 多声道超声波流量计的设计与实验研究[D]. 郑州:河南工业大学电气工程学院,2015.
[8] 李超,胡谋法,刘朝军,等. 基于小波的多传感器空间目标数据融合算法[J]. 信号处理,2006,22(2):203-206.
[9] Xu Lijun,Zhang Jianqiu,Yan Yong. A Wavelet-Based Multisensor Data Fusion Algorithm[J]. IEEE Transaction on Instrumentation and Mesurement,2004,53(6):1539-1545.
[10] 姜天宇. 基于多MEMS传感器数据融合的组合测姿系统的设计与实现[D]. 南京:东南大学软件学院,2015.
[11] Peng Lihui,Zhang Bowen,Zhao Huichao,et al. Data Integration Method for Multipath Ultrasonic Flowmeter[J]. IEEE Sensors Journal,2012,12(9):2866-2874.
[12] 王华东,王大羽. 一种改进的多无线传感器数据分批估计自适应加权融合算法[J]. 传感技术学报,2015,28(8):1239-1243.
[13] 秦文. 智能型管段式液体超声波流量计的研究与设计[D]. 天津:河北工业大学控制科学与工程学院,2015.
ApplicationofWeightedDataFusionMethodinMulti-PathUltrasonicFlowmeterMeasurement*
ZHANGYannan1,YANGBin2*
(1.School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China;2.China Zhonghuan Tig Co.,Ltd,Tianjin 300384,China)
In view ofthe problem that the measurement error caused by a transducer can not work normally in the measurement of the flow velocity of the multi-path ultrasonic flowmeter. On the basis of multi-sensor data fusion theory and its improvement,a data fusion calculation method suitable for multi-path ultrasonic flowmeter is proposed,meanwhile the improved optimal weighted data fusion method can adaptively calculate the optimal weight coefficient after each measurement. The experimental results show that the flow velocity calculated by this method and the Gauss-Jacobi integral method are basically consistent when the channels of the flowmeter can work normally,When single channel of the flowmeter can not work normally,this method can be used to obtain more stable flow velocity than the Gauss-Jacobi integral method,it can reduce the influence of measurement error to the calculation result.
multi-path ultrasonic flowmeter;measurement error;data fusion;optimal weight coefficient;minimum mean square error
10.3969/j.issn.1004-1699.2017.12.029
项目来源:天津市科技支撑计划项目(15ZCZDGX00730)
2017-05-10修改日期2017-08-01
TH814
A
1004-1699(2017)12-1959-06
张彦楠(1991-),在读研究生,主要研究领域为智能检测与智能系统,气体超声波流量计,zhangyannan321@163.com;
杨彬(1980-),博士,正高级工程师,硕士研究生导师,研究方向为工业自动化仪表、总线通信,yangbin@tig.com.cn。
