一种适用于单轴MEMS倾角仪的快速标定方法及实现*
2017-12-26刘一鸣张艳艳胡陈君
兰 洋,李 杰,*,张 波,刘一鸣,张艳艳,胡陈君
(1.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;2.兰州资源环境职业技术学院,兰州 730000;3.苏州中盛纳米科技有限公司,江苏 苏州 215123)
一种适用于单轴MEMS倾角仪的快速标定方法及实现*
兰 洋1,李 杰1,2*,张 波1,刘一鸣1,张艳艳2,胡陈君3
(1.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;2.兰州资源环境职业技术学院,兰州 730000;3.苏州中盛纳米科技有限公司,江苏 苏州 215123)
针对单轴倾角仪核心元件MEMS加速度计零点电压和标度因数在反复上电后会发生改变,且在外场环境下,不能通过转台对其进行修正的问题,本文根据MEMS加速度计的安装误差、输出模型推导了单轴倾角仪的标定模型,提出了一种适用于单轴倾角仪的快速标定方法,并利用实验室研制的MEMS单轴倾角仪及LABVIEW软件编写的上位机对该方法进行了试验验证。实验表明,该快速标定方法可快速、准确地修正MEMS加速度计零点和标度因数的漂移,从而保证倾角仪的测量精度,具有良好的工程实践意义。
单轴倾角仪;MEMS加速度计;LABVIEW;快速标定;
单轴MEMS倾角仪通过加速度计测量重力加速度变化,并根据坐标变换理论转换成倾角变化,该种倾角仪具有体积小、功耗低和价格低廉等优点,使得其在很多工程领域上都有重要的应用。单轴倾角仪的核心元件是由两个敏感轴相互垂直的MEMS加速度计组成[1-2],其标度因数和零点电压是影响倾角仪测量精度的主要因素[3-4]。
实际情况下,因其安装过程中不可避免地会引入误差角,加速度计的两个敏感轴并不完全正交[5-6],一般通过建立标定模型使用转台进行重力场翻转的标定求得其标度因数、安装误差角矩阵和零点,从而把加速度计的输出电压值准确转化为准确的倾角信息,提高测量精度[7]。由于MEMS传感器的内部结构、制造工艺等原因[8],每次上电之后,其零点和标度因数都会发生变化,而倾角仪的实际应用环境通常不在实验室,不能通过转台进行校准[9]。因此,亟需提出一种不需要借助外部设备即可在其使用前进行快速、准确标定的方法,从而保证其测量精度。
本文从理论上推导了单轴倾角仪快速标定方法,并利用实验室研制的倾角仪和自编程的上位机进行了相关实物试验。该快速标定方法的实现,补偿了因外场环境难以找到水平基准而引入的误差,避免了转台标定繁琐的安装和操作,仅需120 s左右便可完成整个标定过程,极大地缩短了标定所需时间。最后,通过转台试验,结果表明本文所述的快速标定方法能快速、准确地修正因MEMS加速度计反复上电等原因引起的标度因数、零点漂移,从而保证倾角仪的测量精度。
1 快速标定原理
1.1 单轴倾角仪标定数学模型
由于倾角仪外壳的制造误差和MEMS加速度计安装误差等原因,加速度计敏感轴的实际位置为OXaYa(下称为a系,其两轴不正交),而理论上加速度计敏感轴位置为OXbYb(下称为b系,其两轴正交)如图1所示。

图1 坐标轴定义
图1中θji为b系坐标轴与a系坐标轴之间的夹角。其中i表示b系中Xb轴或Yb轴,j表示a系中Xa轴或Ya轴。
设在a系下,加速度计敏感到的比力为:
fa=[faxfay]T
(1)
b系下,加速度计敏感到的比力为:
fb=[fbxfby]T
(2)
由于安装误差等因素,根据坐标变换理论有下式[10]:
fai=[cosθxicosθiy]fb
(3)
fai为a系下i轴(Xa或Ya)上的比力。
对MEMS加速度计而言,其输出的一般数学模型[11-12]如下:
u=kf+u0
(4)
式中:u为加速度计输出的电压值,单位为V;k为加速度计的标度因数,单位V/gn;f为加速度计敏感到的比力,单位gn(gn为重力加速度);U0为加速度计的零点电压,单位V。
将式(3)代入式(4)整理得:
(uai-u0i)/ki=[cosθxicosθiy]fb
(5)
即有:
(6)
对式(6)整理得:
(7)
式(7)中:kx和ky为a系中加速度计的单轴标度因数。令σ为倾角仪的安装误差矩阵,则有:
(8)
倾角仪组装完成时,安装误差角就不再发生变化,即安装误差矩阵σ不会随时间而改变,其大小可在实验室环境下,通过转台标定得出,所以在外场环境下,不需要对其进行标定。只需求出倾角仪中加速度计的单轴标度因数即可更新标度因数矩阵。
1.2 单轴倾角仪快速标定原理
在加速度计进行重力场翻转实验的时候,当其敏感轴处于同一直线上且方向相反的两个位置时,则此时加速度计敏感到的加速度互为相反数,如图2所示。

图2 加速度计敏感轴方向与加速度关系
通常实验室标定单轴加速度计的简易方法是在转台上进行4个位置的重力场翻转试验,即0gn,+1gn,0gn,-1gn4个位置。标定的数据处理方法则是对标定轴+g和-g的电压值求平均后相加减即可求出零点。如下式:
(9)
接下来说明单轴标度因数的快速标定原理。快速标定需要严格按照如图3所示的位置翻转完成,其中图3(a)为倾角仪X轴相对平面(外场环境下)朝上放置,图3(b)为X轴相对该平面朝下放置同时使Y轴方向与图3(a)Y轴方向相反,图3(c)为Y轴相对于该平面朝下放置并使X轴方向与图3(a)中Y轴方向相同,图3(d)为Y轴相对该平面朝上放置并使X轴方向与图3(a)中Y轴方向相反。

图3 倾角仪X轴标定原理图
由于在没有转台提供位置基准的条件下,难以找到绝对的平面,所以假设外场环境下的平面与理想平面之间的夹角为α,重力加速度为g,则当倾角仪处于图3(a)状态时的可得到下式:
(10)
由图3(b)可得:
(11)
由图3(c)可得:
(12)
由图3(c)可得:
(13)
式中:UXa_i为第i次位置翻转时,标定轴X轴的电压值,kx为X轴加速度计的标度因数,u0x零点电压。
由图3得:
(14a)
(14b)
整理得:
(15a)
(15b)
则由式(10)~(13)、式(15)可得:
(16a)
(16b)
由式(15a)得:
u0x=(UXa_1+UXa_2+UXa_3+UXa_4)/4
(17)

(18)
由式(16b)得:
u0y=(UYa_1+UYa_2+UYa_3+UYa_4)/4
(19)

(20)
1.3 单轴倾角仪输出倾角与加速度计电压的关系
定义单轴倾角仪的X轴竖直朝上,Y轴与X轴垂直。由坐标系变换理论可知,倾角仪输出角度θ与加速度计敏感的加速度有如下关系:
(21)
由式(6)可知加速度计的输出电压与加速度的关系为:
(22)
即倾角仪输出倾角θ与加速度计电压关系如下:
(23)
整理式(23)得:
(24)
式(24)即为倾角仪输出角度θ与X、Y轴加速度计电压值的关系。
本文通过图3所示的四位置翻转,并通过严谨的数学推导得出了单轴标度因数和零点电压的计算公式,同时充分考虑了在外场环境下难以找到理想的水平面的问题,并通过数学方法补偿了平面倾斜角在快速标定过程中引入的误差。
2 快速标定实现
本文通过自编程的LabVIEW上位机实现标定步骤的控制,同时利用倾角仪内部的数据采集模块实现标定数据的采集,最后上位机对采集的标定数据按程序进行处理。避免了繁琐的转台安装、转台控制程序的编写,实验数据的一键处理极大地提高了整个标定的速度。

图4 标定系统总体框图
标定系统由LABVIEW上位机标定控制部分和下位机(即倾角仪硬件部分)组成。上位机控制下位机按指定的步骤进行标定,同时下位机把采集的加速度计数据通过串口传给上位机,上位机对数据进行实时分离,经过相应计算后存储。待标定过程完成后,上位机可直接计算出单轴标度因数和零点电压并存储,同时发送给下位机更新标度因数矩阵和零点电压。
标定系统工作原理如图5所示。

图5 标定系统工作原理
标定系统操作过程如下:①首先上位机通过串口向下位机发送命令1,使其进入中断,即进入标定模式,此时下位机停止向上位机发送当前倾角仪输出的角度数据。②摆放倾角仪X轴相对平面朝上,上位机发送命令2,控制下位机采集X、Y加速度计的电压值,并按照预先约定好的帧格式将采集到的数据发送给上位机。下位机返回结束指令后,下位机处于命令等待状态。③接下来依次执行命令3,4,5,操作同②。④执行完指令5后,执行命令6,上位机进入计算模式,即上位机按照设定的程序计算出快速标定得到的标度因数和零点并显示在界面上,同时以一定格式存储,操作上位机将标度因数和零点电压发送给下位机,下位机收到数据并更新标度因数矩阵和零点后向上位机返回命令,同时自动退出标定模式,下位机开始向上位机发送角度数据。
倾角仪中MEMS加速度计采用的是SDI1521,量程为±2 gn,5 V供电,其输出信息为模拟量,采用美国亚德诺半导体公司生产的低功耗、高精度、快速建立的24 bit Σ-AD7173进行模数转换,STM32为主控单元,通过SPI串口控制模数模块对传感器输出的模拟信号进行采样、保持并判断模数模块是否转换完成,然后通过对转换完成后的数字信号进行编帧,最后通过串口把帧数据传输给上位机。标定状态下帧的格式如表1所示。

表1 快速标定数据帧格式
如表1所示快速标定状态下产生的数据一帧共7 byte(十六进制表示),其中byte01-02表示帧头,上位机识别帧头可对数据进行实时分离;byte03-04表示帧计数,用于判断错帧漏帧;byte05-07表示3 byte的加速度计输出电压数据。上位机接收到的帧数据中的每个字节的十六进制数自动转化为了十进制,分离出3 byte的有效数据后,按照下式进行处理得到加速度计电压值:

3 LabVIEW上位机设计
上位机共有3个模块,模块一中用波形图表对接收的角度数据、电压值、倾角仪内部温度值进行波形显示,读取缓冲区显示接收到的数据;模块二为动画模块,可直观地反应倾角的变化;模块三为快速标定模块。由于本文所述倾角仪快速标定方法不涉及前两个模块,故不作过多说明。
图6为倾角仪放在水平面上的显示状态,此时倾角为1.413 4°,X轴相对平面水平,其电压值为2.510 09V,而Y轴相对于平面朝上。快速标定模块中,点击开始标定,则进入中断,下位机停止向上位机发送角度帧数据,波形图表和动画模块锁定,摆放好倾角仪使其X轴相对平面朝上,点击X轴+g,同时指示灯亮起,待数据采集完毕,上位机收到下位机返回值后,指示灯熄灭。按照本文第2部分所述步骤依次操作,当标定完Y轴(相对平面朝下),指示灯熄灭后,自动进入计算模式,计算出各个轴的标度因数,和零点电压,点击发送按钮,则上位机把快速标定得出的标度因数和零点电压发送给下位机,可使其更新标度因数矩阵和零点电压,图为正在发送标度因数和零点电压状态,待上位机收到下位机返回值后,指示灯熄灭,同时下位机自动退出标定模式,界面重新恢复动态画面。
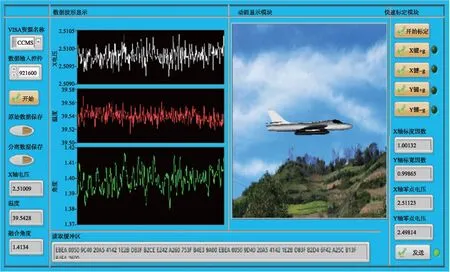
图6 倾角仪快速标定上位机
4 试验验证
为了验证本文所述快速标定方法的有效性,利用转台设计了两组对比试验,分别从快速标定方法对加速度计的标度因数、零点的修正和对倾角仪测量精度的影响两方面进行验证。
4.1 标度因数、零点电压修正对比试验
利用实验室自行研制的30天未进行转台标定的单轴倾角仪进行了如下试验:①记录30天前,由转台标定所得倾角仪的标度因数与零点电压;②利用转台,对该倾角仪进行重新标定,记录重新标定所得倾角仪的标度因数与零点电压;③利用本文所述方法,对该倾角仪进行快速标定,记录其标度因数与零点电压。
转台标定前、转台标定后、以及快速标定后的标度因数、零点电压列表如表2所示。

表2 转台标定前后与快速标定后标度因数和零点电压对比
忽略转台误差和数据处理误差,认为转台标定后所得加速度计标度因数和零点电压为真实值。对表2中转台标定后和快速标定后的标度因数、零点电压与标定前标度因数、零点电压作差得到修正量1和修正量2,如表3所示。

表3 转台标定与快速标定后对标度因数和零点的修正量对比
从表3中可以看出修正量1与修正量2在同一数量级,说明本文的快速标定方法能对倾角仪中MEMS加速度计的标度因数以及零点漂移进行有效的修正。
4.2 倾角仪测量精度对比试验
试验步骤如下:
①驱动转台中框使倾角仪依次在15°,10°,5°,0°,-5°,-10°,-15°的角位置静置一段时间,并保存实验数据。
②用本文所述方法对倾角仪进行快速标定,并用快速标定后的倾角仪重复试验步骤①。
图7中点划线为快速标定后倾角仪的角度输出,而实线为未经过快速标定的角度输出,粗线为转台提供的标准角度位置。其中两个局部放大图分别是角位置处于10°和-10°时的对比图。
差值1为快速标定前与标准角度的偏差,差值2是快速标定后与标准角度的偏差,显然。由差值1和差值2可以看出经过快速标定后倾角仪的测量误差较快速标定前减小了一个数量级。由图7与表4可知,快速标定后倾角仪输出的角度较快速标定前更为接近转台标准角度位置,说明经过快速标定后的倾角仪测量精度有较为明显的提升,验证了本文快速标定方法的有效性。
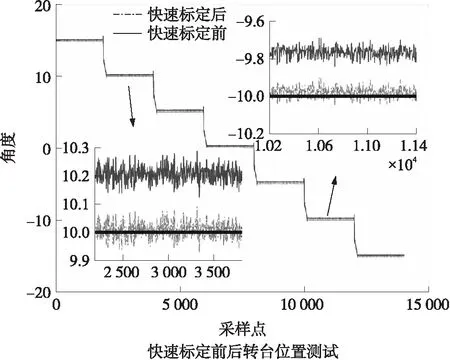
图7 倾角仪快速标定前后转台位置试验角度输出对比图

角度/(°)标定前差值1标定后差值21515.09600.096014.90470.09531010.21710.217110.00800.008055.28920.28925.06780.067800.22870.22870.08120.0812-5-4.68150.3185-4.90980.0902-10-9.75570.2443-9.97800.0220-15-14.86400.1364-15.07400.0737
5 结束语
MEMS加速度计是单轴倾角仪的核心元件,其输出的准确性直接影响倾角仪的测量精度。本文在单轴倾角仪加速度计安装误差模型和输出数学模型的基础上,推导了单轴倾角仪的标定数学模型,提出了一种适用于MEMS单轴倾角仪的快速标定方法,并利用实验室研制的单轴倾角仪以及基于LabVIEW的上位机进行了相关实物验证试验。实验表明,本文所述的快速标定方法能快速、准确地修正倾角仪中MEMS加速度计因反复上电等原因引起的标度因数、零点漂移,从而保证倾角仪的测量精度,具有重要的工程应用价值。
[1] 郭敏,尹光洪,田曦,等. 基于三轴加速度计的倾斜角传感器的研究与设计[J]. 现代电子技术,2010(8):173-177.
[2] 韩宏,吴嘉澍. 基于加速度计的数字式倾角仪的设计[J]. 传感器技术,2005,18(4):48-50.
[3] 刘伟,李杰,刘一鸣. MEMS数字倾角仪的标定补偿方法研究[J]. 传感技术学报,2016,29(6):892-896.
[4] 李杰,洪惠惠,张文栋,等. MEMS微惯性测量组合标定技术研究[J]. 传感技术学报,2008,21(7):1169-1173.
[5] 田晓春,李杰,范玉宝,等. 一种微惯性测量单元标定补偿方法[J]. 传感技术学报,2012,25(10):1411-1415.
[6] 邓泊骏. 基于MEMS加速度计的电子倾角仪角度修正算法的实现[J]. 信息化建设,2016(4):289-290.
[7] 刘一鸣,李杰,刘秀锋,等. 一种加速度计的标定补偿方法研究[J]. 传感技术学报,2016,29(12):1846-1852.
[8] 郑长勇,陈军宁. 一种新型MEMS加速度计温度补偿方法研究[J]. 传感技术学报,2015,28(1):39-42.
[9] 李四海,南江,辛格. 捷联惯导加速度计参数外场标校方法[J]. 中国惯性技术学报,2011(4):423-426.
[10] 赵桂玲,姜雨含,李松. IMU标定数学建模及误差分析[J]. 传感技术学报,2016,29(6):886-891.
[11] 秦永元. 惯性导航[M]. 第2版. 北京:科学出社,2014:5-7.
[12] 刘俊,石云波,李杰. 微惯性技术[M]. 北京:电子工业出版社,2005:40-43.
AFastCalibrationMethodandRealizationforSingle-AxisMEMSInclinometer*
LANYang1,LIJie1,2*,ZHANGBo1,LIUYiming1,ZHANGYanyan1,HUChenjun3
(1.Science and Technology on Electronic Test,North University of China,Taiyuan 030051,China;2.Lanzhou Resources and Environment Vocational and Technical College,Lanzhou 730000,China;3.Suzhou Sheng Nano Technology Co.,Ltd.,Suzhou Jiangsu 215123,China)
Aiming at the problem that The zero voltage and scale factor will change when the MEMS accelerometer of single-axis inclinometer proceed Repeated power on,can not correct zero voltage and scale factor by turntablein the field environment.this paper derives the calibration model of the single-axis inclinometeraccording to the installation error of the MEMS accelerometer and the output model,and on this basis,a rapid calibration method for single-axis inclinometer is proposed,and the experimental method was used to verify the method by using the MEMS single-axis inclinometer developed by the laboratory and the upper computer prepared by LabVIEW software,experiments show that The rapid calibration method can quickly and accurately correct the drift of the MEMS accelerometer zero and scale factorto ensure the accuracy of the inclinometer and has good engineering practice significance.
single axis inclinometer;MEMS accelerometer;LABVIEW;rapid calibration
10.3969/j.issn.1004-1699.2017.12.010
项目来源:国家自然科学基金项目(51575500);高等学校中青年拔尖创新人才支持计划项目
2017-06-07修改日期2017-07-28
V241.62
A
1004-1699(2017)12-1839-06
兰洋(1991-),男,汉族,四川成都人,硕士研究生,主要研究方向为MEMS惯性传感器应用及导航算法研究等,Lane9241001@163.com;
李杰(1976-),男,教授,博士生导师,主要研究方向为微系统集成理论与技术,惯性感知与控制技术,组合导航理论,计算几何与智能信息处理等,Lijie@nuc.edu.cn。
