半转翼飞行器二分量升力测试装置设计与研究
2017-12-23钱爱文张玉华
钱爱文,李 彪, 张玉华
(1.河海大学文天学院 机械系,安徽 马鞍山 243031;2.合肥工业大学 机械工程学院,安徽 合肥 230009;3.安徽工业大学 机械工程学院,安徽 马鞍山 243031)
半转翼飞行器二分量升力测试装置设计与研究
钱爱文1,李 彪2, 张玉华3
(1.河海大学文天学院 机械系,安徽 马鞍山 243031;2.合肥工业大学 机械工程学院,安徽 合肥 230009;3.安徽工业大学 机械工程学院,安徽 马鞍山 243031)
为验证一种新式半转翼飞行器试验模型升力的大小,设计了一种新型二分量升力测试装置,解决了现有升力测试装置成本昂贵、结构复杂及适应性差的问题。基于ADAMS软件建立了二分量测试装置静态分析模型,并对测试装置进行了静态分析,分析结果表明了测试装置力学模型建立的正确性;通过ADAMS软件建立了二分量升力测试装置的动态分析模型,采用adams软件对测试装置进行了动态分析,得到测试装置固有频率与动态输出结果,为半转翼飞行器电机转速的选择提供了依据,同时奠定了后续实验的基础。
半转翼飞行器;试验模型;二分量升力测试装置;动静态性能
引言
扑翼飞行器[1-3]是通过模仿昆虫或鸟类振翅运动而设计的飞行器,它具有原地或小场地即刻起飞,自由悬停、急速转向[4-5]等特点,这些特点使得微型仿生扑翼飞行器在仿生机械领域占有重要地位。但是现在的微型扑翼飞行器大多停留在对翼型外形的仿生上,并且仿生机械的尺寸与被模仿动物的形体相近,无法大型化,其原因在于扑翼飞行器的运动形式——振翅是一种“不对称的摆动”,这种摆动会产生很大的惯性力,导致扑翼飞行器无法实现大型化。
有鉴于此,在半转机构[6]的基础上,设计一种新型的飞行器——半转翼飞行器。此飞行器将不对称的摆动转化为连续的转动,模仿鸟类和昆虫的上挥与下拍,产生类似延时失速、尾涡捕获、旋转环流与Weis—Fogh运动的效果,以此获得高升力,使扑翼飞行器的大型化成为可能。大型化代表飞行能力强,而飞行能力的衡量标准是升力,因此,测量半转翼飞行器的升力非常重要,但是半转翼飞行器是一种新型飞行器,没有针对它的测试装置,所以在扑翼飞行器的测试装置中寻求设计思路和方法。
目前,扑翼飞行器的升力测试装置由风洞和测试天平[7-9]组成,模型固定在测量天平上,测量天平置于风洞中,可以测量其升力。应用最广泛的测量天平是风洞天平和应变天平,但是机械天平结构复杂,制造费用大,研制周期长;应变天平中的应变片的粘贴过程复杂,同时,外部环境对应变天平的影响大,导致测试结果不准确。并且这两种天平一般适用于风洞测量,而且是静态测试,不适合自然环境测量和动态测试,因此提出一种测试装置——二分量升力测试装置。基于力传感器的二分量升力测试装置既可以测量升力又可以测量水平力;既可以静态测试,也适用动态测试;既可以在风洞中测量,也能够在自然环境中测量。相对于机械天平、应变天平等测量天平,具有结构简单,制造方便,适用性广等优点。
1 测试模型
基于半转机构建立的半转翼飞行器三维模型如图1所示,模型左右对称,电机通过齿轮机构将动力传递给传动箱,保证左直传动箱、右直传动箱转一周,同侧叶片转半周。右直传动箱与左直传动箱旋转方向相反,用来模仿鸟类和昆虫的上挥与下拍。半转翼飞行器的物理样机如图2所示。

图1 半转翼飞行器模型1.叶片;2.左直传动箱;3.电机;4.右直传动箱;5.叶片轴
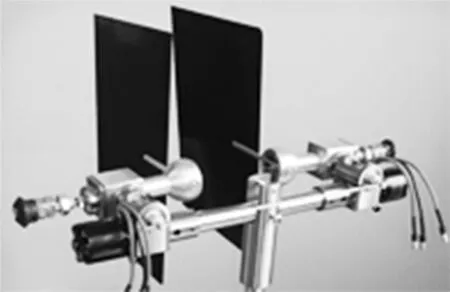
图2 半转翼飞行器试验模型物理样机
2 测试原理
在加工二分量升力测试装置之前,需对其测试原理进行分析,以便得到所需的求解量——升力和水平力的计算公式。图3为二分量升力测试原理简图,4个拉压传感器通过连接装置连接在底座上,半转翼飞行器试验模型通过压紧装置和支撑杆连接,支撑杆、法兰与十字形支撑架连接,十字形支撑架与传感器上部连接。
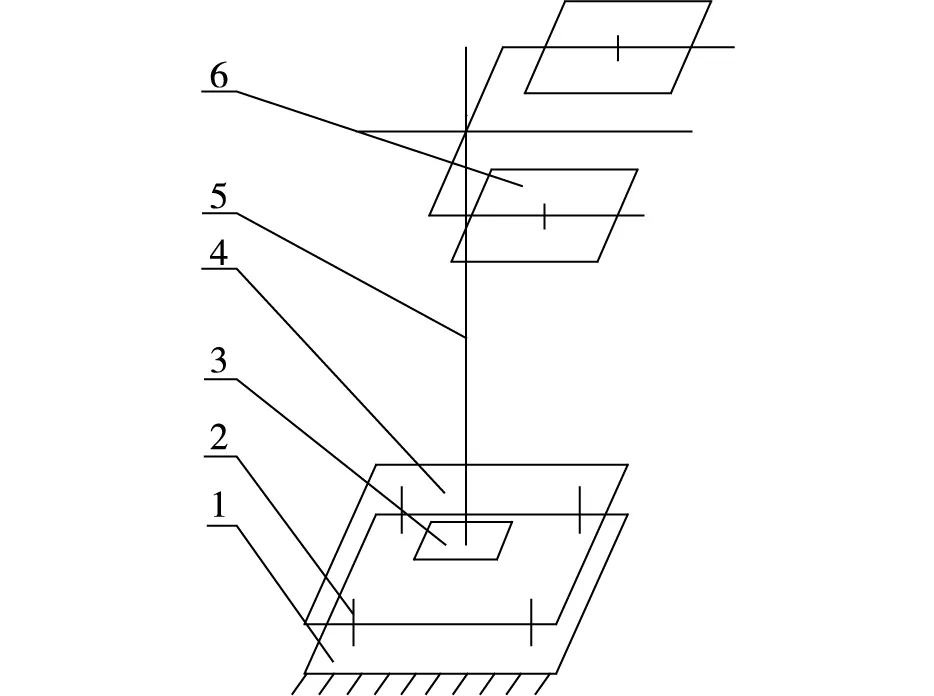
图3 二分量升力测试原理简图1.底座;2.拉压力传感器;3.法兰;4.支撑架;5.支撑杆;6.半转翼飞行器
根据测试装置示意图建立其数学模型,由于后续半转翼试验模型使用的是双叶片,所以建立双叶片模型,通过力学模型求解水平力、升力和侧向力。
由于模型左右对称,且左直传动箱与右直传动箱旋转方向相反,其侧向力相互抵消。双叶片测试原理如图4,其中b)是双叶片受力图,a)图是将双叶片上的受力点移到叶片与测试装置的安装点。

a) b)图4 测试装置计算图a)双叶片受力点移至安装点 b)双叶片受力图FS—升力;FH—水平力;MS—升力附加力矩;l—总高;l1—叶片横向轴线与对称轴线距离;l2—叶片纵向轴线与安装轴线距离;F1—传感器1测试值;F2—传感器2测试值;F3—传感器3测试值;F4—传感器4测试值;G—重力;Fh1—传感器1受到的水平力;Fh2—传感器2受到的水平力;Fh3—传感器3受到的水平力;Fh4—传感器4受到的水力;a—传感器1、2距离底座纵向轴线距离;b—传感器3、4距离底座纵向轴距离;c—传感器2、3距离底座横向轴线距离;d—传感器1、4距离底座横的距离
测试装置在无风条件下的力学分析如下:
(1)
(2)
最终完成测试装置的设计,如图5所示。

图5 测试装置三维模型
3 二分量升力测试装置模型性能
为保证以后实验的顺利进行,对测试装置动静态性能进行研究,由于单叶片测试模型的侧向力无法抵消,不研究其升力的大小。因此在双叶片测试模型的基础上,建立其虚拟样机模型,在没有外界干扰的情况下分析其动静态性能。
3.1 二分量升力测试装置静态性能
二分量升力测试装置由压紧装置、支撑杆等部分组成。在PROE中建立二分量升力测试装置的装配模型,并将建立的三维模型导入ADAMS软件中。在导入过程中用弹簧代替传感器。由于是对测试装置进行静态分析,将除十字形支撑组件以外的零件之间添加固定副,十字形支撑组件与地面之间通过弹簧连接。如图6所示。

图6 测试装置虚拟样机模型
因为将传感器作为弹簧处理,所以需要弹簧的刚度(传感器的刚度)。用以下步骤求解传感器刚度。
(1)将传感器固定在底座上,使用游标卡尺记录传感器负载为零时,传感器到底座的距离。
(2)使用三个5N的砝码,依次将三个砝码轻放在传感器上,并分别测量记录三次传感器上部距离底座的距离,如表1所示。

表1 力与位移对应表 (单位:mm)
对离散点进行拟合,得到力与位移函数关系式y=20.833x-0.625,y代表力,x代表位移,拟合直线如图7所示。得到弹簧刚度为20.833N/mm。

图7 力随位移变化曲线
将弹簧参数设置完成后,对测试装置进行静态分析,得到四个传感器的所受力值如图8所示。

图8 四个传感器静态受力
根据图8所示,四个传感器所受的合力为29.834N,即物体的质量为2.9384kg,与使用PROE软件计算的质量2.94kg基本相符,误差在5%以内,验证了数学模型的建立是正确的。
3.2 二分量升力测试装置动态性能
研究测试装置的动态性能主要是研究其固有频率。通过adams软件计算其固有频率。
由于二分量升力测试装置是一个复杂的系统,如果直接将测试装置三维模型导入到ADAMS中,导致模型约束施加复杂,运算困难,因此为了运算简单,对整个系统进行简化,将传感器简化为弹簧,同时由于半转翼飞行器是低频振动,将十字形支撑组件及其上的标准件简化成一刚性质量块a;法兰和支撑杆的焊接组件及压紧装置简化成刚性质量块b;半转翼飞行器简化成刚性质量块c。
在ADAMS 中,任何刚体构件的特性只与质量、质心位置、惯性矩阵、约束关系有关,与刚体的外形、几何尺寸没有关系,因此使用简单的模型并输入质量、质心位置及转动惯量来模拟测试装置[10]。根据PROE软件将十字形支撑组件及其上的标准件质量、质心位置、惯性矩阵求出,数值输入到刚性质量块a上。同理将刚性质量块b、c的质量、质心位置、惯性矩阵输入,而刚性质量块a、b、c之间的连接使用无质量的梁连接,质量块d代表地面,质量块d与地面之间加固定副。如图9所示。
从动力学角度可知,任何机械振动根据产生原因分为 3 种:自由振动、强迫振动和自激振动,其中自由振动是在系统平衡状态被破坏后由弹性恢复力维持的振动,其频率就是系统固有频率;强迫振动是由外界持续激振力引起的振动;自激振动则是由系统本身产生交变力激发的振动[11]。

图9 测试装置虚拟样机模型1.质量块d;2.质量块a;3.无质量梁;4.质量块b;5.无质量梁;6.质量块c
在ADAMS中调用vibration模块,打开模态分析对话框,选择static,进行自由振动分析,得到测试装置各阶模态,如表2所示。

表2 测试装置固有频率
从表中看出测试装置共有六阶模态,与系统有六个自由度相对应,其中1-3阶为低阶模态,4-6阶是高阶模态。其中垂直振动的固有频率为26.329,振型如图10。弯曲振动振型为图11,其频率为17.497。

图10 垂直振动动画

图11 弯曲振动动画
使用软件求出测试模型的固有频率后,再次使用adams软件分析输入与输出之间关系,得到4个传感器的输出曲线,验证测试装置在实验过程中波形是否会发生突变。主要过程是对质量块6处施加理论升力大小,观察4个传感器输出曲线,此时传感器所受力是静态时传感器所受重力值与升力的合力,需要去除传感器在平衡位置所受重力,得到4个传感器所受升力大小与时间的关系,如图12、13、14、15所示。
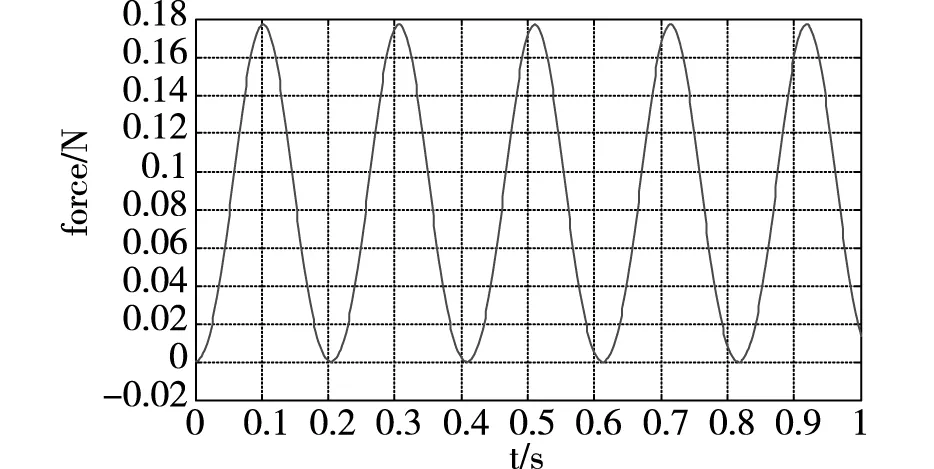
图12 传感器1受力随时间变化关系
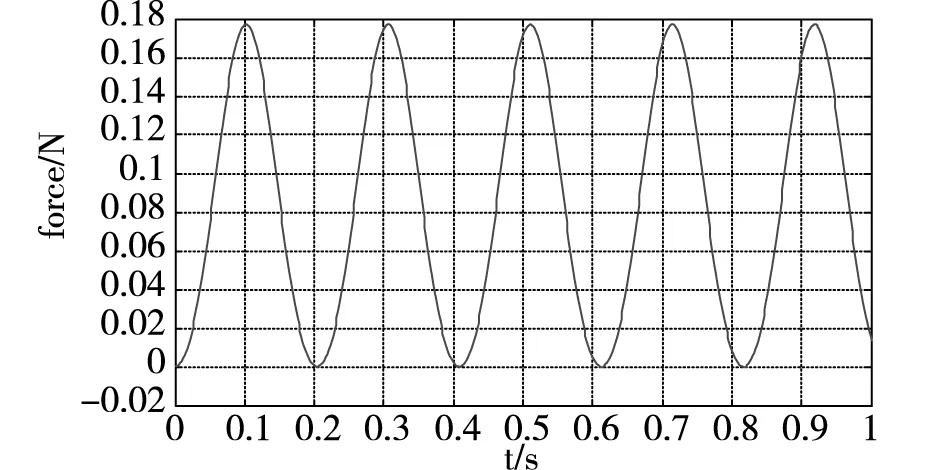
图13 传感器2受力随时间变化关系

图14 传感器3受力随时间变化关系

图15 传感器4受力随时间变化关系
在得到4个传感器受力随时间变化曲线后叠加,并与理论值进行对比,得到图16。

图16 4个传感器曲线叠加
由图16可知,仿真值与理论值相符,可以看出经测试装置后输出的波形不会发生突变,说明力学分析模型中的传感器所受附加反力对仿真结果不会产生影响。
最终建立其物理样机如图17所示。在后续实验中采用的电动机转速为3.64r/s与4.9r/s,发现后续实验过程中未出现共振情况。

图17 测试装置物理样机模型
4 结论
(1)本文基于半转翼飞行器试验模型,设计一种新型二分量升力测试装置,相对于应变天平而言,具有结构简单,制造方便,适用性广等优点。
(2)通过对二分量升力测试装置的动静态性能研究,验证了测试原理数学模型建立的准确性;得到了测试装置的固有频率,为电机转速的选择提供了依据,为后续实验提供了理论支持。
[1]牟晓蕾, 孙茂. 食蚜蝇悬停飞行时的气动特性[J]. 北京航空航天大学学报, 2012, 38(17): 1-6.
[2]Bos Frank M., Lentink D., Van oudheusden, et al. Influence of wing kinematics on aerodynamic performance in hovering insect flight[J]. Journal of Fluid Mechanics, 2008,594(1): 341-368.
[3]Sudhakar Y., Vengadesan S. Flight force production by flapping insect wings in inclined stroke plane kinematics [J]. Computers & Fluids, 2010, 39(4): 683-695.
[4]Hoang Vu Phan, Quoc Viet Nguyen, Quang Tri Truong, et al. Stable vertical takeoff of an insect-mimicking flapping-wing system without guide implementing inherent pitching stability [J]. Journal of Bionic Engineering, 2012, 9(4): 391-401.
[5]Dudley R.Thebiomechanicsofinsectflight:form,function,evolution[M]. Princeton University Press, Princeton, 2002: 100-150.
[6]邱支振.半转机构:构成·特性·应用[M]. 合肥: 中国科学技术大学出版社, 2011: 20-30.
[7]解亚军, 叶正寅, 白静, 惠增宏, 等. 微型飞行器测量天平设计与风洞试验[J].实验流体力学, 2006, 20(1): 24-27.
[8]邵立民, 宋笔锋, 熊超, 杨淑利. 微型扑翼飞行器风洞试验初步研究[J]. 航空学报, 2007, 28(2): 276-280.
[9]张亚锋, 宋笔锋, 袁昌盛, 吉国明. 微型扑翼飞行器升力特性研究[J]. 空气动力学学报, 2008, 26(4): 520-522.
[10]赵丽娟,徐涛,刘杰. 基于ADAMS/Vibration的轧机垂直振动模型的研究[J]. 系统仿真学报, 2006,18(6): 1566-1599.
[11]刘静, 李郝林,等. 基于ADAMS / Vibration的轧辊磨床测量装置振动特性仿真[J]. 机械设计, 2010, 27(12): 30-33.
DesignofTwo-componentLiftTestingDeviceforHalf-turnWingLift
Qian Aiwen1, Li Biao2, Zhang Yuhua3
(1. Department of Mechanical Engineering, Wentian College, Hehai University, Ma’anshan, Anhui 243031, China; 2. School of Mechanical Engineering, Hefei University of Technology, Hefei, Anhui 230009, China; 3. School of Mechanical Engineering, Anhui University of Technology, Ma’anshan, Anhui 243031, China)
In order to make large-scale flapping wing aircraft, a new kind of half-turn wing aircraft is designed by means of semi-rotating mechanism and bevel gear transmission mechanism. a new two-component lift test device is fabricated, and the mathematical model of the test principle is established. This study solves the problem that the existing lift test device is expensive, the structure is complex and the adaptability is poor. Based on ADAMS software, a static analysis model of two-component testing device is established. The static analysis of the test device is carried out. The results show that the mathematical model of the test principle is correct. The dynamic analysis model of the two-component lift test device is established by ADAMS Software. The ADAMS /vibration module is used to analyze the test device dynamically, and the natural frequency of the test device is obtained, which provides the basis for the selection of the rotational speed of motor for the half-turn aircraft and the foundation of the follow - up experiment.
half-turn wing aircraft; test model;two-component lift testing device; dynamic and static performance
ClassNo.:V211.7DocumentMark:A
宋瑞斌)
钱爱文,硕士,助教,河海大学文天学院机械系。研究方向:仿生机械,机械系统设计仿真(CAD/CAE/VE),汽车现代设计方法。李彪,在读博士,合肥工业大学机械工程学院。研究方向:机械系统设计仿真(CAD/CAE/VE),内燃机。张玉华,博士,教授,安徽工业大学机械工程学院。研究方向:新型机构设计理论及应用,机械系统设计仿真(CAD/CAE/VE),新型机械装备关键技术研究与开发。
河海大学文天学院校级科研项目重点(项目编号:WT16015ZD)。
2096-3874(2017)12-0028-06
V211.72
A
