混合型模块化多电平换流器的模型预测控制方法*
2017-12-21雷彪周耀杨兴武
雷彪,周耀,杨兴武
(上海电力学院,上海200090)
0 引 言
近年来,随着电力电子技术的发展,多电平变换器得到了越来越多地研究和应用。模块化多电平换流器作为一种新型的多电平电压源换流器因其具有容量易扩展、易模块化设计、谐波含量低以及灵活的功率调节能力等特点被广泛地应用于长距离柔性直流输电、无功补偿、可再生能源发电并网等高压大功率场合,具有广阔的应用前景。由于MMC诸多有利特性,因此MMC的拓扑结构、控制方法与调制策略、子模块电容电压平衡及环流抑制等相关方面成为国内外学者深入研究的热点之一[1-5]。
传统模块化多电平换流器每相由上、下两个桥臂组成,每个桥臂包含N个相同的半桥型子模块,其输出相电压的电平数可达到为2N+1[6]。文献[7]提出一种新型MMC的拓扑结构,其在传统MMC的每个桥臂上增加1个H桥模块,可使输出电平数达到4N+1。对于混合型拓扑的模块化多电平换流器,传统控制方法是采用基于PI控制器的双闭环矢量控制策略与基于载波叠加的PWM调制策略,实现对系统功率与直流侧电压的控制[8-10]。其中,引入基于PI控制器的电压均衡环节实现子模块电容电压平衡与H桥模块电压稳定,并由基于PI的电流解耦控制器抑制环流。该方法控制过程的调节时间相对较长,延时会严重影响控制器的性能。此外,系统对控制器参数比较敏感且参数整定过程复杂,参数设计结果的好坏对系统性能有直接的影响。
模型预测控制[11-15]能够消除换流器所引起的非线性影响且无需考虑参数整定,使系统的控制结构得到简化。本文结合子模块电容电压排序算法与H桥模块控制算法,提出一种基于模型预测控制的分层控制策略。该方法通过建立相对应的指标函数对交流侧电流、环流与子模块电容电压进行分层控制,从而确定各子模块与H桥模块的开关状态。与传统方法相比,该方法原理简单、无需考虑复杂的参数整定、易于数字化控制实现且可使系统具有优越的动静态性能。最后在Matlab/Simulink中搭建了混合型模块化多电平逆变器的仿真平台,仿真结果验证了所提控制策略的有效性与正确性。
1 混合型MMC的数学模型
混合型模块化多电平换流器的拓扑结构如图1所示,每相上、下两个桥臂均由N个相同的半桥型子模块(sm1~N)与一 H桥模块(smH)级联构成。

图1 混合型三相MMC拓扑结构Fig.1 Hybrid topology of three-phase MMC
图1中,esj、ij分别表示j(j=a,b,c)相交流侧电压与电流;Lf表示换流电抗器;R表示交流侧电阻;L表示交流侧电感;C表示模块电容;直流侧电压为Vdc,半桥型子模块电容电压为Vdc/N,H桥模块电容电压为子模块的一半。
由于混合型MMC为三相对称结构,对任意相分析可得到单相等效电路,如图2所示。由基尔霍夫电流定律可得:
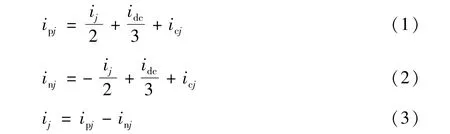
式中ipj、inj分别表示上、下桥臂电流;idc表示直流侧电流;icj表示桥臂环流。
结合式(1)与式(2),即得到环流表达式:


图2 混合型MMC单相等效电路Fig.2 Single-phase equivalent circuit of hybrid MMC
由基尔霍夫电压定律可得:
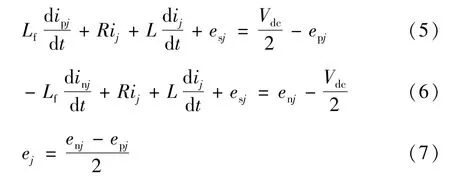
式中ej表示各相输出电压;epj、enj分别表示上、下桥臂的端口电压。
结合式(3)、式(5)与式(6)可得:
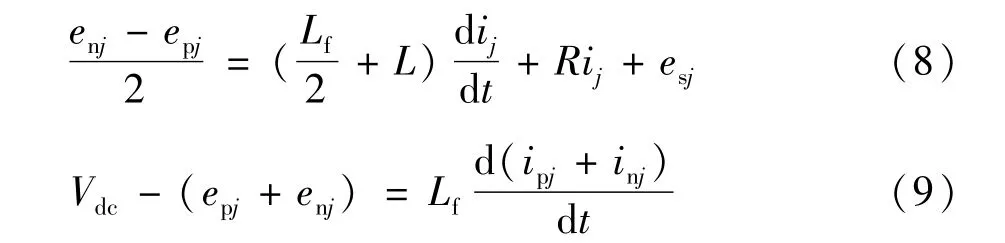
结合式(3)、式(8)与式(9),得到交流侧电流与环流的动态方程:
式中Leq=L+Lf/2;idiffj=icj+idc/3,表示桥臂内部的不平衡电流。
2 混合型MMC的控制策略
2.1 模型预测控制
模型预测控制的基本原理是通过指标函数评估系统性能与期望之间的差距,选取使指标函数值最小的开关状态,从而实现控制目标。模型预测控制结构图如图3所示,分层控制策略的步骤如下:
(1)检测交流侧电流并构建其预测模型;
(2)定义指标函数G1,选取交流侧电流控制环节的模块投入数目;
(3)结合H桥模块控制算法,确定H桥模块的开关状态以及等效投入数目;
(4)检测不平衡电流并构建其预测模型;
(5)定义指标函数G2,结合(2)的选取结果,选取经环流抑制环节后的模块投入数目;
(6)结合(5)的选取结果与H桥模块等效投入数目,得到最终子模块的投入数目,并根据子模块电容均压策略确定子模块的开关状态。

图3 模型预测控制结构图Fig.3 Block diagram of the model predictive control
2.2 交流侧电流控制
假设换流器的模块电容电压均衡稳定时,子模块输出Vdc/N与0两种电压,H桥模块输出±Vdc/2N与0三种电压。在实现2N+1电平输出时,上、下桥臂的模块投入数目及各相输出电压如表1所示。

表1 开关状态对应的输出电压Tab.1 Output voltages corresponding to switch states
表1中,npj和nnj分别表示上、下桥臂的模块投入数目。H桥模块等效为±1/2个半桥型子模块。
当输出电平数为4N+1时,则输出相电压ej的范围表示为:
设采样时间为Ts,采用欧拉公式得到t+Ts时刻交流侧电流的表达式:

式中epj(t+Ts)与enj(t+Ts)分别表示上、下桥臂的输出电压预测值;ij(t)表示t时刻的交流侧电流值;ij(t+Ts)表示交流侧电流预测值;esj(t+Ts)表示电网电压预测值,当Ts足够小时,近似认为esj(t+Ts)=esj(t)。
将交流侧电流指令值设为ij*(t+Ts),建立交流侧电流的指标函数:

通过评估不同电平下的指标函数值大小,选取G1值最小时的输出电平,实现对参考电流的最优跟踪,则t+Ts时刻上、下桥臂的模块投入数目取为npj*与nnj*。本文控制策略的输出电平取为2N+1,则npj*与nnj*取值范围如表1所示。
2.3 环流控制
根据式(11)所示的环流动态方程,采用欧拉公式得到t+Ts时刻的不平衡电流表达式:

式中idiffj(t+Ts)表示不平衡电流预测值;idiffj(t)表示t时刻的不平衡电流值。
由式(7)、式(10)与式(11)可知,输出相电压由上、下桥臂的端口电压差值确定,对epj与enj加减相同的补偿电压对交流侧电流控制没有影响,但会影响环流抑制效果。因此,将环流离散模型修正为:

根据桥臂结构,设补偿电压有三个电平,则得到epdiffj和endiffj的表达式:
式中epdiffj与endiffj表示上、下桥臂增加的补偿电平,当各模块电容电压均衡稳定时,epj与enj的值相等。
当级联子模块的数目较多时,可将补偿电压的取值范围扩展为更多电平,即能够得到更好的环流抑制效果。
桥臂不平衡电流包括直流分量与环流分量,控制不平衡电流需尽可能地抑制环流。取环流控制的指令值为3,建立环流的指标函数:

通过比较不同补偿电平下的指标函数值大小,选取G2为最小值的补偿电平,得到最佳环流抑制效果。经过环流控制环节,t+Ts时刻上、下桥臂的模块投入数目为与其中,与分别表示在最佳补偿电平时上、下桥臂等效增加或减少投入的模块数目。
2.4 H桥模块电容电压控制
交流侧电流控制选取的上、下桥臂模块投入数目为n或n-1/2。首先,对交流侧电流控制环节选取的模块投入数目进行判断,若为整数,则无需H桥模块参与;若非整数,则需H桥模块参与输出。其次,根据直流侧电容器的充放电特性,依据桥臂电流方向与H桥模块电容电压的大小确定H桥模块的输出状态。
H桥模块不同开关状态对应的输出电压与电容充放电状态如表2所示。表中的smj表示H桥模块的输出电压极性,smj/2可表示H桥模块的等效投入数目。其中,m取p或n。
H桥模块控制算法描述如下,参照表2,当H桥模块电容电压小于额定值,此时H桥模块需要充电,如果该桥臂电流为正时,则H桥模块输出正向电压;如果该桥臂电流为负时,则H桥模块输出负向电压;当H桥模块电容电压大于额定值,此时H桥模块需要放电,如果该桥臂电流为正时,则H桥模块输出负向电压;如果该桥臂电流为负时,则H桥模块输出正向电压。

表2 H桥模块不同开关状态对应的输出电压与电容状态Tab.2 Output voltages and capacitor states corresponding to different switching states of H-bridge module
2.5 子模块电容电压平衡控制
通过交流侧电流控制、环流控制与H桥模块电容电压控制,得到各相上、下桥臂最终需要投入的子模块数目。将上、下桥臂需要投入的子模块数目分别计为Npj与Nnj,其表达式为:

当子模块切除时,模块电容电压在下一个控制周期内保持不变。当子模块投入时,t+Ts时刻上、下桥臂的模块电容电压表示为:

式中ucij(t)表示t时刻的子模块电容电压;imj(t)表示t时刻的桥臂电流值。
由此,建立子模块电容电压控制的指标函数:

子模块电容电压平衡控制的具体实现过程如下:计算t时刻所有子模块的指标函数值,对上、下桥臂各子模块的指标函数值进行降序排列,选取G3值最小的子模块在下一时刻投入,直到此桥臂被选取投入的子模块数目达到Npj或Nnj。对于被选择投入的子模块,输出上开关管导通、下开关管关断的开关状态;而对于其余子模块,输出上开关管关断、下开关管导通的开关状态。
3 系统仿真分析
为验证本文所述控制方法的有效性与可行性,在Matlab/Simulink中搭建了每个桥臂由4个半桥型子模块与1个H桥模块级联构成的混合型三相模块化多电平逆变器的仿真平台,整体系统的拓扑结构图如图1所示,仿真系统参数如表3所示。
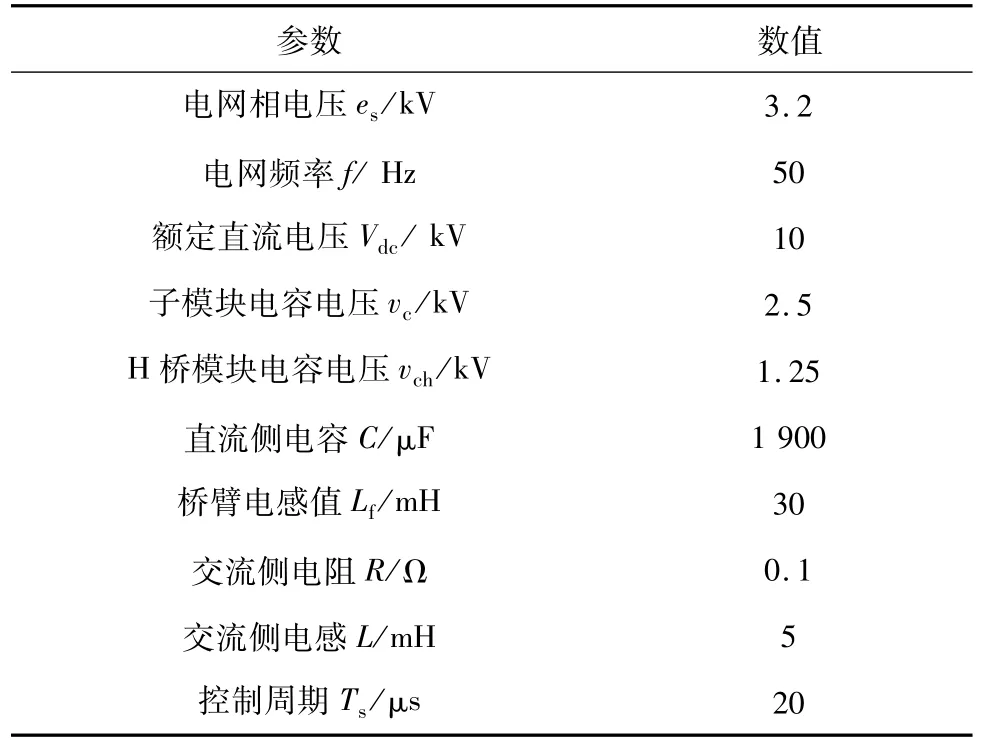
表3 仿真系统参数Tab.3 System parameters for simulation
3.1 静态性能测试
图4表示系统静态响应的仿真结果。在稳态情况下,系统有功功率指令值取0.55 MW,无功功率指令值取0 MVar。图4(a)表示A相交流侧电流,通过分析可得其谐波畸变率仅为0.34%,具有良好的交流侧电流控制效果;图4(b)、图4(c)分别表示A相的不平衡电流、环流与上、下桥臂电流,图4(d)表示A相上桥臂电流的频谱图,THD值为3.16%,二次成分含量较少,取得了良好的环流抑制效果;图4(e)与图4(f)分别表示A相上、下桥臂子模块与H桥模块的电容电压,可以得到,模块电容电压均处于均衡稳定状态,验证了子模块电容电压平衡策略与H桥模块控制算法的有效性。

图4 静态响应仿真结果Fig.4 Simulation results under static response
3.2 动态性能测试
图5表示系统动态响应的仿真结果。有功功率指令值为0.55 MW,在t=0.6 s~0.7 s时加入斜坡信号,使有功功率指令值变化为-0.55 MW,以测试系统的动态性能。图5(a)表示A相交流侧电流,输出电流的稳定性良好;图5(b)表示系统的功率响应,输出功率能够跟踪功率参考值的变化;图5(c)、图5(d)分别表示A相的不平衡电流、环流与直流侧电流,不平衡电流始终控制在idc/3上下,具有良好的环流抑制效果;图5(e)、图5(f)分别表示 A相上、下桥臂子模块与H桥模块的电容电压,子模块与H桥模块的电容电压保持稳定。可以得到,所提控制方法在有功功率反转下仍可有效实现交流侧电流跟踪控制、子模块电容电压平衡与H桥模块电容电压稳定以及环流抑制。
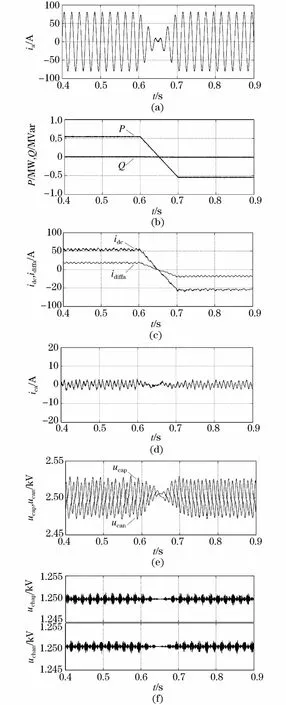
图5 动态响应仿真结果Fig.5 Simulation results under dynamic response
4 结束语
针对混合型拓扑的模块化多电平换流器,提出一种基于模型预测控制的分层控制策略,结合子模块电容电压排序法与H桥模块的控制算法,通过建立相应的指标函数对交流侧电流、环流与子模块电容电压进行分层控制,从而输出各子模块与H桥模块的开关状态。最后在Matlab/Simulink平台搭建了混合型模块化多电平逆变器的仿真模型,仿真结果表明该方法能够实现交流电流控制、子模块电容电压平衡控制与H桥模块电容电压稳定、环流抑制,并且使系统具有良好的动静态性能。与传统控制方法相比,该方法原理简单、无需考虑复杂的参数整定且易于数字化控制实现。