一种基于数字图像处理的灼热丝火焰监测系统
2017-12-20邹德臣王慧武丛超
邹德臣,王慧武,丛超
(哈尔滨电工仪表研究所,哈尔滨150028)
0 引 言
电子电器零部件在故障或过载等条件下可能达到过高的温度而存在引起着火的危险。灼热丝试验就是模拟过载电阻之类的热源或点火源在短时间内对样品施加热应力,通过观察和测量被测材料在规定时间内的燃烧情况,来评定样品的着火危险性。灼热丝试验是检验电工电子产品中绝缘材料耐燃性能重要的试验项目。灼热丝试验主要是为了测试绝缘材料在试验条件下,起燃后的火焰高度和持续时间,其试验方法和合格判定在国家标准GB 5169.10,GB 5169.11,GB 5169.12,GB 5169.13中明确规定。目前的测量火焰高度和持续时间的测量方式是肉眼观测标尺刻度,从而估算火焰高度,由于肉眼分辨力有限而且易受实验环境干扰,所以测量的误差较大[1-2]。
灼热丝火焰是在标准大气压下,由固体绝缘材料和该绝缘材料经受高温而固气相变产生的可燃气体作为燃料,空气作为助燃气体的条件下形成的。火焰的本质是放热反应中反应区周边空气分子加热而高速运动,从而发光的现象,根据温度和亮度的差异可分为内层、中层和外层。在灼热丝火焰检测和火焰高度测量中,需要测量的是灼热丝上缘与火焰外层顶部之间的垂直距离,然而由于灼热丝火焰外层火焰温度极高其光谱集中在紫外区,这使得人眼不能对其进行分辨,而实际能观测到的只是光谱集中在可见区的内焰部分,所以无法准确测量灼热丝火焰的实际高度[3-6]。
在灼热似火焰图像中,外层火焰的温度和亮度都是最高的,虽然其光谱集中在不可见区,但可以通过提取火焰图像中的亮度特征,并结合轮廓提取技术将需要测量其高度的外层火焰提取出来,进而实现对灼热丝火焰高度的准确测量。就是基于上述思路,提出了一种基于数字图像处理方法和轮廓提取技术的灼热丝火焰高度测量方法,并综合图像采集系统设计了一种实时、高准确度的灼热丝火焰检测系统,而且通过实验结果验证了此系统的有效性和高准确度。
1 灼热丝火焰监测系统结构说明
所设计的灼热丝火焰监测系统主要为了实现两种功能:(1)测量灼热丝火焰持续的时间长度;(2)准确测量(误差范围在)某一时刻灼热丝火焰的高度。为了实现以上功能,本系统设计了图像采集与传输模块、基于STM 32F407型单片机的数据处理模块和灼热丝火焰高度拟合曲线输出部分。此检测系统实际工作时首先通过图像采集系统获取灼热丝实验图像,然后通过通信端口将采集的数据传输给数字图像处理模块,此环节根据灼热丝火焰图像的主要噪声干扰和火焰图像轮廓特征,并为了兼顾系统的实时性和准确度,综合应用了灰度处理、亮度范围截取、中值滤波去噪和Canny边缘提取方法,以完成对灼热丝火焰外层轮廓的完整、准确提取,进而实现对灼热丝火焰高度的高精度测量。最后根据图像采集起始时刻和采样间隔标定采样时间,绘制火焰高度拟合曲线,其中火焰高度不为零的采样点的持续时间即为灼热丝火焰持续时间。本系统的图像采集模块每秒钟可采集10帧图像,所以通过本系统得到的火焰持续时间的误差不会大于0.1 s。监测系统的结构框图如图1所示。
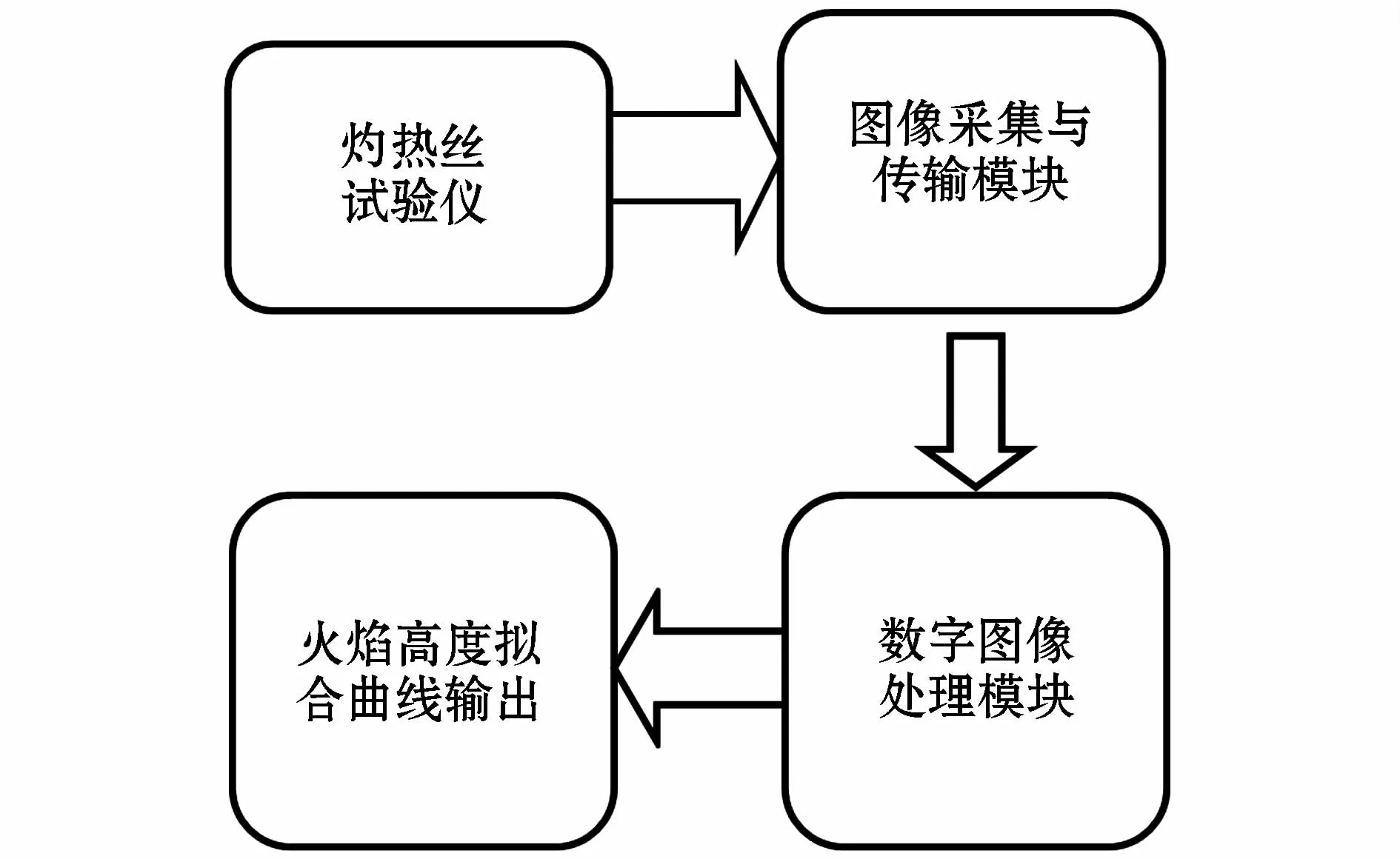
图1 灼热丝火焰监测系统框图Fig.1 Block diagram of glow-wire flame monitoring system
2 基于图像处理和识别技术的火焰高度测量
2.1 灰度处理及亮度范围截取
在火焰图像中,火焰部分相对于背景部分有着明显的亮度差异,为了提取出火焰的这一重要特征,并据此实现对火焰高度的测量,本文首先应用Matlab软件对图像进行了灰度处理,将由图像采集模块获得的R.G B色彩影像三原色数值转化为亮度值,进而使图像中的每一像素由一个二维数组表示,这样在保留了火焰图像主要特征的同时进也方便应用Matlab数字图像处理技术进一步对数据进行处理。将原图像的颜色值灰度值为:

式中R、B、G分别是原图像中的红、蓝、绿颜色分量值。经过灰度处理后的每一个像素都只含有进行了0~255之间的量化后的亮度值信息。需要进行提取用于火焰高度测量的外层火焰其亮度值最大,如图2所示,为了保留此部分图像需要对灰度图像进行了灰度范围截取,Matlab中的imadjust函数可实现此功能,其基本原理为:选取原图像中亮度值处于某一范围的像素,并将此部分像素的亮度值重新扩展到0~255。

图2 灰度处理前后的灼热丝火焰图像Fig.2 Images of glow-wire flame before and after gray processing
2.2 滤波
在灼热丝火焰图像获取的过程中,外部电磁干扰、图像采集系统和存储设备的内部机械振动和传输介质的缺陷会产生一些噪声干扰,称为椒盐噪声。这种干扰会严重影响图像质量和后续边缘提取的准确度,为了获得高质量的图像进而准确测量火焰高度等信息,需要对火焰图像进行滤波处理。目前常用的噪声滤波方法主要有低通滤波法、带通滤波法、平滑滤波均值滤波和中值滤波等方法[7-9]。在以上述各方法中对于所要设计的火焰图像检测系统而言,中值滤波方法具有以下几点明显优势:(1)算法原理简明、运算速度快;(2)对于由叠加白噪声和行为叠加噪声组成的椒盐噪声的滤除效果明显;(3)在有效滤除噪声的同时能完整保留图像边缘。综合上述特点和仿真对比结果,文中采用中值滤波方法进行滤波处理。图3中为不通滤波方法的滤除噪声效果,通过对比可以发现,中值滤波方法的图像去噪效果最佳。

图3 不同滤波方法的图像去噪效果对比Fig.3 Comparison of image denoising based on different filteringmethods
2.3 基于Canny算子的图像轮廓提取
目前可用以图像轮廓提取的方法主要有:Sobel算子、Roberts算子、Prewitt算子、Laplace算子和Canny算子,相比之下Canny具有以下明显优势:(1)能完整提取出涵盖图像边缘的轮廓;(2)具有较强的抑制噪声作用;(3)产生虚假边缘概率低。综上优点选用了Canny进行火焰图像轮廓提取。Canny算子的边缘检测基本原理:首先用高斯滤波器平滑图像,待处理的数字图像的二维高斯函数为:

将图像 f(x,y)与 G(x,y)的偏导作卷积可得:

A(x,y)反映了图像在像素点(x,y)处的边缘梯度强度,θ是图像(x,y)点处的梯度法向矢量。
综合 A(x,y)、θ可以得到全局的梯度,其中的具有局部梯度极大值的像素点即是图像的边缘部分,Canny算子通过非极大值抑制的方法来确定图像边缘。此方法可简述为:以每一像素点为中心点画四条等间隔的梯度线,并将此点与各梯度线上的相邻点比较,若为极大值则保留不为极大值责令其为0。经过非极大值抑制后保留下来的点即为图像边缘点,准确地将这些点连接即为图像轮廓。
为了可以完整准确提出图像轮廓的同时又可以不出现虚假边缘,Canny算子选择了双阈值算法,其中高阈值约为低于值得2倍,具体检测步骤为:分别用两个阈值对经非极大值抑制后的图像进行检测,得到两组图像边缘检测结果,其中高阈值的检测结果出现虚假边界的概率很低,但轮廓点较少,低阈值的检测结果则相反。在保留高阈值检测结果中的全部像素点基础上,并对于在高中出现的点再在低中与之相邻的8个点中根据梯度方向进行选择,最后将符合条件的点进行连接就是基于Canny算子得到的图像轮廓。图4为应用Sobel算子、Prewitt算子、Laplace算子和Canny算子对灰度图像进行轮廓提取的结果,通过对比可知Canny算子所提取的火焰图像轮廓的清晰度和完整度都是最佳的。
2.4 灼热丝火焰高度的计算
首先通过简单的搜索程序确定火焰轮廓中横坐标最小点 a1(x1,y1)和纵坐标最高点 a2(x2,y2)的像素,其中a1即为灼热丝上的某一点,y1则为火焰的基准高度点纵坐标,a2即为火焰外层的最高点,y2则为火焰外层最高点的纵坐标。火焰高度的基准点是根据国家标准中规定的:由灼热丝上缘至柔和的弱光下观察可见火焰顶部之间的垂直距离。

图4 采用不同算子的火焰轮廓提取结果Fig.4 Extract results of the flame profile using different operators
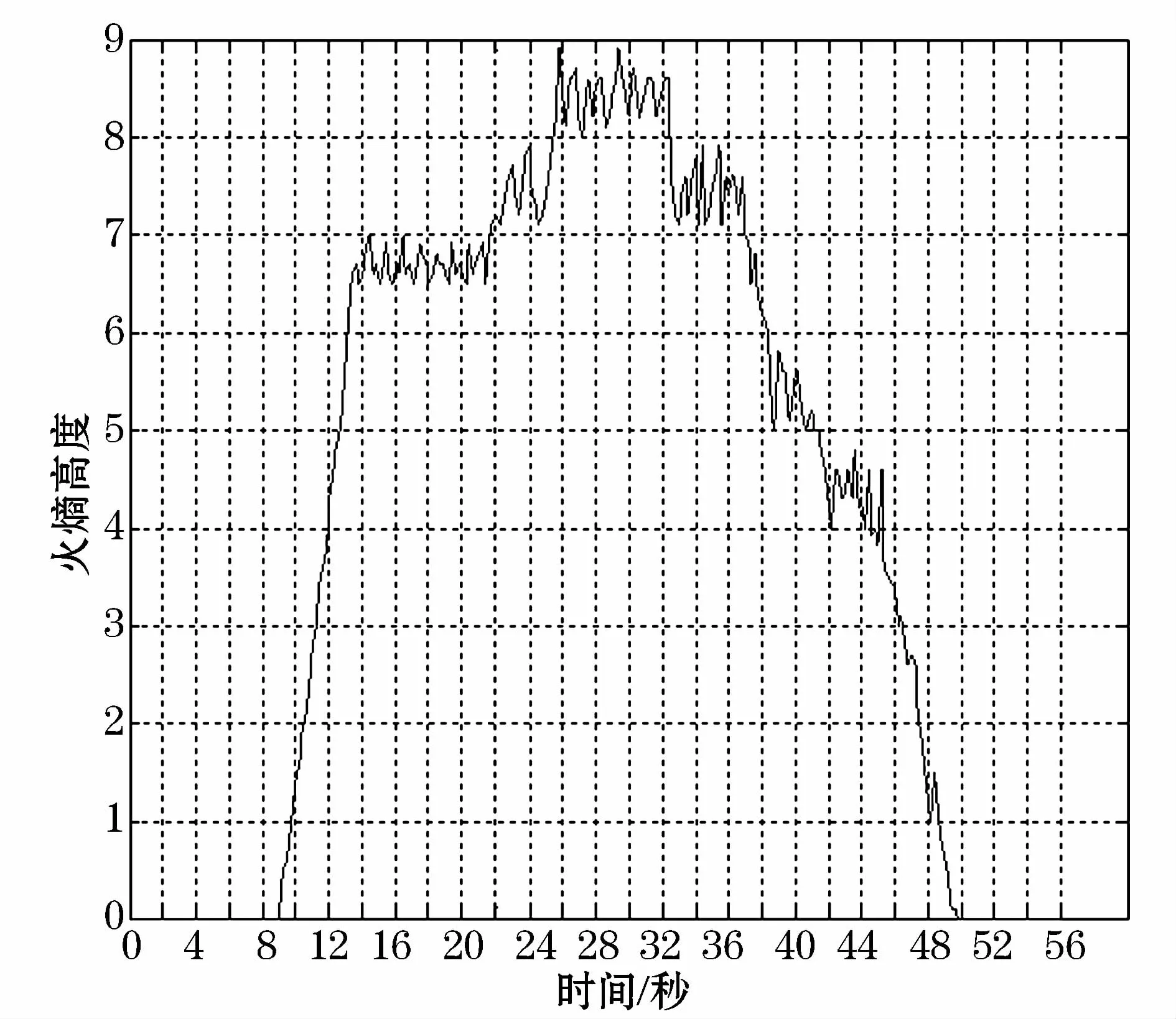
图5 灼热丝火焰高度检测结果Fig.5 Themonitoring results of the height of the glow-wire flame
根据摄像机数字成像原理,设图像采集系统的图像放大倍数为k,火焰高度方向总的像素值为m,火焰实际高度计算式为:

图5为应用文中所设计的火焰图像检测系统对实际灼热丝火焰的检测结果,观察图中测量结果可知此次灼热丝试验的火焰开始时刻为9.0 s、截止时刻为49.6 s,持续时间为40.6 s,火焰的最大高度出现在26.0 s为8.9 cm。由以上试验结果可知本系统可以准确测得火焰的起止时刻、持续时间和灼热丝燃烧过程中某一时刻的火焰高度。
3 结束语
为了实现对灼热丝火焰高度和持续时间的准确测量,提出了一种基于多种数字图像处理技术的灼热丝火焰监测系统。本系统根据需要测量的外层火焰的亮度特征,综合应用了灰度处理、亮度映射、中值滤波和Canny算子等方法进行火焰轮廓准确提取,进而实现对火焰高的准确测量与监测。文中通过Matlab仿真实验对本系统各环节所选用方法对火焰图像处理的适用性进行了验证。最后用一组实际灼热丝试验的火焰监测结果验证了所提出的监测系统可以实现对灼热丝火焰的实时准确监测。
