基于瞬时无功功率理论的谐波检测和抑制的模型参考自适应控制系统*
2017-12-20崔浩舒朝君陈言
崔浩,舒朝君,陈言
(1.四川大学 电气信息学院,成都 610065;2.国网四川省电力公司乐山供电公司,四川 乐山 614000)
0 引 言
随着电力系统中负荷使用的多样化,如整流器、高频荧光灯镇流器、变压器、调速驱动装置(ASD)、电机、电弧炉等[1]大量产生谐波电流的非线性负载的使用,使得对公共连接点(Point of Common Coupling,PCC)处电能质量扰动敏感的电力设备无法正常工作,严重影响了电力系统的正常运行。
目前,常用的谐波检测方法主要有基于Fourier变换的谐波检测法,快速傅里叶变换(Fast Fourier Transformation,FFT)对稳态谐波的检测精度高,但是对暂态谐波和采样信号不同步的谐波检测会产生频谱泄露和栅栏效应[2];基于神经网络的谐波检测法[3],在很大程度上依赖大量训练样本,虽然检测精度高但时常伴有频谱泄露;基于瞬时无功功率理论的谐波检测法[4-7],是传统的谐波检测方法,但性能受低通滤波器的限制,因此要在不同的使用场合选择精度优先或动态性能优先的低通滤波器。
文章根据瞬时无功功率理论,在Matlab/Simulink平台上搭建仿真模型,对滤波器的选型问题从新的角度做了详细说明,实现了基于瞬时无功功率理论的谐波检测,并根据检测结果设计可调增益的模型参考自适应控制系统实现对实际模型参数变化的自适应调整,以提高系统对谐波检测的鲁棒性。
1 基于瞬时无功功率理论的谐波检测
1.1 谐波检测原理
在对称的三相电网电压下,三相电压的瞬时值为:
式中U为对称三相电源电压有效值。基于瞬时无功功率理论的ip-iq谐波电流检测的原理图[8]如图1所示。
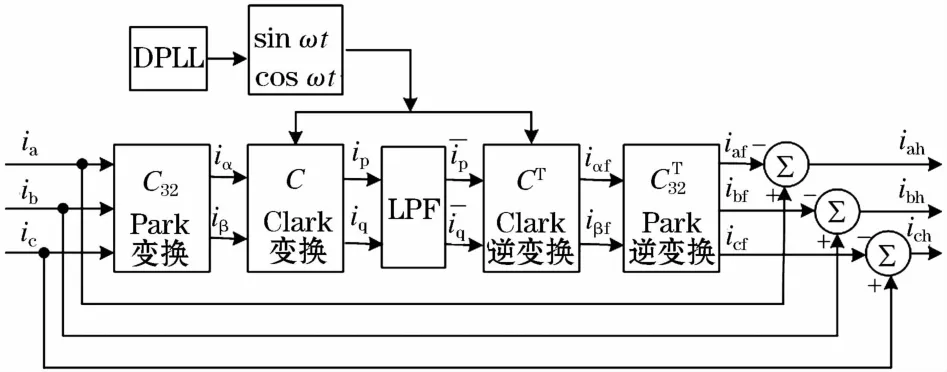
图1 谐波电流检测原理图Fig.1 Principle diagram of harmonic current detection
图1中由数字锁相环(Digital Phase Locked Loop,DPLL)取自与ua同相位的参考正弦信号。负载端的对称三相电流经Park变换到正交的两相电流iα、iβ(C32是 abc对称坐标系到 αβ正交坐标系的变换矩阵),将正交的两相电流经Clark变换到旋转的两相电流ip,iq(C是αβ正交坐标系到pq旋转坐标系的变换矩阵),ip、iq经低通滤波器后得到对应的直流分量接着进行Clark逆变换、Park逆变换后得到三相基波电流值,对称三相负载总电流减去三相基波电流即得纯谐波电流。
其中,C32和C分别为
1.2 低通滤波器的选型和设计
低通滤波器的合理选择直接影响到谐波检测的精度,应根据谐波补偿的具体场合来选择合适的滤波器类型和参数。Matlab/Simulink仿真结果表明[9],同样阶数的滤波器,当截止频率选择较低时,Butterworth型滤波器的检测精度最高;当截止频率选择较高时,Elliptic滤波器的检测精度最高;而Bessel型滤波器动态响应过程最快。在实际应用中,应综合考虑检测精度和动态响应速度等因素来选择合适的滤波器类型和参数。由于要从旋转两相负载电流中得到直流成分以滤除交流成分,故截止频率应当很低,选择Butterworth型低通滤波器。
由于截止频率越小,谐波电流检测精度越高,动态响应过程越慢;截止频率越大,动态响应虽然变快但部分低次谐波无法滤除,影响谐波检测精度。因此,滤波器阶数和截止频率的选择是衡量谐波检测精度的关键。利用如图2所示的基于瞬时无功功率理论的谐波检测仿真模型[10],为了获得滤波器的阶数N和截止频率ωc,对截取0.02 s后的基波电流作FFT分析,结果如表1、表2所示。其中N为滤波器阶数,fc为滤波器截止频率。

图2 谐波检测的仿真模型Fig.2 Simulation model of harmonic detection

表1 N=2时基波电流0.02 s后的FFT分析结果Tab.1 FFT results of fundamental current after t=0.02 swhen N=2

表2 N=3时基波电流0.02 s后的FFT分析结果Tab.2 FFT results of fundamental current after t=0.02 swhen N=3
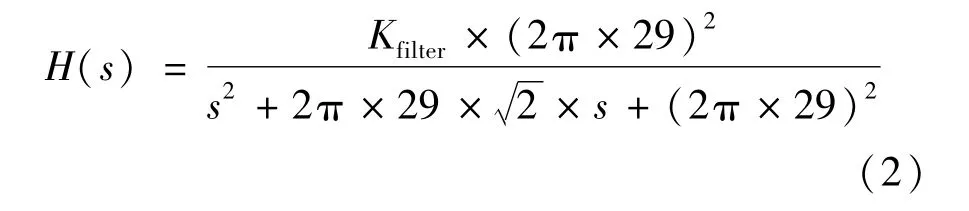
权衡各次谐波含量和总谐波畸变率(Total Harmonic Distortion,THD),文章选择THD最低时的阶数N=2、截止频率fc=29 Hz的 Butterworth低通滤波器。传递函数为:
1.3 仿真实验
仿真实验条件:式(1)中U=220 V,三相整流桥直流侧的阻感负载R=10Ω,L=10-3H,三相整流桥交流侧的线路电抗 jXL=j×50×10-3Ω,LPF选择Kfilter=1、ωc=2π×29 rad/s的二阶 Butterworth低通滤波器。负载端三相电流,检测的基波电流和谐波电流分别如图3~图5所示。

图3 负载端三相电流波形Fig.3 Three-phase load current waveform

图4 三相基波电流波形Fig.4 Three-phase fundamental current waveform

图5 三相谐波电流波形Fig.5 Three-phase harmonic current waveform
2 模型参考自适应控制系统设计[11]
为了有效克服实际模型内部参数变化和外部扰动对谐波检测的影响,根据所期望的性能指标设计一个参考模型,使得实际模型输出在有限时间内快速跟踪参考模型输出。由瞬时无功功率理论提取出的基波电流设计可调增益的模型参考自适应控制系统,控制框图如图6所示。

图6 控制系统框图Fig.6 Block diagram of control system
2.1 控制器设计
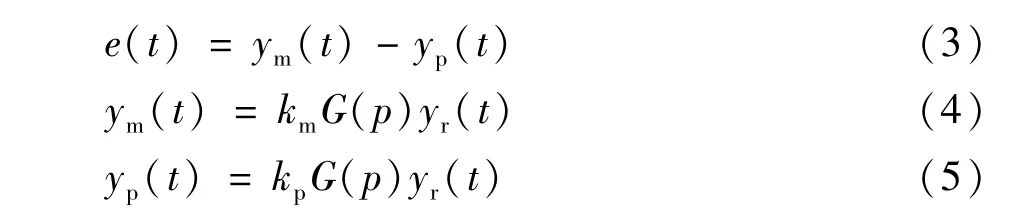
设参考模型输出与实际模型输出之差为:
被控对象G(s)的慢时变参数为kc(t),引入性能指标调整控制器参数,使得达到极小值。
采用梯度下降法,使得可调增益kc(t)沿着性能指标J(kc)的负梯度方向变化,即:

由式(3)~式(5)得:

由式(6)、式(7)得可调增益自适应律为:

系统控制律为:

2.2 仿真实验
根据式(8)、式(9)和图6所示的控制系统框图搭建如图7所示的Simulink仿真图,由于谐波检测本身为开环系统因而不存在稳定性问题。其中K=γ·kp/km为自适应增益且为正数,参考模型中km=1、Kfilter=1。

图7 可调增益的模型参考自适应控制系统Fig.7 Model reference self-adaptive control system of adjustable gain
参考模型是为了获得既定输出所设计的理想的、可靠的系统,可用计算机模拟或精度高的元件搭建。为了说明实际模型在外部开环增益kp变化和内部参数LPF增益改变时的自适应能力,在模型静态特性下设计了实际模型输出跟踪参考模型输出的实验。
(1)当实际模型开环增益kp=1.5时,调整参数K=0.025,三相基波电流的跟踪情况和跟踪误差如图8所示。
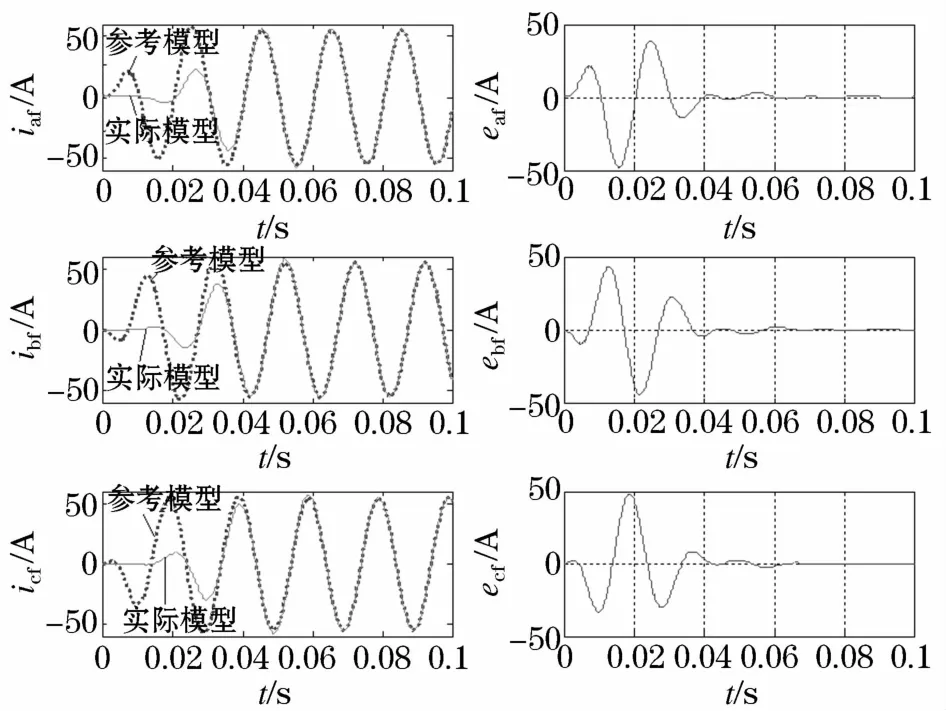
图8 三相基波电流的跟踪性能Fig.8 Tracking performance of three-phase fundamental current
由图8可知,由于外部参数变化,实际模型输出在0.04 s后完全跟踪参考模型输出,不受参数变化的影响仍然正常运行,提高了系统的抗扰能力。
(2)当实际模型内部参数kp=1、K′filter=5时,调整参数K=0.01,三相基波电流的跟踪情况和跟踪误差如图9所示。
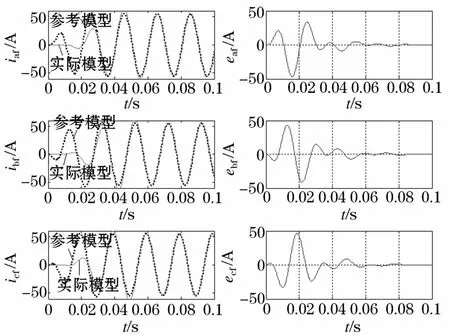
图9 三相基波电流的跟踪性能Fig.9 Tracking performance of three-phase fundamental current
由图9可知,由于内部参数的改变,约0.06 s后实际模型输出完全跟踪参考模型输出,与实验(1)相比需要增加一个基波周期(20 ms)的时间才能实现完全跟踪。
3 结束语
(1)文章在瞬时无功功率理论的低通滤波器选择上提出了一种基于基波电流分量FFT分析的方法,通过基波、各次谐波的含量和总的谐波畸变率对滤波器的阶次和截止频率折中选择。
(2)为了克服由于外部因素和内部参数改变对谐波检测精度的影响,提出了一种将模型参考自适应理论引入开环谐波检测系统,以实现实际模型的参数自调节,提高了谐波检测系统的鲁棒性。
(3)由于基于瞬时无功功率理论的谐波检测中低通滤波器的限制,约0.02 s后才能准确提取基波电流分量。相对于实际模型开环增益的改变,内部参数的改变需要更长时间的自适应调整。
