基于态势预测的无人机防相撞控制方法*
2017-12-19毛厚晨高文明甘旭升
毛厚晨,宋 敏,高文明,甘旭升
(空军工程大学空管领航学院,西安 710051)
基于态势预测的无人机防相撞控制方法*
毛厚晨,宋 敏,高文明,甘旭升
(空军工程大学空管领航学院,西安 710051)
针对无人机自主飞行过程中,受空中非协作移动目标威胁较大,且空中移动威胁存在高机动性的特点,提出一种预测移动威胁情况下的无人机防撞控制方法,该方法采用交互多模(IMM)算法预测移动威胁的运动状态,同时利用滚动时域控制(RHC)思想建立无人机运动控制模型,构造有约束目标函数,运用微分进化算法(DE)求解目标函数,获取最优控制量,输入控制模型,完成防撞机动控制。仿真结果表明,该方法可以有效解决空中多架航空器同时入侵的防撞问题。
无人机,防相撞控制,滚动时域控制,交互多模算法,微分进化算法
0 引言
无人机以优异的性能使其在军事、民用与通用航空领域,尤其是保证国土安全的潜在作用越来越受到重视。但由于无人机没有“感知—避让”能力,空中相撞事故频频发生[1]。
当前无人机空域运行主要是依靠路径规划实现防相撞。路径规划方法主要有Voronoi图法、启发式A*搜索法、人工势场法和蚁群算法等群智能算法。但是这类方法大多用于规避静态障碍物,而对于突然出现的移动障碍物不能做到有效规避。文献[2-4]运用MPC算法实现无人机飞行路径的实时规划,其中文献[2]提出了一种基于威胁状态预测的MPC算法来解决路径规划中出现移动威胁体的情况,但只考虑了单一入侵机情况,对于多入侵机没有进行研究。文献[3]考虑了多架入侵机的情形,但是未考虑无人机的机动控制量。文献[5]则在预测入侵机轨迹中只考虑了入侵机的单一运动模型,且未对本机的运动态势进行预测。
本文在文献[5]的基础上,改用交互多模算法(IMM),引入入侵机的多种运动模型,通过预测,获取入侵机位置状态;通过RHC算法建立我机控制模型,加入危险接近距离,构造优化目标函数,运用微分进化算法(DE)求解目标函数,得到一系列在线控制量来控制无人机进行机动避让,实现我机飞行中实时预测、实时避撞的目的,并以最小代价到达目标点。
1 防撞控制系统架构
通过机载传感器设备获取环境初始信息,分别用交互多模预测入侵机位置,滚动时域控制建模无人机运动模型,同时预测两机未来运动趋势,以此作为微分进化求解无人机控制量的依据,将控制量反馈输入无人机控制方程进行机动控制,完成避撞后进行下一步的态势感知,以此循环直至到达目标点。
无人机防撞控制系统架构图如图1所示。
2 运动威胁目标的轨迹预测
无人机通过机载探测设备或地基雷达获取目标的初始状态信息,将信息传入机载计算机系统,通过预测算法得出N步后的预测值,作为下步机动控制量的参考。
由于考虑到入侵机运行中可能出现的多种机动形式,本文采用交互多模(IMM)算法[6-7],算法由一组滤波器组成,每一滤波器对应于目标的不同运动状态,并且通过马尔科夫链来控制模型的转换。它能够耦合多种运动模型,能够较好地体现入侵机运动的不确定性。
状态方程为:
观测方程为:
由于航空器在不受外界环境影响的情况下,通常做匀速运动,在机动时,通常做匀速转弯运动,所以本文考虑两种模型,一是匀速模型,二是匀速转弯模型。其中,运动模型为:
匀速模型假设目标的加速度为零,转移矩阵F和噪声方差矩阵q分别为:
匀速转弯模型:给定常速度v和常转弯率w,则转移矩阵F和噪声方差矩阵q分别为:
3 防撞控制
3.1 无人机动力学模型
为了简化无人机运动模型,无人机不做垂直方向上的机动,仅考虑其横侧向运动,将三维航路飞行转换成在某一高度下二维平面航路飞行。不考虑无人机的气动性能,飞行状态等因素,将其简化为一个质点,只考虑其速度、航向、转弯角速度、加速度。同时,为了增加防相撞的针对性,只考虑动态威胁(主要为入侵飞机),不考虑地形,高大障碍物等静态威胁。同时设置无人机机载探测设备的探测区为360°,根据航空器飞行间隔规定以及防相撞要求,在探测区之内加入危险接近区,一旦出现危险接近即表示防撞失败。
首先建立飞行坐标系如图2所示。
我 UAV 当前位置坐标为(x0,y0),目标点坐标为入侵机位置坐标为
本文将状态量取为UAV在飞行过程中的位置信息,由转弯角速度的变化来控制飞行中航向角的变化,由加速度的变化来控制速度的变化。在图3所示的UAV飞行角度示意图基础上,选取简单飞机质点的运动学方程,建立离散化的预测控制模型如下所示。
其中,x,y表示航迹飞行位置坐标;s为当前路径点与下一路径点之间的步长;v是速度大小;ω是转弯角速度;Δt是当前点与下一航路点间的时间间隔。
3.2 基于滚动时域的避撞控制方法
3.2.1 滚动时域控制
在每一采样离散时刻,用系统的当前状态作为初始条件,在线求解一个有限时域开环最优控制问题,得到最优控制序列[8-9]。并在该时刻,仅取最优控制序列中的第一个控制信号实际作用到系统中。在下一采样时刻,重复以上过程。这个过程随着时间的推进反复滚动进行。
滚动时域控制的流程如图4所示。
3.2.2 目标函数构建
目标函数是算法实现的依据,可以验证规划算法的有效性。通过最小化目标函数来确定最优控制量,从而在下一时刻代入预测模型获得无人机的实时飞行航迹。
受无人机性能限制,应在满足约束的条件下,无人机在预测域内航程距离与预测端点到目标点距离之和最小为预测域P内航程,为预测端点到目标点距离。
同时要考虑到在飞行过程中始终保持足够的安全间隔dk,以防止与入侵机之间相撞,。另外,在无人机做出机动过程中考虑飞机的实际操控性能指标a,ω。所以构建如下优化问题:
3.3 基于微分进化的模型求解
微分进化算法是一种随机的并行直接搜索算法[10-12]。它从某一随机产生的初始种群开始,按照变异、交叉、选择等操作过程不断地迭代计算并根据每一个个体的适应度值,保留优良个体,淘汰劣质个体,引导搜索过程向最优解逼近。
其操作步骤如下:
1)初始化参数:种群规模大小N,交叉概率CR,终止迭代代数(Maxgen),缩放因子F;
2)染色体编码。在本文中,染色体由预测域内每个航路节点可能的控制量a,ω组成,基因的个数由预测域长度P决定,且用十进制数进行编码;本文染色体编码如图5所示。
5)选择操作。对于新产生的个体 ui,G+1,进行评价,计算其适应度,并根据以下准则决定是否选择新产生的个体。
4 仿真分析
为了验证该动态航迹规划方法的可行性和有效性,利用Matlab8.0进行了仿真分析。并设置初始数据如下:
1)移动威胁是不明入侵飞行器,且与我无人机在同一高度层,不考虑垂直方向,只做水平方向的二维机动。
2)观测系统为线性离散系统,系统误差及测量误差均为高斯白噪声,且观测变量相互独立;观测时间T=0.5 s,转弯速率w=0.067;由于是二维运动,所以IMM算法中只取两个卡尔曼模型滤波器,马尔科夫转移概率为。
3)无人机与环境等参数设置见表1:
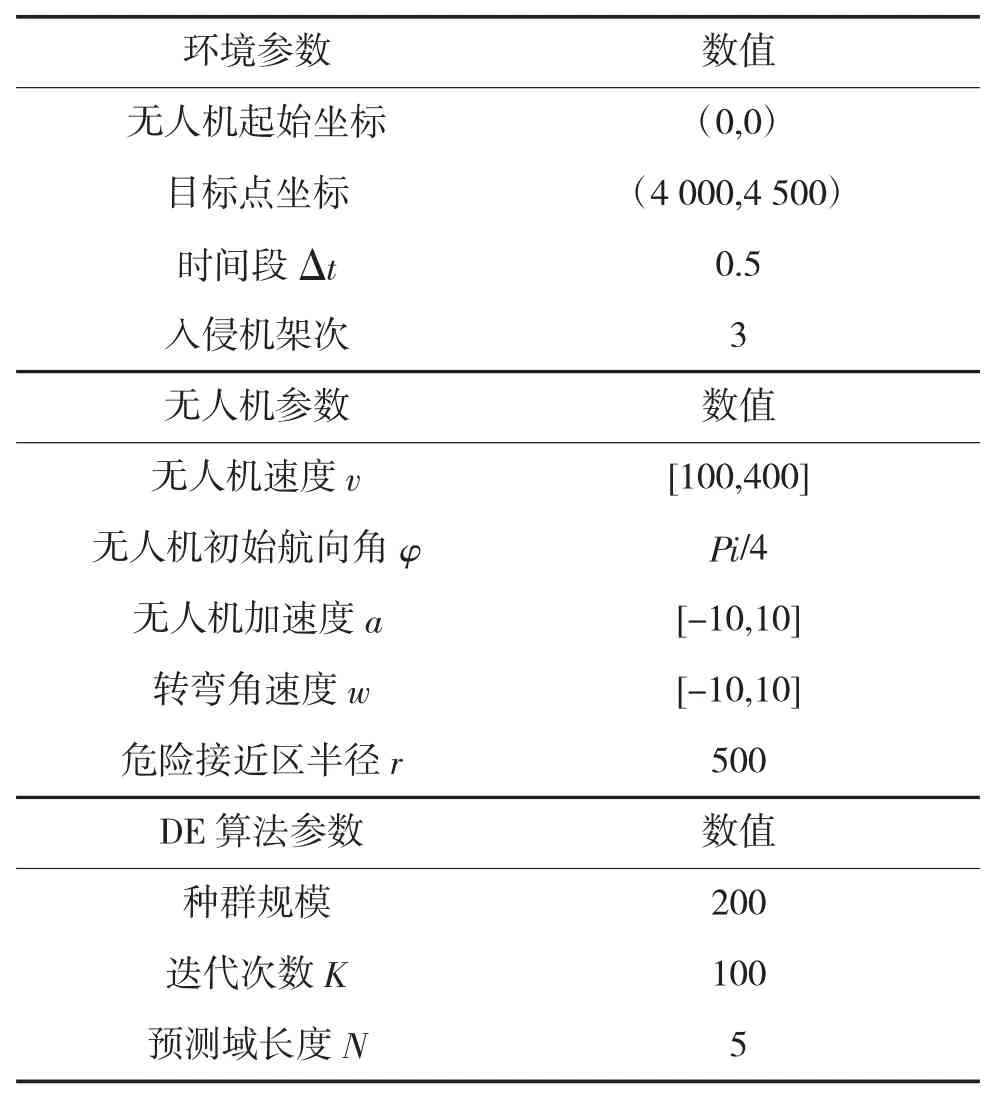
表1 参数设置表
为体现对比效果,在本文仿真条件下,使用本文方法与文献[5]方法进行比较。仿真结果如图6所示:
避撞效果对比见下页表2。
如图6所示为未采用防撞控制方法的无人机避撞过程,从图(b)中可以看出,入侵机已经进入我机的避撞区,表明在未采取防相撞控制方法下,没有对我机未来趋势进行有效预测并做出机动预判,虽然能躲避机动动作较小的入侵机,但是在入侵机数量增加,机动动作增大的情况下,无人机难以达到避撞效果。
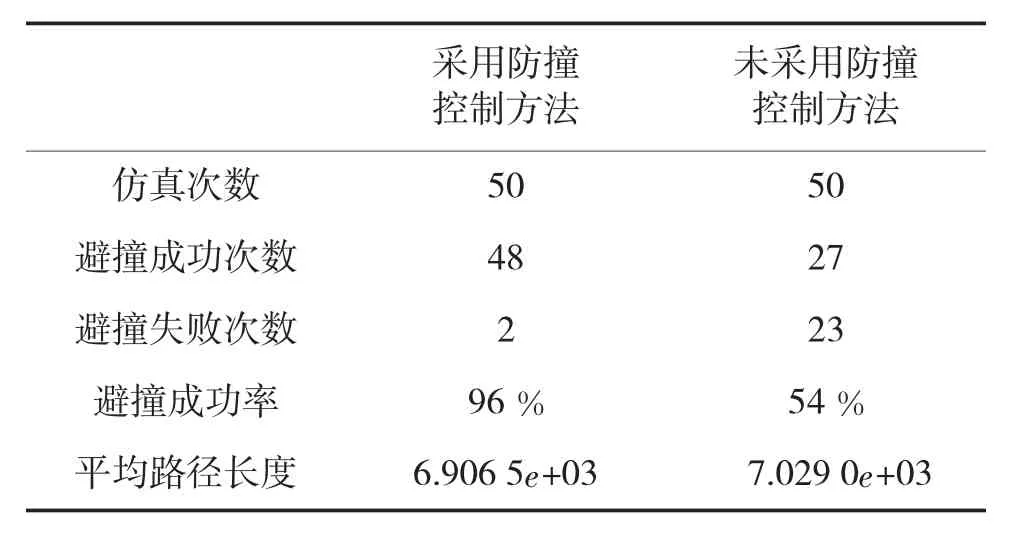
表2 避撞效果比较
图7(a)整体上体现了IMM算法对入侵机轨迹的跟踪预测效果,虽然在两次转弯即模型变换过程中,出现一定的预测偏差,但仍在可接受范围内。图7(b)仿真结果可知,在预测初期,由于获取的入侵机状态信息较少,故预测不稳定,有较大误差,随着获取的信息增多,对轨迹的估计愈加稳定,尤其是在入侵机转弯过程中仍能保持比较有效的预测。
从图 8(a)~ 图 8(e)中可以看出,本文防撞控制方法在面对多个运动威胁时,在考虑我机机动控制的基础上,通过对双方航空器未来趋势的不断滚动预测,可以有效实现实时的动态避撞,安全到达目标点。
表2是对两种方法各进行50次仿真的结果。采用防撞控制算法避撞率达到96%,远高于未采用防撞控制方法的54%;同时,对比成功避撞的平均路径长度,采用防撞控制方法的平均路径长度要优于未采用防撞控制的方法。
从以上仿真分析可以看出,采用基于预测的防撞控制方法能够实现较高的避撞率,更加安全地飞行,并缩短了飞行路径。
5 结论
针对突发移动威胁条件下的无人机防相撞问题,本文提出了一种面向移动目标规避的无人机防撞控制方法。该方法基于实时感知移动威胁源的位置信息,预测其运动趋势,建模我机控制方程,构建避撞目标函数,根据无人机机动性能限制,采用微分进化求解最优控制量,实现实时控制,在目标代价驱动下滚动前进到达目标点。通过仿真,证明该方法能够有效预测入侵机运动趋势,并实现空中实时避撞。
无人机防撞重在其“感知—避让”能力,本文提出了一种解决避让问题的方法,但是对于感知能力进行了理想化设置,实际上,机载感知设备有诸多性能限制。下一步需要将具体的感知设备与无人机的机动控制进行结合,才能更好地解决无人机防撞控制问题。
[1]牛轶峰,雷鑫,张国忠.无人机感知规避系统与技术发展现状[J].无人机,2013,25(2),17-21.
[2]任佳,高晓光,张艳.移动威胁情况下的无人机路径规划[J].控制理论与应用,2010,27(5):641-647.
[3]王绪芝.不确定环境下无人机航迹动态规划及仿真研究[D].南京:南京航空航天大学,2013.
[4]张胜祥.基于滚动时域MILP的小型无人机航迹规划[D].广州:华南理工大学,2009.
[5]陈侠,张婧,徐光延.移动威胁下的无人机三维航迹规划[J].上海交通大学学报,2014,48(10):1400-1406.
[6]方彦军,周亭亭,谭磊.基于交互式多模型算法的无人车车辆跟踪预测技术[J].武汉大学学报(工学版),2013,46(4):540-545.
[7]韩兴东,胡卫东,杨世海.应用交互多模(IMM)算法跟踪低空目标[J].火力与指挥控制,2003,28(5):48-52.
[8]NING X,ZHEN Y.On-line UAV route replanning based on model arithmetic control[C]//Proceedings of the 5th World Congress on Intelligent Control and Automation.Hangzhou:IEEE,2004,6:680-684.
[9]BLACKMAN S S,POPOLI R.Design and analysis of modern tracking systems[M].Norwood,MA:Artech House,1999.
[10]黄越.微分进化算法及其在无人机航迹规划中的应用研究[D].沈阳:东北大学,2009.
[11]STOM R,PRICE K.Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces[J].Journal of Global Optimization,1997,11(4):341-359.
[12]贾杰.微分进化算法研究与仿真实现[D].大连:大连理工大学,2015.
Controlling Method of UAV Collision Avoidance Based on Prediction of State
MAO Hou-chen,SONG Min,GAO Wen-ming,GAN Xu-sheng
(School of ATC and Navigation,Air Force Engineering University,Xi’an 710051,China)
During the autonomous flight,the Unmanned Aerial Vehicle(UAV)is threatened by the non-cooperative moving objects in the air.Because of the high mobility of moving objects,a controlling method for UAV collision avoidance based on the moving objects prediction is proposed in this paper.To predict the motion state of the moving threaten object,the Interactive Multiple Models(IMM)algorithm is adopted.The Receding Horizon Control(RHC)algorithm is used to establish the UAV’s controlling model,and to a constrained objective function.The Differential Evolution(DE)algorithm is applied to obtain the optimal control variables,which then will be added into the controlling model,and the controlling of collision avoidance maneuver is established in the end.The simulation results show that this method can solve the Collision Avoidance problem of multi aircrafts’invasion effectively.
unmanned aerial vehicle,collision avoidance controlling,receding horizon control,interactive multiple models algorithm,differential evolution algorithm
TP391.9
A
10.3969/j.issn.1002-0640.2017.11.06
1002-0640(2017)11-0025-06
2016-08-15
2016-10-23
国家自然科学基金青年基金资助项目(61503409)
毛厚晨(1991- ),男,江苏镇江人,硕士研究生。研究方向:空域规划与空中交通流量管理。
