轨道除沙车集沙铲功耗分析与形状优化
2017-12-18,,
, ,
(1. 北京铁路局 天津机务段,天津 300232; 2.石家庄铁道大学 工程训练中心,河北 石家庄 050043;3.石家庄铁道大学 机械工程学院,河北 石家庄 050043)
轨道除沙车集沙铲功耗分析与形状优化
李晨阳1,吴文江2,王振兴3
(1. 北京铁路局 天津机务段,天津 300232; 2.石家庄铁道大学 工程训练中心,河北 石家庄 050043;3.石家庄铁道大学 机械工程学院,河北 石家庄 050043)
基于离散元法,利用EDEM软件中的Hertz-Mindlin接触模型,研究沙子物理特性和集沙铲几何特点,建立基于EDEM软件单叶集沙仿真模型。分析了集沙铲转速为90 r/min,100 r/min,120 r/min时,沙堆沙粒能量的数值规律,计算出在额定工况下3种转速下所需功率分别4.24 kW,5.29 kW,7.46 kW。同时对定转速120 r/min下集沙铲叶片形状进行优化,通过仿真得到平板集沙铲以及集沙铲末端弧度半径分别为700 mm,500 mm,300 mm时的受力情况,分析后得到集沙铲末端弧度半径为500 mm时受力峰值最小,作用过程中受力较为均匀,所受冲量较小。
除沙车;集沙铲;单叶集沙模型;数值模拟
0 引言
随着中国铁路运输的飞快发展,越来越多的铁路线路铺设在了沙漠、戈壁等风沙频繁的地区,这些地区常常因风沙过大积沙埋没铁轨导致列车停运的事故,为此课题组研制出铁路除沙车,是专用于沙漠地区清除铁道线路积沙的养护设备。集沙铲是除沙车中与沙堆作用的主要构件,它的工作过程是切割沙堆并将其输送到除沙车后部。为了达到预定的除沙效果、充分利用除沙车动力,分析集沙铲与沙堆作用情况,优化集沙铲形状势在必行。
通常情况下机械-沙土使用接触模型方法多为:分析法[1]、经验法[3]、连续体数值法[3],但它们对于分析沙土等介质有着明显的不足[4]。采用DEM(Discrete Element Method)能够进行离散介质的静力学和动力学仿真,该方法由Cundall和Strack(1979)提出,基于显示颗粒的数值求解法,每个颗粒都看作是独立的个体进行仿真,应用牛顿第二定律作为描述粒子平移运动基本理论,应用通用旋转动力学作为旋转理论基础[5]。该方法能够充分考虑到沙土结构的复杂性和非线性流动状况,在研究散体介质方面有着明显的优势[6-7]。当前,国内外一些学者建立了土壤与机械之间的离散元接触模型,但多数仍旧停留在二维模型上,且应用的主要领域是推板实验和旋耕刀具等转速小、对颗粒的冲击力小的领域[8],而集沙铲与沙堆的优化过程建立在精确的沙土模型和三维机械模型的基础上,对沙粒子的速度影响大、产生的冲击较强。仿真的实验结果对于高速旋进机械如盾构、中速钻头等机械的离散元法研究有重要的价值。此外,对沙漠地区的干燥细小颗粒沙土的离散元模型进行了标定,确定了该沙土的离散元模型。
1 理论基础
1988年Fielke首次建立了低粘结度的沙土模型[3],DEM仿真证明了当土壤粘结度较小时(粘结强度小于6 kPa),在仿真结果上几乎和无粘结力的模型相同,由于集沙铲工作区域的沙堆属于粘结力很小的沙土质,因此确定了在仿真过程中选用Hertz-Mindlin(no slip)法进行仿真。
Hertz-Mindlin(no slip)能够精确计算粒子位置和时间的关系,其具体的计算模型已经定义和建立。
其法向接触力为
其切向接触力为

2 集沙铲与沙土接触模型
由于风沙地区沙子干燥、细小等特点,利用EDEM软件建立其沙土-机械接触模型,为了提高模拟集沙铲和沙堆接触模型的准确性,需要将材料参数和接触参数正确的标定,使用精确的集沙铲三维模型。
2.1 材料参数和接触参数的标定
1988年,Fielke建立了DEM的沙质土壤模型[3],提供了沙质土壤模型的主要参数。为了正确建立符合风沙地区沙质的模型,在借鉴Fielke模型的基础上,进行了沙土的实验标定和模型标定[4],如图1。
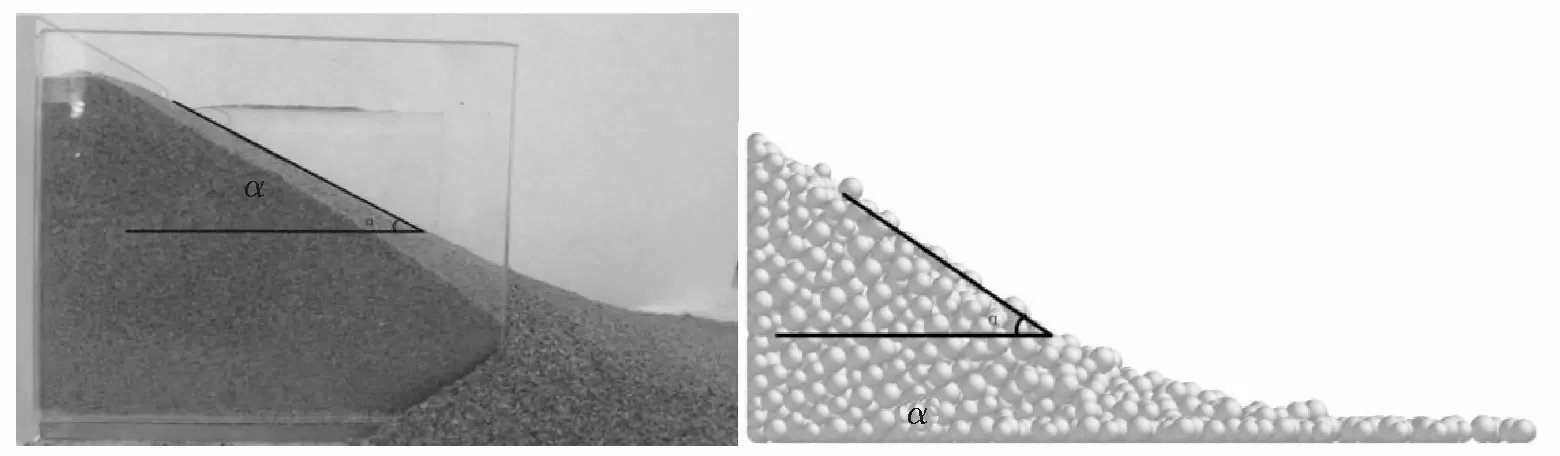
图1 参数标定与模型标定
通过实验和模型标定确定所需材料参数和物料间接触模型参数,如表1、表2。

表1 材料属性

表2 材料间的接触参数
2.2 集沙铲几何模型
集沙铲位于除沙车前端,除沙车结构如图2(a),集沙铲旋转前进收集铁路上沙子,将沙子送到车辆后部,再由排沙系统排出车外,行走系统提供向前动力,其运行前进速度0.8 m/s,为了降低转速,提高工作效率,集沙铲设计时采用多叶片轴辐式设计,主要结构包括主轴和集沙叶片两部分,集沙叶片上有贴合轨道断面的缺口,如图2(b)。
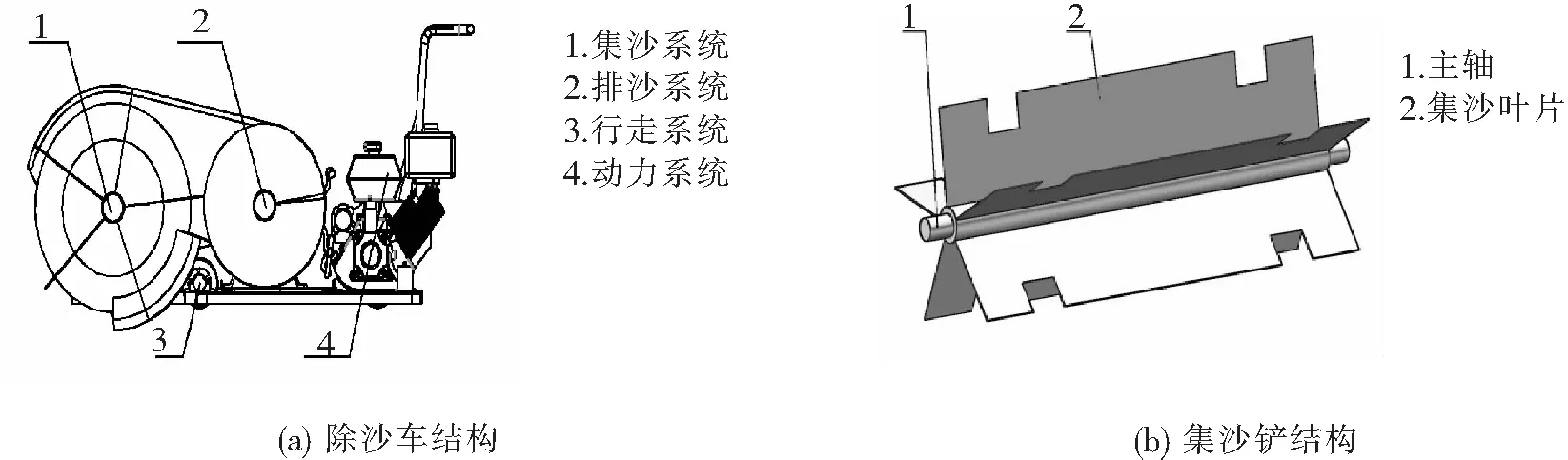
图2 除沙车及集沙铲机构示意图
3 集沙模型的建立和沙粒的数值规律分析
3.1 单叶集沙仿真模型建立
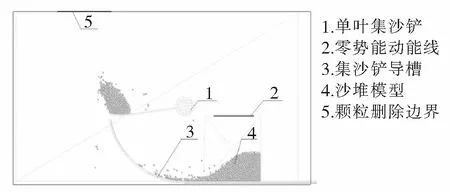
图3 单叶集沙铲仿真模型
为了简化计算和分析,在EDEM模型中做如下简化,如图3。
(1) 建立单叶片式集沙铲和导槽,其前进速度改为0.2 m/s。
(2) 集沙铲叶片宽度改为150 mm,沙堆模型定质量为10 kg,沙高为180 mm。
(3) 设定零势能动能线和颗粒删除边界。沙堆在零势能动能线处生成,下落堆积,质量为10 kg,堆积高度180 mm。集沙铲顺时针旋转并和导槽以0.2 m/s的速度匀速向前(除沙车样机集沙铲为4叶片,以0.8 m/s左右前进,为保证每铲集沙量一定,单叶集沙铲模型将速度减小4倍),集沙铲叶片与沙堆接触后将沙堆沿导槽刮起,沙堆被刮起高度超过沙粒删除边界后,沙粒被删除。集沙铲旋进直到将堆积的沙堆全部抛出,计算结束。
3.2 不同转速下沙堆的数值规律
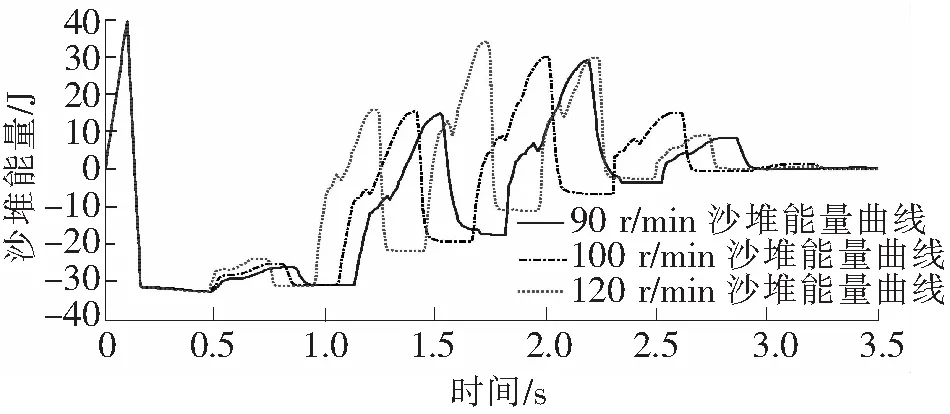
图4 不同转速下沙粒总能量曲线
模拟实验的颗粒半径在4~6 mm之间,颗粒数目在6 925左右。3组实验中,沙粒产生的速率和数量相同,3组实验集沙铲与沙堆相对位置固定,0.4 s时集沙铲开始以0.2 m/s速度进行旋进运动,模拟除沙车集沙系统的运动。通过仿真结果得到不同转速下沙粒总能量曲线如图4所示。
在0 s时刻未产生任何沙粒,沙堆的总能量为零。沙堆在零动能势能点产生,下降堆积静止,由于沙粒的下降使得沙堆在静止状态下总能量为负。0.4 s后集沙铲开始运动与沙堆作用,每次作用,都会使沙堆的总能量增加,集沙铲与沙堆分离后总能量保持平稳,一定时间后,飞出计算区域的沙粒的势能和动能减为零,致使沙堆的总能量突然减小。沙粒被抛出计算区域同时带走大量能量,但由于总沙量的减小,使得沙堆被作用后比作用前的总能量大,因此集沙的过程中,能量曲线在最低点起伏升高,到3.5 s时沙堆被清理完,总能量趋于零,沙堆的每一时刻的总能量都可以通过计算结果得出。
通过对沙堆的能量等数据的采集和计算,可以得到不同转速下单叶片模型集沙参数如表3。

表3 不同转速下单叶片模型集沙参数
根据不同转速沙堆获得能量求得限定工况下所需集沙铲功率如表4。

表4 不同转速下集沙铲集沙参数
根据表4可知,假定轨面上的沙堆积沙高度一定,沙堆分布均匀,因而使得每秒最大集沙量达到563 kg,且除沙车以0.8 m/s的车速前进时,当集沙铲转速分别为90 r/min、100 r/min、120 r/min时,所需的功率分别为4.24 kW、5.29 kW、7.46 kW,该数据为除沙车上的集沙铲动力分配提供了理论依据。
相同的叶片数目和转速下,前进速度不同使得单位时间内收集沙子质量不同,所以集沙铲所需功率发生变化,所需功率与增加的集沙质量成正比。
相同转速和前进速度下,叶片数目不同虽然每片叶片所收集的沙子质量变化,但由于主要功耗参数是根据集沙质量来确定的,因此这种情况下集沙质量不变功耗不发生变化。
3.3 定转速下集沙铲叶片的选型
在集沙铲的设计当中,集沙铲叶片与沙堆作用力较大,根据石家庄铁道大学工程训练中心所做集沙实验,集沙铲转速为120 r/min时,集沙铲叶片工作一段时间后明显变形。为了降低集沙铲对沙堆的撞击力,提高集沙铲的寿命,需对集沙铲叶片进行改进。在借鉴车床刀具形状的基础上,将集沙铲叶片末端由板状变为弧状,分别用EDEM对4种形状集沙铲进行了仿真实验,如图5所示,3种改进后的集沙铲形状,叶片圆弧半径分别为700 mm、500 mm和300 mm。
根据实验得到的4种不同形状集沙铲受力大小,取1~3.5 s工况下的参数绘制集沙铲受力曲线。
图6是板状集沙叶片与700 mm圆弧半径集沙叶片受力曲线对比,根据图线可知700 mm圆弧半径的集沙叶片受力小于板状集沙叶片,在峰值处体现尤为明显,因而700 mm圆弧半径情况受力优于板状结构。
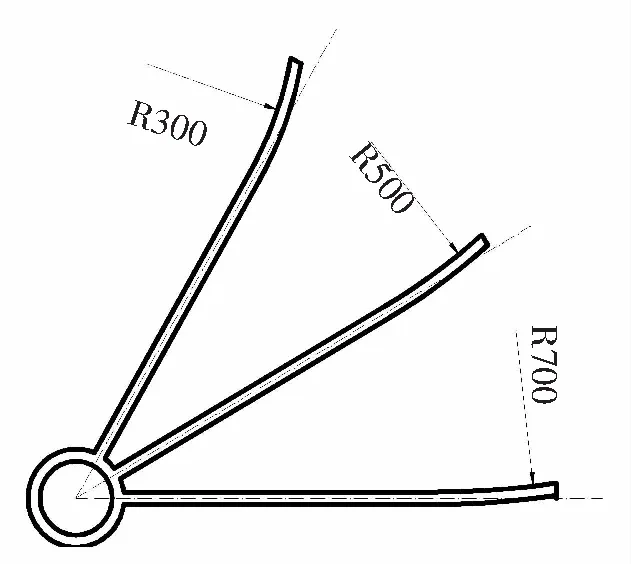
图5 3种形状刀具示意图
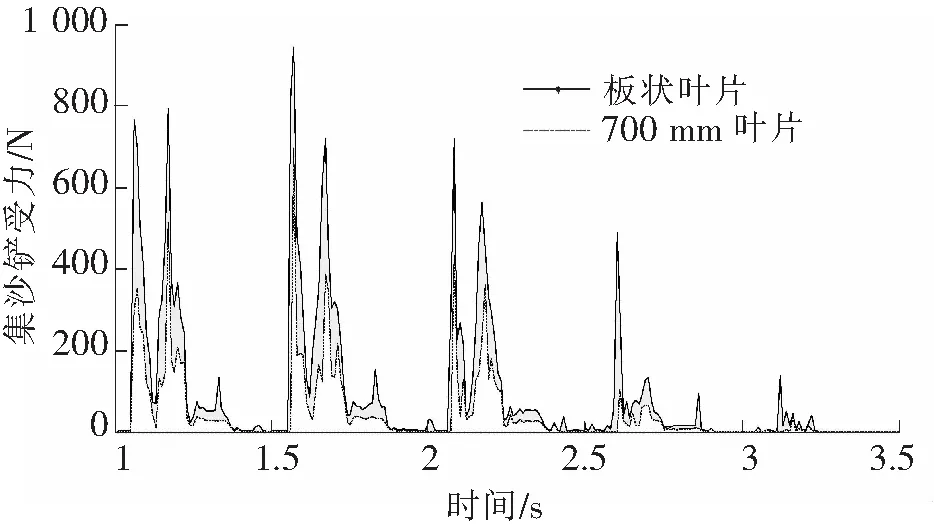
图6 板状集沙叶片与700 mm圆弧半径集沙叶片受力曲线
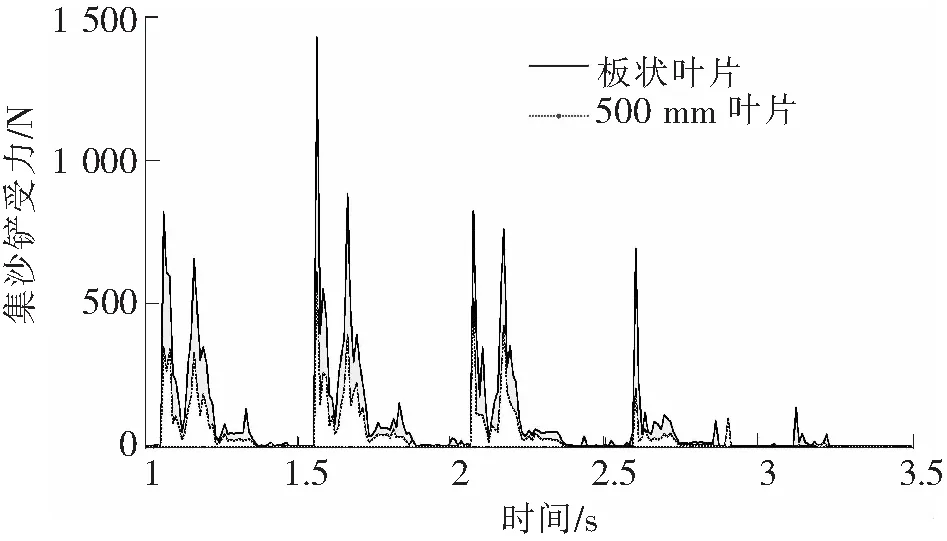
图7 板状集沙叶片与500 mm圆弧半径集沙叶片受力曲线
图7是板状集沙叶片与500 mm圆弧半径集沙叶片受力曲线对比,500 mm圆弧半径集沙叶片受力在各处均明显小于板状集沙铲受力,500 mm圆弧半径集沙叶片相比板状集沙叶片在受力上优势明显。
图8是板状集沙叶片与300 mm圆弧半径集沙叶片受力曲线对比,300 mm圆弧半径集沙叶片的受力在各处均大于板状集沙叶片,300 mm圆弧半径相比板状集沙叶片在受力上优势较小。
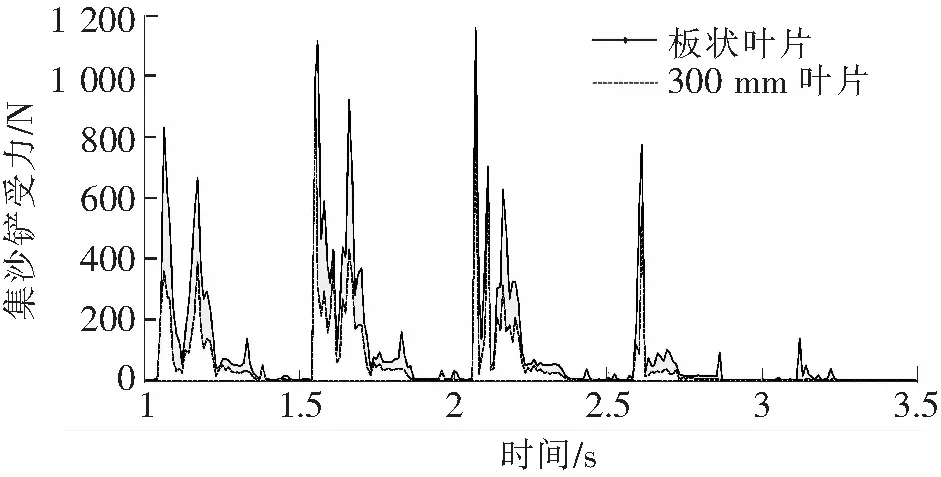
图8 板状集沙叶片与300 mm圆弧半径集沙叶片受力曲线
为了精确对比各形状集沙铲的受力情况,根据仿真数据得到4种集沙铲叶片的平均力,方差和冲量等性能评判数据,如表5。
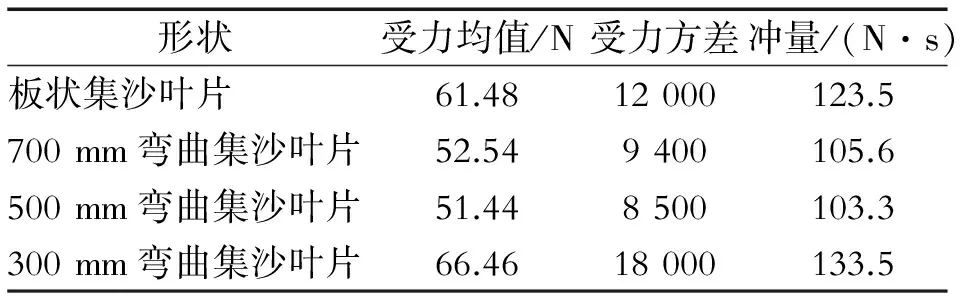
表5 不同形状集沙铲性能评判数据
受力均值表示集沙叶片受力量级的大小,方差代表受力曲线的波动情况,冲量代表集沙所受沙堆的冲击力的情况,根据评判数据得到500 mm圆弧半径是目前的最优方案。
4 结论
(1) 针对风沙地区沙土的物理特性,建立该种沙土的EDEM材料模型,该模型经验证符合实际要求。
(2) 分析了集沙铲在不同转速工况下,沙粒总能量的数值规律。得出在90 r/min、100 r/min、120 r/min时,每秒集沙质量为563 kg、集沙铲叶片数目为4时,集沙铲所需额定功率分别为4.24 kW、5.29 kW、7.46 kW,为集沙铲功率分配提供了理论依据。
(3) 在集沙铲的叶片形状优化方面,当集沙铲转速为120 r/min时,分别4种形状集沙铲进行了仿真实验,实验证明,当集沙铲边缘圆弧半径为500 mm时,受力和集沙效果最佳。
[1]McKyes,E Ali,O S .The cutting of soil by narrow blades[ J]. Terramech,1977,14 (2) :43-58.
[2]Hendrick,J G.,William,R G .Soil reaction to high speed cutting[ J]. Trans. ASAE ,1973,16 (3) :401-403.
[3]Fielke,J M .Finite element modeling of the interaction of the cutting edge of tillage implements with soil[J]. Agric. Eng. Res.,1999,74 (1): 91-101.
[4]Ucgul M.,Fielke J M,Saunders C. Three-dimensional discrete element modeling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil[ J]. Biosyst. Eng,2014,121:105-117.
[5]Godwin R J,O’Dogherty M J,Saunders C,Balafoutis A T. A force prediction model for mouldboard ploughs incorporating the effects of soil characteristic properties,plough geometric factors and ploughing speed[J]. Biosyst. Eng ,2007,97 (1):117-129.
[6]鲁军. 离散单元法的数学模型研究及其工程应用研究[D]. 北京:清华大学水利水电工程系,1996.
[7]耿纪莹,卜建清,高焱.基于离散元法的混凝土三轴压缩破坏试验数值模拟[J].石家庄铁道大学学报:自然科学版,2015,28(2):88-91.
[8]李博,陈军,黄玉祥. 机械与土壤相互作用的离散元仿真研究进展[J]. 农机化研究,2015,1(5):217-227.
[9]韩高孝,宫全美,周顺华.桩网结构路基土拱效应离散元研究[J].石家庄铁道大学学报:自然科学版,2014,27(4):19-23,36.
PowerAnalysisandShapeOptimizingofRailwaySandCleaningVehicleShovels
LiChenyang1,WuWenjiang2,WangZhenxing1
(1.Tianjin Engine Section of Beijing Railway Bureau, Tianjin 300232, China;2.Engineering Training Center of Shijiazhuang Tiedao University,Shijiazhuang 050043,China;3.College of Mechanical Engineering of Shijiazhuang Tidao University,Shijiazhuang 050043,China)
Based on the DEM, a simulation model through EDEM software by using Hertz-Mindlin contact model gives the physical properties of sand and the geometric characteristics of sand collection shovel. The sand quantity, speed, and energy, etc. of sand pile are analyzed for the sand shovel revolving speed is of 90 r/min, 100 r/min and 120 r/min, and the calculated power respectively required under the three kinds of speed are 4.24 kW,5.29 kW and 7.46 kW. Optimization is made of sand shovel blade shape at a fixed speed of 120r/min. Simulation experiments are made to compare the stress of flat sand shovel when the sand shovel end arc radius is 700 mm,500 mm and 300 mm,which shows a better working condition can be obtained at 500 mm.
sand-cleaning car;sand collection shovel;simple sand collection shovel model;the numerical simulation
TH123
A
2095-0373(2017)04-0062-06
2016-03-26责任编辑车轩玉
10.13319/j.cnki.sjztddxxbzrb.2017.04.12
李晨阳(1989-),男,硕士研究生,主要从事载运工具仿真模拟的研究。E-mail:429332178@qq.com
李晨阳,吴文江,王振兴.轨道除沙车集沙铲功耗分析与形状优化[J].石家庄铁道大学学报:自然科学版,2017,30(4):62-67.
