自适应升降喷杆施药系统的研发
2017-12-16李东星
李东星
(1.北京京鹏环球科技股份有限公司,北京 100094;2.北京市植物工厂工程技术研究中心,北京 100094)
自适应升降喷杆施药系统的研发
李东星1,2
(1.北京京鹏环球科技股份有限公司,北京 100094;2.北京市植物工厂工程技术研究中心,北京 100094)
针对传统简易施药机易造成人员中毒、药液喷洒过多易造成环境污染等问题,以及现在温室内用施药机在自适应作物高矮、自主行走、精准施药等方面仍存在一定的局限,北京京鹏环球科技股份有限公司研发了一种自适应升降喷杆施药系统,包括喷药系统、雾化系统、喷杆自动调节系统、控制系统及无轨道自走式底盘等。该施药系统创新性在于温室内与无轨道自走式底盘配合使用,可实现路径导航的自动化、智能化;其喷杆自动调节系统创新性地采用超声波传感器用于探测施药机与农作物施药目标的距离,以便进行精准施药,拟为解决狭小温室空间内自主行走及施药问题提供参考,实现温室内施药的无人化、机械化、自动化、精准化,提高温室内植保装备的机械化水平,改善劳动环境,提高劳动效率。
施药机;自适应;升降喷杆
0 引言
温室作物生长过程中,一旦受到病虫害的侵害,农作物的品质和产量会受到极大的影响,因此病虫害防治是温室作物生产的重要环节。
目前,国外较早开展了对农药精准施用方法的研究,以提高农药利用率、保护环境[1-3]。在病虫害防治方面,主要应用精确喷雾技术和高效利用喷雾技术,但主要适用于大中型喷雾机械,不适合我国温室生产[4]。中国农业大学研制了温室对靶喷雾机器人,能在高架导轨上根据黄瓜病害垄位置启停,并控制机械臂对植株病害表面进行预定位,从而进行喷药作业[5]。北京农业智能装备技术研究中心研制了一种温室轨道施药机器人,即在温室内铺设相应轨道,施药系统在轨道上进行喷药作业[6]。由于设施内部作物种类及高矮不一、土地利用率高、种植密度大及行间通过性差,其研发的装备在作物高矮方面适应性及自主行走方面仍有一定的局限性。为此,北京京鹏环球科技股份有限公司研发了一种自适应升降喷杆施药系统。该系统无需铺设轨道,将喷头装在竖立喷杆上,便可根据传感器实现自动探测目标喷洒区域范围,实现精准喷药;能自适应地进行喷杆升降及喷杆运动空间路径规划,自动适应草莓等低矮作物和番茄辣椒等高杆作物,最大限度地利用农药资源,节省药液,实现设施内施药的精准化、无人化操作,适用于小面积或空间受限场合,可挂接在无轨道自走式底盘上使用。
1 设计原理及机构
1.1 设计原理
针对传统简易施药机易造成人员中毒、药液喷洒过多易造成环境污染,以及现在温室内用施药机在自适应作物高矮、自主行走及精准施药等方面仍存在一定的局限,北京京鹏环球科技股份有限公司研发了一种自适应升降喷杆施药系统。该系统采用电力驱动,与传统烧汽油的施药机相比,具有绿色环保、对环境污染小等特点,可挂接在无轨道自走式底盘上使用。通电后,无轨道自走式底盘配合施药系统行进到作物栽培槽之间(两行作物之间的过道)进行作业;喷杆上安装有高、中、低3个高度的超声波传感器,通过超声波传感器可自动探测到植物病害的位置。当病虫害在作物植株位置1时,喷杆的超声波传感器1探测到并执行喷药命令;当病虫害在作物植株位置2时,喷杆的超声波传感器2探测到并执行喷药命令;以此类推(见图1),进而锁定目标喷洒区域范围,液压驱动泵根据传感器探测的位置举升油缸带动喷杆移动到病害位置,启动风机,风筒内形成定向风吹到喷杆的喷头上;同时,加压泵启动将药箱内的药液供应到喷杆上的喷头,随着风向进行药液定向喷施,进行精准喷施作业,从而实现作物病害识别的自动化及喷药的精准化。
该系统具有以下特点:①能够实现设施内精量施药的无人化操作,避免操作人员因操作不当引发中毒等问题。②可借助超声波传感器,自动探测目标喷洒区域范围,实现精准喷药,节省成本,提高施药精度;能自适应地进行喷杆升降以及喷杆运动空间路径规划。③能自动适应草莓等低矮作物和番茄辣椒等高杆作物,最大限度地利用农药资源,节省药液。④适用于小面积或空间受限场合,可挂接在无轨道的自走式底盘上使用,通用性强。
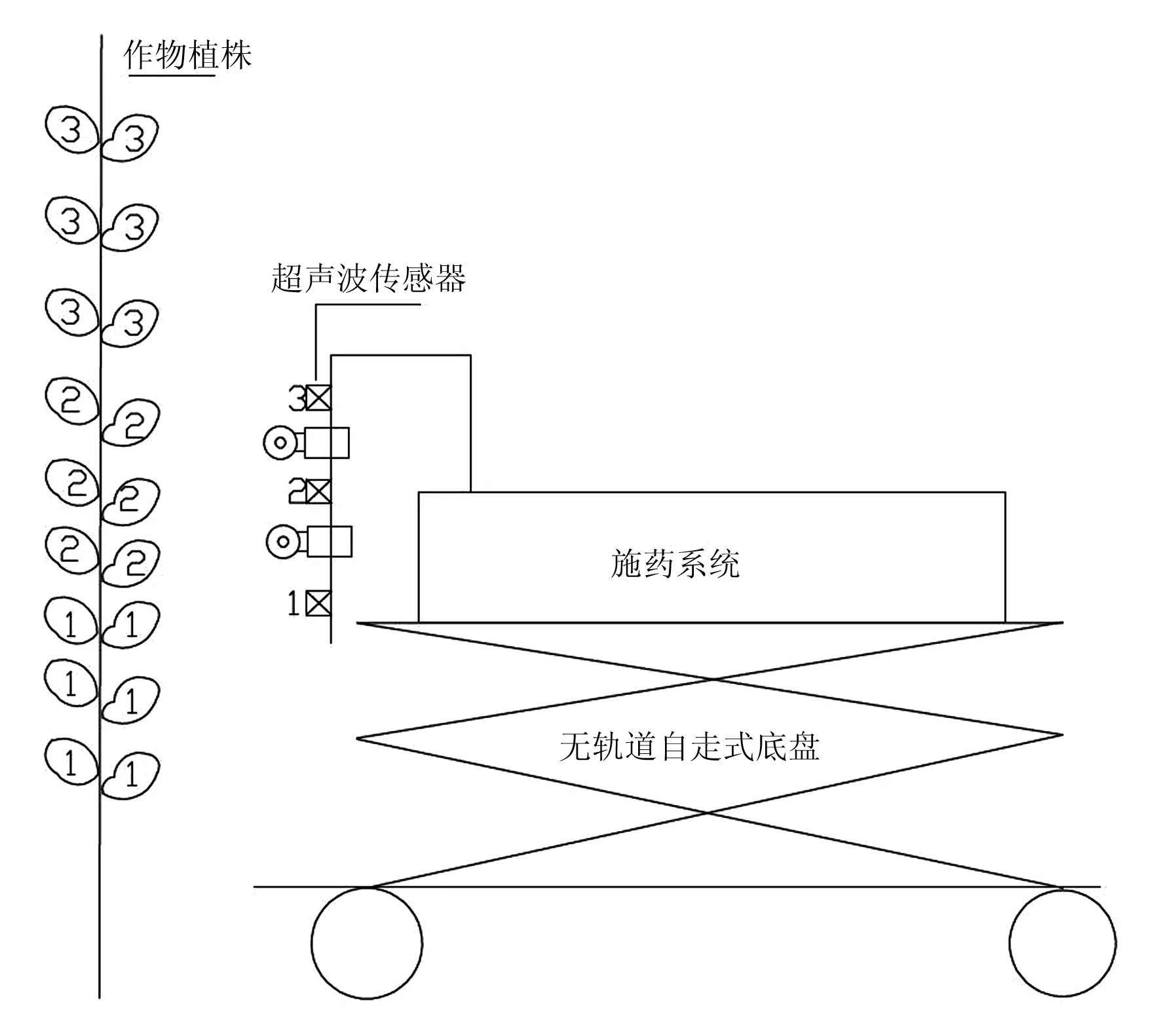
图1 施药机设计原理图
1.2 总体设计方案
自适应升降喷杆施药系统,主要由喷药系统、雾化系统、喷杆自动调节系统、电控系统及无轨道自走式底盘等5部分组成,如图2所示。
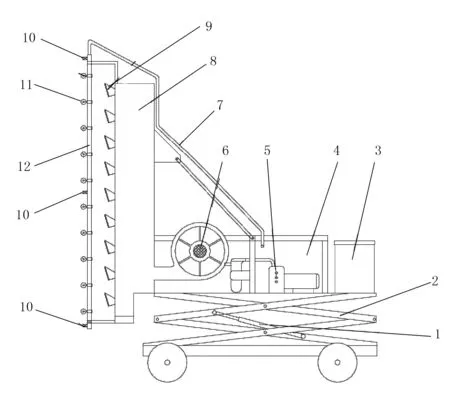
1.液压举升油缸 2.液压剪叉机构 3.控制箱 4.药箱 5.驱动电机 6.风机 7.施药软管 8.风筒 9.出风口 10.超声波传感器 11.喷头 12.喷杆
喷药系统主要用于喷施药液,将药箱里的药液通过施药软管通入喷头进行施药;雾化系统将药液的雾滴变得细小均匀,进行精准喷施;喷杆自动调节系统可通过超声波传感器探测到目标作物的位置,从而调节喷头进行喷药;电控系统主要实现各执行动作的自动化;无轨道自走式底盘主要用于实现喷药机前进、后退、转弯等。其主要技术参数如下:
药液压力/MPa:0.4~0.5
药箱容量/L:25
喷头流量/L·min-1:1~2
作业幅宽/m:3~6
2 主要部件的设计
2.1 喷药系统
喷药系统主要由喷头、药箱、喷杆、施药软管、驱动电机及风机等部分组成,如图3所示。
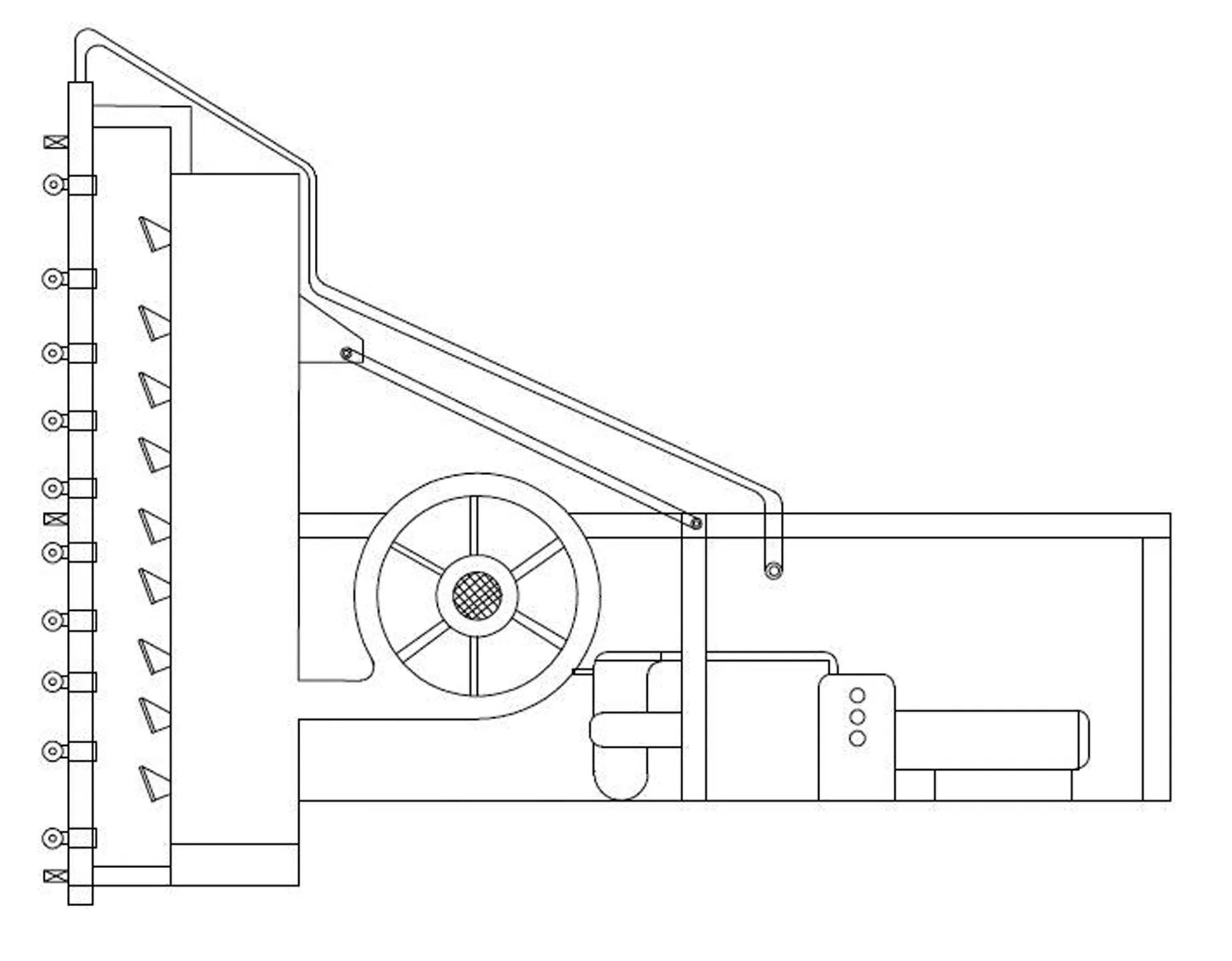
图3 喷药系统设计简图
其中,喷头采用扇形防滴漏喷头,如图4所示。喷药时,喷雾扇形剖面产生逐渐变小的边缘喷雾液滴,具有喷雾水流均匀及液滴大小中等等特点。
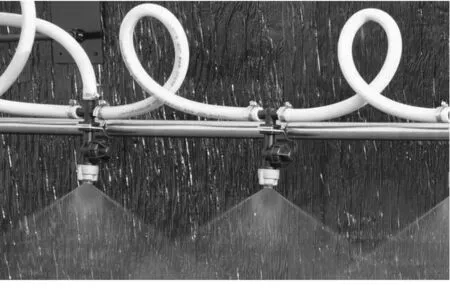
图4 喷头选型示意图
由于设计该施药系统是与多功能自走式作业平台相挂接使用,喷药系统由人工安装上去,考虑人均提药液在20~30L左右,设计药箱药液容量为25L,喷头总流量为1~2L/min。由于喷药系统工作时间=药液药箱容量/喷头流量,即该喷药系统在温室内工作时间=25L/(1~2L/min)=12.5~25min。
本设计驱动电机动力源采用48V20AH型铅酸蓄电池作为供应能源,具有安全、绿色、环保等特点,其蓄电池技术参数如下:
品牌:超威
型号:48V20AH
外型尺寸/mm:318×188×206
电压/V:12
额定容量/L:13
喷药系统可固定在无轨道自走式底盘上,喷头与药箱之间通过施药软管进行连接。施药时,将混合好的农药倒入药箱中,药液由液压泵从药箱中抽出经施药软管送到各个喷头。
2.2 雾化系统
雾化系统由风机供风,主要部件为直立风筒。该直立风筒呈同轴柱形结构(见图5)可使风筒的气流速度呈外高内低的阶梯度分布,约束雾滴的运动轨迹,减少雾滴漂移。

图5 风筒柱形结构
直立风筒固位于竖立喷杆的后方,其上布设1组风咀,各风咀的出风口朝向前面的喷头组。风咀外口大、内口小,且外口端面为非直立状态,其外口端面与直立风筒中心轴线的夹角为10°~35°。这样的结构设计使风咀的气流速度外高内低,可以再次约束雾滴的运动轨迹,减小雾滴漂移。喷雾时,进入施药软管的具有压力的药液在喷头的作用下,以雾状形式喷出,并通过风机产生的强大气流,将雾滴再次进行雾化。同时,通过风咀气流将雾化后的细雾滴吹送到植株冠层内。
2.3 喷杆自动调节系统
喷杆自动调节系统主要由液压剪叉机构、液压举升油缸及超声波传感器等组成。液压剪叉机构安装在机架上,液压举升油缸安装在剪叉机构上且受控于电控系统,以带动液压剪叉机构实现起升和回落。超声波传感器分设安装在喷杆的上、中、下3个位置上,通过该组超声波传感器可以感知作物的高度,将采集的信息反馈给电控系统以控制液压举升油缸作用于液压剪叉机构,实现对喷杆喷雾高度的控制。
传统方法探索喷洒区有无病害作物的形式,通常采用图像识别处理技术[7-16],而考虑成本和实用性,本设计采用超声波传感器。
超声波传感器为喷杆自动调节系统的核心部件,其工作原理(见图6)为超声波传感器发射高频声波,通过测量声波从发生器发出至农作物发射回来所需要的时间,根据声速、传播时间与距离的关系来感知被测物体的距离。
本研究采用南京汉盟的超声波探头HM-UL05M-CP1,技术参数如表1所示。其具有以下特性:①双探头,一个探头发出超声波,另一个探头接收超声波;②反射式,超声波测距仪发出超声波,超声波经过被测物体反射回来,又回到测距仪;③超声波发射张角为60°;④设备外形为长方体;⑤安装方式为测距仪两端的安装孔。
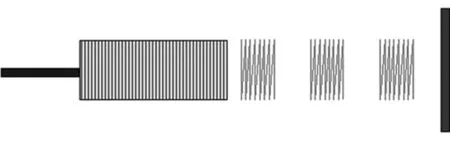
图6 超声波传感器探头测距原理图
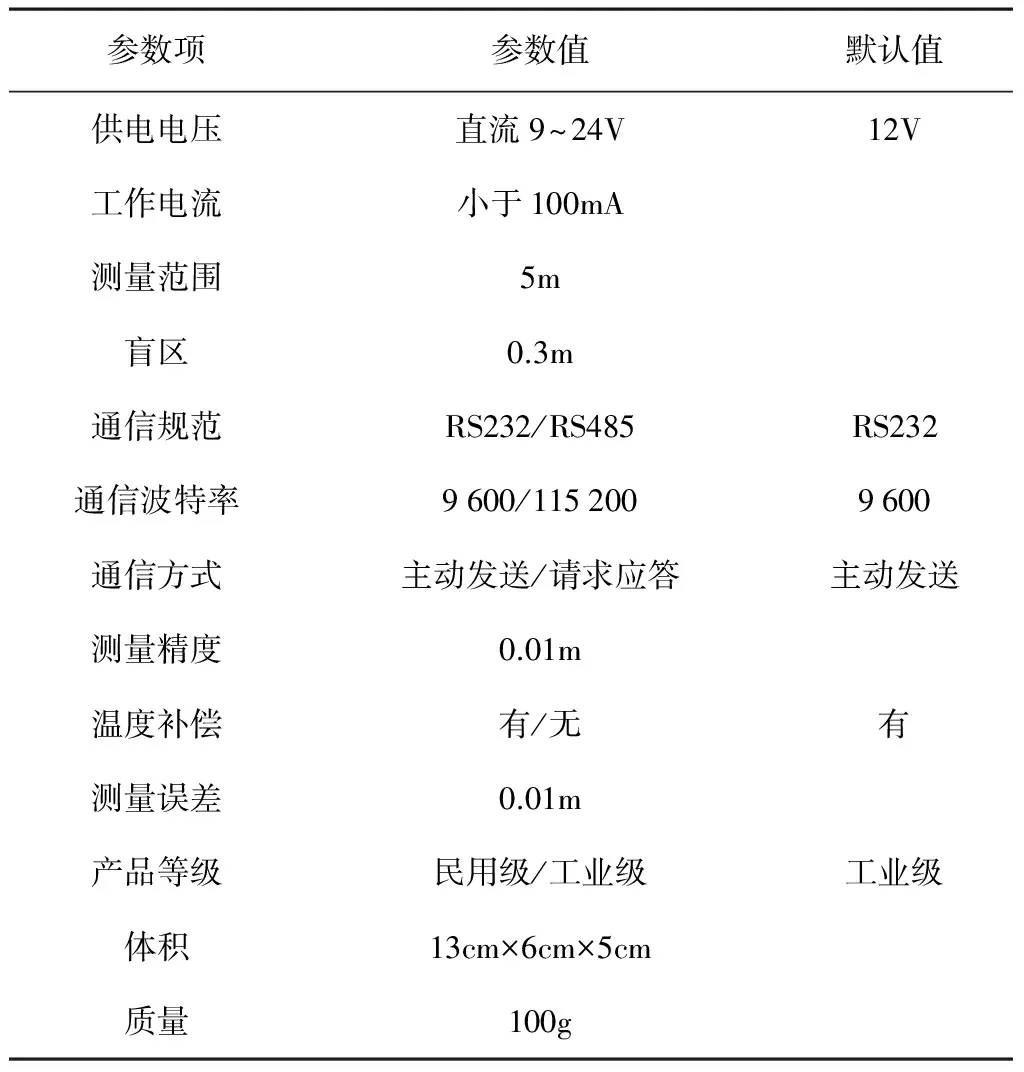
参数项参数值默认值供电电压直流9~24V12V工作电流小于100mA测量范围5m盲区0.3m通信规范RS232/RS485RS232通信波特率9600/1152009600通信方式主动发送/请求应答主动发送测量精度0.01m温度补偿有/无有测量误差0.01m产品等级民用级/工业级工业级体积13cm×6cm×5cm质量100g
2.4 电控系统
控制系统由显示屏、控制面板、工控机、PLC与外围电路等硬件系统及软件系统组成,主要控制喷杆高度调节、液压执行和喷药执行3个部分,其原理图如图7所示。其中,喷杆高度调节控制器采用西门子PLC控制器PLCS7-200。喷杆高度调节控制器通过安装在喷杆上的一组传感器实时检测目标喷洒区域范围,并据此产生相应的控制信号,控制比例换向阀来驱动大臂摆动控制液压举升油缸,实现喷杆高度的调节。
在工作过程中,水泵由总电源开关同时控制开闭,水泵处于常开状态,通过回水电磁阀开闭实现水流方向转换;超声波传感器确定喷施决策,传递至控制系统。喷施工作时,PLC控制相应电磁阀组开启,回水电磁阀关闭;上限位液位开关控制进水电磁阀开闭状态,如果液位到达上限位,则关闭电磁阀,否则关闭;下限位开关控制水位报警灯,如果液位到达下限位,则开启报警灯,提示缺水;电磁阀组由PLC控制器控制,由控制系统依据喷施决策进行开闭。
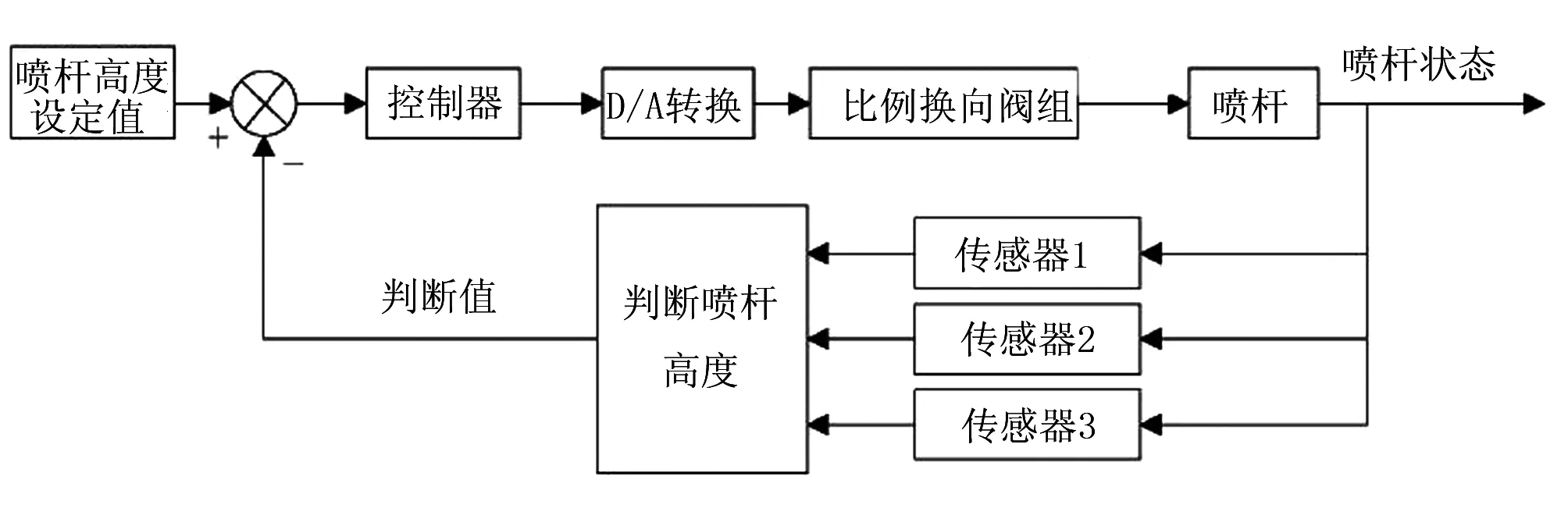
图7 一种自适应升降喷杆施药机工作原理图
2.5 无轨道自走式底盘
自适应升降喷杆施药系统设有一个无轨道自走式底盘(见图8),该底盘具有一组液压驱动轮,驱动轮均为铁制外包胶钢轮,用于承载自适应升降喷杆施药系统的主体单元并实现行走功能。
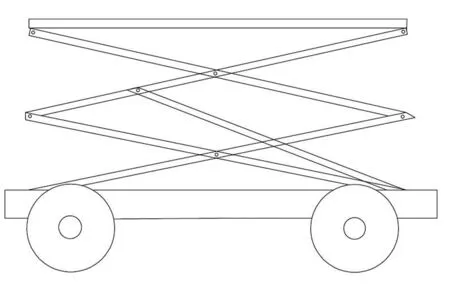
图8 无轨道自走式底盘
3 结论
1)自适应升降喷杆施药系统不受温室作物品种和种植方式的限制,可适应农药喷洒要求,无需操作者进入,避免环境封闭易造成人员中毒等危害。
2)自适应升降喷杆施药系统采用的自适应喷杆调节系统,能自适应地进行喷杆升降以及喷杆运动空间路径规划,自动适应不同高度作物的施药需求。
3)自适应升降喷杆施药系统配设完善的电控系统,可实现温室作物病虫害的机械化、自动化防治;可最大限度地利用农药资源,节省药液,有利于提高作业工效和农药利用率,减轻施药造成的环境污染。
4)自适应升降喷杆施药系统可与无轨道自走式底盘自动挂接,方便作业,具有较强的通用性和一定的推广前景。
[1] Panneton B, Theriault R,Lacasse B.Efficacy evaluation of a new spray-recovery sprayer for orchards[J].Transactions of ASAE, 2001, 44(3):473-479.
[2] Tian L, Zheng J. Dynamic deposition patter n simulation of modulated spraying[J].Transactions of ASAE, 2000, 43(1):5-11.
[3] Svensson S A, Fox R D, Hansson P A. Forces on apple trees sprayed with a cross-flow fan air jet[J].Transactions of ASAE,2002, 45(4): 889-895.
[4] 张燚洺.设施农业喷雾机器人的研究及仿真分析[D].长春:吉林大学,2015.
[5] 曹峥勇,张俊雄,耿长兴,等.温室对靶喷雾机器人控制系统[J].农业工程学报,2010,26(12):228-233.
[6] 李良,张文爱,冯青春,等.温室轨道施药机器人系统设计[J].农机化研究,2016,38(1):109-112.
[7] 赵茂程,郑加强. 树形识别与精确对靶施药的模拟研究[J]. 农业工程学报,2003,19(6):150-153.
[8] 陈勇,郑加强. 精确施药可变量喷雾控制系统的研究[J]. 农业工程学报,2005,21(5):69-72.
[9] 陆健,毛罕平,陈树人. 基于ARM7的精确对靶喷施除草潜入式控制系统[J]. 农机化研究,2009,31(12):76-79.
[10] 尹东富,陈树人,裴文超,等.基于处方图的室内变量喷药除草系统设计[J].农业工程学报,2011,27(4):131-135.
[11] 陈丽君. 基于机器视觉的变量喷雾控制系统研究[D].沈阳:沈阳农业大学,2009.
[12] 李志刚,傅泽田,史岩.棉花虫害自动识别和智能决策系统设计[J].农机化研究,2006(7):122-124,127.
[13] 毛文华.基于机器视觉的田间杂草识别技术研究[D].北京:中国农业大学,2004.
[14] 葛玉峰,周宏平,郑加强,等.基于机器视觉的室内农药自动精确喷雾系统[J]. 农业机械学报,2005(3):86-89.
[15] 饶洪辉.基于机器视觉的作物对行喷药控制系统研究[D].南京:南京农业大学,2006.
[16] 郑加强,周宏平,徐幼林,等.农药精确对靶施用及其系统设计[J].农业工程学报,2005,21(11):67-72.
Research of Spraying Machine of Adaptive Lifting
Li Dongxing1,2
(1.Beijing Kingpeng International Hi-Tech Corporation, Beijing 100094, China; 2.Beijing Engineering Research Center of Plant factory, Beijing 100094, China)
Beijing Kingpeng International Hi-Tech Corporation has developed an adaptive lifting spraying machine because that traditional simple spraying machine is easy to cause the personnel poisoning and spraying machine which used in greenhouse has problems of adapting different crop height and walking independently. The spraying machine included pesticide application system, spraying system, spray bar automatic adjusting system, control system and trackless self-propelled chassis etc. There are two innovations. The adaptive lifting spraying machine which uses trackless self-propelled chassis can realize automatically and intelligent of path navigation is one innovation. The spray bar automatic adjusting system uses ultrasonic sensors to detect the distance of machine and crops to pesticide accurately is another innovation. It will provide the reference to solve the problems of walking automatically and pesticide application in small greenhouse, and achieve to unmanned pesticide application, mechanization, automation and precision in greenhouse, improve the mechanization level of plant protection equipment in greenhouse, improve working environment and labor efficiency.
spraying machine; adaptive; lifting; research
2016-07-06
北京市科委项目(D151100003715002)
李东星(1986-),女,河北承德人,硕士,(E-mail)ddxing521@126.com。
S491
A
1003-188X(2017)08-0097-05
