基于PLC的穴盘苗移栽自动控制系统设计
2017-12-16伯艳广
伯艳广
(赤峰工业职业技术学院,内蒙古 赤峰 024005)
基于PLC的穴盘苗移栽自动控制系统设计
伯艳广
(赤峰工业职业技术学院,内蒙古 赤峰 024005)
移栽技术可以促使蔬菜再生新根,提高产量和品质及土地利用率,在清除杂草、苗期浇水施肥和病虫防治方面也有着重要的作用。育苗移栽工作量大,效率低,增加了种植户的成本,也影响植株的生长发育,在移栽育苗中引入采用PLC系统的自动穴盘苗移栽技术,则可以克服这些缺点。为此,基于PLC技术设计了穴盘移栽控制系统。移栽试验发现:该系统协调性好,可以进行自动取苗和送苗,取苗成功率98.2%,植苗成功率98.8%,移栽时间短,能够达到育苗移栽的标准。
穴盘苗;自动移栽技术;机械手;PLC
0 引言
目前,传统的播种方法已经远远不能满足蔬菜产量的需要和种植要求,而移栽能够避开幼苗的冷冻、干燥时期,可对气候进行补偿,提早农作物成熟时间及增加产量,在提高种植户的收益和产量方面有着非常重要的意义[1-3]。穴盘育苗技术在20世纪就已经大面积地运用到农业生产中,能够节约土地,且没有缓苗期,幼苗易于成活,有益于工业化农业的发展。因此,集中育苗和规模化生产使穴盘育苗代替传统育苗方式,育苗商品化已形成趋势[4-5]。目前,大多采用的育苗种植移栽方法以人工方式为主,存在耗时长、劳动力多、效率低等缺点。自动育苗移栽机的运用提高了幼苗移栽效率,是现代农业的有效方法。移栽机可分为半自动和全自动两种,半自动穴盘苗移栽机[6-7]准确性比较低,需要人工补苗,所需人力多且工作量大,且容易出现安全问题。因此,全自动穴盘苗移栽机的研发可提高穴盘苗移栽的工作效率,进一步提升蔬菜生产的经济效益。在20世纪末,K.C.Ting[8]等人设计了一款安装机械手的育苗移栽机器人,经试验验证发现:该设计移栽1棵苗耗时仅为2.6~3.25s,移栽的正确率在50%~95%。K.H.Ryu 等人借助笛卡尔坐标系研究改进了移栽机,由气缸、卡盘和夹指组成,很大程度上提高了育苗移栽的效率和正确率[9]。目前,国内使用的穴盘苗移栽机大部分是半自动的,发展比较成熟,但从穴盘中取苗分苗需要人工辅助,重要使成本增加。研究基于PLC系统的穴盘苗移栽技术自动化控制系统中采用了PLC控制系统(Programmable Logic Controller),可存储指令程序,并执行指令控制机械或生产操作[10]。
1 实验研究设计
1.1 设计原理
基于PLC系统的穴盘苗移栽技术自动化控制系统由取苗机构、送苗机构、植苗器和PLC控制系统组成,在PLC控制系统中输入取苗、送苗、植苗的指令并存储在存储器中,然后通过PLC系统发布指令,机械手执行取苗、送苗、植苗任务,完成任务后系统自动刷新,重复整个过程。
1.2 总体设计
本设计采用PLC系统控制整个移栽过程,PLC经过数字运算,将存储的指令通过数字式输出,控制机械或生产操作。PLC控制系统具有可靠性高、稳定性强的特点,因此机械控制中越来越多采用PLC来控制。工作时,PLC控制的穴盘苗移栽机由摄像头采集确认位置信息,输送至PLC系统,经PLC系统控制操作, 完成从穴盘苗中取苗、送苗和植苗的过程,实现穴盘苗的全自动移栽。
穴盘苗移栽中取苗、送苗步骤是移栽机成功与否的关键,是与半自动移栽机区分的决定性因素。本文采用插入式取苗,是将取苗针插入并夹住苗体,然后将苗体从穴盘取出;根据事先计算出的运动轨迹,移动夹持苗体的机械手,由定位装置确定正确位置,送苗任务完成。植苗任务采用植苗器完成,将苗体定位送至植苗器中,完成整个移栽穴盘苗任务。
2 机构组成和取送苗定位控制
2.1 机构组成
穴盘苗移栽机主要由取苗装置、送苗装置、定位装置、移栽装置及PLC系统组成。PLC系统中输入指令包括机械手的取苗力度、上升、下降、移动,以及气缸的控制指令等。取、送苗机构主要由行星轮系驱动连杆机构、凸轮、夹持取苗臂机构,以及柔性链输送曲线滑道组成。植苗机构采用与连杆绑定的植苗器。
2.2 取送、苗定位控制
取送苗定位主要由摄像头和PLC系统组成。工作时,通过摄像头采集图像,识别位置,向PLC输送位置坐标;PLC系统发出指令,进行取苗和送苗,控制机械手在正确的位置完成任务。定位工作的进行可以借助摄像头和图形处理技术来完成,保证了取苗送苗的准确性。
3 试验与结果
3.1 试验条件
穴盘苗移栽试验采用“农博粉霸15号”番茄苗,培育在10×12规格的60穴的穴盘中,穴口大小为26 mm×26mm,穴底尺寸为10mm×10 mm,穴深为45 mm,育苗移栽期为45天,育苗基质含水率35%左右。试验时,测得番茄苗平均高度为125.5 mm,随机选取5盘番茄苗进行移栽试验,并测定该装置的移栽时间、取苗成功率及送苗成功率。
3.2 试验设计结果及分析
为了检测采用基于PLC系统的穴盘苗移栽技术自动化控制与系统的有效性,以“农博粉霸15号”番茄苗进行移栽,随机取5盘番茄苗,在每盘番茄苗中随机移栽30颗幼苗,共150颗番茄苗,获取每盘苗整个移栽过程的移栽时间、每盘取苗成功率及送苗成功率,以检测幼苗损伤率、成活率,确定移栽的有效性。检测数据结果见表1~表3所示。
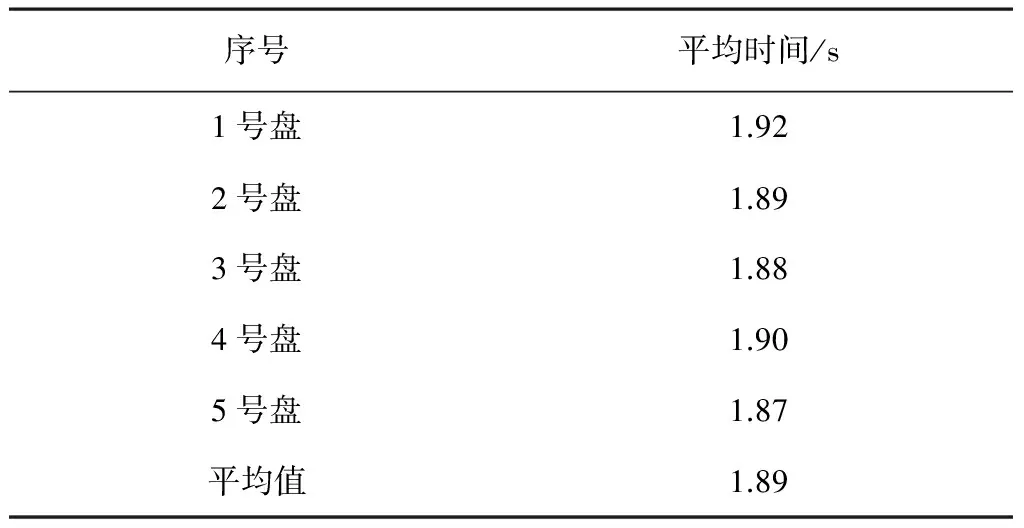
表1 整个移栽过程时间
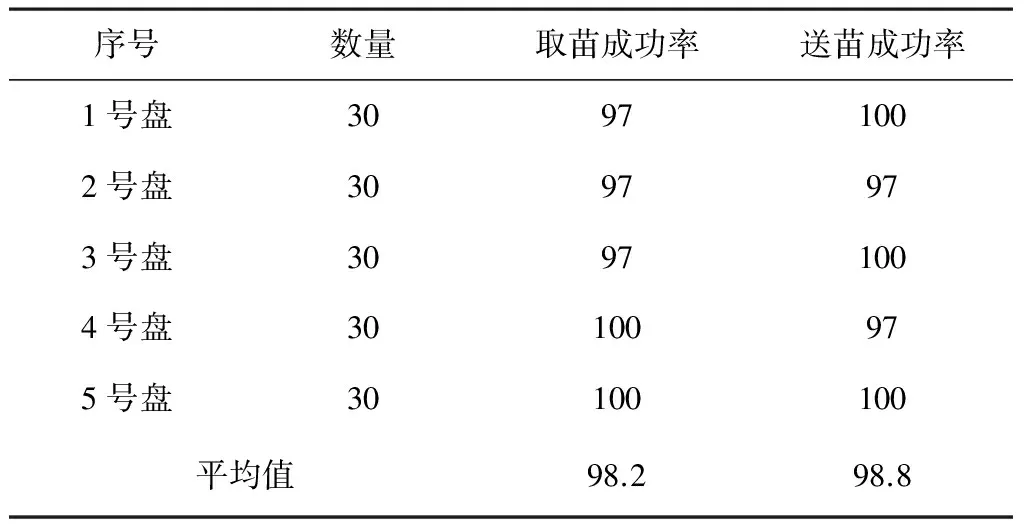
表2 取苗送苗成功率 %
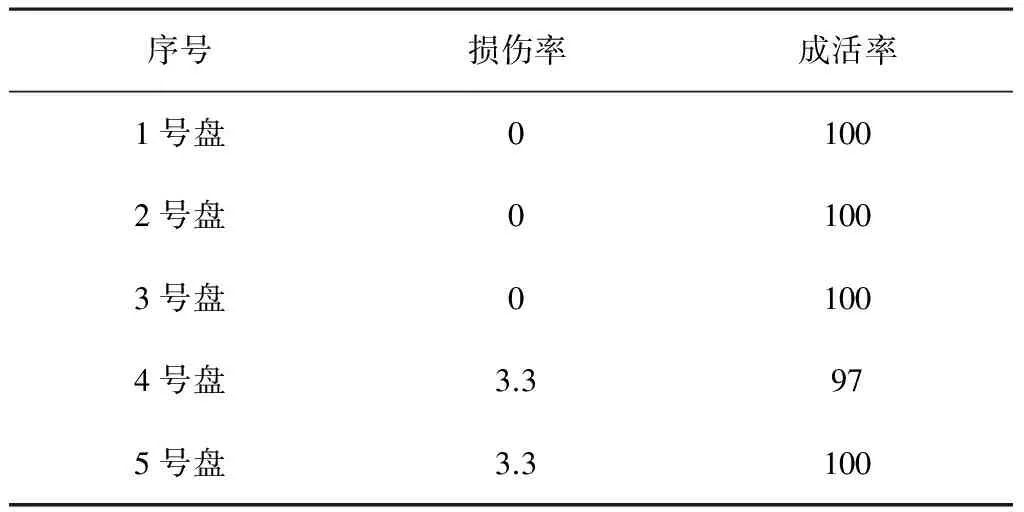
表3 幼苗成活率检测 %
由检测结果可知:采用基于PLC系统的穴盘苗移栽技术自动化控制的移栽机,移栽时间可以达到31颗/min,取苗成功率位98.2%,送苗成功率位98.8%,取苗送苗操作程序均达到要求。
4 结论
基于PLC系统设计了穴盘苗移栽自动控制系统。试验验证结果表明:采用PLC系统控制的自动移栽机移栽番茄苗,在苗期45天时移苗,移苗时间在1.9s/株左右,取苗成功率位98.2%,送苗成功率位98.8%,完全可以满足农业生产需求。
试验证明:基于PLC系统的穴盘苗移栽系统能够提高生产效率,减少种植户的成本投入,在连片种植中有非常大的应用价值。
[1] 陈达,周丽萍,杨学军.移栽机自动分钵式栽植器机构分析与运动仿真[J].农业机械学报,2011,42(8):54-57.
[2] 陈风,陈永成,王维新.旱地移栽机现状和发展趋势[J].农机化研究,2005(3):24-26.
[3] 刘效亮,李其昀.育苗移栽机械化发展方向[J].山东理工大学学报:自然科学版,2003,17(3):108-110.
[4] 毛树春,韩迎春,王国平,等.棉花工厂化育苗和机械化移栽技术研究进展[J].中国棉花,2007,34(1):6-7.
[5] 陈振德.蔬菜穴盘育苗技术[M].青岛:青岛出版社,1999.
[6] 司亚平,何伟明.蔬菜穴盘育苗技术[M].北京:中国农业出版社,1999.
[7] 崔巍,方宪法,赵亮,等.齿轮.五杆取苗装置机构优化与试验验[J].农业机械学报,2013,44(8):74-77.
[8] Visser,Anthony.Apparatus for gripping balls containing plants.United States Patent:US,5121955[P].1992-06-16.
[9] Ryu K H,Kim G Y. Development of a gripper for robotic transplanter and evaluation of its transplanting performance[J].Korean Society for Agricultural Machinery,1998,23(3):271-276.
[10] 周虹. 气动与PLC技术相结合在机械手设计中的应用[J]. 液压与气动,2004(3):38-39.
Plug Seedling Transplanting Technology and System Design Automation Control System Based on PLC
Bo Yanguang
(Chifeng College of Industrial Technology,Inner Mongolia,Chifeng 024005, China)
Transplanting technology can promote the regeneration of new roots, improve the yield and quality of vegetables, improve land utilization, most vegetable seedling growth slow, seedling age longer available up to 2 months old. Transplanting technique in removing weeds and watering seedling fertilization, pest control and also has an important significance. Seedling transplanting heavy workload, low efficiency, increases the cost of farmers, will also affect the growth of plants, the introduction of an automatic system using PLC technology in Plug Seedling transplanting transplanting seedlings, we can overcome these drawbacks, PLC three step system: input, issue commands and refresh procedures, repeated transplanting work can be fully utilized. The technology is also due to take the vaccine, vaccine delivery accuracy been widely used. PLC systems using automatic control system Plug Seedling Transplanting Transplant experiment found that: the system of coordination, and can automatically take and send Miao Miao Miao take the success rate of 98.2%, 98.8% success rate of planting, transplanting less time to reach the standard seedling transplanting.
plug seedlings; automatic transfer of technology; manipulator; PLC system
2016-06-07
内蒙古自治区科技发展计划项目(2014GNC110026)
伯艳广(1966-),男,内蒙古赤峰人,高级讲师,(E-mail)boyanguang0602@163.com。
S223.91+1;S24
A
1003-188X(2017)08-0234-03
