大蒜种植机械蒜瓣方向识别与系统设计——基于PLC控制技术
2017-12-16张丽芬
张丽芬
(内蒙古化工学院,呼和浩特 010000)
大蒜种植机械蒜瓣方向识别与系统设计
——基于PLC控制技术
张丽芬
(内蒙古化工学院,呼和浩特 010000)
大蒜是我国一种重要经济作物,在我国有较大的种植面积。由于大蒜种植时具有鳞芽朝上的农艺要求,因此我国的大蒜种植主要是靠人工,劳动强度大,效率较低。为解决大蒜机械化种植中蒜瓣朝向问题,设计了一种基于PLC控制技术的蒜瓣方向识别系统,并对其在田间的实用性和准确性进行了试验,以期提高大蒜种植作业的效率和质量。用红外检测装置对蒜瓣的外形性状进行扫描,通过PLC对来自红外检测装置的数据进行模糊计算,根据计算的结果判定蒜瓣方向,向机械手发出相应指令。对原型机和改进型所种植的蒜瓣,进行空穴率、双粒率、倒立率、出苗率及产量数据分析,发现两种机械的空穴率、双粒率和出苗率之间没有显著差异,但是改进型种植机产生的倒立率显著低于原型机,说明该蒜瓣方向识别系统能够满足机械种植时蒜头向上种植的要求。
大蒜种植机;方向识别;PLC控制技术
0 引言
大蒜是我国一种重要经济作物,富含氨基酸、蛋白质、肽类、无机盐及含硫化合物等成分,具有消炎、杀菌和养颜等功效,并有着独特的风味,是人们日常饮食生活中的重要组成部分[1]。
近年来,我国消费结构、出口结构的不断调整,大蒜的种植面积不断扩大,达到世界总种植面积的50%以上,成为世界上大蒜的最大生产和出口国[2]。大蒜的食用和药用价值较高,因此大蒜产业也成为了我国外汇的重要来源之一。
蒜瓣的种植是大蒜生产过程中非常重要的一个环节,播种质量直接影响着最终的产量。金诚谦等研究发现:蒜瓣分别按照鳞芽朝上、朝下和随机朝向播种时,均可以顺利出芽生长;但是蒜瓣鳞芽朝下和随机时,大蒜的出苗期明显加长,较细弱且不整齐,出苗后生长缓慢,成熟后得到的蒜头质量较小[3]。因此,大蒜在种植时要求鳞芽朝上,但是蒜瓣的形状具有不规则性,这二者之间的矛盾成为大蒜种植机械设计的难点。
因大蒜种植时鳞芽朝上的农艺要求,我国大蒜的种植基本上靠人工进行,具体方法是在播种时开一条纵向浅沟,将蒜瓣鳞芽朝上点播于土中。这种方式有利于大蒜的顺利出芽和生长,并能达到增产的目的;但该方式种植大蒜需要大量的劳动力和时间,且劳动强度大、效率较低。大蒜的人工种植成本较高,严重阻碍了大蒜产业的可持续发展。
农业机械化是我国农业现代化的主要内容,在农业生产向全程机械化迈进的形势下,实现大蒜的机械化种植既符合我国农业的发展趋势,也是解决上述大蒜种植过程中限制因素的有效途径。目前,世界的各大蒜种植国家都研制了不同型号的大蒜种植机械,分别因地制宜,以不同的方法解决蒜瓣朝向的难题。在亚洲以日本、韩国为代表,其采用的是压穴式大蒜栽种机,即先用机械压出半球形孔穴,后将蒜瓣投放到穴内,利用穴内球面控制鳞芽朝向。在欧洲,法国和捷克斯洛伐克则用振动抖槽来实现大蒜在输送过程的方向调整,再用特定机构扶正蒜头,解决大蒜种植时蒜头朝上的技术难题[4]。作为大蒜的最大生产和出口国,我国在这一领域的起步则相对较晚,但是也形成了适合我国的设计思想和研发体系。
PLC(可编程逻辑控制器)具有操作简单、可靠性和性价比高的优点,早已在现代工业的自动化控制中得到了广泛的应用。随着农业机械的兴起和普及,PLC也被装载在农业机械或设施上,进行变量施肥、穴盘苗移栽及温室生态条件等的精确控制[5-7]。PLC在农业上的应用前景极为广阔,其新的用途有待进一步拓展和开发。为此,基于PLC控制技术,结合现有的大蒜种植机械,设计了一种蒜瓣方向的识别系统,并对其在田间的实用性和准确性进行了试验,以期提高大蒜种植作业的效率和质量,为我国大蒜产业的发展提供技术支撑。
1 设计原理及结构
1.1 设计原理
播种前对蒜瓣的尺寸和形状进行测量,根据测量结果设定PLC的参数,建立蒜瓣识别计算模型。工作时,利用振动的锥形斗带动蒜瓣不断运动,经过位于锥形斗下方的方形孔进入一段倾斜的凹槽中。方形孔和凹槽的尺寸根据蒜瓣的横截面积进行调节,使得单粒蒜瓣只能以蒜头或蒜尾的方向经过方形孔而进入凹槽。蒜瓣在重力作用下沿着凹槽下滑,经过安装在凹槽末端的红外检测装置;红外检测装置对蒜瓣的外形性状进行扫描,然后利用PLC对来自红外检测装置的数据进行模糊计算,根据计算的结果判定蒜瓣方向。若判断结果为蒜头向上,则让其自然地滑入通道1中,正常种植;若判断结果为蒜头向下,PLC则发出一个脉冲指令,瞬时启动机械手将蒜瓣推入通道2中,经过一个转向装置翻转180°后种植。
前期随机取样的统计结果表明:经过振动后进入凹槽的两种方向蒜瓣数目经卡平方测验为1:1。PLC的输出端连接报警装置,当判读的两种方向蒜瓣数目比例偏离1:1时,便发出警报,从而提醒操作人员排除故障。
1.2 总体设计
使用的大蒜种植机是在PH4R型的基础上改进而来,包括动力设备、PLC识别控制系统、种植部件和辅助设备。种植机动力3kW,种植行数4行,设置行距25cm,株距16cm,种植深度8cm。PLC识别控制系统包括红外检测装置、PLC控制器、转向装置、操作显示屏和报警装置。
2 系统组成
红外检测装置由红外发射器和接收器组成。蒜瓣的形状不规则,其头尾部分对红外线的反射存在差异。因此,当方向不同的蒜瓣经过红外装置时,接收器会收到不同的红外线特征信号,并发送给PLC控制器。
PLC控制器是西门子TD200型主控模块,利用RS-232C串口接收来自红外装置和显示屏的信号,在模糊算法的基础上根据最大特征值对蒜瓣方向进行判别,并利用PID控制器调整判别结果,最后向机械手发出指令。另外,可实时监测判别结果,在两种方向蒜瓣数目比例偏离1:1时启动报警装置。转向装置位于通道2的末端,是一个可以翻转的水平挡板,大小根据蒜瓣调节。蒜头向下的蒜瓣被传送到挡板上后,由于蒜尾端较重,便带动挡板旋转,最后蒜尾向下落入种植部件中,实现控制蒜瓣种植方向的效果。
种植机上装载的操作显示屏用于设定和显示相关部件的参数和实时播种数据。报警装置在两种方向蒜瓣数目比例偏离1:1时发出警报,通过显示屏输出,采用声音加指示灯闪烁报警,提示PLC控制器的参数设定不能准确识别该大蒜品种的蒜瓣方向。
3 试验
3.1 试验地点和方法
试验地点位于大蒜种植规模大、产量较高的江苏省盐城市,试验田面积0.3hm2,土壤为两合土,前作为水稻,经过旋耕整田。试验所用的大蒜品种为当地种植户提供的徐州白蒜,试验之前对100个蒜瓣的尺寸进行了测量,平均长度3.1cm,平均高度2.0cm,平均厚度1.6cm,以此作为PLC设定相关参数的依据。
田间试验使用的机械有两种,分别为PH4R原型机和改进型。试验田划分为6块,每种机械完成3块的种植,进行3次重复。作业完成后,在每个重复中随机选取200个种植穴进行调查,统计空穴率、双粒率和倒立率,出苗后调查出苗率,成熟后测产,比较两种机械作业田块之间的差异。
3.2 试验结果和分析
对原型机和改进型所种植的蒜瓣进行空穴率、双粒率、倒立率、出苗率、产量等数据进行分析,具体试验结果如表1所示。
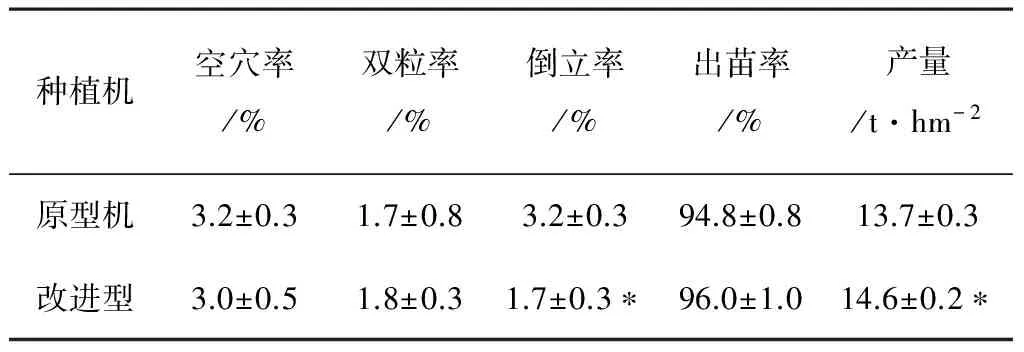
表1 两种机械的蒜瓣田间种植质量比较
*表示两组数据之间存在显著差异。
通过对调查数据的比较发现:原型机和改进型的种植行距、株距、深度和作业速度之间没有显著差异。这说明,加装蒜瓣方向识别控制系统并不影响种植机的这些技术特征,种植效率没有发生改变。
在种植质量方面:两种机械的空穴率、双粒率和出苗率之间没有显著差异,但改进型种植机产生的倒立率显著低于原型机,因此产量显著提高,具有更高的种植质量。
4 结论
田间试验的结果表明:装载了该蒜瓣方向识别系统的改进型种植机作业产生的蒜瓣倒立率很低,能够满足蒜头向上种植的要求,突破了这一限制大蒜种植机械化的瓶颈。但是,该机械是在PH4R型种植机上改进的,加装的蒜瓣方向识别和控制系统导致改进型种植机体积庞大,结构较为复杂,使用过程中的故障率可能较高,其实用性和可靠性还需进一步验证。因此,后续改进还需将识别控制系统与原型机更好地整合,去除部分重复装置以达到轻简化的效果。
另外,蒜瓣方向识别控制系统的参数设定依赖于所种植大蒜品种的整体尺寸和形状特征。本文中的徐州白蒜是一个推广面积很大的品种,蒜瓣尺寸较大。若种植其它的地方品种时,则需对其尺寸进行测量,重新设定系统参数和方形孔的大小。对此,可以优化PLC控制器中用于判别蒜瓣方向的计算和分析程序,以提高识别系统对不同大蒜品种的通用性。
[1] 谢学虎,张永,刘召,等.大蒜播种种植机构的设计[J].农业工程学报,2015,31(1):34-39.
[2] 邵园园,曾庆良,玄冠涛,等.大蒜种植机分插机构优化设计及运动仿真[J].农机化研究,2013,35(1):64-67.
[3] 金诚谦,袁文胜,吴崇友,等.大蒜播种时鳞芽朝向对大蒜生长发育影响的试验研究[J].农业工程学报,2008,24(4):155-158.
[4] 邹帅,魏玉珍,刘勇兰,等.大蒜直立筛选方法探究及其装置方案设计[J].农机研究,2015,37(11):67-70.
[5] 邵利敏,王秀,牛晓颖,等.基于PLC的变量施肥控制系统设计与试验 [J].农业机械学报,2007(11):84-87.
[6] 田素博,邱立春,张诗.基于PLC的穴盘苗移栽机械手控制系统设计[J].沈阳农业大学学报,2007(1):122-124.
[7] 付焕森,赵振江.基于PLC和组态技术现代农业温室控制系统设计[J].农机化研究,2013,37(12):185-188.
Planting Garlic Coves Machine PLC Control Technology and System Design——Based on the Direction Identification
Zhang Lifen
(Inner Mongolia Chemical Industry College,Hohhot 010000,China)
Our garlic is an Important Cash crop in China has a large acreage, with bud scales up agronomic requirements of garlic planting, so our garlic is grown mainly rely on manual, labor-intensive, low efficiency.To solve the mechanization of planting garlic in the garlic towards problem, we designed a PLC-based control technology garlic direction identification system, and tested the practicality and accuracy in the field, in order to improve the efficiency and quality of garlic planting operations. Infrared detection means garlic shape traits scan data from the PLC by means of the infrared detector fuzzy calculation, determining the direction of garlic according to results of the calculation, issue the appropriate commands to the robot. According to this system, and improved prototype planted garlic, conducted hole rate, double the rate of grain, inverted rate, emergence rate, production data analysis, found that both mechanical hole rate, dual rate and emergence rate of grain no significant difference between, but inverted rate improved planting machines produce significantly lower than the prototype, so the yield increased significantly, with higher quality planting. Description The garlic direction identification system to meet the mechanical planting, planting garlic up requirements.
garlic planting machine; direction identification; PLC control technology
2016-06-13
内蒙古化工学院自然科学项目(HYZJY1008)
张丽芬(1980-),女,呼和浩特人,讲师,工程硕士,(E-mail)zhanglifen0614@163.com。
S223.9
A
1003-188X(2017)08-0228-03
