基于单片机与DGUS显示的精密播种机监测系统研究
2017-12-16孟鹏祥耿端阳李玉环王家政孟凡虎
孟鹏祥,耿端阳,李玉环,王家政,孟凡虎
(山东理工大学 a.农业工程与食品科学学院;b.理学院,山东 淄博 255049)
基于单片机与DGUS显示的精密播种机监测系统研究
孟鹏祥a,耿端阳a,李玉环a,王家政b,孟凡虎a
(山东理工大学 a.农业工程与食品科学学院;b.理学院,山东 淄博 255049)
针对当前玉米播种机作业过程存在工况失检、警示不够直接等问题,开发了基于单片机控制和DGUS屏显示的智能检测系统。该系统主要由MSP430单片机、DGUS显示器,以及种箱存量监测模块、播量监控模块、作业面积统计模块等组成,可以实时监视种箱内种子的余量、实时监测并显示播种量和播种面积,且具有出现漏播及时报警等功能。试验结果表明:该智能检测系统可以完成排种器播量与作业面积的在线统计及种箱种子余量的影像监测,且随着作业距离的增加,播种量与作业面积的监测误差趋于减少,满足现有播种机作业的技术要求,基本能实现对漏播现象的稳定可靠报警。
播种监测;漏播报警;DGUS屏;单片机
0 引言
精密播种技术是由播种机将种子精确地播到土壤中预定位置的一种播种方式,即满足“三精确”要求:播种量精确、株距精确及播深精确[1]。目前,玉米精密播种机主要分为气力式和机械式两大类。这两种播种机都存在作业过程不透明性问题,即播种机机手不能直接通过视觉看到种子在种箱、排种器和输种管中的位置和运动状态,若播种机出现漏播或种箱缺种时,机手很难马上发现。为此,许多地区采用播种机作业过程由第三方跟随或者乘坐在播种机上,这样不仅带来安全问题,而且增加了作业过程的人力成本。另外,从当前我国精密播种机的发展现状来看,我国玉米播种机在机械本体上与国际水平差距不大,但在智能监控方面还有很大的差距。国内虽然也有部分学者开始加强对播种过程的智能化监控技术研究,但大都存在一定不足:①太阳光线干扰,导致该监测系统不能正常工作;②虚警过高;③功能集成度不高。所以,开发可靠性好、抗干扰性强的播种工况监测系统,就成为提高播种机智能化水平的关键[2-4]。本文所述的基于单片机与DGUS屏的监测系统以弥补目前国内监测系统的诸多不足为目的,采用激光传感器对播种工况进行检测,并以霍尔传感器作为作业速度的检测单元、以单片机为控制单元,对上述传感器发送的信息进行处理和分析,将结果发送到DGUS屏;DGUS屏将结果显示出来,同时影像系统将通过摄像头将影像发送给DGUS屏,方便驾驶员了解种箱内的情况,提高工作效率。
1 播种机结构及控制原理
1.1 样机单体结构与工作原理
图1为该系统所用玉米播种机单体结构。该单体包括种箱、驱动电机、行走轮、排种器、输种管、开沟器、镇压轮及机架等部分。播种作业时,驱动电机外接220V电源供电,带动播种单体进行播种作业,排种器由镇压轮传动。其各部件安装位置如下:控制系统和显示屏安装于机架上;便携式摄像头安装于种箱内;播种检测探头安装于排种器下端;霍尔传感器安装在模拟轮上,用于检测机器的前进速度。另外,驱动电机带有变速调速器,可以控制播种单体的作业速度。
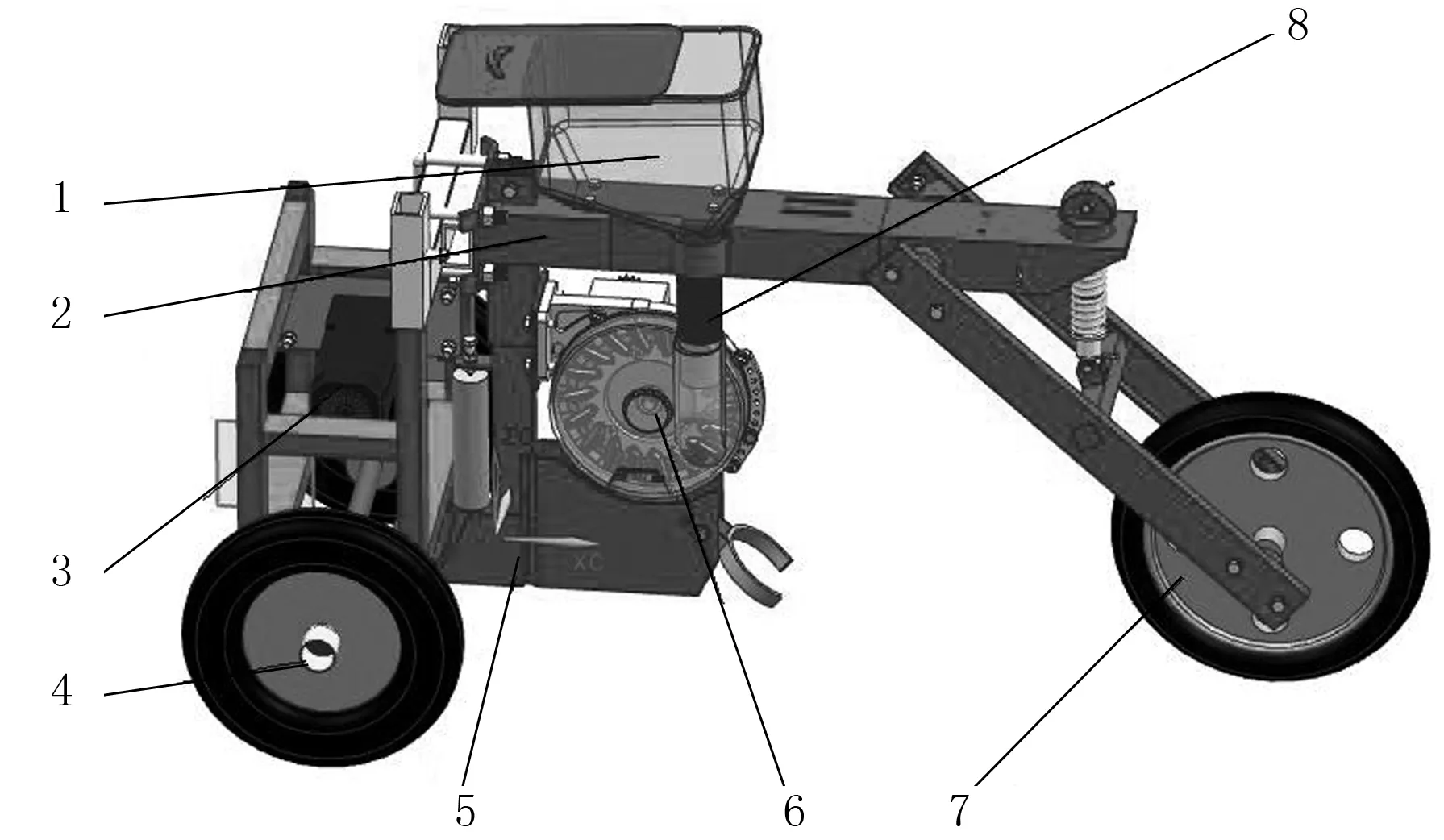
1.种箱 2.机架 3.驱动电机 4.模拟轮 5.开沟器 6. 排种器 7. 镇压轮 8.输种管
图2为该单体样机实物图。该播种单体由前端机架上的电机驱动,排种器选用勺轮式排种器,排种器传动方式采用地轮驱动。

图2 播种单体实物图
1.2 控制系统组成及原理
该控制系统以MSP430G2553单片机为主控制核心,主要完成播种量、播种面积、作业速度和漏播报警等信息的处理;以迪文DGUS显示屏为数据输出设备,可以显示上述参数和便携式摄像头获取的图像信息。其中,播种量主要由激光传感器进行检测,行车速度主要由霍尔传感器进行检测,所测数据通过单片机分析处理后发送到DGUS显示屏上。当播种机在一定时间或者距离内出现漏播现象时,DGUS显示屏发出相应的语音报警。其控制系统结构如图3所示。
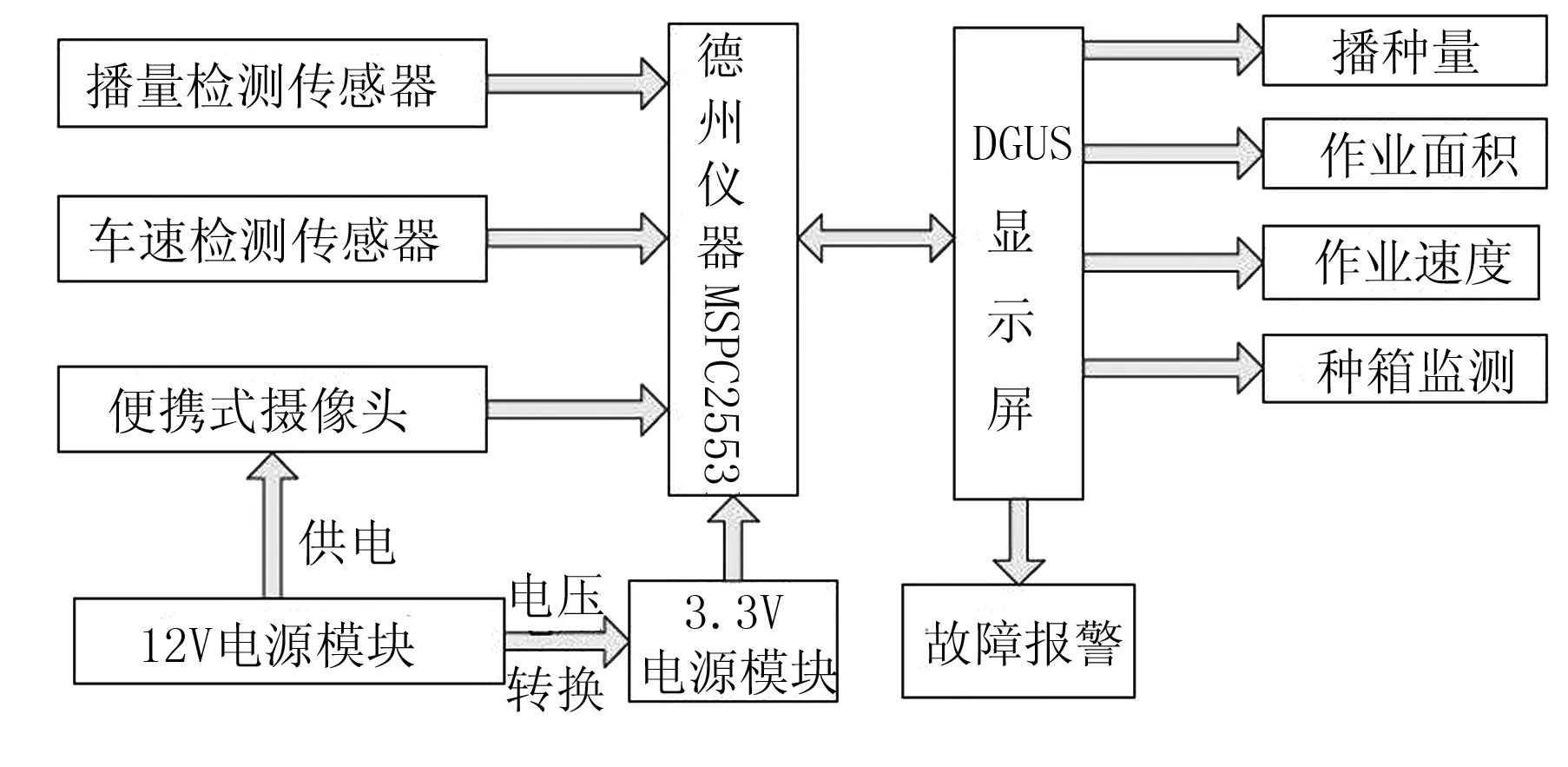
图3 播种机控制系统结构示意图
2 控制系统硬件设计
2.1 播量测量原理
激光传感器是一种利用激光技术进行测量的传感器,由激光器、激光检测器和测量电路组成。激光传感器是新型测量仪表,优点是能实现无接触远距离测量,速度快、精度高、量程大,以及抗光、电干扰能力强等[3]。该设计中选用的是由激光发光管和激光接收管制备的检测探头,其检测播种量的原理如下:在播种机正常工作过程中,当种子通过排种器安装的激光传感器时,激光传感器发出红光束受到种子的遮挡即发出电信号,接收管返回低电平;当没有种子经过时,返回值为高电平。单片机经过比较电平值的高低即可判断是否有种子通过,然后通过单片机计数器原理将播种量进行统计并发送到显示屏上。
2.2 播种面积测量原理
霍尔传感器是基于霍尔效应原理且可以将磁场强度的变化转换成高低电平输出的一种磁场传感器。霍尔传感器具有结构简单、体积小、无触点、可靠性高、响应快及灵敏度高等诸多优点,是当今人们使用非常普遍的一种测速传感器[4]。其测速原理为:传感器模块前端的探头不停地检测拖拉机前轮上贴的磁钢,每经过一个磁钢,探头周围的磁场强度就会发生变化,传感器将磁场强度的变化以脉冲信号的形式输出到单片机中;前轮旋转1圈,传感器发出的脉冲个数与前轮上所贴的磁钢数目是相同的;单片机定时器定时,依据所测脉冲个数和定时时间就可以得到前轮转速,进而可以推算出拖拉机速度,也就得到了播种机相对地面的前进速度。
试验过程中,设定行距为h,排种器调整株距为l,利用模拟轮的转速确定机组前进速度,模拟轮圆周方向均布磁铁数量为z,模拟轮圆周直径d, 设定单片机读取霍尔传感器的时间间隔为1s,则机组前进速度与单位时间内所测的脉冲数的关系为
其中,V为机组的前进速度(m/s);d为模拟轮直径(m);t为定时器T1的设定时间(s);m为传感器接收的脉冲数。
播种面积与机组前进速度的关系为
S=∑(V·t·l·h)
其中,S为播种面积(m2);t为定时器T1的设定时间(s);h为播种行距(m);l为播种株距(m)。
2.3 漏播报警检测原理
采用单片机定时器计时报警,播种过程中,当出现漏播现象且漏播距离为L时,报警系统开始报警,则
其中,T为定时器报警时间(s);L为报警最小行车距离(m);V为机组的前进速度(m/s)。
该方法具有测量准确性高、及时性好等优点。
2.4 系统硬件设计
2.4.1 电源模块设计
在该控制系统中,由于各个模块的供电电压是不同的,显示屏和摄像头供电电压为12V,而MSP430单片机供电电压为3.3V,所以要对电源电压进行电平转换。这里采用12V蓄电池对系统供电,并通过变压芯片LM2576s将电平转换成5V电压,再通过LM1117将电压转换成3.3V,以满足MSP430对供电电压的要求。其电路图如图4所示。

图4 直流电源模块电路图
2.4.2 单片机系统模块设计
在该控制系统中,单片机系统模块主要由单片机和外围电路组成。单片机作为该控制系统的主核心芯片,对传感器采集的信息具有处理分析的功能,因此单片机选择MSP430G2553。该芯片是美国德州仪器(TI)公司生产的一种高性能16位超低功耗,具有精简指令集的混合信号处理器,芯片内置16位定时器, 16kB闪存, RAM内存为512B[5]。其外围电路主要包括外部时钟电路、复位电路和JTAG接口仿真下载电路,电路图如图5所示。
2.4.3 影像监视模块设计
目前,采集图像的方法有单片机直接采集,DMA方式采集和间接采集。在该监测控制系统中,由于摄像头CMOS芯片的时钟速度较高,需要高速MCU才可以直接控制,而MSP430G2553单片机为16位单片机,IO端口速度不能够满足需要,因此采用间接采集并显示的方法,即将CMOS输出的数据直接发送到显示屏进行显示,数据不经过MCU。在该控制系统中,摄像头采用AV接口,供电电源为12V,并带有4个发光LED灯,可以为摄像图像提供光源,使图像显示更加清晰。其显示屏界面如图6所示。

图5 单片机系统与外围电路图

图6 显示屏视频界面
2.4.4 车速检测模块设计
在该控制系统中,作业速度测量模块采用了霍尔传感器,主要检测安装于模拟轮上的磁铁量。其传感器硬件电路连接如图7所示。

图7 传感器接线电路图
2.4.5 播量检测模块设计
在该控制系统中采用了激光传感器和霍尔传感器这两种传感器,激光传感器主要检测是否有种子排出,霍尔传感器主要检测安装于模拟轮上的磁铁量。其传感器硬件电路连接如图8所示。
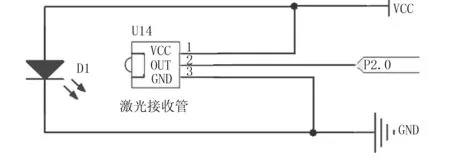
图8 传感器接线电路图
3 控制系统软件设计
整个控制系统采用code composer studio 软件进行编写,主要完成的内容包括检测并记录排种器排出的种子粒数;检测霍尔传感器,并计算播种速度;漏播现象检测,并发出声音报警;单片机发送数据到DGUS显示屏。其软件流程图如图9所示。
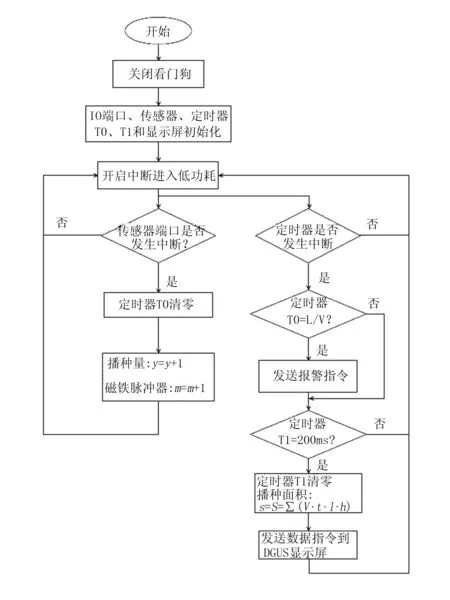
T0为定时器A0,T1为定时器A1,y为播种量值,S为播种面积值,m为磁铁脉冲数值,L为报警最小行车距离值,V为机组前进速度值。
图9 控制系统软件流程图
Fig.9 Flowchart of the control system software
4 试验与结果分析
目前,该研究已经完成了玉米播种机单体和监测系统的制作,并对该单体进行了前期的室内试验,以验证其工作性能的可靠性,测试各种相关技术指标。
4.1 实测播种量和播种面积的结果与分析
为了验证该监测系统对播种量、作业面积参数显示的可靠性和准确性,且由于勺轮式排种器在转速为25~55r/min时,排种性能较好[6],故将驱动电机调速器将速度调整在5km/h。该试验方案设计为:通过驱动电机调速器将播种单体作业速度控制在5km/h,排种器株距设置20cm,播种行距60cm,驱动播种单体分别前进20、40、60、80、100m,记录监测系统显示屏上的数据并人工统计播种单体实际播种量和计算播种面积。重复此试验3次得到试验结果如表1、表2所示。

表1 播种量准确度测试
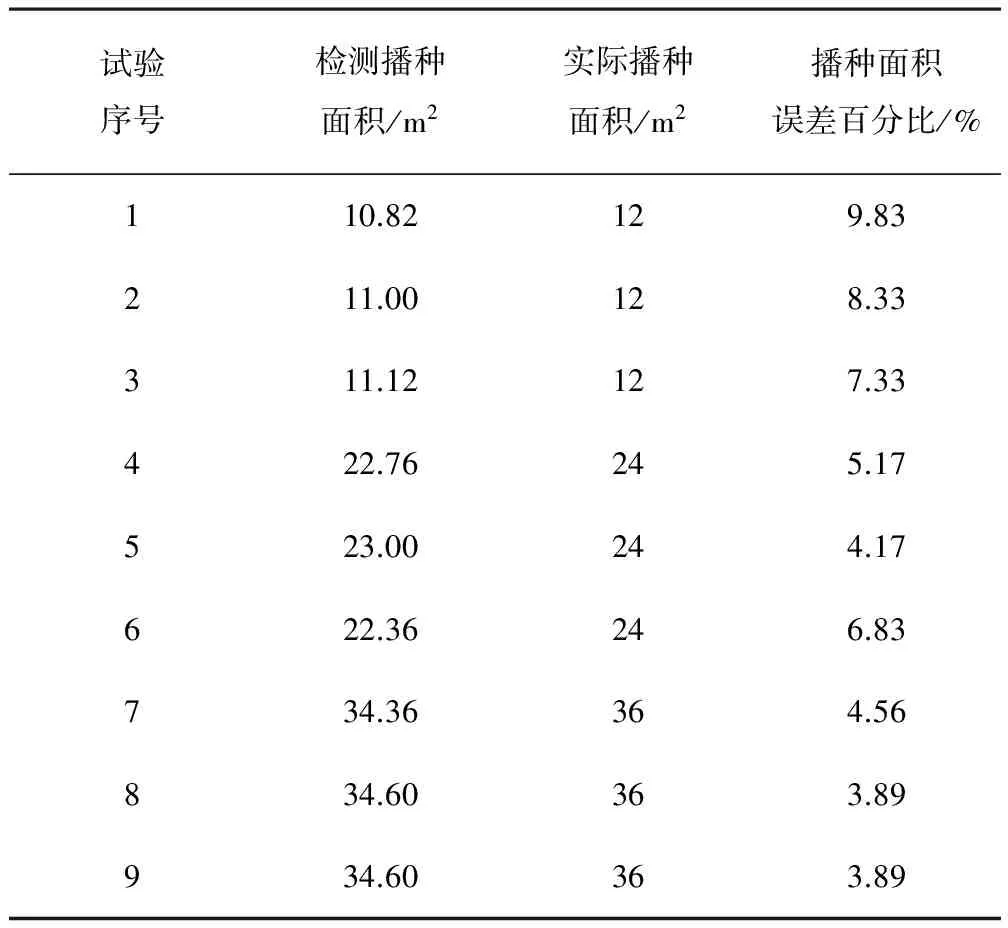
表2 播种面积准确度测试
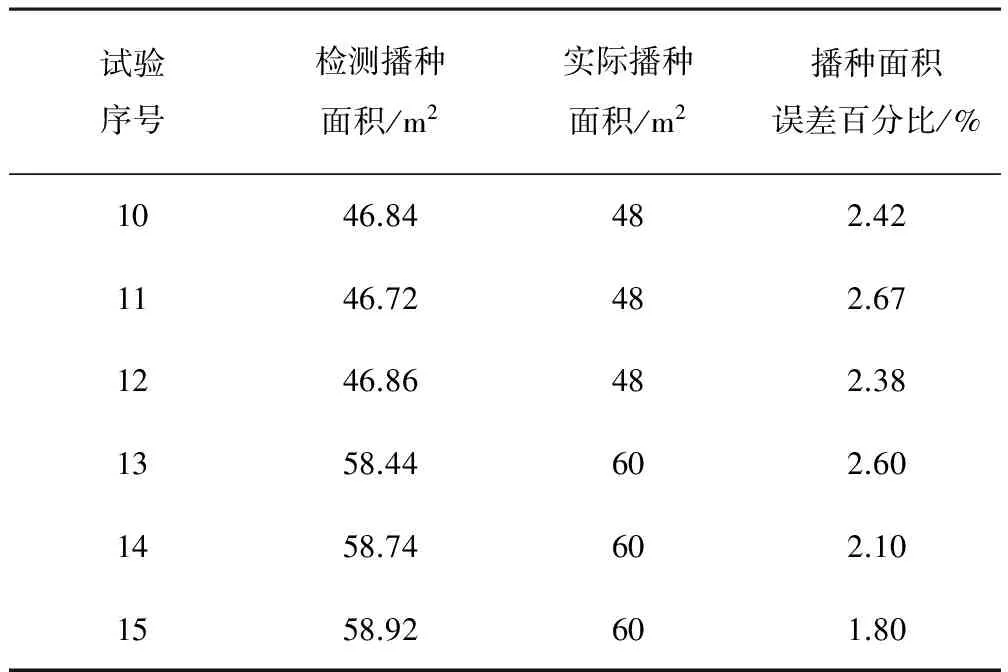
续表2
试验结果表明:该监测系统能够完成对播种量和作业面积的测量,其试验结果中不同作业距离下的播种量误差百分比和播种面积误差百分比是有所不同的,这是由于试验过程中样本量选取差异导致的。样本量作为决定误差大小的一个重要因素,其呈现的规律为:设定作业距离越大,误差百分比越低;作业距离越小,误差百分比越高。其中,播种量误差出现的原因可能为排种器充种多于1个、两个或多个种子同时落下所致。播种面积误差出现的原因可能为播种机作业过程中速度不稳定及行走轮出现打滑现象导致。
4.2 报警系统测试结果
为了验证报警系统的可靠性,试验方案设计如下:在排种器正常播种的情况下,进行人为控制种箱缺种和输种管堵塞,观察显示屏是否发出“漏播”的语音报警,此试验重复100次,结果如表3所示。

表3 报警准确性测试
在排种器正常工作状态下,显示屏正常显示作业参数,不发出语音报警;当出现人为控制种箱缺种100次和输种管堵塞100次,显示屏发出“漏播”报警。上述试验结果表明:该监测系统的报警可靠性为100%,报警系统设计符合要求。
5 结论
1)本文研制的基于单片机与DGUS屏的监测系统试验装置通过激光传感器采集播种机播种信息,通过霍尔传感器采集作业速度信息,经过单片机分析和处理,将数据信息发送到DGUS显示屏上,能够实时显示播种量和播种面积。
2)采用激光传感器进行播种量检测,能够抵抗外界光线干扰;采用影像技术和DGUS屏显示,结果直观;采用漏播报警系统,减少虚警现象。
3)功能集成化程度高,能够同时监测播种量、播种面积、故障及种箱等参数。
[1] 王未.王米精密播种机触土部件CAD数据库的设计与动态分析[D].长春:吉林大学, 2006.
[2] 尹庆勇,李鸿强.基于单片机的精密播种机智能监控系统研究[J]. 廊坊师范学院学报,2015(1):33-35,40.
[3] 王祺,栗震霄,冯全.免耕播种机播种的工况监测系统设计[J]. 甘肃农业大学学报,2005(2):229-232.
[4] 宋鹏,张俊雄,李伟,等. 精密播种机工作性能实时监测系统[J]. 农业机械学报,2011(2):71-74,79.
[5] 赵继聪,周盼,秦魏. 激光传感器原理及其应用[J].科技致富向导,2011(9):102,124.
[6] 张菊秀,龙晓林.开关型霍尔传感器的应用[J].电子世界,2002(4):43.
[7] 逄淑松,程凯,刘光发,等. MSP430G2553单片机超低功耗的研究与设计[J].单片机与嵌入式系统应用 ,2013(4):1-2,10.
[8] 杨永西.精密播种机工作状况实时监测系统研究与开发[D].长春:吉林大学,2013.Abstract ID:1003-188X(2017)02-0171-EA
Research on the Monitoring System of the Precision Seeder Based on Single Chip Microcomputer and Display DGUS
Meng Pengxianga, Geng Duanyanga, Li Yuhuana, Wang Jiazhengb, Meng Fanhua
(a.School of Agricultural and Food Engineering; b.School of Science, Shandong University of Technology, Zibo 255049, China)
In order to realize the corn planter seeding process of sowing condition real-time monitoring and improve the seeding quality of corn planter, we developed the corn planter condition monitoring system based on Devon DGUS display and MCU technology. The system mainly consists of MSP430 MCU, DGUS display, storage and monitoring module, the monitoring module, the operation area, and so on. It can monitor the seed of seed in real-time monitoring, real-time monitoring and display of the amount of seeding and sowing area and the timely warning and other functions. Finally, the intelligent detection system can finish the image monitoring of the online statistics, the monitoring error of the sowing amount and the operating area.
seeding monitoring; leakage alarm; display DGUS; single chip microcomputer
2015-12-17
山东省科技计划项目(2014GNC112004)
孟鹏祥(1991-),男,山东滨州人,硕士研究生,(E-mail)mengpengxiang@163.com。
耿端阳(1969-),男,陕西澄城人,教授, (E-mail) dygxt@sdut.edu.cn。
S223.2+6
A
1003-188X(2017)02-0171-05
