齿梳拨刀式油茶果采摘装置设计与试验
2017-12-16罗时挺饶洪辉张立勇余佳佳徐谐庆刘木华
罗时挺,饶洪辉,张立勇,余佳佳,徐谐庆,李 涛,刘木华
(江西农业大学 工学院,南昌 330045)
齿梳拨刀式油茶果采摘装置设计与试验
罗时挺,饶洪辉,张立勇,余佳佳,徐谐庆,李 涛,刘木华
(江西农业大学 工学院,南昌 330045)
油茶果机械采摘是一个亟待解决的难题。为此,针对油茶果机械采摘难、效率低、易损伤花苞的现象,设计了一种齿梳拨刀式油茶果采摘装置,并通过对采摘装置工作原理和拨果原理开展理论分析,得出影响拨刀采摘效果的主要因素。同时,使用ADAMS软件模拟其运动过程,分析拨刀前端点速度、加速度、角速度和角加速度,绘制相应曲线,并对采摘装置关键零部件进行设计。采摘试验表明:设计的齿梳拨刀式油茶果采摘装置能够有效提高采摘效率并减少花苞损伤,可为油茶果的机械采摘设计提供新的思路。
油茶果;齿梳拨刀式;采摘装置;损伤
0 引言
油茶果是我国南方特有的重要木本食用油料,是与油橄榄、油棕、椰子齐名的世界四大油源树种之一[1-2]。油茶果具有很高的保健和营养价值,被联合国粮农组织列为重点的高级健康型食用植物油。江西省是油茶果的主要产区之一,全省现有油茶果面积83.7万hm2,占全省经济林面积的79.6%,为全国油茶林面积的1/3左右,在当前国家重视、政府鼓励、科技扶持、企业参与、林农自愿的发展形势下,江西省油茶果产业的发展达到前所未有的水平[3-7]。
目前,各种果实的机械化采摘方式主要包括自动化程度较高的采摘机器人和利用机械振动或气流冲击原理设计的采果机[8-10]。采摘机器人由于采摘技术难度大、成本高等原因难以推广和应用[12-13]。机械振动和气流冲击式的采果机其作用原理都是通过外力作用使果实与植株分离,由设置于果树下的承接装置接收果实来实现采摘[14-15]。由于油茶果与着果部位的枝条之间的生长力大,以上两种采摘方式对果树枝条的损伤较大,容易影响来年果实的产量。目前我国油茶果的产区主要以江西、湖南为主,目前油茶果的采摘主要依靠手工来完成,通过采用人字梯等辅助工具来进行采摘,人工挑运进行采收[11]。
油茶果的形状较为规整,大都为椭圆形,主要分布于果树的表层,果树里层的果实较为稀少。油茶果的主要特性表现为两点:一是果实与枝条之间的生长力大,且纵向拉断力大于横向扭断力;二是油茶果是花果同期,茶果进入采摘季时,花苞正含苞待放,如花苞损伤较大,将直接影响来年油茶果的产量,这给油茶果机械化采摘带来了很大的困难。
本文设计了一种齿梳拨刀式油茶果的采摘装置,针对其特性研制齿梳拨刀式油茶果采摘机,并对样机开展了试验研究,从而为后续的油茶果采摘机的研究提供参考。
1 采摘装置的工作原理及采摘原理分析
1.1 工作原理
齿梳拨刀油茶果采摘装置主要由采摘头、拨刀、拉线及长杆等结构组成,其总体结构图和三维图如图1及图2所示。
装置的工作原理是:将采摘头伸到油茶树上层长有油茶果的位置,利用采摘头之间齿梳的间隙梳到果树上的油茶果,往下拉长杆将齿梳夹紧油茶果;当油茶果夹紧后,利用轴套拉动拉环,拉环拉动拉线带动拉板运动,拉板再拉动牵拉丝、拉动拨刀运动。通过拨刀进行的加速运动,对固定在梳齿上的油茶果产生一个较大的冲击力,这种冲击力远比油茶果与树枝的连接力大,使得油茶果从树枝上顺利脱落,从而完成油茶果的采摘过程。
1.2 拨刀采摘原理
油茶果特性比较特殊,其着果部分的枝条之间的生长力较大,在果实采摘的过程中,要将果实采摘下来所需的力较大;且油茶树有果与花同期的现象,当直接拉扯果实,会对花苞造成较大损伤,影响来年油茶果的产量。因此,拨刀的运动方式采取了横向拨动,即在拨刀末端施加拉力,使其前端产生较大的速度,接触到油茶果时产生较大的冲击力,从而将果实和树枝之间的连接力消除,使果实发生掉落,其力学分析如图3所示。

1.长杆 2.拉环 3.拉板 4.固定板 5.采摘头 6.扭簧 7.拨刀 8.采摘板 9.连接板 10.拉簧 11.牵拉丝 12.拉线
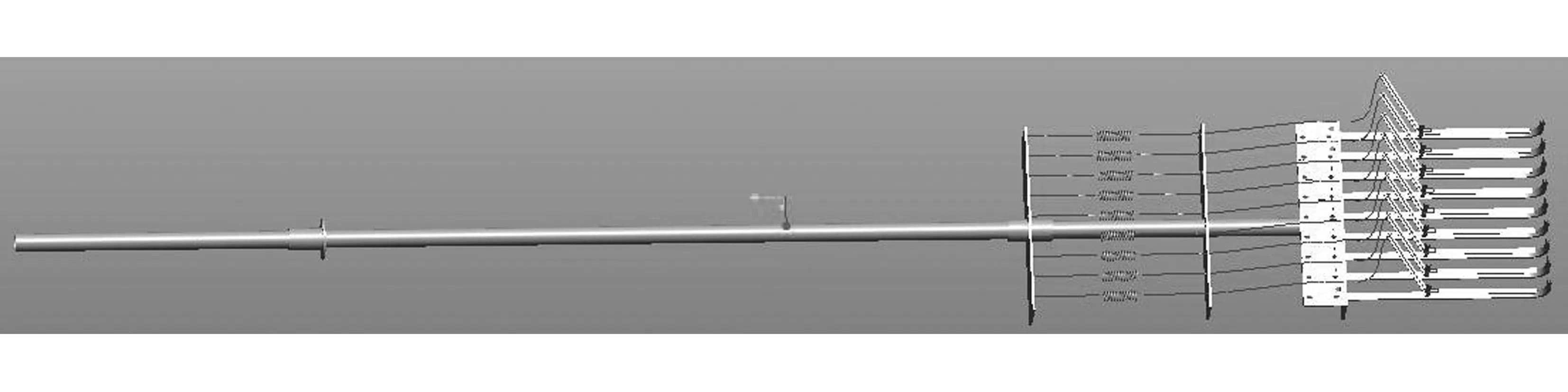
图2 采摘装置三维图
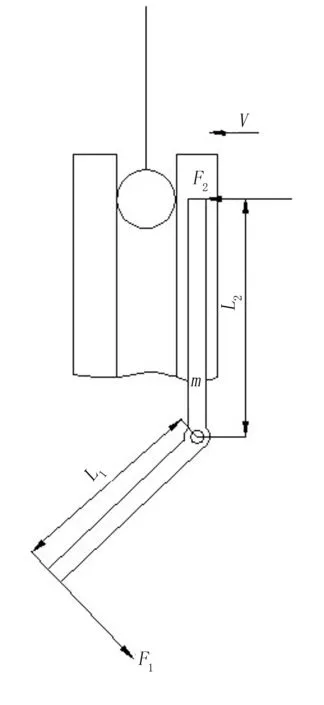
图3 拨果力学示意图
假设油茶果的形状为圆形,根据图3所示的受力分析图可得
F2L2=F1L1
(1)
M=Jα=F2L2
(2)
ω=αt
(3)
v=ωt
(4)
其中,F1为拨刀末端拉力;F2为拨刀前端拉力;L1为末端力臂长度;L2为前端力臂长度;J为拨刀的转动惯量;α为拨刀的角加速度;ω为拨刀的角速度;v为拨刀的切向速度;t为拨刀拨到油茶果所经历的时间。
由动量守恒定理可得
pt=mv
(5)
P=mv/t=3F1L1/L2
(6)
由公式(6)可看出:齿梳拨刀式油茶果采摘装置的拨刀冲击力的大小主要影响因素有拉力大小和拉力的力臂。
由上述理论分析可知:影响拨果因素的主要有拉力大小和拉力的力臂大小,所以现用ADAMS绘制不同状态下拨刀前端点角速度、角加速度、速度和加速度曲线,以验证理论分析的正确性。
当施加拉力F1=10N、L1=120mm、L2=80mm时的角加速度、角速度、速度和加速度曲线,如图4所示。
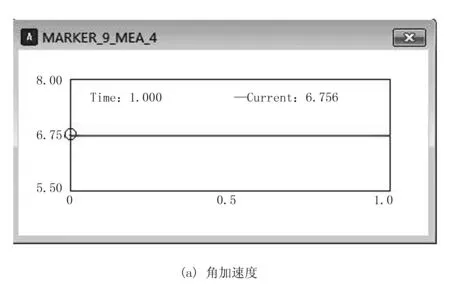
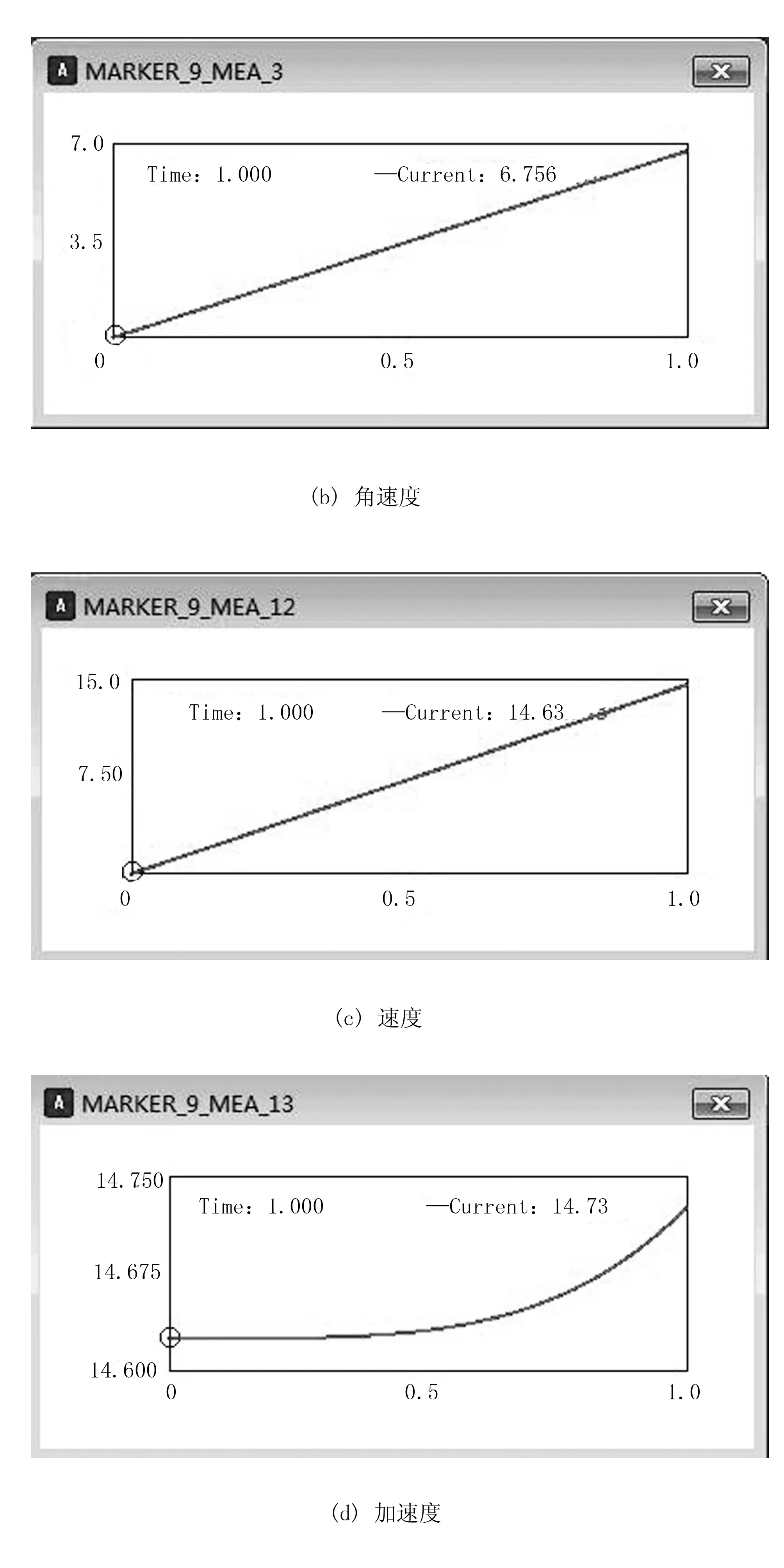
图4 F1=10N、L1=120mm、L2=80mm时ADAMS绘制的曲线图
当施加拉力F1=50N、L1=120mm、L2=80mm时的角加速度、角速度、速度和加速度曲线。
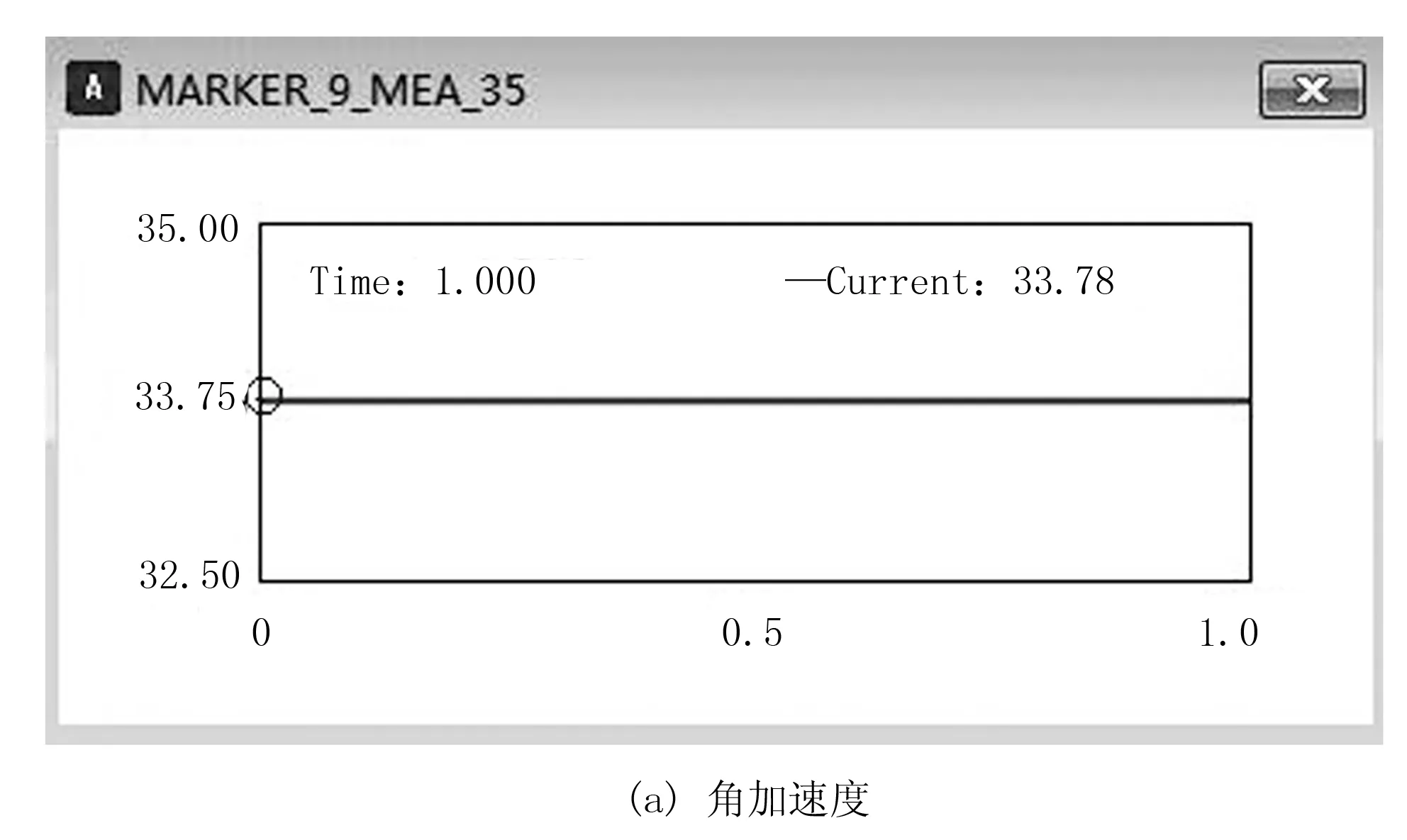
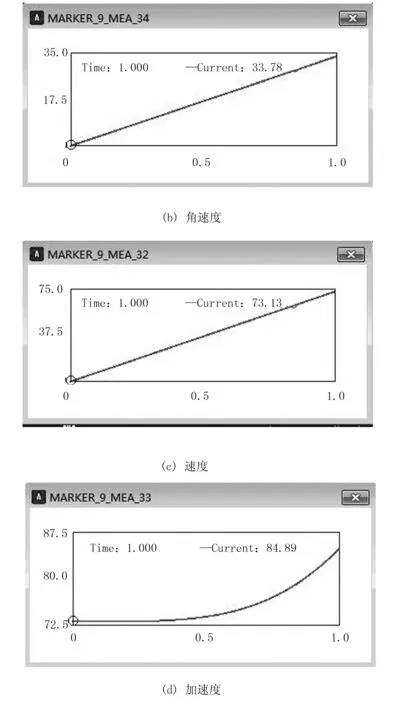
图5 F1=10N、L1=120mm、L2=80mm时ADAMS绘制的曲线图
当施加拉力F1=10N、L1=120mm、L2=100mm时的角加速度、角速度、速度和加速度曲线,如图6所示。
综合上述的图4、图5和图6得到3种不同状态下曲线的变化,可以看出:当力臂保持不变时,增加拉力大小,各项指数都有明显增大;而当拉力保持不变时,减小力臂的大小,各项指数也有相应的降低。这表明,拉力大小和力臂大小是影响冲击力大小的主要因素。
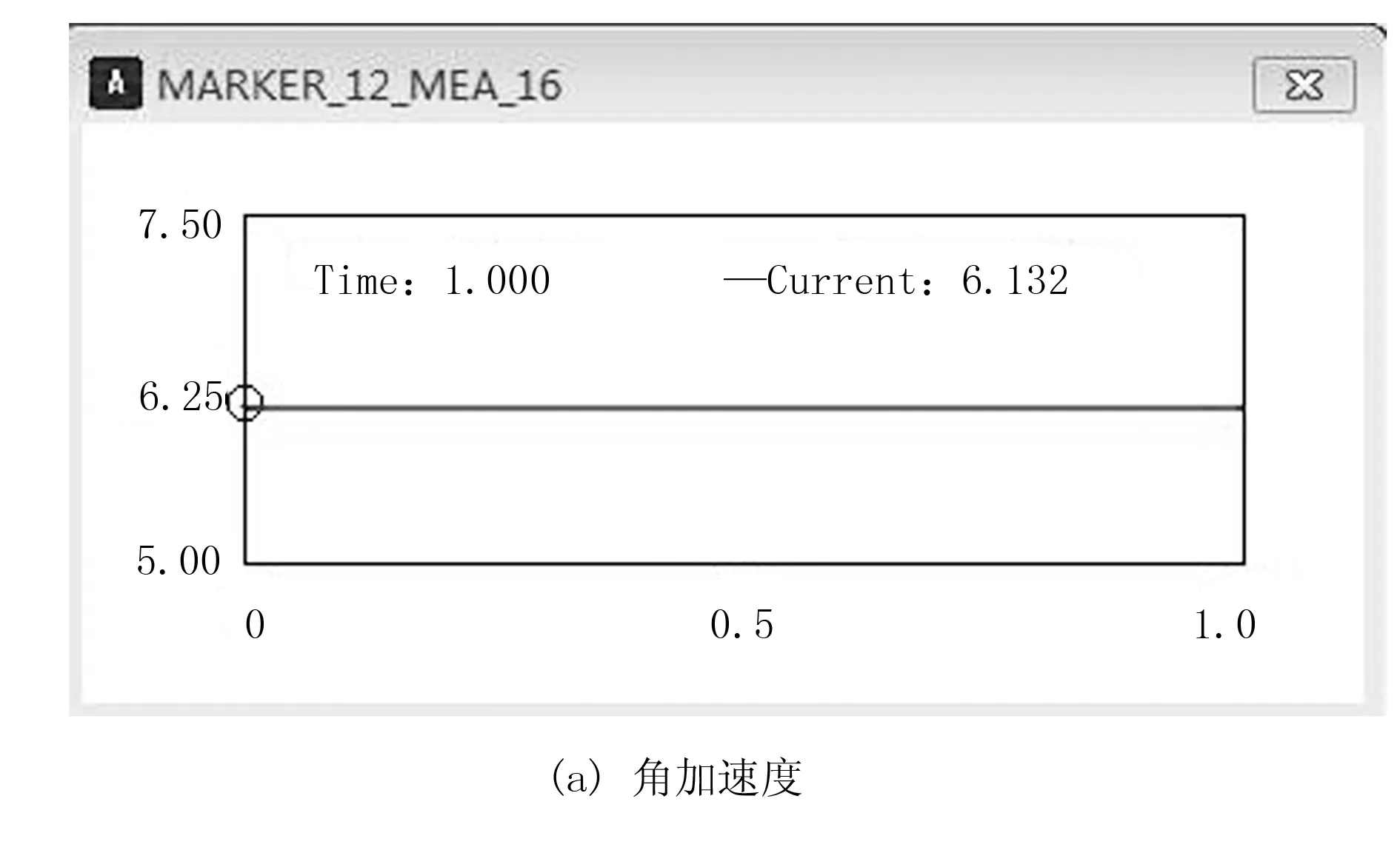
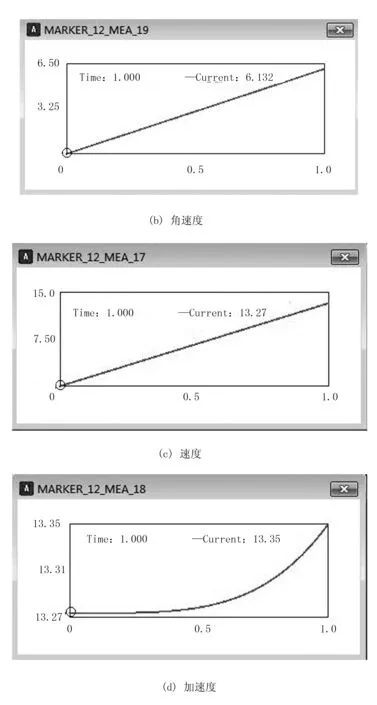
图6 F1=10N、L1=120mm、L2=100mm时ADAMS绘制的曲线图
2 齿梳拨刀式采摘装置关键零部件设计
2.1 采摘头的设计
采摘头是本装置中重要的组成部分,其作用是负责将油茶果夹紧,但必须保证花苞能够从梳齿间隙中穿过。考虑到采摘过程中需将油茶果的固定和夹紧,故将采摘头做扁平状,使其更易夹紧油茶果。
根据试验测量,油茶果的直径大小主要分布在20~50mm之间,每根采摘头的间距要保证在20mm以下。本文此次设计的装置,其之间的距离取值为15mm,长度取275mm,其分布如图7所示。
2.2 拨刀的回位和单动设计
拨刀在装置中的作用是:当采摘头将油茶果夹紧时,通过拨刀的瞬时冲击来完成油茶果的采摘和脱落。由于油茶果的脱落是通过拨刀的瞬时冲击力完成的,故拨刀末端的力矩要求必须足够大,这样才能实现在拨刀的前端位置击打油茶果的冲击力够大,所以将拨刀做成150°。拨刀形状如图8所示。
当拨刀将油茶果拨落后,要求其顺利回位才能完成下一次的采摘,其回位装置则通过安装扭簧实现。综合考虑拨刀的回位位置和拨果冲击力的大小,选用线径为1.5mm、外径9mm、内径6mm、两边脚长分别为45mm和38mm的扭簧,其装配情况如图9所示。
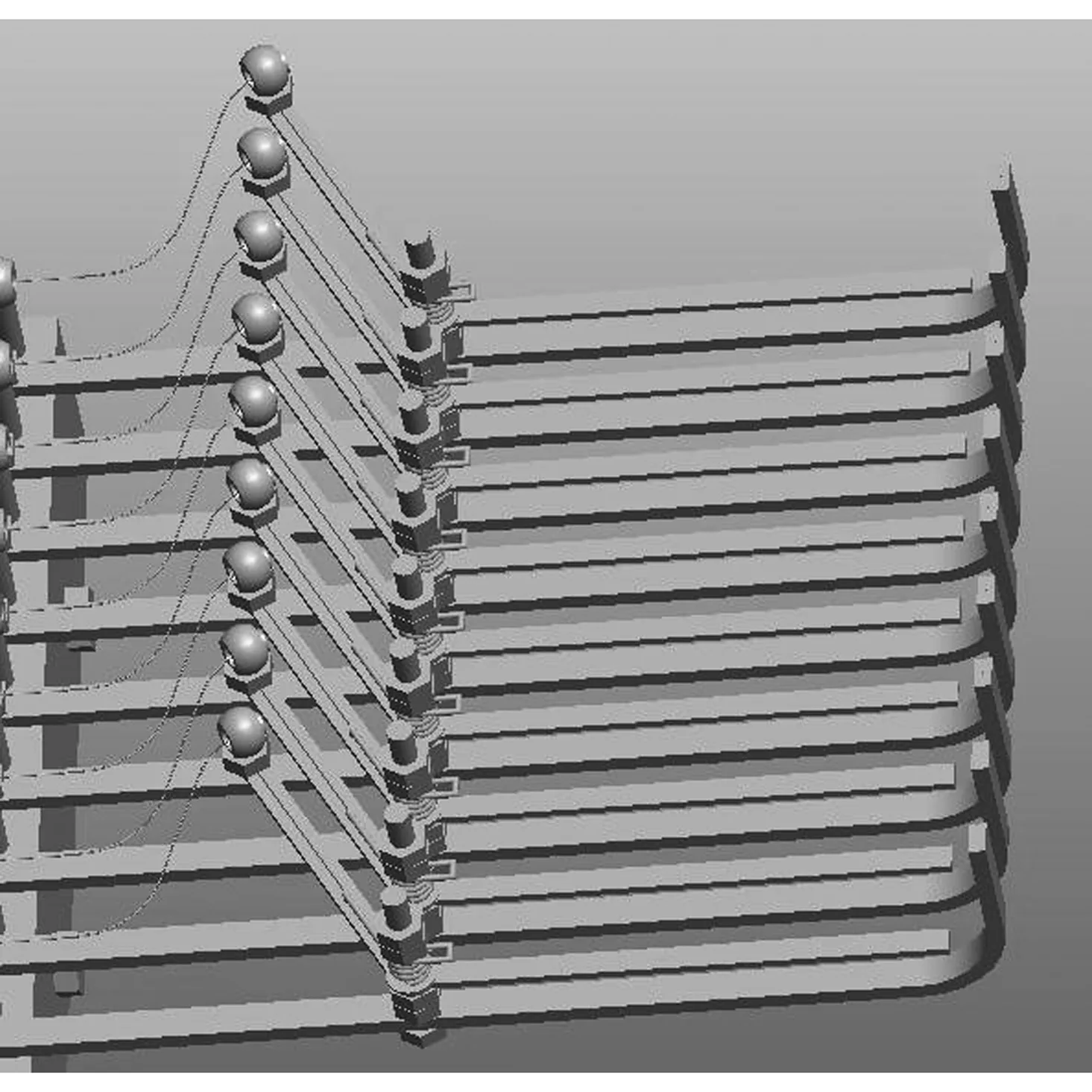
图9 扭簧分布图
油茶果树生长茂密、树枝繁多,在采摘装置作业过程中,可能会遇到树枝的阻碍。当其中一根拨刀被树枝挡住不能实现采摘时,其它并行的拨刀仍可继续工作,这主要靠安装在牵拉丝后端的拉簧实现。当拉簧拉力不够大时,则装置拨刀拨果力则不够大,所以此拉簧的选择需要拉力较大的型号,其分布情况如图10所示。
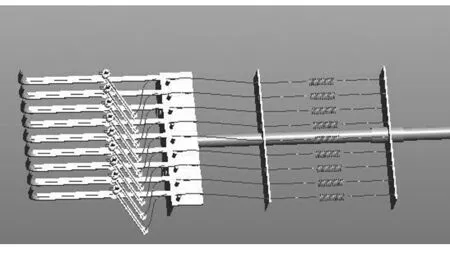
图10 拉簧分布图
3 样机试验
试验对象为江西农业大学植物标本园中种植的油茶果树,其高度大致分布在3~6m之间,油茶果果径大小不一,果径主要分布在20~40mm左右。样机采摘油茶果情况(见图11)主要是观察油茶果采摘效率和花苞损伤。

图11 装置工作图
样机试验表明:本文设计的齿梳拨刀式油茶果采摘装置相对人力采摘能有效提高油茶果采摘效率,且花苞损伤较少,初步验证了样机的有效性。由于采摘后的油茶果会直接掉落在地上,下一步应增加收集装置以进一步增强装置的实用性。
4 结论
1)针对油茶果机械采摘花果同期的特性,设计了一种低损伤油茶花苞的齿梳拨刀式油茶果采摘装置。
2)通过分析拨刀采摘原理得出影响拨刀冲击力的因素有牵拉丝拉力大小及拉力力臂,将模型导入ADAMS后进一步分析了拨刀前端点速度、加速度、角速度和角加速度曲线。
3)样机试验初步表明:相对人力采摘该装置能有效提高油茶果采摘效率。
[1] 高自成,李立君,李昕,等.齿梳式油茶果采摘机采摘执行机构的研制与试验[J].农业工程学报,2013,29(10):19-25.
[2] 冯国坤,饶洪辉,许朋,等.油茶果与油茶花苞生物力学特性试验研究[J].农机化研究,2014,36(12):187-191.
[3] 冯国坤,饶洪辉,许朋,等.油茶果机械采摘装备与技术研究现状[J].中国农机化学报,2015,36(5):125-127.
[4] 高自成, 李立君, 刘浩. 油茶果采摘机物料收集装置的选型研究与设计[J].中南林业科技大学学报,2011,31(10):168-170.
[5] 饶洪辉. 油茶果采摘机械现状及与农艺结合的措施探讨[C]//2012中国农业机械学会国际学术年会论文集.杭州:中国农业机械学会,2012:3.
[6] 刘大为,李旭,谢方平,等. 湖南油茶果采摘机械现状及其关键技术分析[C]//中国农业工程学会2011年学术年会论文集.重庆:中国农业工程学会,2011:5.
[7] 冯国坤,饶洪辉,许朋,等.影响油茶果机械化采摘的生物环境特性[J].中国农机化学报,2015,36(2):128-130.
[8] 章江丽,陈顺伟,庄晓伟, 等.南方丘陵山地果园采摘机械的现状[J].林业机械备,2014,42(9):4-7.
[9] 冯国坤,饶洪辉,许朋,等.油茶果生物力学特性便携式测试系统[J].农机化研究,2015,37(8):128-130.
[10] 金征,张伟,杨光,等.林果采摘设备发展现状与需求[J].木材加工械,2015,26(1):43-44.
[11] 刘银辉,李立君,刘浩,等.基于Pro/E的油茶果采摘机设计[J].农机化研究,2012,34(7):97-99.
[12] 李帅,周健,李立君,等.油茶果采摘机械臂工作空间分析与仿真[J].农机化研究,2015,37(3):46-49.
[13] 高自成,王朋辉,王勇桦,等.油茶果采摘机器人机械臂伺服系统选型设计[J].农机化研究,2015,37(5):140-144.
[14] 王朋辉,李立君,高自成,等.摆动式林果采摘头设计与分析[J].西北林学院学报,2015,30(5):288-291.
[15] 程学良,李立君,高自成,等.油茶果振动采摘系统运动特性分析[J].农机化研究,2014,36(2):15-19.Abstract ID:1003-188X(2017)02-0084-EA
Design and Experiment of Tooth Comb Type Device for Camellia Fruits Picking
Luo Shiting, Rao Honghui, Zhang Liyong, Yu Jiajia, Xu Xieqing, Li Tao, Liu Muhua
(College of Engineering, Jiangxi Agricultural University ,Nanchang 330045, China)
Camellia fruits harvest by machine is a dilemma to be solved. According to Camellia fruit by means of mechanical picking is difficult, inefficiency and its bud easy to injury, a tooth comb poking knife type Camellia fruits picking device is designed. Also the working principle of Camellia fruits picking by poking knife is analyzed and main influence factor of poking knife is obtained. At the same time, the curves of velocity, acceleration, angular velocity and angle acceleration of the end point of the poking knife are plotted though analyzing its motion model in ADAMS software, the key parts of the mechanism is designed to explain its characteristics as well. Final experimental tests show that the mechanism is efficient in Camellia fruits picking and low injury in Camellia buds, which can provide new thoughts for Camellia fruits picking by machine under low buds damage.
camellia fruit; tooth comb type; picking device; injury
2016-01-10
国家自然科学基金项目(51305180);江西省科技计划项目(20141BBF60057)
罗时挺(1992-),男,江西抚州人,硕士研究生,(E-mail)1187894982@qq.com。
饶洪辉(1978-),男,江西丰城人,副教授,博士,(E-mail)594671984@qq.com。
S225.93
A
1003-188X(2017)02-0084-05
