计算机模拟下的马铃薯机械化挖掘与试验研究
2017-12-16苏建华
苏建华,李 磊
(承德石油高等专科学校 计算机与信息工程系,河北 承德 067000)
计算机模拟下的马铃薯机械化挖掘与试验研究
苏建华,李 磊
(承德石油高等专科学校 计算机与信息工程系,河北 承德 067000)
针对马铃薯机械化挖掘进行试验研究,应用Pro/E进行马铃薯机械化挖掘建模,基于Adams软件进行计算机模拟仿真,设计中应多考虑马铃薯机械化挖掘中铲面碎土的能力。通过试验研究马铃薯机械化挖掘对马铃薯挖掘的影响,可优化提升马铃薯机械化挖掘工作中的适应性、降低伤薯率与损失率,对提升马铃薯机械化挖掘质量具有重要意义。
马铃薯;机械化挖掘;计算机模拟
0 引言
在我国粮食产业中,马铃薯作为小麦、水稻、玉米之后的第四大作物,具有举足轻重的作用。实现马铃薯的机械化挖掘,不仅能够适应我国当前农民对于挖掘马铃薯的农作需求,也可促使提升马铃薯挖掘效率,降低生产成本。为此,利用计算机建模结合机具试验,对振动式挖掘生产进行了研究,旨在为后续研究提供参考。
1 实现马铃薯机械化挖掘的意义
当前农业生产中,在马铃薯收获的季节,对于面积小的马铃薯区域还在采取手工方式挖掘,不仅挖掘速度慢,还容易导致马铃薯破损,影响马铃薯的收获率[1]。虽然我国对于大面积马铃薯挖掘采用机械化手段,但由于在马铃薯机械化挖掘方面的研究还处于初级阶段,并且将国外的马铃薯机械化挖掘机直接应用与我国的马铃薯挖掘中,也会受到地区、国家差异等因素的限制[2]。我国现有农业生产的机械化设备中,马铃薯机械化联合挖掘机,不仅体积大且功耗也高,往往适用进行大面积马铃薯种植区域的挖掘作业,且会由于一些种植区域的地理条件限制与马铃薯的种植模式差异,导致马铃薯机械化挖掘机使用优势大大降低。例如,在一些山地及坡地中,应用该机械化挖掘机来收获马铃薯,操作难度大。传统的马铃薯机械化挖掘机并不适合进行小地块的马铃薯挖掘作业,使得在我国不能大面积推广应用马铃薯机械化挖掘机收获[3-5]。同时,我国在研制开发马铃薯挖掘机方面缺乏精准的理论指导,在设计研制及应用方面与国外一些发达国家比还有明显的技术差距[6]。
2 计算机模拟下设计马铃薯机械化挖掘
2.1 马铃薯机械化挖掘的设计思想
在本研究中,为能够实现对于我国马铃薯挖掘机械化目标,可以高效、优质地进行机械化马铃薯挖掘,应该确保设计的马铃薯机械化挖掘机,能够向着机械作业低功耗、挖掘马铃薯低损失及节约能源的方向来开展设计。本研究中,将会结合实际的需要,运用计算机模拟技术,优化研制设计出可以与地面能够保持较少接触(规避机械化挖掘作业堵塞弊端)、降低地面地形的干扰(杜绝地理因素差异弊端)及提升明薯率的设备。
2.2 马铃薯机械化挖掘设计依据
在我国马铃薯农业生产中,对于马铃薯的种植,一般采取垄作种植的模式,对于不同的种植行间距,单株的马铃薯质量及产量方面也会存在一定差异(见表 1)。本次计算机模拟马铃薯机械化挖掘过程中,已将这些差异考虑在内。
由表1可知:不同的行间距也会对单株的马铃薯质量、产量产生影响。因此,在计算机模拟下的马铃薯机械化挖掘机设计中,应该根据马铃薯的块茎物理机械性能,优化设计马铃薯机械化挖掘机设备[7]。具体就是在设计中,根据马铃薯的大小,优化设计马铃薯机械化挖掘过程中的挖掘深度与宽度,确保能够在马铃薯垄作的切土、松土及碎土的过程之中将马铃薯与土壤共同挖起[8-10]。同时,在设计马铃薯机械化挖掘机时进行计算机模拟仿真,还需考虑铲面在工作时会被草缠住的因素,有效增强铲面破碎能力,提升马铃薯机械化挖掘铲碎土的性能,确保马铃薯机械化挖掘机能够在实践中推广应用。
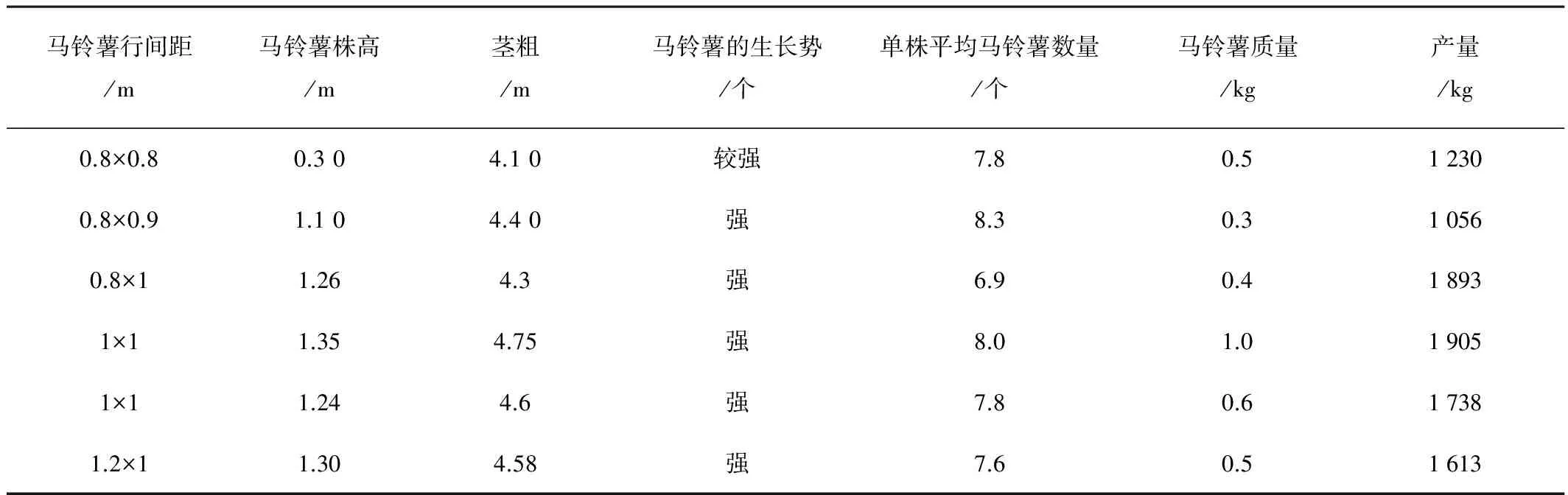
表1 差异数据
2.3 影响挖掘阻力的主要参数分析
本研究中,重要解决不同地区土壤特性差异性大,以及马铃薯挖掘机工作时适应性差、碎土能力低、明薯率低、伤薯率和损失率高等问题。基于Pro/E软件进行了强适应性小型马铃薯收获机建模,使用Adams软件进行了仿真研究,建立了工作阻力模型。通过测试挖掘机工作时挖掘铲的运动过程,入土角度调节模块如图 1所示 。

图1 挖掘铲的入土角度调节模块
由图1可以看出:挖掘铲能够将前端部分直接和马铃薯机械化挖掘机的偏心轮轴进行联接,在后端可以同挖掘铲的侧板连接轴进行联接 ,且在前后部分可以通过螺杆进行联接。挖掘铲设计中的几何关系如图2所示。
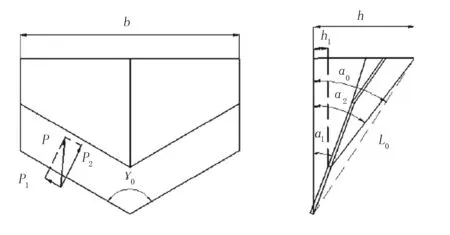
图2 挖掘铲设计
电子计算机技术的快速进步使得挖掘机的控制系统得到了先进技术的支持,促使液压挖掘机的研究重点正逐步向智能化控制系统方向转移。最大挖掘力为挖掘铲油缸设计的依据,挖掘铲油缸作用力为
(1)
式中l1—挖掘铲油缸作用力对摇臂点的力臂(此位置为摇臂长度);
lc—F1max对挖掘铲与连杆点C的力臂。
(2)

F2=0.2×F1max=27kN
(3)
2.4 马铃薯机械化挖掘机设计
基于计算机模拟,对挖掘铲进行栅格化,并进行有限元静力学分析。改善马铃薯机械化挖掘部件的工作质量,能够确保在进行马铃薯机械化挖掘工作时减小挖掘机的工作阻力,避免挖掘铲在受到土壤阻力作用产生应力变形[11-13]。在马铃薯机械化挖掘机的挖掘铲两侧,安装上切土的圆盘,可以防止掘起马铃薯过程中漏着;并且在切土圆盘入土的部分,设置300°刃角,可以轻松切开马铃薯垄。本马铃薯机械化挖掘机设计结构如图3所示。
由图3可知:马铃薯机械化挖掘机中,可改变挖掘铲入土角,但不能始终固定入土。该机安装了可调节的后轮,对挖掘机整个机架高度都有调节作用,对不同垄高种植的马铃薯都有很好的适应性;调节丝杆可调节摆动筛底面与地面的角度,使做往复运动摆动的筛子更容易将土粒抖落,不易在筛网面形成土粒的堆积,减小了牵引阻力。
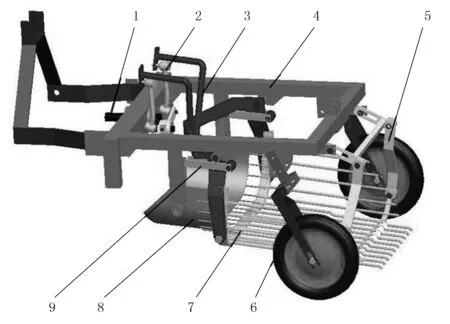
1.导向 2.曲轴 3.手柄 4.固定装置 5.连杆 6.前轮 7.凸缘 8.刀片 9.支架
3 试验研究
3.1 试验条件
本次马铃薯机械化挖掘的试验中,地点选择在A地的某阳光农场进行,时间期限是 2015 年 11 月 10 日-12 月12日,试验期间的温度保持在( 17 ±2.3)℃,试验区域的土壤类型是红壤土;选择的试验地面积0.24hm2,马铃薯垄高20cm,株距18cm,垄宽50cm,马铃薯的结薯深度 10~20cm。
3.2 试验方法
试验中,结合马铃薯机械化挖掘机特点及性能,根据 GB5262标准中农业机械试验条件测定方法的规定,进行马铃薯机械化挖掘试验。
3.3 试验指标测定
在基于计算机模拟优化设计马铃薯机械化挖掘机试验研究中,可以测定马铃薯的明薯率、伤薯率、挖净率及埋薯率指标。

3.4 试验结果分析
通过本试验,得出马铃薯机械化挖掘机的结果,如表3所示。

表3 马铃薯机械化挖掘性能结果
4 结论
利用Pro/E软件对强适应性马铃薯机械化挖掘机建模,在Adams软件中进行仿真研究,分析了动铲对马铃薯挖掘性能的影响,得知振动式挖掘铲具有减阻、防堵、适应性强及可靠性高等优点。
综上所述,在计算机模拟下优化设计马铃薯挖掘机,并进行试验验证,证实该马铃薯挖掘机在计算机模拟下能够胜任挖掘马铃薯的工作,不仅能够解决传统马铃薯挖掘机工作时适应性差、碎土能力低、明薯率低、伤薯率和损失率高等问题,也可以提升马铃薯的挖掘效率。
[1] 江立凯,马旭,武涛,等.南方冬种马铃薯收获机的应用现状与研究展望[J].农机化研究,2016,38(7):263-268.
[2] 吴金娥,吕金庆,杨颖,等.基于 ADAMS 的马铃薯挖掘机运动学仿真[J].农机化研究,2016,38(2):31-34.
[3] 邓伟刚,王春光,孙宏,等.马铃薯挖掘机挖掘铲力学模型构建[J].农机化研究,2014,36(1):84-86.
[4] 吴建民,李辉,孙伟,等.拨指轮式马铃薯挖掘机试验[J].农业工程学报,2011,27(7):173-177.
[5] 吕金庆,田忠恩,杨颖,等.4U2A型双行马铃薯挖掘机的设计与试验[J].农业工程学报,2015(6):17-24.
[6] 吕金庆,田忠恩,吴金娥,等.4U1Z型振动式马铃薯挖掘机的设计与试验[J].农业工程学报,2015(12):39-47.
[7] 高海明.小型马铃薯挖掘机的设计与试验研究[D].乌鲁木齐:新疆农业大学,2014.
[8] 张华,吴建民,孙伟,等.4UM -640型振动式马铃薯挖掘机的设计与试验[J].干旱地区农业研究,2014(2):264-268.
[9] 李涛,康璟,孙伟,等.4U-1000型马铃薯挖掘机的设计与试验[J].甘肃农业大学学报,2013,48(3):151-155.
[10] 戴飞,杨杰,赵武云,等.振动式阶梯铲状马铃薯挖掘机作业性能试验[J].干旱地区农业研究,2014(3):263-267.
[11] 吴建民,李辉,孙伟,等.拨指轮式马铃薯挖掘机设计与试验[J] .农业机械学报,2010, 41(12):76-79.
[12] 刘宝,张东兴,李晶.MZPH-820 型单行马铃薯收获机设计[J] .农业机械学报, 2009, 40(5):81-86.
[13] 文学洙, 廉哲满.振动式挖掘机的设计与试验[J].农业机械学报, 2006,37(10):77-82.
Potato Mechanization Mining and Experimental Research on Computer Simulation
Su Jianhua , Li Lei
(Chengde Petroleum College Department of Computer & Information Engineering,Chengde 067000, China)
According to the mining mechanization of potato were studied, using Pro/E software of potato machinery mining modeling.Based on ADAMS software for computer simulation, in the design of multi consider shovel surface soil crushing capacity, by introducing the soil compression and damage theory, the establishment of measure broken soil properties of the mathematical model, through test and study of potato mechanization mining for potato digging effect, so as to optimize the promotion of potato mechanized mining work adaptability, reduce the rate of tuber damage and loss rate, enhance potato mechanization mining quality, play a positive impact.
potato; mechanized mining; computer simulation
2016-03-30
承德市科学技术研究与发展计划项目(201422104)
苏建华(1979-),男,陕西汉中人,讲师,硕士,(E-mail)sujianhua079830@163.com。
李 磊(1978-),男,河北承德人,讲师,硕士。
S225.7+1
A
1003-188X(2017)02-0167-04
