基于任务协同的有人机/无人机对海攻击作战效能评估研究
2017-12-13王光源毛世超章尧卿
王光源,孙 涛,毛世超,章尧卿
(海军航空大学,山东烟台264001)
基于任务协同的有人机/无人机对海攻击作战效能评估研究
王光源,孙 涛,毛世超,章尧卿
(海军航空大学,山东烟台264001)
通过分析攻击敌海上舰船目标过程中有人机/无人机编队的作战使用方式及影响其作战效能的主要因素,建立了有人机/无人机编队协同攻击海上目标的作战效能评估指标体系,运用ADC法构建了有人机/无人机混合编队攻击敌舰船目标作战效能评估模型,通过算例证明了该方法适应于有人机/无人机编队的作战效能评估,为有人机/无人机协同作战决策提供了有效的参考依据。
有人机/无人机;海上目标;ADC;协同攻击;效能评估
自以色列在贝卡谷地空战中利用无人机遂行作战任务以来,无人机在战争中充当着越来越多的角色,从遂行空中侦察、战场监视、通信中继和战斗毁伤评估等作战支援任务,发展到担负压制敌方防空系统(SEAD)和对敌攻击等主要作战任务[1-2]。
无人作战飞机(简称无人机)具有价格低廉,不惧伤亡,隐蔽性好,生命力强,滞空时间长等特点[3],不仅能在战场上与有人战斗机并肩作战,而且能在某些情况下替代有人机,遂行作战任务,毋庸置疑,无人机将逐渐成为夺取制空权的主力军[4]。但是无人机的智能化水平不可能在短期内达到自主完成作战任务的程度,因而在相当长的一段时间内,由有人机与无人机组成编队协同作战将是典型的作战使用模式[5-6]。
随着我国国家利益的拓展,对海军遂行远海护卫能力有了新的需求,对于舰艇编队来说,合理运用舰载有人机/无人机进行协同作战可有效拓展舰艇编队的监控、打击范围,提高应急处突能力[7-8],准确掌握有人机/无人机编队的作战效能对其协同作战使用具有重要意义。由于有人机/无人机协同作战使用是一个复杂过程,本文以现有有人机/无人机装备担负对海上目标攻击任务为背景,运用ADC评估理论方法[9],采用定性与定量相结合的方式对有人机/无人机协同攻击海上舰船目标的综合效能进行了建模和评估研究。
1 基于任务协同的对海攻击模式分析
有人机/无人机协同作战一般是指由有人机担任空中指挥所的职责,配置数架无人机共同组成空中编队,完成作战任务的过程。按照美国国防部《2011-2036无人系统综合路线图》定义,有人无人编队是指有人与无人系统为执行相同任务而建立的编队,通过互联互通互操作和资源共享以达成共同目标[10]。根据协同属性不同,可以分为基于任务协同、阶段协同、层次协同和对象协同4种方式。本文主要研究基于任务的协同使用方式。基于任务协同的对海攻击作战是指在作战过程中,无人机通过遂行信息支援、探测、防御和攻击海上目标的协同任务,配合有人机完成有人机/无人机编队的预警探测、协同指挥、协同攻击海上舰船目标的任务[11]。
根据舰艇编队舰载有人机/无人机承担的作战任务和武器装备使用情况,本文主要研究有人机/无人机编队攻击海上舰船目标,其中无人机以承担协同攻击任务的方式展开作战行动。编队设定由1架有人机作为长机,2架无人机协同攻击组成。由于编队协同作战使用中涉及战场信息的获取、评估、指挥导引等复杂过程,影响其作战效能的因素较多,并且相关因素指标的物理属性互有不同,是典型的多属性的作战效能评价问题[12-13],本文采用简便多属性ADC评价方法,开展了基于任务协同的有人机/无人机对海攻击作战效能的综合评价问题研究。
2 评价指标体系的分析与构建
根据有人机/无人机编队的组成、使用特点和实战环境下对编队遂行作战任务的主要影响因素[14-17],在充分考虑其系统性、可比性、独立性、层次性、客观性的基础上构建了有人机/无人机编队协同攻击海上舰船目标的作战效能评估指标体系[18]。本文将整个作战机群编队抽象为一个武器作战系统,其可用性A主要由编队系统的故障率和维修率组成,可信性D主要由编队系统的任务规划可靠性、编队系统可靠性和数据链可靠性组成,能力C主要从协同探测、协同指挥和协同攻击3个方面来分析编队的作战效能,见图1。
3 有人机/无人机协同对海攻击的作战效能评估模型
ADC模型[19-20]是美国工业界武器系统效能评估咨询委员会提出的效能评估模型,其数学解析式为:
式(1)中:E表示系统的综合作战效能,是对系统完成任务能力的综合量度,通常用概率值表示;A为可用性向量,A=[ ]a1,a2,…,an,n为系统在开始执行任务时的状态数目,ai为开始执行任务时处于i状态的概率;D为N×N的可信度矩阵;C表示系统的能力,是对系统在不同状态下完成任务能力的量度。
3.1 有人机/无人机编队系统的可用性矩阵
有人机/无人机协同对海攻击的作战样式如图2所示。由图2可知,有人机/无人机编队系统是由有人机系统和无人机系统串联组成,其中无人机系统由2个无人机单机系统并联构成。
对于有人机系统和无人机系统来讲,通常分为可用状态和不可用状态,但是由于无人机系统存在并联关系,所以整个有人机/无人机编队系统存在3种状态,从而确定系统可用性向量A为
式中:a1为有人机系统和2个无人机系统均处于正常工作状态的概率;a2为有人机系统和1个无人机系统处于正常工作状态,另1个无人机系统处于故障状态的概率;a3为有人机系统故障或2个无人机系统故障均出现故障或者有人机系统和2个无人机系统均出现故障的概率。
对任一单平台系统,其正常工作状态的概率为:
式(2)中:MTBF为系统平均故障间隔时间;MTTR为系统平均故障修复时间。
在可靠性理论中,系统可靠度一般服从指数分布,即:
式(3)中:λ为系统的故障率;μ为系统的维修率。
根据有人机/无人机编队系统可能存在3种状态从而得其可用性向量A为:
式(4)中:aM、aU分别为有人机系统、无人机系统处于正常工作的概率;MMTBF、UMTBF分别为有人机系统、无人机系统平均故障间隔时间;MMTTR、UMTTR分别为有人机系统、无人机系统平均故障修复时间。
3.2 有人机/无人机编队系统的可信度矩阵
有人机/无人机编队系统在执行任务的过程中只有正常工作和故障2种状态,根据系统可能的初始状态到执行任务过程中可能发生的状态转移,其可信度矩阵为:
式(5)中:dij(i=1,2,3;j=1,2,3)表示开始执行任务时编队系统处于ai(i=1,2,3)状态,任务完成时编队系统处于aj(j=1,2,3)状态。
显然,有人机/无人机编队系统在执行任务的过程中发生的故障是不可修复的。因此,在开始执行任务时,若某一作战平台系统处于故障状态,则任务完成后该系统仍处于故障状态。显然,得d21=d31=d32=0、d33=1。
假设编队系统执行任务时的故障率服从指数分布,则有人机/无人机编队系统的可信度矩阵为:
式(6)中:λM和λU分别为有人机系统和无人机系统的故障率;TM和TU分别为有人机系统和无人机系统执行任务的工作时间。
3.3 有人机/无人机协同对海攻击的能力矩阵
有人机/无人机协同对海攻击的能力是指编队系统完成对敌方海上目标攻击任务的程度,一般由最终目标的毁伤概率来表示。这个概率与编队系统在整个协同作战过程中的状态密切相关,在相同的有人机/无人机编队系统中,系统所处的状态不同,其完成攻击任务的概率也不同。本文建立的有人机/无人机协同对海攻击的能力矩阵为,其中,cj为系统在执行任务过程中处于第j种状态时完成任务的能量值。
本文中,有人机/无人机编队在执行攻击任务的过程中可能处于3种状态,第1种为有人机系统/无人机系统均处于正常工作状态,第2种为有人机系统和1个无人机系统处于正常工作状态,第3种为有人机系统故障或2个无人机系统故障的状态,其对应的作战能力矩阵为。显然,当编队系统处于第3种状态时,c3=0。根据本文建立的有人机/无人机编队协同攻击海上目标的作战效能评估体系,编队系统的作战能力主要由预警探测能力Cm、协同指挥能力Cn、协同攻击能力Cp构成,则有人机/无人机编队的作战能力矩阵可表示为:
式(7)中:c1m、c1n、c1p分别为有人机/无人机编队系统第1种状态下的预警探测能力值、协同指挥能力值和协同攻击能力值;c2m、c2n、c2p分别为有人机/无人机编队系统第2种状态下的预警探测能力值、协同指挥能力值和协同攻击能力值。
在不同海况条件下,某型无人机系统与有人机系统协同对海上大、中、小三型目标作战的能力数据可查阅相关机型的技术手册,即c2m、c2n、c2p可通过查阅得到具体数值,进一步求得有人机/无人机编队系统第1种状态下的c1m、c1n、c1p分别为:。
4 算例分析
假设有人机系统的平均故障间隔时间为1 000 h,平均修理时间为50 h,无人机系统平均故障时间为2 000 h,平均修理时间为100 h,在3级海况下,针对海上中型目标,执行任务为6min,通过查阅某型无人机的技术手册得到该型无人机与有人机系统协同对海上目标的作战能力指标如表1所示。
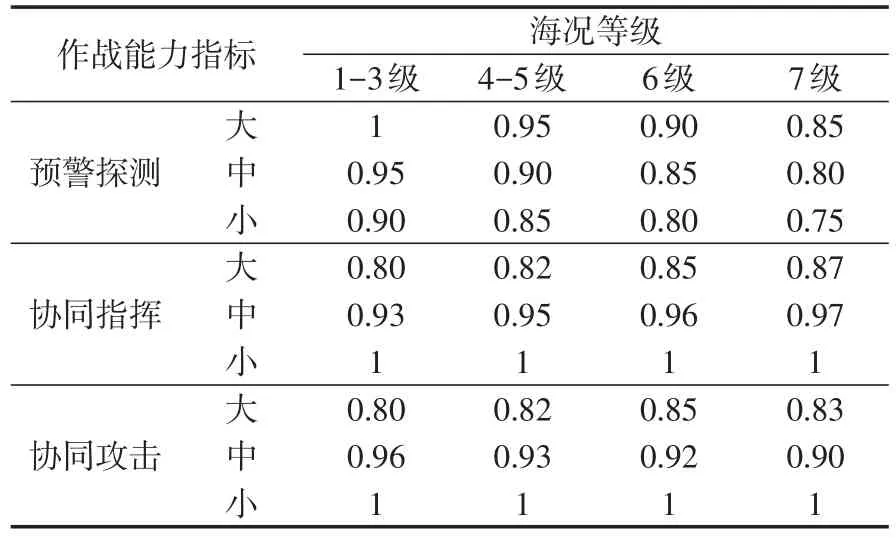
表1 某型无人机对海上目标作战能力指标Tab.1 Indicators for the effectiveness assessment for attack on maritime targets of a type of unmanned aerial vehicles
有人机/无人机编队作战效能计算步骤为:
1)计算编队系统的可用性矩阵。根据式(2)得:
从而根据式(4)求得可用性向量为:
2)计算编队系统的可信度矩阵。根据式(3)得:
从而根据式(6)求得可信度矩阵为:
3)计算编队协同对海攻击的能力矩阵。根据想定海况和拟攻击目标,查表1得单无人机作战系统的能力数据为:。由式(8)得有人机/无人机编队系统正常工作状态下的作战能力数据为:,进一步求得:E=A⋅D⋅C=0.922 3。
5 结束语
本文通过基于任务协同的有人机/无人机编队对海上目标的作战使用方式,采用定性与定量相结合的ADC评估方法建立了有人机/无人机编队协同对海攻击的效能评估评价体系,并运用ADC模型对有人机/无人编队的作战效能进行了量化分析,经计算验证,将ADC模型应用于有人机/无人机对海攻击的作战效能评估合理、可行,符合协同作战的规律,为无人机/有人机的作战训练使用提供了有效的决策支撑与帮助。
[1]蔡俊伟,龙海英,张昕.有人机/无人机协同作战系统关键技术[J].指挥信息系统与技术,2013,4(2):10-14.CAI JUNWEI,LONG HAIYING,ZHANG XIN.Key technologies for cooperative combat system of manned/unmanned aerial vehicles[J].Command Information System and Technology,2013,4(2):10-14.(in Chinese)
[2]CAMBONE S A,KRIEGR,PACE P,et al.Unmanned aircraft system roadmap 2005-2030[R].Washington D.C.:Office of the Secretary of Defense,2005:1-9.
[3]董彦非,崔巍,张旺.有人机/无人机协同空战效能评估的综合指数模型[J].飞行力学,2014,32(5):472-476.DONG YANFEI,CUI WEI,ZHANG WANG.Integrated index model for cooperative air combat effctiveness assessment of manned/unmanned vehicles[J].Flight Dynamics,2014,32(5):472-476.(in Chinese)
[4]董彦非,张旺,崔巍.有人机/无人机协同空地攻击效能评估的综合指数模型[J].火力指挥与控制,2015,40(2):58-62.DONG YANFEI,ZHANG WANG,CUI WEI.Synthesized index model for cooperation of manned/unmanned fighters in air-to-ground attacking effectiveness assessment[J].Fire Controlamp;Command Control,2015,40(2):58-62.(in Chinese)
[5]祝小平,周洲.作战无人机的发展与展望[J].飞行力学,2005,23(2):1-4.ZHU XIAOPING,ZHOU ZHOU.Development and outlook of the tactical unmanned air vehicle[J].Flight Dynamics,2005,23(2):1-4.(in Chinese)
[6] WILSON J R.Unmanned aerial vehicles get ready for prime time[J].Military and Aerospace Electronics,2009,20(7):35-41.
[7]THOMAS J.Cooperative engagement:concept for a near team air-to-air unmanned combat aircraft system[R].Washington D.C.:USAForce,2006:12-23.
[8]CC-AIR-IZMIR WG CDR J M PAIGE GBR AF.UAVs are set to mature[J].The Journal of the JAPCC,2006(3):1-3.
[9]陈强,陈长兴,陈婷,等.基于ADC模型的数据链系统作战效能评估[J].火力指挥与控制,2016,41(1):72-76.CHEN QIANG,CHEN CHANGXING,CHEN TING,et al.Effectiveness evaluation of data link system based on ADC method[J].Fire Controlamp;Command Control,2016,41(1):72-76.(in Chinese)
[10]高遐,熊健.有人机/无人机协同概念及相关技术[J].电讯技术,2014,54(12):1612-1616.GAO XIA,XIONG JIAN.Concept and relevant technologies of cooperative operation for manned-unmanned aerial vehicles[J].Telecommunication Engineering,2014,54(12):1612-1616.(in Chinese)
[11]刘跃峰,张安.有人机/无人机编队协同任务分配方法[J].系统工程与电子技术,2010,32(3):584-588.LIU YUEFENG,ZHANG AN.Cooperative task assignment method of manned/unmanned aerial vehicle formation[J].Systems Engineering and Electronics,2010,32(3):584-588.(in Chinese)
[12]王焱.有人/无人机协同作战[J].电讯技术,2013,53(9):1253-1258.WANG YAN.Cooperative attack for manned/unmanned aerial vehicles[J].Telecommunication Engineering,2013,53(9):1253-1258.(in Chinese)
[13]傅裕松,黄长强,韩统,等.飞机空战能力评估指数模型[J].电光与控制,2009,16(9):24-28.FU YUSONG,HUANG CHANGQIANG,HAN TONG,et al.Synthesized index model for air combat capability assessment of fighter aircrafts[J].Electronics Opticsamp;Control,2009,16(9):24-28.(in Chinese)
[14]孙晓闻.无人/有人机协同探测/作战应用研究[J].中国电子科学研究学报,2014,9(4):321-324.SUN XIAOWEN.Application research for cooperative detection combat of unmanned/manned aerial vehicles[J].Journal of CAEIT,2014,9(4):321-324.(in Chinese)
[15]姜禹呈,郭基联.有人机/无人机协同效果评估模型设计[J].军事运筹与系统工程,2016,30(3):28-31.JIANG YUCHENG,GUO JILIAN.Design of assess men model for cooperative effects for manned/unmanned aerial vehicles[J].Military Operations Research and Systems Engineering,2016,30(3):28-31.(in Chinese)
[16]岳源,董彦非,徐冠华,等.面向任务的有人机/无人机协同对地攻击概率模型[J].火力与指挥控制,2015,40(2):53-57.YUE YUAN,DONG YANFEI,XU GUANHUA,et al.Task oriented for cooperation of manned/unmanned fighters in air-to-ground attacking probability model[J].Fire Controlamp;Command Control,2015,40(2):53-57.(in Chinese)
[17]刘刚,叶广庆,汪民乐.攻防对抗环境下无人侦察机作战效能评估[J].战术导弹技术,2010(3):34-36.LIU GANG,YE GUANGQING,WANG MINLE.Research on operational effectiveness evaluation of UAV in attack-defense encounter interaction[J].Tactical Missile Technology,2010(3):34-36.(in Chinese)
[18]李海敏,单体岗.基于ADC法的自航水雷武器系统作战效能评估[J].舰船电子工程,2015,35(2):136-140.LI HAIMIN,SHAN TIGANG.Operational effectiveness evaluation for SLMM weapon system based on ADC theory[J].Ship Electronic Engineering,2015,35(2):136-140.(in Chinese)
[19]鞠巍,童幼堂,王泽.基于改进的ADC法的反舰导弹武器系统效能评估模型[J].战术导弹技术,2010(3):19-22.JU WEI,TONG YOUTANG,WANG ZE.Classic arithmetic of effectiveness evaluation model of the anti-ship missile weapon system[J].Tactical Missile Technology,2010(3):19-22.(in Chinese)
[20]王光源,沙德鹏,张有志,等.基于实战环境的反舰导弹武器系统作战效能评估[J].海军航空工程学院学报,2017,31(1):105-110.WANG GUANGYUAN,SHA DEPENG,ZHANG YOUZHI,et al.Combat effectiveness evaluation of anti-ship missile weapon system based on actual combat environment[J].Journal of Naval Aeronautical and Astronautical University,2017,31(1):105-110.(in Chinese)
Research on Effectiveness Assessment for Attack Against Maritime Targets of Manned/Unmanned Vehicles Based on Mission Cooperative
WANG Guangyuan,SUN Tao,MAO Shichao,ZHANG Yaoqing
(Naval Aviation University,Yantai Shandong 264001,China)
By analyzing the combat style of manned/unmanned vehicles and main factors affecting the effectiveness of the operation during the attack against enemy maritime targets,this paper has set up the system of evaluation indicators for the effectiveness assessment for cooperative attack on maritime targets of manned/unmanned vehicles and constructed ADC model.Finally,the numerical example proved the validity and reliability of the model.It also provides an effective reference for the coordinated operation of manned/unmanned vehicles.
manned/unmanned vehicles;maritime target;ADC;cooperative attack;effectiveness assessment
E843
A
1673-1522(2017)05-0491-05
10.7682/j.issn.1673-1522.2017.05.015
2017-03-27;
2017-05-20
王光源(1964-),男,教授,博士。
