夜航探照灯车控制系统设计
2017-12-08朱存清
朱存清, 李 宏
(宁波大学 信息科学与工程学院,浙江 宁波 315211)
夜航探照灯车控制系统设计
朱存清, 李 宏
(宁波大学信息科学与工程学院,浙江宁波315211)
设计了一种夜航探照灯车控制系统,包括主控器、数据采集/驱动板、遥控装置三部分,其中主控器用于灯车监控视频和工作参数的显示,同时接收塔台遥控装置发送的无线指令控制灯车。数据采集/驱动板包含两部分:数据采集板,用于对探照灯的工作参数进行采集,包括探照角度、工作电流和电压,且利用传感器并通过电气隔离的方法实现直流信号的高精度测量;电气驱动板,用于实现灯光和探照角度控制,采用汽车电子行业成熟稳定的控制器局域网(CAN)总线进行通信。塔台遥控装置通过2.4 GHz频段与主控器进行通信,组成星状网络控制任意一台灯车。测试表明:灯车控制系统参数测量精度保持在1 %以内、通信稳定可靠、功能和性能均符合系统设计要求。
灯车控制系统; 控制器局域网总线; 传感器; 电气隔离测量; 星状无线网络
0 引 言
机场助航灯光是确保飞机起飞、降落阶段飞行安全的重要措施, 能够在夜间和昏暗的天气情况下,作为机场跑道和滑行道的重要引导标志,引导飞行员正确的起飞、降落和滑行[1,2]。
随着航空事业的迅速发展,对发展先进的助航灯光布灯设备也提出要求,夜航飞行时,着陆探照灯手根据信号灯指示,操控探照灯车的开、关等状态。灯手工作于噪音大于70 dB的驾驶室内,长时间保持精力高度集中,容易造成视觉和身体疲劳,产生操作不及时或误操作。针对现有保障模式的弊端,在不改变探照灯车原有结构和指挥习惯的情况下,由塔台指挥员和探照灯手共同对探照灯车实现操控,可极大减轻灯手的工作强度,有效保障飞行安全。
本文介绍了一种夜航"探照灯车"控制系统,该系统以STM32,液晶显示器(LCD)等作为载体,与μC/OS-II,emWin协调工作,实现了整个软硬件系统,并组建了星状无线网络,控制任意一台灯车的工作状态。系统同时能够采集灯车的各种工作参数,并显示于主控器的LCD。
1 控制系统总体结构
控制系统分为主控器、数据采集/驱动板、塔台遥控装置、控制器局域网(controller area network,CAN)通信电路等。主控器响应按键的功能,将控制信息通过CAN网络的差分信号线发送至电气驱动板以控制探照灯,同时接收数据采集板的多个传感器上传的工作参数并显示在液晶上[3],当主控器收到塔台发送的无线指令时,通过CAN总线下传至数据采集/驱动板控制探照灯,主控器对通信状态进行检测,发现故障及时提示并报警。CAN通信具有很强的抗干扰能力,通信出现故障时,会在显示界面提示[4]。塔台遥控装置采用射频模块,与灯车组成星状网络,控制网络内任意一台灯车的工作状态,灯车的故障信息也能通过无线网络上传至塔台遥控装置。
2 硬件平台设计
2.1 主控器
主控器以STM32为核心,配合电源电路、静态随机存储器(static random access memory,SRAM)、液晶显示器(liquid crystal display,LCD)、报警电路、复位电路、时钟电路、闪光灯(FLASH)、摄像头、无线数传模块等外设,通过CAN总线向数据采集/驱动板发出指令,从而控制探照灯的工作状态,同时数据采集/驱动板采集的参数亦通过CAN总线上传至主控器;LCD和触摸屏电路是人机交互的主要手段,显示器显示灯车工作状态、工作参数;车载摄像头OV7670将拍摄的监控视频实时显示在LCD上,方便探照灯手查看[5];无线数传模块用于接收塔台遥控装置发送的无线控制信号,同时反馈无线信号给塔台,并与塔台遥控装置组成星状网络;报警电路用于当灯车的工作状态出现异常时,自动报警提醒灯手;系统使用车体自带12 V电源为主控器和数据采集/驱动板供电,主控器硬件结构框图如图1所示。

图1 主控器硬件结构框图
2.2 数据采集/驱动板
数据采集/驱动板的供电电源采用车载电源12 V,与CAN总线共同由四芯电缆传输,一方面数据采集/驱动板将传感器采集到的信息打包成CAN数据帧,通过CAN总线向上传输并在LCD上显示,另一方面从CAN总线上接收控制信息,并控制固态继电器和步进电机,实现灯光和探照角度控制。各种控制信号与强电设备相连时,采用光耦、固态继电器隔离,数据采集/驱动板的结构框图如图2所示。

图2 数据采集/驱动板硬件结构框图
2.3 塔台遥控装置
遥控装置结构框图如图3所示,采用NRF24L01P作为射频芯片,芯片具有如下特点:2.4 GHz全球开放的ISM频段,免许可证使用;最高工作速率2 Mbps,高效的GFSK调制,抗干扰能力强;125个可选频道,满足多点通信和调频通信的需要。该芯片集成NORDIC的Enhanced Shock Burst协议,再配上外置天线,组合成(NRF24L01P+PA+LNA),以250 kbps的通信速率,在开阔环境、无干扰情况下具有1 km的传输距离,遥控装置能与多台灯车组成星状网络,通过无线网络节点监视和控制探照灯的工作状态,如果探照灯的工作参数出现异常,则自动上传至塔台遥控装置显示界面,当遥控装置与灯车通信出现问题时,遥控装置自动蜂鸣器报警,从而提高机场的整体运行效率[6]。

图3 遥控装置硬件结构框图
2.4 电流检测电路
ACS712—30A由铜传导电流通路和高精度、低偏移、线性的霍尔传感器构成,被测电流流过的线路内阻仅1.2 mΩ,功耗很低。被测电流流过的通路与传感器5~8引脚之间绝缘,绝缘电压大于2.1 kV RMS。流过铜传导路径的电流产生磁场,能够被片内的霍尔集成芯片感应并转换为对应的高精度电压输出,其灵敏度为66 mV/A[7],将芯片的IP+脚短接在一起,IP-脚短接在一起,短接后连接到测试端口,测试电流时串联到被测电路中即可。给芯片5 V供电,在6脚接上一个1 nF 电容器即可增加频带宽度和抗干扰能力[8],电流检测电路如图4所示。理论上,初始零电流偏压为VCC/2,经实际测量,在环境温度T=25 ℃时初始零电流偏压为2.58 V,由此可得输出电压与被测电流之间的关系式为
Vout=2.58+0.06 6×Iin
(1)
此输出电压Vout经过2只精密电阻器分压后连接STM32的ADC引脚,经换算可得到被测电流的大小,即
Iin=(Vout-2.58)/0.066
(2)

图4 电流检测电路
2.5 电压检测电路
系统采用电压—频率变换法(voltage to frequency conversion,VFC)。测量电路分为2个部分:
1)V-F变换部分:由AD654完成,其内部的放大器呈现出250MΩ的输入阻抗,由于此芯片输出是一个集电极开路(open-collector,OC)门,所以外接一个上拉电阻器,理论上的非线性仅为0.06 %,输出方波频率与被测电压之间的关系式为
fout=Vin/(10×Rt×Ct)
(3)
式中fout为AD654的输出方波频率;Vin为被测电压;Rt为3脚上的总电阻值;Ct为6,7脚之间的电容值[9]。电压检测电路如图5所示。

图5 电压检测电路
2)用于电气隔离部分的光耦PC817,为了确保正常的频率响应,综合AD654和PC817的整体特性,选择AD654的fout=5 kHz时的输出频率给PC817。
通过实际测量发现存在误差,原因有两点: AD654外部的阻容均非精密的,在阻值和容值上会有一定的偏移,导致输出方波频率产生误差;为了稳定匹配PC817的频率响应特性,选择了AD654的fout=5 kHz时的方波输入给PC817,由于偏离AD654的中心频率,导致了输出方波频率产生误差。上述原因造成了斜率k产生了畸变,但由于理论频率和实际频率都随输入电压成正比,采用“斜率矫正法”解决输出频率误差问题,斜率的矫正系数adj=∑fth/∑fac≈0.742 6,其中fth为理论频率,fac为实际频率,将adj引入到C程序中对原始数据进行斜率矫正,即得到高精度的测量电压值,其核心代码如下:
u32fout=0;//被测电压转化成的频率值
void ADC_task(void *pdata) {
u16 adcx,Rt = 1;
floatCt=0.000 1,adj=0.742 6;//振荡电容值,斜率矫正系数
while(1) {
adcx=fout*(10*adj*Rt*Ct);//被测电压的mV值,adj为斜率矫正系数
canbuf_transmit[0] = (u8)(adcx/100);//赋值给CAN总线数据帧的DLC
canbuf_transmit[1] = (u8)(adcx%100);}}
3 灯车控制系统软件设计
灯车控制系统的软件设计在嵌入式实时操作系统μC/OS-II和图形用户引擎emWin的基础上编写,主要包括主控器程序、数据采集程序、电气驱动程序、无线遥控程序。
3.1 主控器软件结构
主控器软件分为3个层次:驱动层、操作系统层、应用层。其中应用层包括6个任务:图形用户界面(graphical user interface,GUI)任务建立在emWin上,通过LCD输出;按键任务实现的功能与触摸按键一一对应,即实现对系统的各种操作;无线通信任务接收塔台遥控装置发送的控制信号,若接收成功则向塔台反馈信号。摄像任务将灯车摄像头拍摄的视频数据写入先入先出(first in first out,FIFO), CPU连续读取FIFO中的数据并显示在液晶上,形成视频图像;CAN信息帧处理任务实现了对各种CAN信息帧的识别与处理;分控检测对数据采集/驱动板实时检测,实现了CAN协议中设备掉线检测的功能。
3.2 数据采集/驱动板软件结构
固态继电器功能通过按键控制固态继电器的开闭状态从而通过电气隔离的方式实现灯光控制;步进电机通过响应按键的功能,控制探照灯的升起和角度旋转;传感器数据采集通过各种传感器(MPU6050,AD654,ACS712)测量灯车的工作参数,包括探照灯的工作电压、工作电流、探照角度。将上述3种测量参数通过CAN总线上传至主控器,并实时地显示于液晶上,若参数超过允许范围则通过蜂鸣器报警。
3.3 遥控装置软件结构
无线通信任务用以响应每个按键的操作,发送不同的控制命令至不同的灯车,同时接收灯车反馈的无线信号;按键功能实时扫描每个按键的按下情况,发送不同的控制指令给不同的灯车;显示功能用于显示灯车的工作状态和故障信息。
4 实验结果与分析
4.1 电压检测电路测量结果
经过斜率矫正后的原始测量数据如表1所示。

表1 斜率矫正后的电压检测电路测量数据
由表1知:矫正后的频率值已经非常接近理论频率值,线性误差可以保持在1 %以内,符合系统设计要求。
4.2 电流检测电路测量结果
电流检测电路利用线性霍尔效应进行测量,电流检测电路的原始测量数据如表2所示,可以看出,在给定电流值的情况下,通过霍尔传感器ACS712转换的电压值,其测量值接近理论值,线性误差控制在了1 %以内,符合系统设计要求。
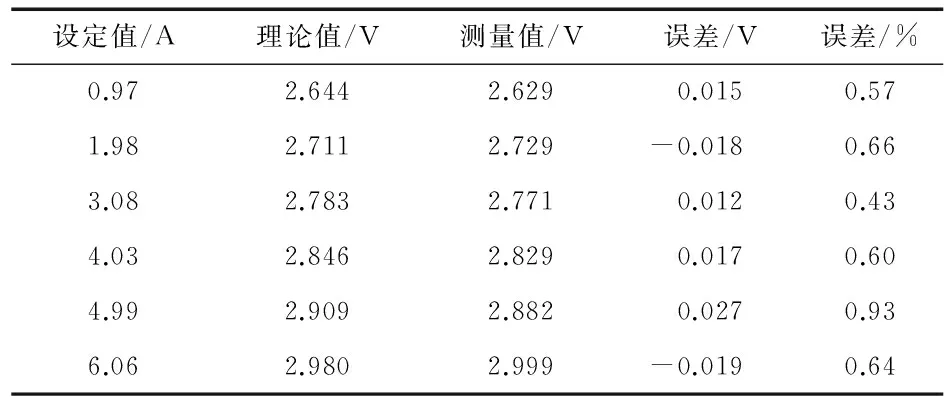
表2 电流检测电路测量数据
4.3 控制系统整体测试
对整个控制系统进行了功能和性能测试,各项功能要求和性能指标均满足设计要求,主控器的图形界面布局分为标题显示区、参数显示区、摄像显示区、触控按键区。
5 结束语
夜航探照灯车嵌入式控制系统,由于通过软件、硬件的设计和数据处理算法的优化,使得设计稳定可靠,并且功能强大,可扩展性强,还可以加入其他的功能。 通过NRF24L01可以简单的组建星状网络,塔台遥控装置可以控制星状网络里的任意一台灯车,通过数据采集板可以高精度地采集探照灯的各种工作参数,其中工作电压、工作电流和探照角度的测量精度均控制在了1 %以内,完全符合控制系统的设计要求。
[1] 王会林,杨圣云,余晓春,等.机场助航灯光故障定位计算机检测系统的研发[J].韩山师范学院学报,2007(3):23-28.
[2] 冯 利,王继祥,赵义强,等.夜航灯光车布灯系统的设计与实现[J].信息技术与信息化,2008(3):61-63.
[3] 杨 欢,熊 剑,郭 杭,等.基于Cortex-M4的多传感器组合导航系统设计[J].传感器与微系统,2017,36(2):1-4.
[4] 杜华程,许同乐,黄湘俊,等.基于CAN总线的智能传感器节点设计与应用[J].传感器与微系统,2015,34(2):82-84.
[5] 李慧敏,樊记明,杨 笑.基于STM32和OV7670的图像采集与显示系统设计[J].传感器与微系统,2016,35(9):114-117.
[6] 徐普君.基于无线传感器网络的机场助航灯光监控系统[D].合肥:合肥工业大学,2010.
[7] 王 慧.基于ACS712的直流电机电流监测系统的设计[J].自动化技术与应用,2014,33(9):103-105.
[8] 胡代洲,廖长荣.新型交直流电流表设计[J].重庆文理学院学报:自然科学版,2012,31(5):75-78.
[9] 李名兆.低成本V/F转换器AD654的使用[J].仪表技术,1994(1):31-32.
Designofcontrolsystemofnightairsearchlightvehicle
ZHU Cun-qing, LI Hong
(SchoolofInformationScienceandEngineering,NingboUniversity,Ningbo315211,China)
A night air search light vehicle control system is designed,which includes the host controller,data acquisition/driver board,remote control device.The host controller is used to control car monitor video and display working parameters,meanwhile receive wireless instructions from the remote control device to control the lamp vehicle.Data acquisition/driver board consists of two parts,one is the data acquisition board,which is used to collect working parameters of the lamp,including lamp’s angle,working current and voltage which are accomplished by means of sensor and electrical isolation measurement,the other one is electric driven board ,which is used to implement light and angle control,the control system adopts the mature and stable controller area network(CAN) bus in the automotive electronics industry for communication.The tower remote control device communicates with the main controller through the 2.4 GHz frequency band,which can form the star network to control any lamp vehicle.The test shows that the parameters of the control system are kept within 1 %,the communication is stable and reliable,the function and performance meet the requirements of system design.
light vehicle control system; controller area network(CAN) bus; sensor; electrical isolation measurement; star wireless network
10.13873/J.1000—9787(2017)12—0091—04
TP 27
A
1000—9787(2017)12—0091—04
2017—10—18
朱存清(1990-),男,硕士研究生,主要研究方向为嵌入式系统设计。李 宏(1960-),男,通讯作者,副教授,硕士生导师,主要从事嵌入式系统设计与应用相关研究工作,E—mail:lihong2@nbu.edu.cn。