基于车路耦合方法的车辆制动失效影响分析
2017-12-06李平凡宋耀鑫郝会龙
李平凡,黄 钢,宋耀鑫,郝会龙
(公安部交通管理科学研究所 道路交通安全公安部重点实验室,江苏 无锡214151)
基于车路耦合方法的车辆制动失效影响分析
李平凡,黄 钢,宋耀鑫,郝会龙
(公安部交通管理科学研究所 道路交通安全公安部重点实验室,江苏 无锡214151)
目的 车辆制动失效是交通事故的重要致因之一,为定量研究特定道路交通环境下,车辆制动不良、制动失效等因素对车辆行驶稳定性的影响。方法 基于无人机航测影像构建高精度交通道路场景三维模型,同时基于Trucksim/Simulink构建车辆及其制动系模型,可实现不同轮胎制动力的单独配置。以典型案例为载体分析了大客车在长下坡与弯坡路段,大客车部分车轮制动下降情况下的车辆运动状态,并与实际事故形态做了比对。结果 仿真结果表明,在大客车右后轮制动失效而其他轮制动良好的情况下,在长下坡弯坡组合路段,大客车制动性能明显降低,侧向加速度峰值可达1.0 g,横向载荷转移率峰值可达1.0,车辆行驶稳定性严重不良。结论 证实了该方法的正确性与可行性。
交通事故;车路耦合;TrucksimSimulink联合仿真;横向载荷转移率;侧向加速度
我国每年发生10余起重特大交通事故,在这些交通事故中,大客车事故占了较大比例[1]。交通事故调查中,调查人员重点关注事故中的人、车、路因素。车和路属于事故致因中的客观因素,实施调查具有较好的可操作性。但国内目前的重特大交通事故调查中,对于车和路的因素是分开调查的,缺乏综合有效的分析方法。因此,交通事故中的车路耦合分析具有重要的实际意义。
关于车路协同[2]与车路耦合[3]研究分析,国内外已进行了相关研究。车路协同是采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统[4]。现阶段,车路协同技术主要应用于先进的智能交通系统中,与之相关的研究多采用仿真技术手段开展。运用车路耦合仿真技术分析车辆的行驶稳定性是常见的分析方法,可应用于道路安全评价[5]、交通安全模型建立[6]、车辆主被动安全[7]等研究中。道路交通事故调查中涉及人车路等因素之间的关系错综复杂,且事故原因往往是多方面因素相互作用导致的。
目前,少有研究机构针对我国重特大道路交通事故中人车路因素进行耦合分析,一方面是缺少相关的调查资料,另一方面是重特大道路交通事故中融合人、车、路等因素的建模相对复杂,难以完成符合事故形态的仿真模型建立。因此,笔者将从重特大道路交通事故调查着手,利用Trucksim/Simulink分析工具,重点研究事故中道路三维模型建立、车辆制动失效模型建立,分析在特定的道路工况中,车辆制动失效对车辆行驶安全性的影响,以期建立科学的、可视的重特大道路交通事故仿真分析技术方法。
1 问题描述与建模
以发生于2016年贵州某地的一起重大交通事故为研究对象,事故路段设计为连续弯坡组合路段。且经过调查可知,事故中大型普通客车(以下简称大客车)在事故发生时右后轮存在制动不良情况。事故发生时,车辆的冲出道路侧翻至道路左侧边坡中。
1.1 道路线型恢复与建模
道路线型恢复使用多旋翼航空飞行器,按照预定飞行航带飞行并拍摄多幅影像,如图1所示。
基于无人机航空摄影测量理论,具有一定重叠度的多张影像构成了立体像对,结合摄影中心的GPS信息和每张影像的姿态数据,可以解算每个物方点的空间坐标。论文采用无人机数据处理软件Pix4DMapper对拍摄照片进行地形建模,得到了测区内数字表面模型(DSM),如图2所示。由于数字表面模型上每个物方点的X、Y、Z坐标已知,并且每个点的坡度和坡向参数可以计算得到,因此,本文沿数字表面模型中道路中心线连续采样,得到的一系列采样点即可恢复道路线性。

图1 部分航拍影像

图2 道路数字表面模型
通过以上方法获取道路线型数据后,即可在Trucksim车辆动力学仿真软件中建立道路的三维模型,Trucksim中建立的道路平纵曲线如图3所示。

图3 道路线型
1.2 事故车辆建模
根据事故调查资料,获取事故车辆的外观尺寸、动力性能、轮胎规格等相关信息,整车参数见表1,根据表1中的参数,在Trucksim中对事故车辆进行整车建模。

表1 整车参数
2 Trucksim/Simulink大客车制动失效建模
2.1 大客车制动力分配模型
事故大客车在事故发生时右后轮出现了严重的制动不良情况,因而大客车制动失效模型的建立即可简化为前后制动器制动力的比例分配问题。根据汽车理论相关知识可知,理想的前后制动器制动力分配关系式为[8]:

式中,Fμ1为前制动器制动力(N);Fμ2为后制动器制动力(N);φ为地面附着系数;G为汽车重力(N);a为质心到前轴的距离(m);b为质心到后轴的距离(m);hg为车辆质心高度(m)。
根据式(1)可解得大客车制动器良好情况下理想的前后制动力分配情况为:

根据式(2)在Simulink中建立理想情况下(即制动性能良好)的大客车制动力制动模型,如图4所示。图4中将计算得到的前后轴制动器制动力Fμ1、Fμ2作为 Trucksim 的输入,即可控制车辆的制动情况。

图4 大客车前后轴制动器制动力分配模型
2.2 大客车制动失效模型
事故大客车安装有防抱死装置,且事故发生时,防抱死装置正常工作,因而在建立右后轮制动失效模型时必须考虑大客车在弯道上的ABS功能。根据ABS装置的状态方程(见式(3))[8]及ABS控制原理可知,当汽车制动开始时,若车轮的角减速度低于某一阈值(-a)时,取此时的轮速作为初始值,计算车轮的滑移率s。当车轮的角减速度已达阈值-a而车轮的滑移率s小于设定的阈值s1时,轮缸压力保持不变;当s大于s1时,减小轮缸压力,此时车轮角减速度降低,恢复到-a后即保持制动压力;此后车轮会因惯性而加速,此时重复上述过程,直至车辆停止。
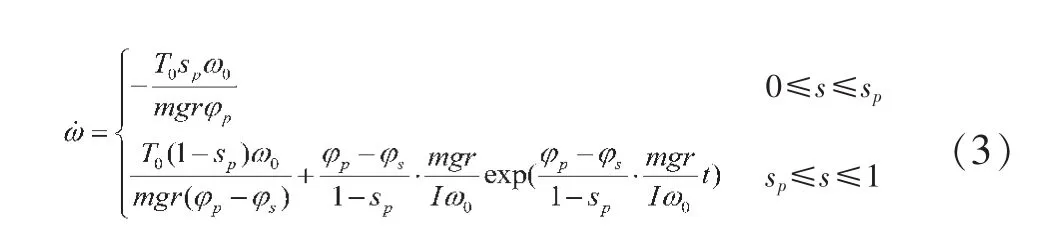
式中,ω为汽车轮转速(m/s);T0为制动器的初始制动力矩(N·m);ω0为汽车初始轮速(m/s);为车辆质量(kg);g 为重力加速度(m·s2);r为车轮半径(m);φp为峰值附着系数;sp为滑移率阈值;φs为滑动附着系数;I为车轮的转动惯量(kg·m2);t为时间(s)。
考虑事故大客车右后轮制动失效表现为右后轮的制动蹄片与制动鼓无法正常吃合,即可理解为右后轮上分配的制动力降低。在建立大客车制动失效模型时,将右后轮的轮缸压力进行适当的调整,即可模拟右后轮制动失效情况。大客车制动失效模型首先建立在如式(3)所述的ABS控制策略上,由Trucksim输入输出的变量名如表2、表3所示。建立的带ABS系统的大客车制动失效模型如图5所示。

表2 Trucksim输出

表3 Trucksim输入

图5 带ABS的制动失效模型
3 仿真结果分析
上述建模过程完成了事故路段、事故车辆及车辆动力学性能的模型建立,随后在Trucksim仿真软件中进行事故过程仿真。设定驾驶人沿道路右侧1.5 m行驶,方向盘随道路中心线进行自动调整,初始行驶速度为60 km/h,行驶2 s后,驾驶人采取制动措施,制动协调时间为0.1 s,制动压力为10 MPa,车辆为7速自动挡。分别分析在制动性能良好的情况下及右后轮制动失效情况下的车辆行驶稳定性。
事故大客车在事故发生时,同时出现侧滑和侧翻,因而需选取合适的评价指标来评价测量的稳定性。侧向加速度(ay)是判断车辆侧滑的常用指标,车辆横向载荷转移率(LTR)是判断车辆侧翻的常用指标。侧向加速度和横向载荷转移率的计算式见式(4)、(5)。

式中,ω为横摆角速度(rad/s);R为转弯半径(m)。

式中,Fzl为左侧轮胎垂向载荷(N);Fzr为右侧轮胎垂向载荷(N)。
对于大客车而言,当侧向加速度超过0.3g时可认为车辆出现侧滑[4]。横向载荷转移率的数值在[-1,1]之间,当 LTR=±1时,表明车辆的载荷完全转移到某一侧,此时汽车发生侧翻;当LTR=0时,左右两侧载荷均衡,车辆行驶稳定。实际情况下,当车辆的横向载荷转移率达到0.8时,若不进行相应调整,车辆继续在相同工况下行驶也会发生侧翻,因而本文在研究车辆的横向载荷转移率时,将0.8作为阈值,当LTR超过此数值时,认为车辆存在侧翻可能。
首先分析事故大客车在制动性能良好的情况下,在事故路段上的行驶情况,选取大客车的纵向速度、侧向加速度、滑移率及纵向加速度作为输出,输出结果如图6所示。
由图6可知,大客车在0.2 s后执行制动,车速呈线性降低,约3 s后速度将为0(图6左上图),证明事故大客车在制动性能良好时,车辆很快能停止下来;但从图6(右上、左下)可看出,连续的弯坡组合路段使车辆出现一定的侧滑情况,最大侧向加速度有超过0.3 g的情况。但随着车速降低,车辆行驶趋于稳定;车辆的滑移率在防抱死系统控制下,基本控制在最佳滑移状态。以上分析说明了车辆在制动性能良好的情况下,大客车能在3 s内制动停车,车辆行驶稳定性良好。受道路连续弯坡组合的影响,车辆会出现一定的侧滑现象。因车辆能在较短的时间内制动停止,因而车辆不会出现侧翻,不作大客车横向载荷转移的分析。
随后进行了车辆右后轮制动不良情况下的Trucksim/Simulink仿真,仿真工况与上述制动性能良好时的工况相同,仿真模型见图5,仿真结果见图7,图7中,左上、右上、左下、右下分别为大客车的纵向速度、侧向加速度、滑移率及纵向加速度输出。
由图7可知,大客车右后轮制动失效后,整车制动效果明显下降,车速由60km/h增加至80km/h,车辆未发生抱死或空转情况,但是侧向加速度在5~9s时均超过了0.4g,且峰值的侧向加速度超过1.0g,说明车辆发生严重的侧滑。
Simulink中建立式(5)所述的横向载荷转移率计算模型,继续分析在制动失效情况下大客车横向载荷情况。计算结果见如图8所示。

图6 制动良好时车辆行驶状态

图7 制动失效时车辆行驶状态
由图8可知,大客车右后轮制动失效后,在长下坡弯道组合路段,车辆的横向载荷转移率峰值多处达到1.0,说明大客车在该路段行驶时,多处存在侧翻可能,车辆行驶稳定性严重不良。
仿真结果验证了该事故是道路线形和车辆制动失效共同导致的。在长下坡连续弯坡组合路段,大客车行驶时会出现侧滑。当大客车右后轮制动失效时,整车的制动性能严重下降,在事故路段行驶时,车辆侧翻几率增大。

图8 横向载荷转移率变化情况
4 结论
研究了基于航测影像恢复道路线型的方法,并依据航测三维点云数据在Trucksim仿真软件中建立事故路段模型。利用Simulink建立了大客车带ABS的制动系统及失效的制动系统模型,并分析了事故大客车在制动系失效前后车辆的行驶稳定性,得到如下结论:
(1)事故是道路线形不合理和车辆制动系失效共同导致了,大客车行驶时,侧向加速度峰值可达1.0 g,横向载荷转移率峰值多处达到 1.0,车辆存在严重的侧翻可能性。
(2)模型针对的事故形态有限,需针对不同的事故形态,建立不同的车、路模型,且驾驶人是事故中非常重要的因素,真实的驾驶人模型需及时引入要研究中。
[1]公安部交通管理局.中华人民共和国道路交通事故统计年报[Z].2015.
[2]Li Sihui, Shangguan Wei, Cai Baigen, et al.Cooperative Vehicle-infrastructureSystem SimulationStrategyand Method[J].Journal of Central South University(Science and Technology),2015,46(10):3944-3953.
[3]Li Jie, Zhang Zhe, Zhang Ying-Chao.Effects of Crosswind on Handling and Stability of Truck Driving in a Straightline[J].Journal of Jilin University (Engineering and Technology Edition), 2009,39(2):255-259.
[4]Fei Tian, Chaozhong Wu, Duanfeng Chu, et al.Experimental Design of Integrated Platform for Demonstration of Cooperative Vehicle Infrastructure Systems in China[C]//17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, 2014:105-108.
[5]黄钢,陈亚振,侯悦,等.基于车辆稳定性的改扩建高速公路横坡方案安全性评价研究[J].交通信息与安全,2014,(4):74-79.
[6]杨志刚,张艳,姚红云,等.基于车路耦合的山区道路交通安全度模型[J].交通信息与安全,2011,(01):51-54.
[7]Fan Li, Hu Jian, Liang Hao-tong, et al.Research on Bus Anti-rollover Model in Extreme-turn Conditions and Active Control Method Based on Computer Simulation[C].Computer Science&Education (ICCSE)2016 11thInternational Conference on, 2016:512-516.
[8]余志生.汽车理论[M].第 5 版.北京:机械工业出版社,2015:108-128.
Analysis of the Influence of Vehicle Braking Failure Based on Vehicle-road Coupling Method
LI Ping-fan,HUANG Gang,SONG Yao-xin,HAO Hui-long
(Key Laboratory of Ministry of Public Security for Road Traffic Safety,Institute of Traffic Management Research,Ministry of Public Security,Wuxi 214151,China)
Objective The disabled vehicle braking system is one of important causes of traffic accidents.This study aimed at quantitatively analyzing the effects of the disabled vehicle braking system on the driving stability under certain traffic circumstances.Method The high-precision 3D model of the traffic scene was built based on aerial images.The vehicle and its braking system were built based on Trucksim/Simulink,which was capable of distributing different braking force on different wheels.A representative traffic accident was analyzed to study the vehicle’s motion on a long downhill and curve slope road,when the accident bus’s braking performance partially dropped.The simulation of the vehicle’s state was compared to that in the actual traffic accident.Result It was showed that the vehicle’s braking performance decreased significantly,when its right rear wheel was in disabled braking condition and other wheels performed well.What’s worse,the peak value of the vehicle’s lateral acceleration reached 1.0g and the peak value of lateral load transfer rate reached 1.0,which indicated the vehicle was in a serious driving instability.Conclusion The results of the simulation proved the correctness and feasibility of the proposed simulation method.
traffic accident;vehicle-road coupling;TrucksimSimulink joint simulation;LTR;lateral acceleration
TP391
A
10.3969/j.issn.1671-2072.2017.06.010
1671-2072-(2017)06-0061-07
2017-03-17
公安部科技强警课题(2016GABJC29)
李平凡(1979—),男,副研究员,主要从事道路交通事故鉴定研究。 E-mail:lpfnew@163.com。
(本文编辑:冯 浩)