不同疲劳诱导方案对落地时下肢关节力学、刚度和能量吸收的影响
2017-12-01张希妮傅维杰
张希妮,傅维杰,夏 锐,刘 宇
不同疲劳诱导方案对落地时下肢关节力学、刚度和能量吸收的影响
张希妮,傅维杰,夏 锐,刘 宇
目的:比较两种典型运动方案:恒速跑 (简称“跑疲劳方案”) 和冲刺变速跑+全力垂直纵跳(简称“跑+跳疲劳方案”) 诱导疲劳前、后,人体落地动作时下肢矢状面关节力学、刚度和能量表现的差异,探讨疲劳和各力学因素之间的相互关系。方法:比较15名受试者在恒速跑和折返跑+垂直纵跳方案前、后落地时的垂直地面反作用力、下肢运动学、关节力矩、下肢/关节刚度和关节能量等。结果:运动疲劳能够增加落地过程中重心下降的位移和各关节活动度(P<0.05),提高刚触地时的伸膝力矩(P<0.05),降低髋、膝关节的刚度从而减小下肢整体刚度(P<0.05),增加伸髋肌群能量吸收(P<0.05)的同时相应减小跖屈肌群的能量贡献(P<0.01)。结论:疲劳后,人体下肢采用与疲劳前不同的落地控制策略,且不同疲劳诱导的效果存在差异,其中,跑疲劳方案主要体现在运动学和关节能量的改变,而跑+跳疲劳方案则更多地影响了落地时的关节力矩和刚度,提示这可能与上述疲劳方案的运动模式有关。因此,在建立人体运动疲劳模型时,需要考虑不同的疲劳诱导方案对于疲劳后落地时下肢控制的生物力学差异。
落地;运动性疲劳;关节力学;刚度;能量吸收
落地动作(Landing)是体育运动中各项动作的基础,能良好地反映下肢神经-肌骨系统的控制功能[8]。诚然,人体可以通过调节下肢落地姿态、运动/动力学特征、神经肌肉反馈等方式使自身以更安全的方式着地,但在触地初期仍不能避免受到自身体重3.5~7倍的冲击力[12,13],进而增加落地动作的损伤风险,且这种风险会随着运动/负荷时间的延长、机体逐渐进入疲劳状态以及落地控制策略的下降而增加[4]。
已有研究证明,不同落地模式(Landing)会引起相关生物力学参数的改变。Granata等[22]发现,与男性相比,女性在落地时表现出更小的关节刚度,是导致非接触性ACL断裂的重要原因。同时,在力竭或接近力竭状态时膝外翻力矩的增加,表明肌-骨系统维持关节稳定性的能力下降[19,29]。在落地初期,为了减小冲击力增加缓冲,下肢主要采用吸收能量的模式,如与从0.3 m的高度落地相比,从0.6 m的高度落地时下肢的关节功率和离心收缩做功均显著增加[34]。DeVita等[17]发现,人体在“软着陆”(Soft Landing)时髋关节和膝关节吸收更多的能量,而在“硬着陆”(Stiff Landing)时踝关节吸收更多的能量,但无论“软着陆”还是“硬着陆”都需要下肢肌肉承担更多的收缩任务。而与疲劳前相比,疲劳后的肌肉最大收缩力会明显降低[30],这意味着人体将以一种更加不稳定的方式着地。
另一方面,如何有效地进行疲劳诱导是研究疲劳状态下人体落地下肢生物力学的关键。量化的疲劳水平、专业的疲劳模型和科学的落地方式是实验室选择疲劳方案的主要依据[35]。现阶段国际上较为常见的两类人体运动疲劳方案是短时间疲劳法(Short-term Fatigue Protocol)和长时间疲劳法(Long-term Fatigue Protocol)。前者包括连续纵跳[14]、短距离冲刺或折返跑[32]、约50% 1 RM的下肢蹬伸练习[21]等,后者主要采用长时间的跑台运动[27]。综上,虽然已有部分文献表明,疲劳会对下肢的落地控制产生影响,但鉴于疲劳方案的不同,目前很难对包括力矩、刚度和能量吸收在内的生物力学特征在疲劳前、后的差异性上形成统一结论,更鲜有研究将这两类疲劳方案的诱导效果进行对比,以找寻更优的人体疲劳诱导模型。
据此,本研究的研究目的为探讨运动性疲劳对人体落地时下肢矢状面关节力学、刚度和能量特征影响,同时,比较恒速跑和冲刺变速跑+全力垂直纵跳诱导疲劳前、后的差异,并从方法学角度为疲劳方案的选择提供新的思路和理论依据。
1 研究对象与方法
1.1 研究对象
选取15名上海体育学院国家二级田径专业跑、跳类男性运动员作为研究对象,基本情况如表1所示。所有受试者于实验前需确认24 h内未从事剧烈运动,且近半年内无下肢受伤史,身体状况以及运动能力良好,并均已在训练或练习中熟练掌握落地动作,理解本实验意图,清楚实验流程并签署知情同意书。
表1 受试者基本情况( ±SD)Table 1 Basic Information of the Subjects

表1 受试者基本情况( ±SD)Table 1 Basic Information of the Subjects
人数 (n)年龄 (岁)身高 (cm)体重 (kg)训练年限 (年)15 20.9 ± 0.8 175.5 ± 4.2 68.9 ± 5.5 4.2 ± 1.1
1.2 仪器
1.2.1 Vicon运动捕捉系统
英国生产的16台Vicon三维红外摄像头及运动捕捉系统(型号:T40)配套直径14 mm的红外反光球,采集下肢髋、膝、踝3关节矢状面运动学参数,采样频率为240 Hz。
1.2.2 Kistler三维测力台
瑞士生产的Kistler三维测力台2块(90 cm×60 cm×10cm)(型号:9287C),外置信号放大器。对本研究中落地阶段的地面反作用力(GRF)进行采集,采样频率为1 200 Hz。
1.2.3 Kistler Quattor Jump纵跳台
采用瑞士Kistler公司生产的Quattor Jump纵跳台(型号:9290BD)测试受试者疲劳前平均最大垂直纵跳高度,同时监测疲劳诱导过程中的纵跳高度。
1.2.4 心率表
使用日本Suunto公司生产的心率表对疲劳诱导时受试者心率进行实时监控,以保证疲劳诱导的有效性和实验安全性。
1.3 具体流程
每名受试者在跑台上以2.2 m/s的速度进行6 min慢跑并进行3 min静力性拉伸后,更换运动装备(背心、短裤、鞋和袜子)。操作人员为其贴上反光球,采集受试者疲劳前的静态模型。反光球的位置为髂前上棘、髂脊上缘、髂后上棘、大转子、膝内、膝外、大腿追踪点T型架、踝内、踝外、小腿追踪点T型架、第1跖趾关节、第5跖趾关节、足尖、足跟等共36个点(图1)。而后,受试者双脚站立于60 cm高的跳深台水平面完成落地动作测试。要求测试时受试者的脚距与肩同宽,两手叉腰,以减少摆臂对落地动作的影响。听到开始口令后,两脚脚尖缓慢由翻板边缘向测力台下滑,尽量确保无垂直初速下落,落地时自然屈膝且均采用足尖着地的落地方式,并恢复到站立位(图2)[2]。全部测试分两轮进行:先在非疲劳状态下进行第1轮落地测试,然后在完成疲劳诱导后即刻进行第2轮落地测试。每轮测试均需成功采集5次有效数据。

图2 受试者落地动作测试过程Figure 2 . Testing Process of Drop Landings from a 60 cm Platform
1.4 疲劳方案
1.4.1 恒速跑疲劳方案(简称“跑疲劳方案”)
基于Quammen等[31]的疲劳方案,要求受试者在跑台上进行4 m/s的恒速跑,直到受试者不能维持预定强度继续奔跑为止。在终止运动之后递减跑台速度至1 m/s,受试者需继续行走1 min后进行落地实验。当同时满足下列两种情况时认为受试者达到疲劳状态,可终止运动:1)受试者心率达到其当下年龄最高心率的90%;2)受试者无法继续进行运动。
1.4.2 冲刺变速跑+全力垂直纵跳疲劳方案(简称“跑+跳疲劳方案”)
基于Tsai等[33]的疲劳方案,让受试者连续进行5次垂直纵跳,每次纵跳的平均高度均要求高于受试者本人纵跳最高高度的70%(在进行疲劳诱导前测定受试者的最高垂直纵跳高度),而后进行10 m×6 m的折返跑1组(折返跑的起点和终点均放有标志物,受试者需绕过标志物,图3)。受试者需要重复上述过程,当出现下列情况时认为受试者达到疲劳状态,可终止运动,并进行落地实验:在一组连续5次垂直纵跳中,受试者竭尽全力也无法使其平均高度超过其初始最高垂直纵跳高度的70%为止。
随机决定这两种疲劳方案诱导运动员疲劳的顺序,两种疲劳方案诱导相隔1周进行,以确保疲劳已消除且两种疲劳方案不会互相影响[34]。疲劳诱导期间受试者需要佩戴心率表进行实时监控(最高心率、平均心率),并采用自感疲劳分级量表(RPE)作为辅助的疲劳程度测定。

图3 折返跑+垂直纵跳疲劳诱导方案示意图Figure 3. Shuttle Run + Maximal Vertical Jump Fatigue Protocol
1.5 实验参数
本实验研究的落地阶段为触地瞬间至膝关节屈曲到最大的阶段。采用美国C-Motion公司开发的V3D三维步态分析软件(版本:3.21.0)对采集到的数据进行滤波和逆向动力学分析,其中,运动学和GRF的截止频率分别为7 Hz和100 Hz[2]。
矢状面生物力学参数包括:垂直地面反作用力(vGRF)、关节活动度(Range Of Motion,RoM)、关节力矩、刚度、关节能量(Joint Energy)。
1.5.1 垂直地面反作用力(vGRF)
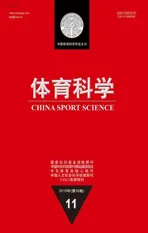
本研究中,从60 cm下落且足刚触地时(50 ms内)会产生较大的冲击力。该冲击力通常包括两个峰值,即第1峰值(vGRF1)和第2峰值(vGRF2,图4)。其中,足尖刚着地时(约10~20 ms)产生vGRF1,随后力过渡到足后区并产生vGRF2[37,38]。
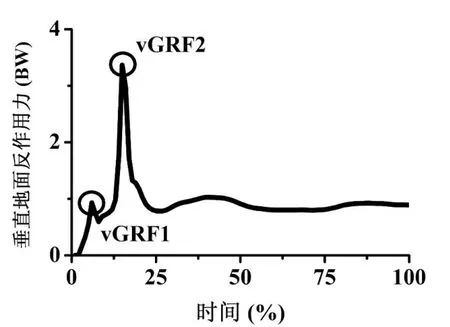
图4 从60 cm跳台下落着地过程中的地面反作用力-时间曲线Figure 4. A Typical vGRF-Time Curve During a Landing from a 60 cm Height
1.5.2 关节活动度(Range Of Motion,RoM)
选取髋(RoMH)、膝(RoMK)、踝关节(RoMA)落地阶段矢状面的关节活动范围(°),即通过计算落地阶段下肢3关节最大角度与最小角度之差而得。
1.5.3 关节力矩
根据Zhang等[21]的研究并依照落地时各关节力矩曲线形态(Curve Patterns of Joint Moment)取特征值及其出现时间(Timing)。其中,髋关节为MH1、MH2,代表伸髋力矩峰值(N·m/kg);膝关节为MK1、MK2、MK3,代表伸膝力矩峰值(N ·m/kg);踝关节为MA1、MA2,代表跖屈力矩峰值(N ·m/kg)(图5)。
图5 从60cm跳台下落触地至膝关节屈曲到最大时刻的髋关节力矩、膝关节力矩和踝关节力矩-时间曲线图Figure 5. Typical Hip,Knee,and Ankle Joint Moments-time Curves during a Landing from a 60 cm Height
1.5.4 刚度
下肢刚度(Leg Stiffness,kleg)= Fzmax/ΔL[5],其中,Fzmax代表最大垂直地面反作用力,ΔL代表下肢最大长度变化量,即髋关节中心从触地到缓冲完成时的垂直位移变化量;关节刚度(joint stiffness,kjoint)=ΔM/RoM[20],其中,ΔM缓冲过程中关节力矩的变化量,RoM为关节角度的变化量(图6)。
1.5.5 关节能量(Joint Energy)
从关节力学角度出发,关节能量指的是关节在一定时间内做功量的大小,即关节功率对时间的积分[34]。计算方法如下:

其中,Pj代表关节功率,t1、t2代表开始和结束的时间。而下肢3关节在离心期(触地到缓冲完成)所做的功为负功,定义为能量吸收(Energy Absorption,EA)。

图6 从60 cm跳台下落触地至膝关节屈曲到最大时刻的膝关节力矩-角度曲线Figure 6. A Typical Knee Joint Moment-RoM Curve during a Landing from a 60 cm Height
1.6 统计学
所得参数值均用平均值±标准差表示。本研究采用重复测量的双因素方差(Two-Way Repeated Measures ANOVA,SPSS 21.0)观察自变量(不同疲劳方案×疲劳前、后)对于各因变参数(关节力学、刚度、关节能量等)的影响。同时,采用配对样本 t 检验分别观察两种疲劳方案前、后,自变量(疲劳)对于上述因变量的影响,显著性水平α设为0.05。
2 结果
2.1 疲劳诱导效果
两种疲劳诱导方式产生疲劳所用的时间分别为:跑疲劳方案是1 126.5±344.6 s,跑+跳疲劳方案则为257.8±59.3 s,且根据单因素方差分析的结果(P<0.05)发现两者存在显著性差异。
2.2 垂直地面反作用力和关节活动度
两种疲劳方案诱导前、后,垂直地面反作用力峰值(vGRF1,vGRF2)均无显著差异。采用跑疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后髋(P<0.05)、膝(P<0.01)矢状面关节活动度显著增加;采用跑+跳疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后髋(P<0.01)、膝(P<0.05)、踝(P<0.01)矢状面关节活动度均显著增加(表2)。
2.3 关节力矩
采用跑疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后跖屈力矩峰值MA1出现时间显著减小(P<0.01);采用跑+跳疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后伸膝力矩峰值MK1显著增加(P<0.05),伸膝力矩峰值MK2出现时间显著增加(P<0.05),跖屈力矩峰值MA2出现时间显著增加(P<0.01)(表3)。

表2 两种疲劳方案诱导对落地时垂直地面反作用力峰值 (vGRF1和vGRF2) 及矢状面下肢髋(RoMH)、膝 (RoMK)、踝 (RoMA) 3关节活动度的影响Table 2 The Effect of Two Fatigue Protocols on vGRF (vGRF1 and vGRF2) and Sagittal RoM(RoMH ,RoMK and RoMA) d uring Landings

表3 两种疲劳方案诱导对落地时下肢髋 (MH) 、膝 (MK)、踝 (MA)3关节矢状面力矩峰值和出现时间特征的影响Table 3 The effect of two fatigue protocols on sagittal lower-limb peak moment (MH,MK and MA)and occurrence time during landings
2.4 刚度
采用跑+跳疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后重心下降的位移显著增加(P<0.01)、下肢刚度显著减小(P<0.01)(图7A);就关节刚度而言,与疲劳前相比,疲劳后髋关节(P<0.05)、膝关节(P<0.01)的关节刚度显著减小(图7B)。然而,跑疲劳方案对下肢刚度和关节刚度都没有产生显著性影响。

图7 两种疲劳方案诱导对落地时下肢刚度 (A) 和3关节矢状面刚度 (B) 的影响Figure 7. The Effect of Two Fatigue Protocols on Leg Stiffness (A) and Sagittal Joint Stiffness (B) During Landings
2.5 关节能量
不论是跑疲劳方案还是跑+跳疲劳方案,伸膝肌群均为能量吸收的主要肌群,其次是伸髋肌群。其中,采用跑疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后伸髋肌群能量吸收显著增加(P<0.05),跖屈肌群能量吸收显著减小(P<0.01);而采用跑+跳疲劳方案时,疲劳前、后3关节所对应肌群的能量吸收均没有显著性差异(图8)。
3 讨论
目前国内、外实验室针对疲劳的研究,主要集中于跑疲劳方案或跑+跳疲劳方案,而鲜有学者将这两种疲劳进行对比研究分析其优劣,即使有,也未更多地涉及关节刚度、能量学等更深层次的下肢生物力学表现,但这对于理解下肢疲劳可能更具参考价值。因此,本研究的目的在于比较不同运动疲劳方案诱导对人体落地时垂直地面反作用力、关节活动度、关节力矩、能量吸收和刚度表现的影响,从实验学角度出发,为实验室选择疲劳方案提供生物力学的理论依据。本研究采用两种不同方案(跑疲劳方案、跑+跳疲劳方案)诱导疲劳,从主、客观两方面判断是否疲劳,即监控心率[24]和运动表现[1,6],并通过RPE量表获得受试者主观疲劳程度[24]。疲劳的诱导效果显示,两种方案下,最大心率和运动后即刻RPE值并无显著性差异,说明本研究中所采用的两种方案运动强度相似。但在持续时间上,跑+跳疲劳方案明显短于跑疲劳方案。因此,在模拟一般实际体育运动中的疲劳以及实验方法学上相较可能更具优势。

图8 两种疲劳方案对下肢3关节矢状面能量吸收的影响Figure 8. The Effect of Two Fatigue Protocols on Joint Energy of Lower Extremity during Landings
3.1 垂直地面反作用力和关节活动度
无论是采用跑疲劳方案还是跑+跳疲劳方案诱导运动员疲劳时,都未对垂直地面反作用力峰值(vGRF1和vGRF2)产生显著影响。这与Zadpoor等[37]人对纳入落地研究进行Meta分析的结果相似,即没有发现疲劳会对地面反作用力第1峰值产生显著性影响。但与本研究结果不同的是,他们发现,在双脚落地过程中,伴随着肌肉疲劳,地面反作用力第2峰值有显著性变化。本研究认为,造成这种差异可能与受试对象、所选取的疲劳方案等有关。对于可预见性运动来说,机体可以提供一种预先设计的运动策略来给予中枢神经系统充足的时间,使其通过调控肌肉适当的活动来稳定下肢[18]。本研究所选用的落地动作是一种可预见的运动,因此,对vGRF2没有产生显著性影响,这是与前人研究产生差异的主要原因。
另一方面,与跑疲劳方案相比,采用跑+跳疲劳方案诱导运动员疲劳时,疲劳后髋、膝、踝关节矢状面活动度均显著增加,这可能与后者能更多地诱导下肢矢、额状面的运动疲劳有关。这与Kernozek等[25]的研究结果相似,即运动性疲劳会使下肢3关节的矢状面活动度明显增大。有研究认为,这是由于运动造成的神经疲劳对肌肉控制产生了影响。人体在进行持续运动时,人体中枢神经系统的兴奋性下降、神经对肌肉的控制能力下降,从而导致关节角度的改变[23,29]。但也有研究认为,这是下肢关节的一种自我保护机制,为了在产生运动性疲劳后维持或降低地面垂直反作用力。而这种保护机制虽然增大了缓冲幅度,但不利于肌肉从离心收缩过渡到向心收缩的速度,同时也增加了肌肉韧带的承载能力[9]。
3.2 关节力矩
本研究的动力学特征结果发现,采用跑+跳疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后伸膝力矩峰值MK1显著增加,伸膝力矩峰值MK2出现时间显著增加,同时,跖屈力矩峰值MA2出现时间显著增加。
人体下肢着地初期,地面反作用力在膝关节处产生屈膝力矩,在踝关节处产生背屈力矩。因此,此时人体需被动地产生伸膝力矩和跖屈力矩,用以抵抗地面反作用力产生的外力矩[7]。本研究中,MK1更多的表现为着地初期时的被动伸膝力矩峰值。结果显示,就跑+跳疲劳方案而言,疲劳后MK1显著增加,即人体的被动伸膝力矩显著增加。这表明,疲劳后,人体需要运用更多的伸膝肌群来增加伸膝力矩以对抗着地时突然产生的地面反作用力(vGRF1),维持下肢稳定[3]。随后,下肢通过主动伸髋、伸膝、跖屈,为随后的稳定支撑提供帮助[28]。本研究中,MK2、MA2出现时间显著增加,从一定程度上表明,当人体进入疲劳状态后,主动伸膝、跖屈状态的出现时间延后[18]。上述结果表明,疲劳前、后力矩峰值及其出现时间的显著性变化反映了疲劳对人体控制策略的影响,即疲劳后,为了抵抗刚触地时的巨大冲击力维持下肢稳定,膝关节被动伸膝力矩增加,使得离心期主动伸膝和跖屈力矩峰值的时间延长。
与跑+跳疲劳方案相比,跑疲劳方案并没有对关节力矩产生影响。提示,由于跑+跳疲劳方案是从矢状面和额状面等平面进行疲劳诱导,而跑疲劳方案仅从矢状面这一单一平面内进行诱导。不同维度的运动模式似乎是造成被动伸膝力矩差异性的原因,但其更深的力学机制还有待进一步研究。
3.3 刚度特征
本研究采用跑+跳疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后下肢刚度显著减小。根据刚度计算方法,下肢刚度大小与冲击力峰值和身体重心的垂直位移变化相关[10]。本研究发现,垂直地面反作用力幅值在疲劳前、后变化不明显,下肢刚度的显著减小更多地与疲劳后着地时重心位移的增加相关联。具体到各关节刚度,采用跑+跳疲劳方案诱导运动员疲劳时,与疲劳前相比,疲劳后髋、膝关节刚度显著减小。关节刚度的下降影响了整体的下肢刚度,且更多地表现为相应关节活动度的增加[11],并呈现出髋、膝关节刚度对下肢刚度降低的贡献度比踝关节大。我们认为,在较好的运动表现和较低的损伤风险之间应存在某一合理的刚度范围[36]。但由于目前对理想的刚度范围缺乏统一的结论,加上个体落地姿态的差异,因此,就本研究中下肢和关节刚度的下降究竟是机体的自我保护,还是损伤风险的增加,抑或是仍在一定合理范围内,有待进一步验证。
与跑+跳疲劳方案相比,跑疲劳方案虽然使疲劳后的重心位移显著性增加,但对整体下肢刚度并没有显著性影响,同时也未对关节刚度产生显著性影响。这可能是两种疲劳方案动作模式的差异造成的。跑+跳疲劳方案是由折返跑和垂直纵跳两种运动任务构成,受试者在进行折返跑时,侧切动作更多地诱导了内收、外展肌疲劳;受试者在进行“垂直纵跳”这一动作时,更多地诱导了屈伸肌疲劳。而上述多维度上的疲劳诱导正是跑疲劳方案的局限所在[16]。
3.4 能量吸收
本研究发现,无论哪种疲劳诱导前、后,伸膝肌群均为双腿落地时吸收能量的主要肌群,占总吸收能量的55%左右,其次是伸髋肌群。足跖屈肌群在能量吸收方面的能力最弱,仅占约17%。上述结果支持前人的研究,如,Yeow等[36]研究表明,与单腿落地相比,双腿落地时膝关节表现出更显著的能量吸收;Decker等[16]同样发现,伸膝肌群是男性和女性落地阶段吸收能量的主要肌群,且男性的次能量吸收来源为伸髋肌群,并得出造成各关节能量吸收差异的原因,可能是由于近端肌群的体积要大于远端肌群,主要表现在肌肉横断面积、肌纤维长度、肌腱长度等方面[15],这直接导致近端肌群能量吸收的能力要大于远端肌群,表现为伸髋、伸膝肌群做功大于足跖屈肌群。另外,也有研究认为,解剖和力学结构的限制使踝关节活动范围比髋、膝关节小,导致其能量吸收的能力不如髋、膝关节等大关节。McNitt-Gray[26]也证实了这一点,他发现从60~72 cm高度自然落地,伸髋、伸膝肌群能量吸收均大于足跖屈肌群,并认为能量吸收的提高得益于髋、膝关节活动度的增加,同时,能够对易受损伤的软组织(如韧带等)产生较大的缓震作用[5]。
此外,从机械能守恒的角度出发,由于受试者的下落高度一致,且尽量确保其无垂直初速下落,因此,不论选用哪种疲劳方案,疲劳前后落地时下肢吸收的总能量应无明显差别,而本研究结果则进一步提示了疲劳前后不同关节对于能量吸收贡献的差异:采用跑疲劳方案时,与疲劳前相比,伸髋肌群能量吸收显著增加(+25.1%),而足跖肌群能量吸收则相应显著减小(-19.1%)。上述结果支持DeVita等[17]的发现,即与关节活动度较小的硬着陆相比,在关节活动度较大的软着陆时伸髋、伸膝肌群能量吸收增加,足跖屈肌群能量吸收减小,并进一步表明在疲劳后,人体下肢更多地采用大关节(如本研究中的髋关节)对双腿落地时的能量进行吸收,并抵抗冲击负荷。因此,在下肢的落地过程中,神经对这些肌群的适当控制以及这些肌群本身的离心收缩能力是至关重要的。
另一方面,本研究发现,与跑疲劳方案相比,跑+跳疲劳方案并没有对能量吸收产生显著性影响。这可能是由于不同疲劳方案所诱导的肌肉不同。在跑疲劳方案中,单一的运动模式更多地诱导大关节(如髋)肌肉疲劳[5],而在跑+跳疲劳方案中,相比跑疲劳方案,需要更多维度的运动模式,在引起大关节疲劳的同时更多地诱导了膝、踝关节肌肉的疲劳[9]。
4 结论
运动性疲劳诱导后,人体下肢采用与疲劳前不同的落地控制策略,包括增加重心下降的位移和各关节活动度,提高刚触地时的伸膝力矩,降低髋/膝关节的刚度从而减小下肢整体刚度,并在一定程度上改变髋/踝关节能量吸收的贡献。此外,不同疲劳诱导方案存在一定差异,其中,跑疲劳方案主要体现在运动学和关节能量的改变,而跑+跳疲劳诱导则更多地影响了落地时的关节力矩和刚度。这提示,可能与上述疲劳方案的运动模式有关,包括跑+跳疲劳方案从矢状面和额状面甚至水平面运动进行疲劳诱导,且诱导时间显著短于跑疲劳方案,从实验方法学上更具有参考价值。因此,在建立人体运动疲劳模型时,需要考虑不同疲劳方案的差异性对疲劳后下肢控制策略的影响,这在未来研究中需要进一步的探究。
[1] 蔡斌,戴尅戎. 评估肌肉疲劳的中枢和外周起源[J]. 医用生物力学,2015,30(2):192-196.
[2] 傅维杰,刘宇,李路. 运动鞋对人体落地冲击和下肢软组织振动的影响[J]. 体育科学,2013,33(7):45-52.
[3] 金磊,刘宇,魏书涛,等. 短跑运动控制的生物力学分析[J].医用生物力学,2008,23(3):193-201.
[4] 刘宇,魏勇. 运动科学领域的下肢刚度研究[J]. 上海体育学院学报,2008,32(5):31-35.
[5] 陆阿明,王国栋,王芳. 运动性疲劳对跑运动学与下肢肌电的影响[J]. 体育科学,2012,32(6):44-49.
[6] 上官若男,苏全生,尚画雨. 运动负荷强度与运动疲劳程度量化分级研究进展[J]. 中国康复医学杂志,2013,28(2):188-192.
[7] 魏书涛,刘宇,傅维杰,等. 短跑运动控制的生物力学分析[J].体育科学,2010,30(9):37-43.
[8] 张燊,傅维杰,刘宇. 不同着地冲击模式的下肢生物力学研究[J]. 体育科学,2016,36(1):59-66.
[9] 邹晓峰,陈民盛. 运动性疲劳对跳深动作结构影响的生物力学分析[J]. 体育学刊,2009,16(7):89-92.
[10] ARAMPATZIS A,BRUGGEMANN G P,METZLER V. The effect of speed on leg stiffness and joint kinetics in human running[J].J Biomech,1999,32(12):1349-1353.
[11] BUTLER R J,CROWELL H P 3RD,DAVIS I M. Lower extremity stiffness:implications for performance and injury[J]. Clin Biomech,2003,18(6):511-517.
[12] CAVANAGH P R,LAFORTUNE M A. Ground reaction forces in distance running[J]. J Biomech,1980,13(5):397-406.
[13] CHALLIS J H,PAIN M T. Soft tissue motion in fl uences skeletal loads during impacts[J]. Exerc Sport Sci Rev,2008,36(2):71-75.
[14] CHAPPELL J D,HERMAN D C,KNIGHT B S,et al. Effect of fatigue on knee kinetics and kinematics in stop-jump tasks[J].Am J Sports Med,2005,33(7):1022-1029.
[15] CORTES N,GRESKA E,KOLLOCK R,et al. Changes in lower extremity biomechanics due to a short-term fatigue protocol[J].J Athletic Training,2013,48(3):306-313.
[16] DECKER M J,TORRY M R,WYLAND D J,et al. Gender differences in lower extremity kinematics,kinetics and energy absorption during landing[J]. Clin Biomech,2003,18(7):662-669.
[17] DEVITA P,SKELLY W A. Effect of landing stiffness on joint kinetics and energetics in the lower extremity[J]. Med Sci Sports Exerc,1992,24(1):108-115.
[18] DUFEK J S,BATES B T. Biomechanical factors associated with injury during landing in jump sports[J]. Sports Med,1991,12(5):326-337.
[19] ENOKA R M. Muscle fatigue--from motor units to clinical symptoms[J]. J Biomech,2012,45(3):427-433.
[20] FARLEY C T,HOUDIJK H H,VAN STRIEN C,et al. Mechanism of leg stiffness adjustment for hopping on surfaces of different stiffnesses[J]. J Appl Physiol,1998,85(3):1044-1055.
[21] GEHRING D,GOLLHOFER A,MELNYK M. Gender and fatigue have in fl uence on knee joint control strategies during landing[J]. Clin Biomech,2009,24(1):82-87.
[22] GRANATA K P,PADUA D A,WILSON S E. Gender differences in active musculoskeletal stiffness. Part II. Quanti fi cation of leg stiffness during functional hopping tasks[J]. J Electromyogr Kines,2002,12(2):127-135.
[23] HEWETT T E,MYER G D,FORD K R,et al. Biomechanical measures of neuromuscular control and valgus loading of the knee predict anterior cruciate ligament injury risk in female athletes:a prospective study[J]. Am J Sports Med,2005,33(4):492-501.
[24] JANSSEN P. Lactate Threshold Training[M]. Human Kinetics,2001:53.
[25] KERNOZEK T W,TORRY M R,IWASAKI M. Gender differences in lower extremity landing mechanics caused by neuromuscular fatigue[J]. Am J Sports Med,2008,36(3):554-565.
[26] MCNITT-GRAY J L. Kinetics of the lower extremities during drop landings from three heights[J]. J Biomech,1993,26(9):1037-1046.
[27] METSIOS G S,FLOURIS A D,KOUTEDAKIS Y,et al. The effect of performance feedback on cardiorespiratory fitness field tests[J].J Sci Med Sport,2006,9(3):263-266.
[28] MIZRAHI J,SUSAK Z. Analysis of parameters affecting impact force attenuation during landing in human vertical free fall[J].Eng Med,1982,11(3):141-147.
[29] MURDOCK G H,HUBLEY-KOZEY C L. Effect of a high intensity quadriceps fatigue protocol on knee joint mechanics and muscle activation during gait in young adults[J]. Eur J Appl Physiol,2012,112(2):439-449.
[30] PATREK M F,KERNOZEK T W,WILLSON J D,et al. Hip-abductor fatigue and single-leg landing mechanics in women athletes[J].J Athl Training,2011,46(1):31-42.
[31] QUAMMEN D,CORTES N,VAN LUNEN B L,et al. Two different fatigue protocols and lower extremity motion patterns during a stop-jump task[J]. J Athl Training,2012,47(1):32-41.
[32] SANNA G,O’CONNOR K M. Fatigue-related changes in stance leg mechanics during sidestep cutting maneuvers[J]. Clin Biomech,2008,23(7):946-954.
[33] TSAI L C,SIGWARD S M,POLLARD C D,et al. Effects of fatigue and recovery on knee mechanics during side-step cutting[J].Med Sci Sports Exerc,2009,41(10):1952-1957.
[34] YEOW C H,LEE P V,GOH J C. Effect of landing height on frontal plane kinematics,kinetics and energy dissipation at lower extremity joints[J]. J Biomech,2009,42(12):1967-1973.
[35] YEOW C H,LEE P V,GOH J C. Sagittal knee joint kinematics and energetics in response to different landing heights and techniques[J]. Knee,2010,17(2):127-1231.
[36] YEOW C H,LEE P V,GOH J C. An investigation of lower extremity energy dissipation strategies during single-leg and double-leg landing based on sagittal and frontal plane biomechanics[J].Hum Movement Sci,2011,30(3):624-635.
[37] ZADPOOR A A,NIKOOYAN A A. The effects of lower extremity muscle fatigue on the vertical ground reaction force:a meta-analysis[J]. P I Mech Eng H,2012,226(8):579-588.
[38] ZHANG S N,BATES B T,DUFEK J S. Contributions of lower extremity joints to energy dissipation during landings[J]. Med Sci Sports Exerc,2000,32(4):812-819.
Effects of Exercise-Induced Fatigue on Joint Mechanics,Stiffness,and Energy Absorption in Lower Extremity during Landings
ZHANG Xi-ni,FU Wei-jie,Xia Rui,LIU Yu
Objective:To investigate the effects of two exercise-induced fatigue protocols,namely,constant speed running (running) and shuttle running+maximal vertical jumping (running+jumping)fatigue protocols separately on sagittal joint mechanics,stiffness,and energy absorption of lower extremity during landing activities. Methods: Fifteen trained male athletes were required to execute fi ve successful trials of drop landings from a 60-cm platform within the above-mentioned two fatigue protocols. The variables included vGRF,range of motion,joint mechanics,stiffness,and energy absorption in the sagittal plane movement. Results: Induced fatigue can increase COG displacement and each joint range of motion during landings (P<0.05). Post-tests using running + jumping fatigue protocol showed a signi fi cant increase in the MK1 (P<0.05) and a signi fi cant decrease in the vertical stiffness (P<0.05) compared to pre-tests. The greater eccentric work was observed at hip joint (P<0.05) within the running fatigue protocol,which correspondingly decreased the eccentric work at ankle joint (P<0.01). Conclusion:The control strategies of human lower extremity in post-fatigue were different compared with pre-fatigue. Additionally,due to different fatigue protocols,the control strategies of lower limbs were different in terms of kinetics,stiffness,and energy absorption of joints during landing activities. Kinematics and joint powers were mainly re fl ected in running protocol; while altered joint moments and stiffness were shown primarily in running + jumping protocol. Thus,there is a considerable biomechanical change in motor control of lower extremity during landings due to various exercise-induced fatigue protocols applied in human movement.
landing;exercise-induced fatigue;joint mechanics;stiffness;energy absorption
G804.6
A
1000-677X(2017)11-0048-08
10. 16469/j. css. 201711006
2016-08-09;
2017-11-15
国家自然科学基金资助项目(11772201,11302131);上海市教育委员会科研创新项目(14YZ125)。
张希妮,女,在读硕士研究生,主要研究方向为运动 生 物 力 学,Tel:(021)51253239,E-mail:zhangxini1129@163.com;傅维杰,男,副教授,博士,主要研究方向为人体肌-骨系统力学和运动鞋及装备研发,Tel:(021)51253239,E-mail:fuweijie@sus.edu.cn;刘宇,男,教授,博士,主要研究方向为运动控制与协调的生物力学等,Tel:(021)50253571,E-mail:yuliu@sus.edu.cn。
上海体育学院 运动健身科技省部共建教育部重点实验室,上海 200438
Shanghai University of Sport,Shanghai 200438,China.