一种软硬件结合的运载火箭推力调节电机动态控制方法
2017-11-25孙海峰
孙海峰 呼 吁 邹 军
北京航天自动控制研究所,北京100854
一种软硬件结合的运载火箭推力调节电机动态控制方法
孙海峰 呼 吁 邹 军
北京航天自动控制研究所,北京100854
介绍了一种运载火箭推力调节电机速度控制曲线和调节角度的灵活设置方法,该方法采用了软硬件相结合的实现方式,不需要改变软硬件状态,充分发挥了高级语言软件和FPGA的优势,克服了目前步进电机速度控制实现方法的弊端,是一种更加灵活,实用性更强,实时性和精确度更高的步进电机速度和角度控制方法。
运载火箭;推力调节;步进电机;速度控制;软硬件结合
运载火箭推力调节电机是一种2项混合式步进电机。为实现步进电机的平稳控制,避免启动和停止过程的失步或过冲,需要选择适合电机运行的速度控制曲线,通过控制脉冲频率来控制电机转动的速度和加速度来实现速度控制[1]。运载火箭推力调节电机的速度控制曲线和调节角度有灵活设置需求,一是在型号研制初期,需要对不同的速度控制曲线的负载性能进行摸底试验,要求速度控制曲线能够灵活调整;另外,射前推力调节功能测试、射前推力调节电机角度初始化以及不同飞行任务中,电机调节角度都不尽相同,因此,要求推力调节控制功能能够灵活地适应不同应用环境下的不同调节角度;此外,未来的运载火箭发展对可变的速度控制曲线有潜在需求。
近几年的相关文献中,对于步进电机的速度控制方法论述较多的是查表法,其变频控制采用软件延时或者定时器中断法,文献[2-6]对查表法及其变频控制方法进行了论述。
查表法需要事先确定好步进电机的速度控制曲线,然后将阶梯频率和阶梯步长固化在ROM中,工作过程中软件按顺序读取ROM中的数据,每次取出一个阶梯频率及其对应的步长,频率控制采用软件延时或定时器中断的方法实现,从而实现步进电机的速度控制。查表法的变频控制方法原理如下:
1)软件延时
通过改变相邻2个频率控制字之间的延时时间来实现变频控制,优点是程序简单,不占用硬件资源,缺点是CPU等待时间过长,占用大量时间。
2)定时器中断
在中断服务子程序中进行脉冲输出操作,通过改变定时器的定时常数实现脉冲频率的调整。优点是占用CPU时间少,容易实现,相对软件延时更为实用,也是目前应用较多的一种变频方法。
查表法变频控制所用的这2种方法虽然都可以实现步进电机的速度控制,但存在以下问题:
1)速度控制曲线是固化的,改变控制曲线需要更改ROM 中的数据,即改变软硬件状态,因此,采用查表法的步进电机控制系统速度曲线一旦确定,一般情况下不允许随便更改;
2)固化在ROM中的速度曲线数据包括阶梯频率、阶梯步长以及不同频率脉冲之间的时间间隔等信息,在控制曲线离散化程度较高的情况下,这些信息通常占用较大的存储空间,增加了控制成本;
3)软件延时法通过改变相邻脉冲之间的延时来改变脉冲的输出频率,频率精度依赖于软件延时的精度,精确度难以保证,且软件运行时需要完全占用CPU时间, CPU利用率低。定时器中断法相对软件延时法虽然占用CPU时间少,但是其精度依然有限。
查表法存在速度曲线固定、灵活性差和变频控制精度不高的缺点,本文提出了一种软硬件结合的步进电机速度控制方法,其硬件采用了在波形合成中被广泛使用的方法:DDS(Direct Digital Frequency Synthesis,直接数字频率合成)技术,利用硬件电路波形合成实时性强和精确度高的优点,通过FPGA实现的DDS电路,解决了软件延时和定时器中断在变频控制上存在的弊端;同时,利用与高级语言编程简单、功能强大的优点,克服了查表法速度曲线固化,灵活性差的缺点,实现了在不改变软硬件状态下对速度控制曲线的灵活设置。该方法通过软硬件的合理分工,充分发挥软件和硬件的优势,优化了系统设计,解决了现有速度控制方法的不足,提供了一种更加灵活、精确度更高且实时性更强的步进电机速度控制方法。
1 DDS技术原理概述
DDS技术是二十世纪末发展起来的一种新的频率合成方法,其采用数字化技术,从相位角度出发直接合成所需波形。直接数字频率合成技术于二十世纪70年代首次提出,但由于当时的硬件技术和工艺水平有限,DDS 技术仅仅在理论上进行了一些探讨研究,而没有得到足够的重视。近年来,随着计算机软硬件技术和超大规模集成电路技术的快速发展,现场可编程门阵列、复杂可编程器件等技术得到了广泛应用,加之对DDS 理论的进一步探讨,使得DDS技术也得到了飞速发展。DDS是全数字化的频率合成技术,由相位累加器、波形存储器ROM,D/A转换器和低通滤波器4部分组成。由于直接数字频率合成技术的全数字化,使其具有其他频率合成器无法比拟的优越性。
DDS 的基本工作原理是:在参考时钟频率下,相位累加器以所设定的频率控制字FCW 为步长进行累加,然后输出累加的结果在波形查找表中找到相应的幅度量化序列并输出,通过D/A 转换得到信号的模拟分量,最后经过低通滤波器滤波之后得到所需要的波形。图1给出了DDS的基本工作原理示意图[7-8]。
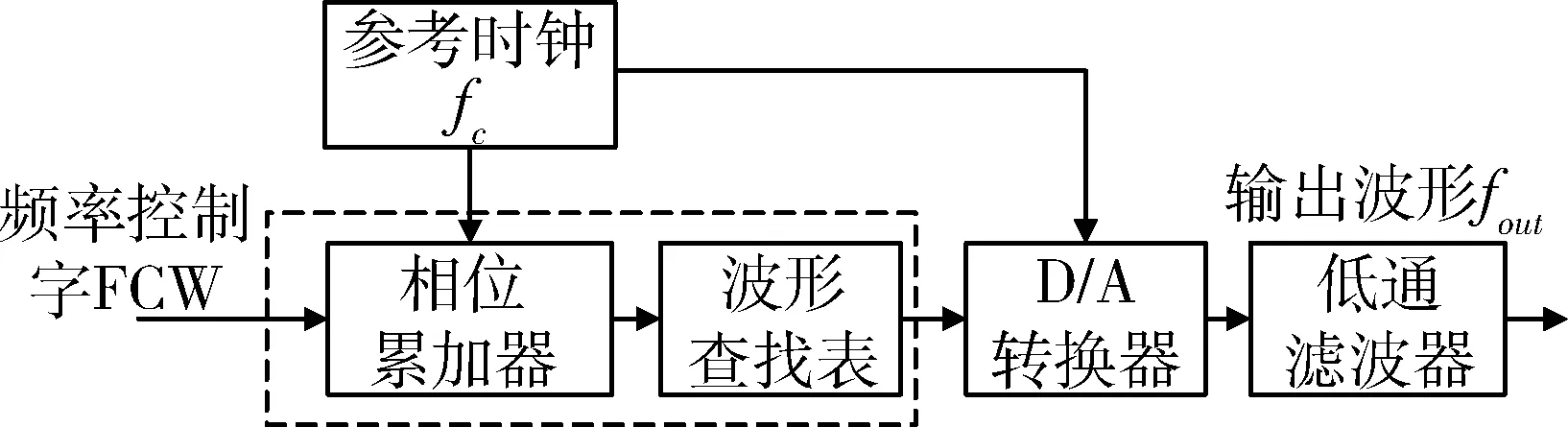
图1 DDS工作原理
图中,相位累加器的长度为N,FCW为频率控制字,则输出频率fout与参考时钟频率fc的关系为:
fout=fc×FCW/2N
(1)
相位累加器的位数N为常数,所以要改变输出频率的大小,只要通过改变频率控制字的大小就可以得到所需的频率,并且频率的分辨率也是由N的值来决定的,N的值越大,分辨率就越高;反之,N的值越小,分辨率就越低。
若已知输出频率,利用这一公式可以推导出频率控制字的转换公式:
FCW=fout×2N/fc
(2)
假设FPGA的工作频率为50 MHz,经分频后为0.25 MHz。相位累加器的长度为N位,即2N。则电机的频率转换配置公式为:

(3)
由于直接数字频率合成(DDS)技术的全数字化结构具有分辨率高、转换时间短、相位噪声低和相位变化连续等优点,使得控制脉冲生成过程具有高实时性,合成的频率脉冲精度高,符合运载火箭推力调节电机控制的要求。
工业应用中DDS电路的实现有2种方法:1)采用专用的DDS芯片;2)采用FPGA芯片实现。
与专用DDS芯片相比,FPGA实现的DDS电路具有如下特点:
1)可定义程度高,专用的DDS芯片控制方式固定,而采用FPGA实现的DDS电路则可以根据功能需求而方便的添加各种复杂的功能,实用性和便捷性更高;
2)信号质量较高,采用FPGA设计实现的DDS电路与专用DDS芯片一样可以输出高质量的信号,信号的精度误差在允许的范围之内;
3)成本低,专用的DDS芯片价格较高,而采用FPGA设计实现的DDS电路嵌入到系统中并不会使成本增加很多。
因此,基于FPGA设计的DDS电路具有更高的实用性。
2 方法原理及控制流程
2.1 方法原理
基本原理如下:
1)利用频率控制字FCW和输出频率fout之间相互转换关系,实现速度控制曲线的灵活设置。
根据式(1)和(2)可知,在已知参考时钟频率fc的前提下,可以根据频率控制字FCW得到输出频率fout;反之,也可以根据已知的输出频率fout得到频率控制字FCW。因此,利用式(2)将预输出的频率转换为FCW,再通过FPGA软件根据FCW合成频率为fout的脉冲波形,从而实现频率的动态设置。
2)利用速度控制曲线的分段规律和升速减速阶段的镜像关系简化通信协议。
步进电机常用的速度控制曲线包括直线型、指数型曲线等,在应用时通常将曲线进行离散化,形成多个频点以及相应脉冲数组成的离散化曲线,然后通过发送不同频率的驱动脉冲,实现速度控制。不管是直线型还是指数型速度曲线,都可以划分为升速段、匀速段和减速段3个部分。升速段从步进电机的启动频率开始,按照曲线频点逐渐升高频率至额定工作频率;减速段则正好相反,为升速段的镜像曲线,从步进电机的额定工作频率开始,逐渐降低频率至启动频率,最后停止;中间额定频率的工作过程为匀速段。图2是指数型和直线型速度控制曲线的3个阶段以及升减速阶段镜像关系示意图。

图2 2种速度曲线
通过对步进电机速度曲线的分析可以发现,如果仅将速度曲线升速段的频点和脉冲数上传,根据上述规律便可以实现整个曲线的绘制,从而简化通信协议,提高通信效率。
3)通过合理分工,充分发挥高级语言软件和FPGA的优势。
高级语言具有编程简单、调试方便和可读性强等优点,易实现接口通信交互功能和频率控制字的转换工作,因此采用高级语言设计的软件能非常方便地完成速度控制曲线和电机转动角度的上传、解析、分解和装订。FPGA芯片具有体积小、改动灵活方便、性能高、功耗低和效率高的优点,采用FPGA设计实现的DDS电路灵活性高、信号质量高且成本低,可以方便实现高精度、高实时的脉冲信号合成。同时,采用FPGA实现变频控制可以分担高级语言软件的工作,避免采用高级语言软件实现频率控制时的CPU独占现象,高级语言软件可以并行完成其他工作,使得CPU利用率高。将高级语言和FPGA相结合,有利于充分发挥各自优势,优化系统设计。
2.2 控制流程
在工程应用中的具体控制流程如下:
1)将待上传的速度控制曲线各个频点的频率和相应的驱动脉冲数通过设计好的软件接口协议上传至高级语言实现的软件中;
2)高级语言软件将收到的各个频率按照升减速曲线镜像对应关系完成整个曲线的扩展,再根据式(2)生成相应的频率控制字FCW,然后将各个FCW以及相对应的脉冲数一同写入FPGA指定内存中,作为DDS电路的输入,完成速度控制曲线的上传和在线装订;
3)高级语言软件启动FPGA的DDS电路,FPGA内存中的FCW依次输入至DDS电路,由DDS电路合成频率为fout、数量为预设脉冲数的控制脉冲,直至所有FCW均输入完毕,从而实现步进电机速度曲线的改变和实时驱动脉冲合成,完成步进电机的可变速度控制。
控制方法流程如图3所示。

图3 控制流程图及软硬件分工
3 应用举例及合成效果分析
3.1 应用举例
推力调节步进电机为2相8拍混合式步进电动机,电机组件工作频率参数如下: 额定工作频率为3200±200Hz;起动频率为800 Hz。
本文以某一指数型曲线为例,说明如何通过在线装订实现速度曲线的动态设定和驱动脉冲的实时合成,其他曲线的设定方法同理,不再赘述。
该指数型曲线离散化后的曲线如图4,升速段的频点和对应脉冲数见表1。

图4 离散化的指数型曲线

表1 升速段曲线频点及脉冲数
1)升速段曲线上传
首先,将升速段的16个频点和对应脉冲数(表1)以及总脉冲数通过预先设定的协议上传至高级语言软件中,由高级语言完成整个曲线的扩展、FCW的转换和FPGA指定内存的装订。
2)曲线扩展
假设本次脉冲总数为10000,高级语言软件根据表1的数据得到升速段脉冲总数为1656,根据升减速段曲线的镜像对应关系,减速段的频点和脉冲数与升速段相同,减速段脉冲总数=升速段脉冲总数=1656,因此,匀速段脉冲总数=10000-1656*2=6688,进而得到整个曲线的频点及对应脉冲数,这里不再列举。
3)FCW转换和FPGA装订
假设本例中FPGA的工作频率为50 MHz,经分频后为0.25 MHz。相位累加器的长度为15位,按照拓展后整个曲线的频点,根据式(2)计算得每个频点的频率控制字FCW,并写入指定FPGA内存空间。
以2000Hz为例,说明FCW的转换过程:

4)启动波形合成
高级软件收到启动指令后,启动FPGA软件DDS电路,DDS电路根据输入的FCW合成指定频率和数量控制脉冲,直至完成所有FCW输入,从而根据装订的曲线实现电机的速度和角度控制。
此外,对试验中的脉冲波形进行记录,对DDS脉冲合成效果进行验证,这里从试验记录波形中随意选取了800Hz,2000Hz,3200Hz三个频点的脉冲波形,分别如图5~ 7所示。

图5 800Hz脉冲波形图

图6 2000Hz脉冲波形图

图7 3200Hz脉冲波形图
3.2 合成效果分析
1)频率分辨率高。合成频率的分辨率由相位累加器的长度N决定,运载火箭推力调节DDS电路的相位累加器长度为15,满足飞行控制所需要的精度;
2)频率转换时间短。DDS的频率转换时间由FCW的传输时间和以低通滤波器为主的频率响应时间2部分组成,频率转换时间可以达到纳秒级。频率转换时间决定了脉冲合成的实时性,这一点在运载火箭推力调节脉冲合成控制上非常关键,运载火箭发动机推力调节具有高实时性,发动机推力在指定的时间内必须调节至预定目标,这就要求波形合成的实时性必须符合设计要求,否则影响飞行的成败,DDS的高实时性适合实时性要求非常高的航天应用领域;
3)相位噪声和频率漂移低。运载火箭推力调节控制器的DDS电路采用固定的晶振来产生基准频率,可以保证优异的相位噪声和漂移特性;
4)相位变化连续。DDS是一个开环系统,当一个转换频率的指令加在DDS的数据输入端时,会迅速合成所要求的频率信号,相位是连续变化的,从而保证了频率跳变过程中信号相位的连续,避免了因为相位消息的丢失造成脉冲丢失,导致步进电机调节角度不到位,致使发动机推力的调节达不到预定目标。
4 结论
本文的推力调节电机控制方法引入了软硬件结合的设计思想,通过软硬件的合理分工,优化系统设计,充分发挥软硬件各自的优势,解决了现有步进电机速度控制常用的查表法速度曲线固化、频率精度低、CPU独占以及存储空间需求高等缺点。
软硬件相结合的系统设计思想在实现系统功能的前提下,采用软件实现降低硬件设计的复杂度,通过硬件分担软件工作的负担,弥补软件控制的不足,通过二者的合理分工,优化系统设计,发挥系统最大潜能,该设计思想为未来的系统设计提供了一个新的思路。
[1] 李铁才,杜坤梅.电机控制技术[M].哈尔滨:哈尔滨工业大学出版社,2000.(Li Tiecai, Du Kunmei. The Motor Control Technology[M]. Harbin: Harbin Institute of Technology Press, 2000.)
[2] 王玉琳,王强. 步进电机的速度调节方法[J]. 电机与控制应用, 2006, 33(1): 53-56. (Wang Yulin, Wang Qiang. The Speed Control Method of Stepping Motor[J]. Electric Machines amp; Control Application,2006, 33(1): 53-56.)
[3] 袁忠. 基于单片机的步进电机控制应用[J]. 制造业自动化,2009, 31(3): 112-115. (Yuan Zhong. Application of Stepping Motor Control Based on Single Chip Microcomputer[J]. Manufacturing Automation,2009, 31(3): 112-115.)
[4] 李海波,何雪涛. 步进电机升降速的离散控制[J]. 北京化工大学学报,2003,30(1): 92-94. (Li Haibo, He Xuetao. Discrete Control of Raising and Reducing Speed of Stepping Motor[J]. Journal of Beijing University of Chemical Technology, 2003, 30(1): 92-94.)
[5] 李东君. 步进电机在全自动剪板机床中的控制研究[J]. 微电机, 2016, 49(5): 85-87. (Li Dongjun. Stepping Motor Control Research in Automatic Cutting Machine[J]. Micro Machine,2016, 49(5): 85-87.)
[6] 高军礼, 卢卓权. 步进电机一体化控制系统的设计[J]. 控制系统,2007, 23(4): 69-73.(Gao Junli, Lu Zhuquan. Designing of Step Motor Integrative Control System[J]. Control System,2007, 23(4): 69-73.)
[7] 曹雪芬. 铜电阻测试仪中控制器电路与DDS 系统的设计与实现[D]. 西安电子科技大学,2012. (Cao Xuefen. Design and Implementation of Micro-controller Circuit and DDS System in Copper Resistance Tester[D]. Xidian University, 2012.)
[8] 宋彦斌. 直接数字频率合成器的研究方法与实现[D]. 北京交通大学,2013. (Song Yanbin. Research and Implementation of Direct Digital Frequency Synthesizer(DDS)[D]. Beijing Jiaotong University, 2013.)
ADynamicControlMethodforThrustMotorsofLaunchVehicleBasedonSoftwareandHardwareCombination
Sun Haifeng, Hu Yu, Zou Jun
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Inthispaper,akindofflexiblespeedcontrolcurveandanglesetmethodforthrustregulationmotoroflaunchvehiclebasedonsoftwareandhardwarecombinationispresented,whichismoreflexible,practical,realtime,accuratethanothersteppingmotorspeedcontrolmethodsduetoitsfeaturesofnon-requiredchanginghardwareandsoftwarestatusandgivingfullplaytothestrengthsofadvancedlanguagesoftandFPGAandovercomsthedrawbacksofcurrentothercontrolmethodsofsteppingmotor.
Launchvehicle;Thrustregulation;Steppingmotor;Speedcontrol;Softwareandhardwarecombination

TP273+.5
A
1006-3242(2017)04-0052-05
2017-03-13
孙海峰(1976-),男,河北人,硕士,高级工程师,主要研究方向为航天控制系统综合设计与可靠性理论;呼吁(1982-),女,北京人,硕士,工程师,主要研究方向为航天控制系统电气产品设计;邹军(1974-),男,湖北人,硕士,高级工程师,主要研究方向为航天控制系统软件系统设计。
