一种车载高机动雷达结构总体设计*
2017-11-20房景仕张根烜王晨晨
房景仕,张根烜,王晨晨
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
一种车载高机动雷达结构总体设计*
房景仕,张根烜,王晨晨
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
文中以一种车载高机动雷达的设计指标为边界条件,基于顶层设计理念,在结构总体布局中严格控制运输包络的条件下,合理规划各分系统边界条件,分解各分系统指标尺寸,运用关键技术解决其大口径高机动的难题。 详细阐述了为满足雷达运输与工作状态的快速转化,在有限的包络尺寸下设计了具有大角度翻转、俯仰、举高、定位和锁紧于一体的多功能集成化机构。同时方案中论述了如何运用多功能调平系统,实现在无吊装设备的情况下载车和平台的快速分离,满足铁路运输要求。
高机动;顶层布局;大角度翻转机构;多功能调平
引 言
出于现代战争发展的需要, 地面雷达装备为了提高自身的生存能力,快速可靠的架设和撤收是其基本要求之一[1]。车载高机动雷达除了要满足战场需求快速机动外,还需要满足海、陆、空装载以及运输规范等要求。因此,处理好车载高机动雷达高机动与各工况条件的运输布局以及工作状态安全稳定,是结构总体设计顶层考虑的关键难点。
雷达为了获得较远的探测距离,必须增大发射功率,加大天线阵面口径,但同时也进一步影响了其机动性能。在完成整体布局设计的情况下,缩短天线阵面的架设和撤收时间是提高车载高机动雷达的快速机动的重要措施,所以天线阵面采取高可靠、自动化程度高的自动架撤系统是非常必要的。一方面可以有效减少操作人员的数量和降低作业强度;另一方面能够可靠地缩短作业时间,提高雷达设备的机动性。
本文以某雷达为例,介绍了一种集成平台调平、天线举升/折叠以及俯仰等动作的高机动车载雷达结构总体设计。
1 设计要求
阵面尺寸(波导裂缝天线): 6.5 m × 4 m(宽 × 高);
风载荷系数: 1.03;
风速: 30 m/s(降精度工作),36 m /s(生存);
天线质量(含背架): 3 t;
阵面中心离地高度:≥6.6 m;
天线车架设/撤收时间:≤10 min/2人。
符合GJB 2948—97《运载装载尺寸与重量限制》规定的铁路运输基本货物装载界限要求,铁路运输时不需要另外的吊装设备。
2 结构总体架构设计
2.1系统组成
车载高机动雷达结构单元一般由天线车单元、电子设备单元、电站单元等组成,对于大功率高热流密度雷达有时还需要增加液冷单元。为了提高雷达机动性,需对各单元进行小型化和集成化设计,尽量缩减运输单元数[2],比如把电子设备单元、电站单元或液冷单元集成到天线车上,同时要求各运输单元之间的电缆尽量少且能够自动收放。雷达结构单元系统组成如图1所示。
该雷达共有两个运输单元:电站单元和天线车单元。天线车单元是雷达的核心单元,集成了天线阵面、自动架设系统(伺服控制及调平系统、集中式发射系统、天线举高机构、天线折叠/俯仰机构)、转台、载车平台及底盘车等。
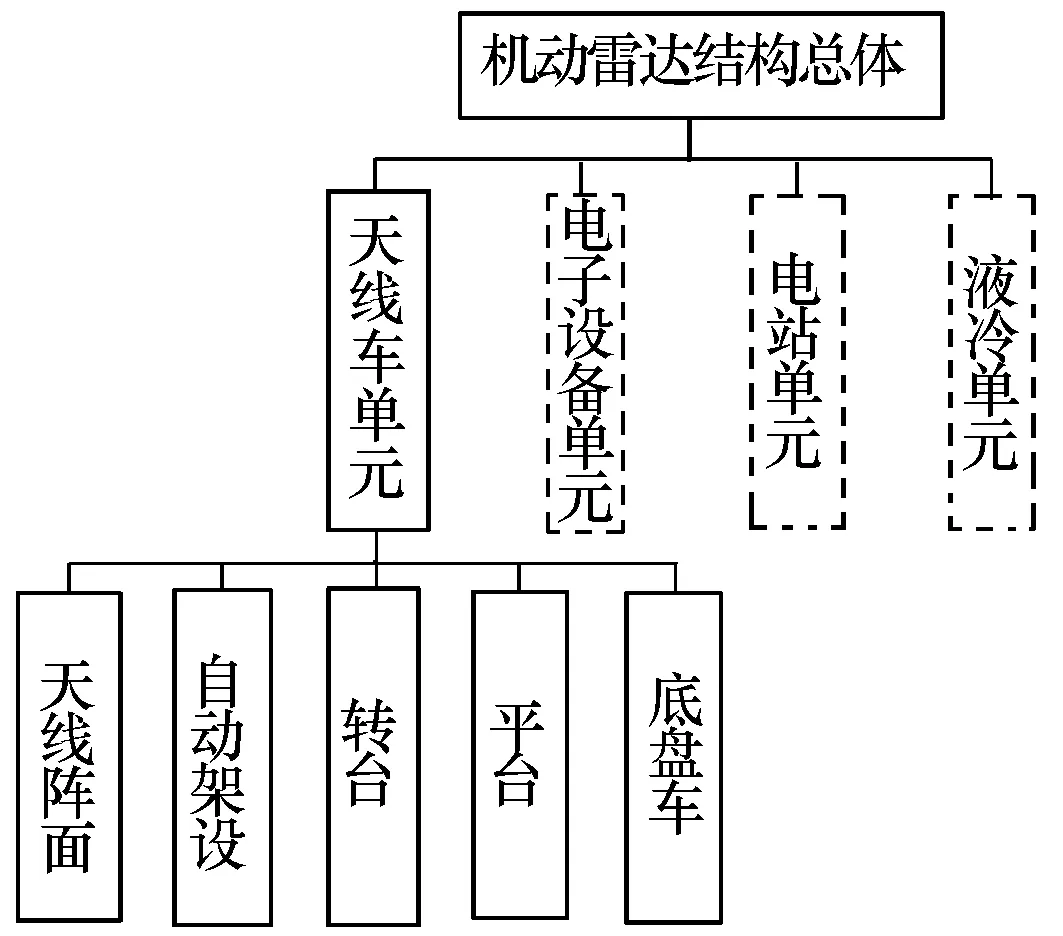
图1 车载雷达结构组成
2.2总体布局设计
布局设计不是乐高式积木形的拼接,而是采用TOP-DOWN的设计理念,从顶层布局规划边界条件(运输要求、系统组成、外形包络等)[3]。车载高机动雷达的设计流程如图2所示,首先按战技指标要求确定结构总体布局的边界限制点,根据总体设备组成从顶层完成布局设计;然后依据运输状态和工作状态的边界控制要求进行核算,经过工业造型反复沟通设计,完成各分系统的边界区间及指标输入,下达各分系统设计任务,完成天线车的整体构造。
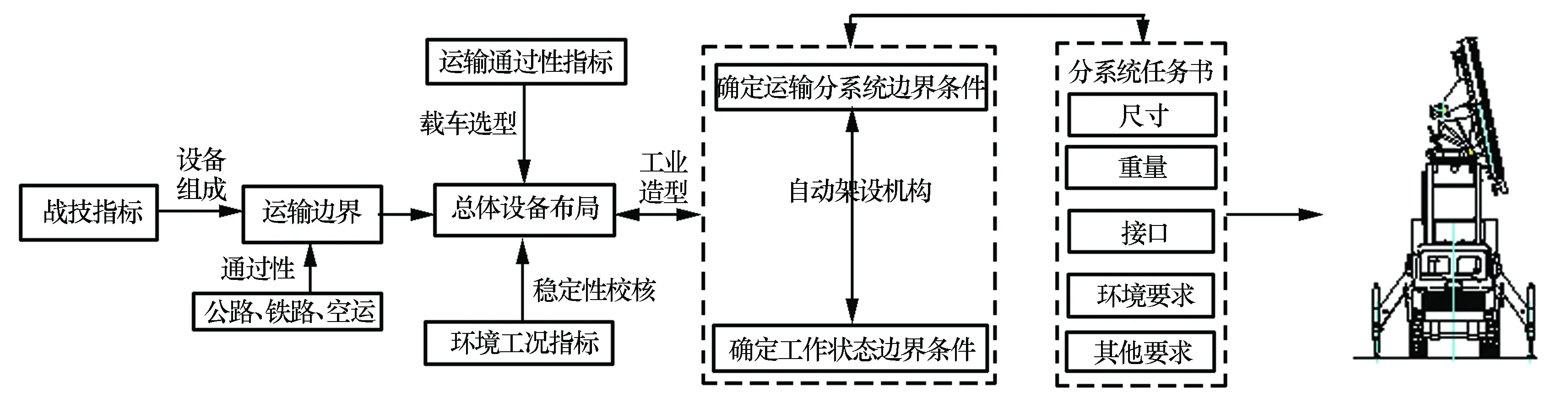
图2 设计流程
为了压缩设备单元个数,把电子设备舱集成到了天线车上,同时根据设计要求的已知信息(阵面尺寸、阵面中心离地高度等),设计了如图3所示的结构总体布局。天线阵面从高度方向均分成2块,竖直放置于平台两侧,阵面中间放置有举高机构、转台,阵面折叠/俯仰机构放置于转台上方;2 m的电子设备舱放置于平台的最后端。从图中可以看出整个结构布局具有2大特点:
1)平台上设备较多,两阵面间空间比较局促;
2)天线工作状态举升高,天线重心高,且两阵面间空间小制约了机构的设计。
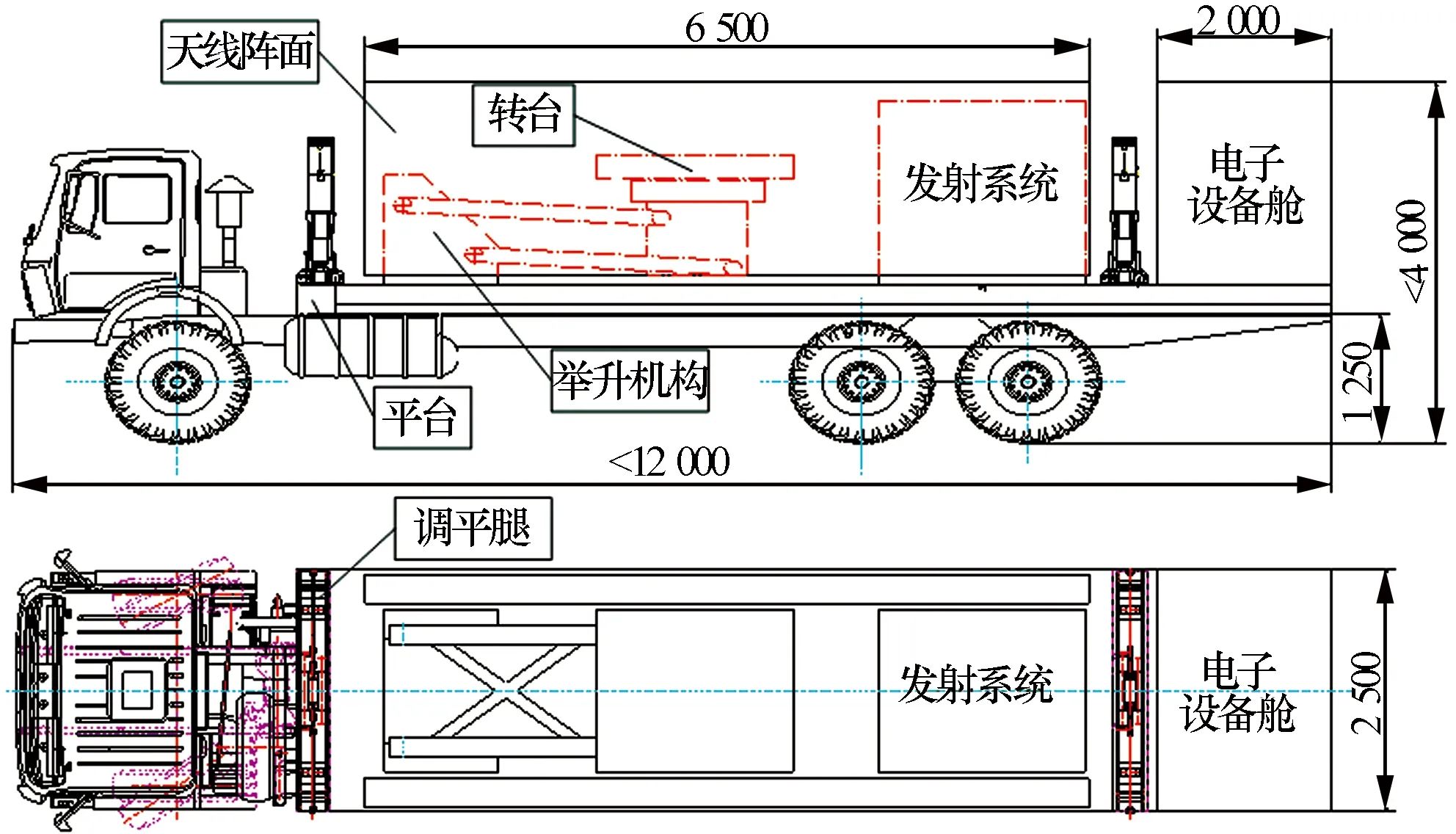
图3 结构总体布局
为了满足该雷达运输需求,采用阵面分块,折叠运输形式[4]。天线车的架设流程为载车调平、门架举升、阵面展开、阵面俯仰。每一步都配有安全锁紧装置,保证系统的安全可靠。天线车架设后的状态如图4所示。
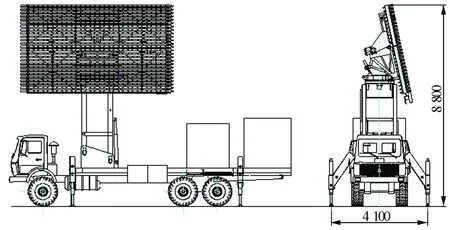
图4 天线车架设状态示意图
3 关键技术实现
举高6 m且俯仰具有多种姿态可调的大阵面(6.5 m × 4 m)高机动雷达,实现快速架撤是其关键难点。解决该关键难点应该从两方面着手,一是载荷要轻,优化驱动资源;二是机构的自动化程度要高。在负载轻质化设计方面,合理优化结构总体布局减少阵面设备量,天线骨架、转台等承力构件采用轻质材料的同时优化结构设计;在自动化程度方面,该雷达调平、举升、大角度翻转、俯仰以及锁定等动作全部实现自动化[5],可单人一键操作实现,从而解决了其大口径和高机动的瓶颈问题。架设流程如图5所示。
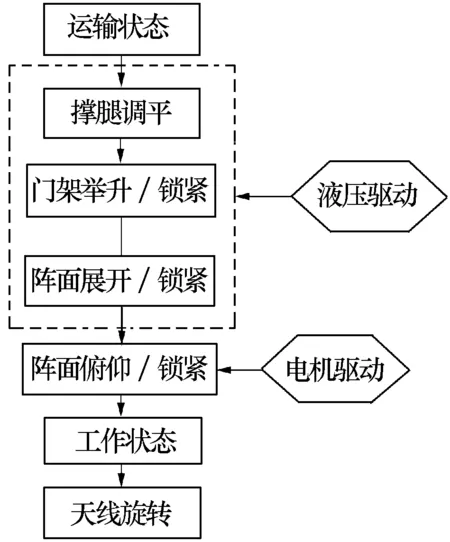
图5 架设流程图
因为举高机构采用的门架式举升即平行四连杆机构在雷达行业应用较多,在接下来的系统设计中就不作介绍,下面主要论述关键技术难点:多功能调平系统和一体化大角度折叠/俯仰机构。
3.1多功能调平系统的设计
该雷达单块天线阵面高2 m,集成到天线车上后整车运输高度约3.95 m,该高度能够满足公路运输限界要求,却满足不了火车一级超限要求。为此在总体布局方案中,利用调平系统的设计,开发了一种自装卸天线平台。当需要火车运输时,天线车开到火车平板上,松开天线平台与底盘车的快锁机构(蘑菇头式扭锁),然后利用调平系统完成天线平台的自装卸。
如图6所示,该调平系统由调平腿、斜滑腿、插销、滑轮组、油缸和天线平台等组成,油缸通过滑轮组和钢丝绳控制斜滑腿的运动,滑轮组和油缸内置于天线平台内部。其中在斜滑腿上有多个不同位置的销孔,利用这些销孔与插销的配合可实现调平腿不同跨距的要求,同时控制天线平台自装卸过程的位置要求。平时在工作状态下,只有固定的一个插销孔和插销配合,调平过程为斜滑腿滑移到底,插销锁紧,然后进行调平操作。
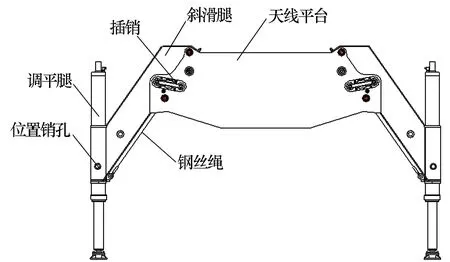
图6 调平系统组成
天线平台的火车自装卸示意图如图7所示,具体流程为:
1)松开天线平台与底盘车的连接,给天线车伺服系统上电;
2)调节斜滑腿,保证调平腿可落在火车平台上,然后插销调平,使天线平台和载车分离一定高度(40 mm左右);
3)载车驶出天线平台,在天线平台下垫垫木,收调平腿;
4)平台落在垫木上后,通过钢丝绳拉动斜滑腿上移,更换其插销孔位置;
5)调平腿继续伸出到一定高度,使平台底部脱离垫木;
6)接着再次收调平腿,最终实现天线平台落地要求。
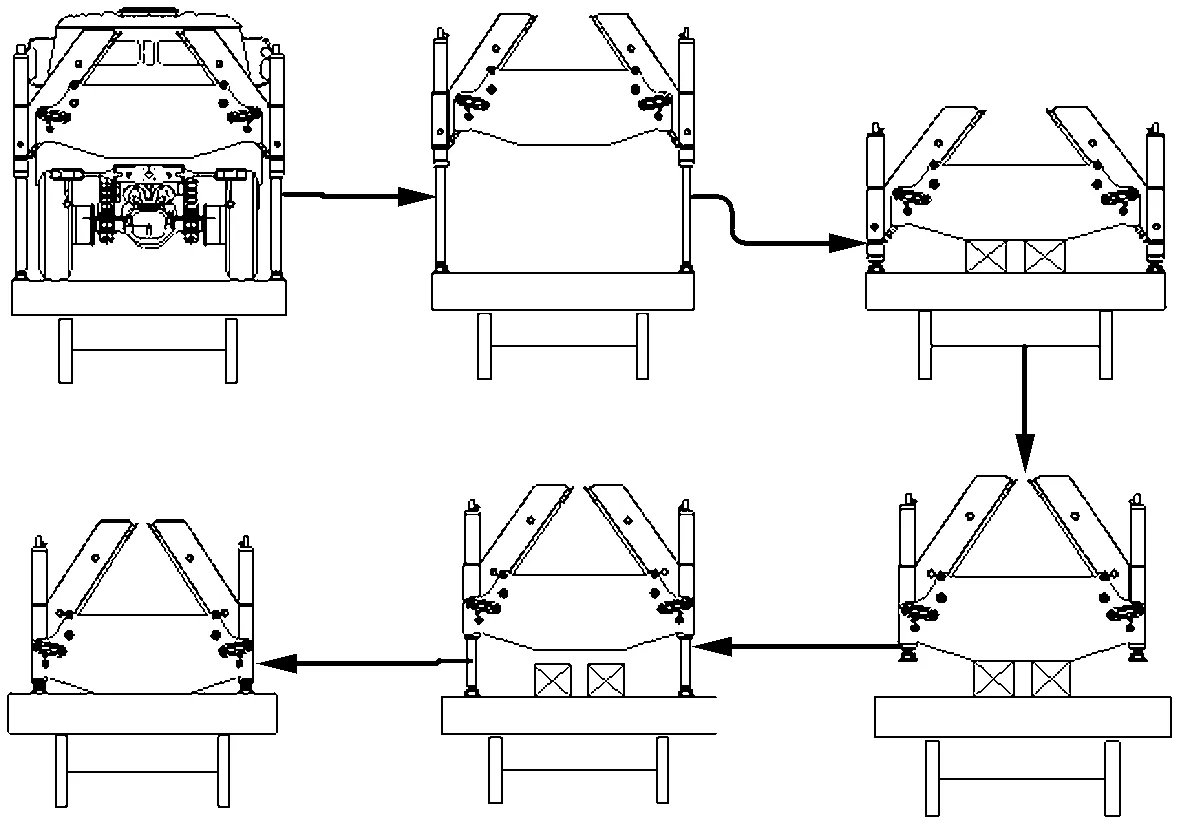
图7 天线平台火车自装卸示意图
3.2一体化大角度折叠/俯仰机构的设计
根据公路运输限界宽度不超过2.5 m的要求,设计宽度控制在2.4 m,天线厚度约0.3 m,考虑到安全距离(50 mm),实际可给天线举高、转台、折叠机构预留的宽度空间约1.7 m。在这么狭小的空间内布置这么多机构且要保证可靠性和维修性,必须采取一体化的设计方式。
为了解决这一难题,设计了一套集翻转、定位、锁紧和俯仰等功能于一体的180°折叠/俯仰机构。该机构采用液压摆缸直接驱动阵面翻转并利用电推杆实现阵面俯仰。机构主要包括锁紧机构、翻转机构、俯仰机构、感应检测装置、液压控制系统和自定位装置等[6]。
当天线需要展开时,折叠机构的撤收锁紧油缸首先把上背架和转盘之间的连接解锁,摆缸驱动上背架翻转,直至上阵面与下阵面处于同一平面,此时到位感应开关发出信号,摆缸停止驱动;然后展开锁紧油缸伸出插销锁紧上下背架;最后依靠俯仰机构实现阵面俯仰角调节,机构示意图如图8所示。俯仰机构采用电动梯形丝杠副的传动形式实现,传动副具有自锁功能,可实现任意角度位置的锁定。
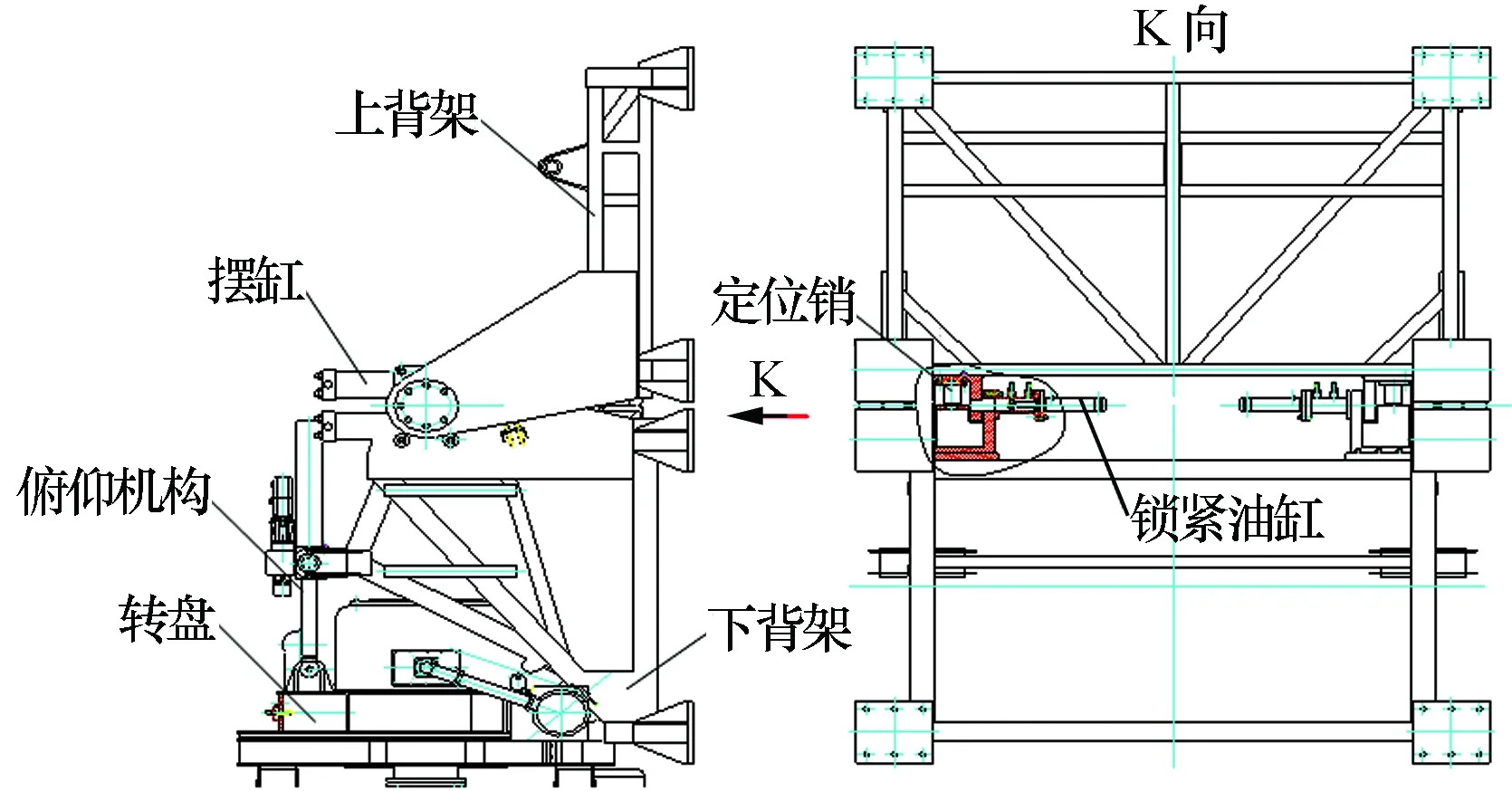
图8 机构示意图
折叠/俯仰机构在结构设计上具有3大特点:
1)上下背架的自动定位设计。折叠机构多为铰链副连接,且驱动的均为大负载的天线阵面,各传动铰链副的间隙误差积累以及翻转背架的自身刚性变形,会给天线阵面的重复精度带来很大的影响。为此,本折叠机构在设计过程中尽量少地使用铰链副,同时在上下背架间采用锥形自定位结构(定位销固定在上背架上,销孔固定在下背架上),提高了重复定位精度。
2)安全可靠性设计。各锁紧机构液压缸小,便于安装。且收缩压力是伸出压力的5倍,插销拔出的力约为插销插进力的3倍,有力地保障了锁紧系统的可靠性工作。俯仰电推杆采用梯形自锁丝杠,且电机带闸。
3)一体化设计。整个折叠机构集成了翻转机构、俯仰机构、定位机构和锁紧机构,完全可以作为通用化的折叠机构使用,只要定义好和天线阵面骨架的法兰接口,就完全可以安装各种180°折叠天线,为其他机动性雷达直接借用提供了便利条件。
3.3稳定性分析
该雷达阵面较大,举升高度较高,为了保证工作状态重心靠下,在设计过程中合理规划了天线阵面的设备量,优化了天线骨架的重量,有效提高了风载状态下天线车的稳定性要求。
雷达工作时,转动部分的质量m1= 5 t,其重心在以O点为圆心、半径R为0.4 m的圆周上。而不转动部分的质量m2= 19 t,重心在平台的中心线上。撑腿的展开面积为9.15 m × 4.1 m(长 × 宽)。
将雷达整车数学建模,并将模型中各部位按图9所示赋值。将风力加载在天线阵面上(风速为30 m/s),通过多体系统动力学软件Motion View进行动力学仿真,模拟天线转台在转动过程中风力对天线阵面交变的影响,从而影响到天线载车各个调平撑腿的支撑力大小(天线转速为3 r/min),仿真计算结果如图10所示。图中给出天线转动过程中载车4条撑腿的支撑力情况,从图中可以看出天线阵面转动过程中,受风力的影响,前腿最大压力为8.8 t,后腿最小压力为2.5 t,没有一个支腿的力小于0,未发生虚支撑的现象,说明了天线车在30 m/s的风速、3 r/min的转速下不会发生倾覆现象。

图9 重心分布

图10 4条调平腿受力曲线图
通过该软件分析,当天线不转动、风速最大时,天线架设状态系统稳定性也满足要求。
4 结束语
为了获得较高的探测精度和较远的探测距离,大口径天线雷达已成为现代高机动雷达发展的趋势。较好地处理大口径天线展开折叠、架高与运输性的关系,对提高雷达的阵地适应能力和生存能力至关重要。本文从雷达的结构顶层布局考虑,运用集成化、一体化、轻质化、自动化的设计理念[7],成功实现了小空间内多机构布局,满足某型大口径雷达状态快速转换需求,并已在实际应用中得到很好的体现。
[1] 胡长明, 罗超人. 从结构总体设计角度探讨提高地面雷达机动性的方法[J]. 电子机械工程, 1999, 81(5): 11-60.
[2] 赵新舟, 王常华.一种车载远程三坐标引导雷达结构总体设计[J]. 现代雷达, 2011, 33(11):77-80.
[3] 王恒科. 国外地面战场侦察雷达发展现状与趋势[J]. 电讯技术, 2015, 55(7): 817-821.
[4] 程辉明, 许统融. 地面高机动雷达集成化设计技术[J]. 电子机械工程, 2005, 21(3): 22-23.
[5] 杜勇. 某三坐标目标指示雷达结构总体设计[J]. 四川兵工学报, 2015, 36(7): 28-31.
[6] 房景仕, 程辉明. 大角度折叠机构的系统设计[J]. 雷达科学与技术, 2010, 8(5): 480-485.
[7] 赵德昌. 地面高机动雷达结构总体设计探讨[J]. 电子机械工程, 2007, 23(3): 19-23.
房景仕(1980-),男,高级工程师,主要从事雷达结构总体及传动系统工作。
SystemStructureDesignofaHighMobilityVehicle-borneRadar
FANGJing-shi,ZHANGGen-xuan,WANGChen-chen
(The38thResearchInstituteofCETC,Hefei230088,China)
Based on research requirement of a high mobility vehicle-borne radar system, to realize high mobility requirement under limited transport boundary situation from top-level design, the dimension and formulate boundary condition of each subsystem is analyzed. This paper describes the rapid switchover between transporta-tion and installation in detail, successfully realizes multifunction integrated structure design with large angleoverturn, elevation, lifting, positioning and locking function, and the plan describes how to rapidly separate the loading vehicle and platform without hoisting equipment by multifunction leveling system under limited envelope dimension to satisfy the requirement of railway transportation.
high mobility; top-level design; large angle overturn structure; multifunction leveling
2017-02-16
TN957.8
A
1008-5300(2017)04-0006-04
