基于ROBOPro医学机器人的创新设计
2017-11-17戈文茜蒯彦文蒯苏苏
戈文茜,蒯彦文 ,蒯苏苏 ,谢 静
(1.私立无锡光华学校,江苏 无锡 214084;2.江苏省镇江中学,江苏 镇江 212017;3.江苏大学工业中心,江苏 镇江 212013;4.镇江市第一人民医院,江苏 镇江 212002)
基于ROBOPro医学机器人的创新设计
戈文茜1,蒯彦文2,蒯苏苏3,谢 静4
(1.私立无锡光华学校,江苏 无锡 214084;2.江苏省镇江中学,江苏 镇江 212017;3.江苏大学工业中心,江苏 镇江 212013;4.镇江市第一人民医院,江苏 镇江 212002)
作者利用慧鱼创意组合模型进行医学机器人的创新设计,并用ROBOPro软件开发了带存储区程序的三轴联动医学机器人创新程序,采用二个全局变量Z变量和X变量模块,分别通过“+”指令,使机械手在最短的时间平稳地跟踪任务空间的任意指定垂直直线轨迹,并运动到规划出满足非线性运动学约束的最优圆弧曲线连续轨迹,使创新设计完成了预定的功能和动作。
慧鱼模型;机器人电子创新设计;软件ROBOPro;程序
德国慧鱼模型搭接的一种医学机器人,主要包括传动系统、执行系统和控制系统,主要功能是能够将物体堆垛和按指定曲线摆放,在具体的设计情境中用有关知识解决相应的问题时,如果实现变换的所有步骤都已知,则称为“常规问题”;如果至少有一步未知,则称为“发明问题”。解决常规问题的设计是常规设计,解决发明问题的设计是创新设计。本文对机械手在最短的时间平稳地跟踪任务空间问题,设计新的运算程序,对慧鱼三轴式医学机器人的轨迹控制进行编程和创新。
一、慧鱼三轴式医学机器人设计
用慧鱼零件及电子元器件搭接的三轴联动医学机器人是一个4自由度的机械手,如图1所示,由五个模块组成。

图1 三轴联动医学机器人
模块一:自由度1为机械手基座旋转运动的轴Ⅰ,电动机M1转动驱动齿轮箱(1)减速,带动涡轮蜗杆机构转动,涡轮转动带动基座转动,通过脉冲齿轮计数由行程开关I1和限位开关I2确定旋转的角度。
模块二:自由度2为机械手水平运动的轴Ⅱ,电动机M2转动驱动齿轮箱(2)减速,并带动水平安装的丝杆螺母机构运动,实现手臂前进或后退100mm。
模块三:自由度3为机械手垂直运动的轴Ⅲ,电动机M3转动驱动定轴轮系(3)带动垂直安装的丝杆螺母机构运动,实现手臂160mm的升降。
模块四:自由度4为机械手手爪,电动机M4转动驱动齿轮箱4减速后带动输出轴,由于手爪上丝杆轴与齿轮箱(4)的输出轴不在一条轴线上,所以通过万向节连接,行程开关I7控制丝杆轴带动螺旋机构的螺杆转动,丝杆轴通过联轴节与装配螺块的螺杆连接,形成中空的丝杆螺块结构,如图2所示。能够调节丝杆的长度,从而满足不同行程的螺块的前后移动,带动手爪摆杆摆动使手指(摇杆)张开和闭合。
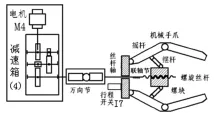
图2 机械手爪传动装置结构图
模块五:控制软件ROBOPro,ROBO控制器接到计算机后通过软件来实现对慧鱼机器人的控制,编写ROBOPro图形化程序,调用相关函数实现对机器人的控制。
二、模式识别
在给定机器人的任务下,用计算机实现模式识别,所识别的过程是机器人运动状态的抽象对象,这种对象与数字形式的信息的区别就是模式信息。
四自由度机械手四个模块的机械结构分别由四个电机驱动,每个电机由2个电子开关控制,其中一个是限位,另一个是行程,在程序的ROBOPro开始模块后通过按行程开关按钮来启动电机M1,一旦基座转动,电机M1靠限位开关自动关闭,三轴联动模式识别是由限位开关来实现的。插入一个判断模块,查询输入行程开关I1的状态,对输入I1进行设置,电机M1顺时针转动。插入另一个判断模块,用来查询限位开关I2的状态。对输入I2进行设置。一旦基座转动到指定位置,并且压住了限位开关,电机M1停止;同时插入一个判断模块是查询输入行程开关I3的状态,对输入I3进行设置,电机M2顺时针转动;插入另一个判断模块,用来查询限位开关I4的状态。对输入I4进行设置,一旦手臂运动到指定位置,并且压住了限位开关I4,电机M2停止......;各电机启动、关闭逻辑关系如表1所示。
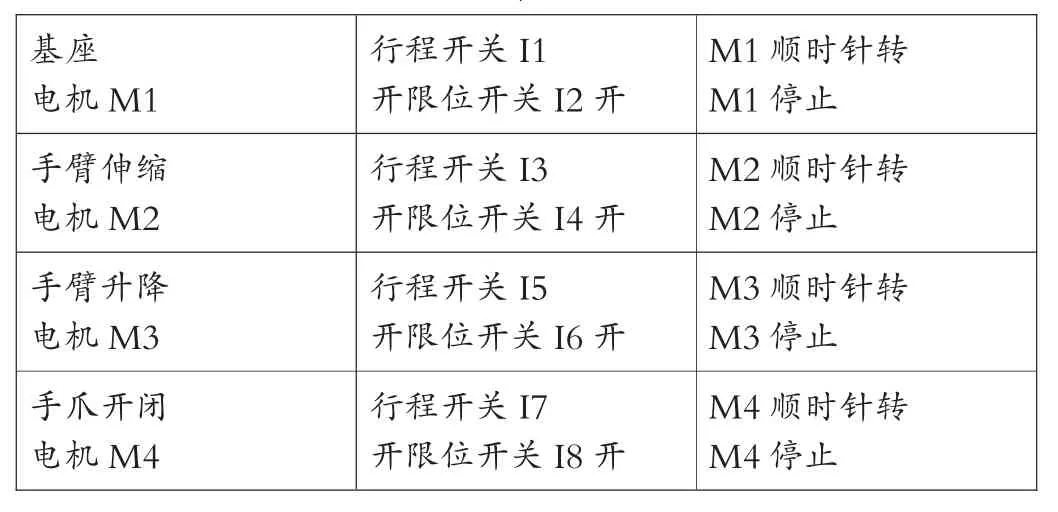
表1 电机启动、关闭逻辑关系
由计算机编程通过ROBO控制器的控制,实现三轴+1爪联动,其硬件控制电路见图3,USB数据线连接ROBO控制器与计算机串口,充电器连接ROBO控制器,操作ROBO控制器红按钮使指示灯在USB处点亮。
1.数字信号输入
图3中ROBO控制器的I1~I8接口用于连接电子开关,当电子开关处于闭合状态时,控制器检测到数字信号“1”并反馈给计算机,否则检测到数字信号“0”。机械手使用的 1~8 个电子开关(限位~行程开关)I1、I2、I3、I4、I5、I6、I7、I8 连接数字输入口。
2.马达输出
控制器输出端口M1~M4接口连接电机,硬件接线时电机M1、电机M2、电机M3、电机M4分别连接ROBO控制器的 M1、M2、M3、M4 输出端口。
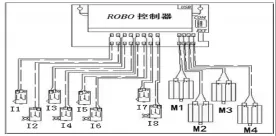
图3 机器人控制电路
3.扩展板“1+1”模式
如果将图3中控制手爪运动的电机M4连接到I/O扩展板,ROBO控制器需通过一根十针的带状电缆将I/O扩展板和主板相连,图4表示了I/O扩展板与ROBO控制器耦合的在线控制电机测试过程。
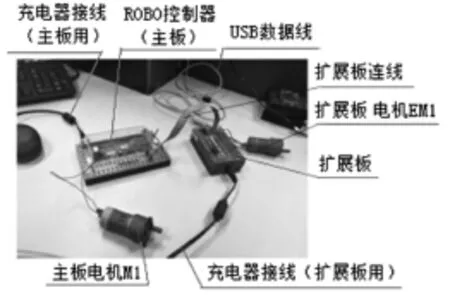
图4 计算机在线控制电机测试连线
(1)硬件接线:设有两个电机分别连接ROBO控制器 (主板)的M1输出端口和I/O扩展板的M1输出端口,USB数据线连接ROBO控制器与计算机串口,两个充电器分别连接ROBO控制器和I/O扩展板。
(2)在编程窗口中组建成控制程序流程图。用鼠标拖拽编程模块中的 并选中后右击键,出现马达输出对话框,选点[M1、马达、IF1、8、顺时针转],主板电机 M1 设置完成;若选点[M1、马达、EM1、8、逆时针转],出现 图形,扩展板电机EM1设置完成,如图5所示。
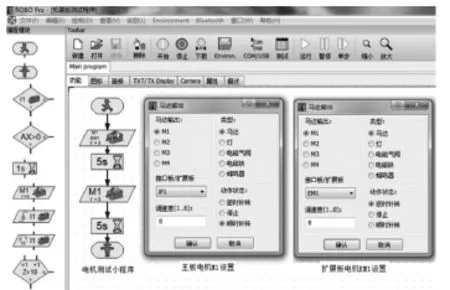
图5 IF1、EM1电机运行对话框
机器人使用的每个程序中,ROBO控制器的接口收集从数字量收到的数值,然后送到计算机,计算机把数值量的输出数值反馈传送到接口上,ROBO控制器上的微处理器接收来自计算机下载的程序,由程序自动打开或关闭相连的电机。
三、机器人程序创新设计
根据控制任务,采用模块化设计方法,将机器人的运动分为两部分:①从参考点A抓取的物体分别摆放到中转站B点空间垂直堆垛;②从中转站B点在最短的时间机械手平稳地跟踪任务空间的任意指定垂直直线轨迹,从中抓取的物体分别按非线性运动学圆弧形曲线摆放到目标区C点。
图6的示教主程序可实现参考点A的三个物体抓取至中转站B点在空间垂直摆放。
三轴联动医学机器人的空间垂直直线轨迹控制编程运算方法如下:
开始,手爪清0,三轴清0;
定时器延时等待2秒;
三轴坐标赋值,机械臂到达A点位置;
手爪夹紧物体,机械臂沿Z轴升高;
三轴坐标更新赋值,机械臂到达B点位置;
手爪松开物体;
手爪闭合,机械臂沿Z轴升高;
三轴坐标赋值,机械臂到达A点位置;
循环至手爪清0,下一个物体的抓取。
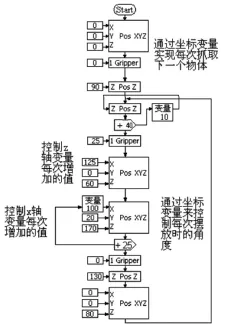
图6 三轴联动医学机器人示教主程序
为实现对中转站B点垂直摆放的三个物体做出抓取,并进行按圆弧形曲线摆放到目标区C点的功能,通过对机器人关节协调及其它信息交换进行轨迹规划,编写创新程序如图7所示。
机械手在最短的时间平稳地跟踪任务空间问题,开发带存储区程序的编写,需通过Z轴变量设置并接受“+”指令,实现空间 B(x,y,z)点和回 B’(x,y,z’)点的变换,同时通过X轴变量设置接受“+”指令,控制圆弧曲率,可使物体摆放到目标区C点满足非线性运动学圆弧曲线连续轨迹的功能。
三轴联动医学机器人的由空间垂直直线轨迹运动至平面圆弧曲线轨迹的控制编程运算方法如下:
开始,三轴清0,手爪清0,机械臂沿Z轴升高至B点;
输入Z轴坐标变量初始值10,Z变量保持这个值,直到通过+40指令,控制得到Z轴一个新的增加值,回B’点,实现每次抓取下一个物体。
手爪夹紧物体,三轴坐标赋值,机械手臂到目标区C点位置;
输入X轴坐标变量初始值100,X变量保持这个值,直到通过+25指令,得到一个新的X轴坐标增加值,可控制每次摆放物体的角度;
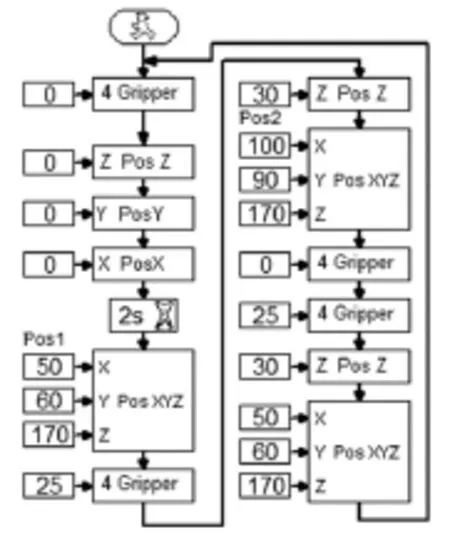
图7 开发带存储区全局变量的创新程序
手爪松开物体,按圆弧轨迹摆放;
机械手臂沿Z轴升高,三轴更新赋值,机械手臂到达B点新位置;
循环至Z轴变量,进行下一个物体的抓取。
通过对慧鱼三轴式医学机器人进行创新设计,二次开发了带存储区全局变量的创新程序,使其控制系统的编程从ROBOPro图形化第一级编程升级到采用ROBOPro图形化第三级编程,采用两个全局变量Z变量和X变量模块,分别通过“+”指令,指令传送的值就由当前值增加,使机械手在最短的时间平稳地跟踪任务空间的任意指定垂直直线轨迹,并运动到规划出满足非线性运动学约束的最优圆弧曲线连续轨迹。
[1]蒯苏苏,陈寒松,孙明权等.慧鱼智能化立体旋转停车库的创新设计[J].机电工程技术,2013(8).
[2]邢美净,辛颖.慧鱼模型在森林工程专业机器人技术教学中的应用[J].安徽农业科学,2016(16).
[3]朱世强,刘松国,王宣银,王会方.机械手时间最优脉动连续轨迹规划算法[J].机械工程学报,2010(3).
[4]蒯苏苏,陈寒松,张文涛,徐路,戈文茜.一种自动取料平台及其运料方法:ZL201510349755.7[P].国家发明专利,2015.
[5]白松,魏晓冬.油管清洗机夹持式机械手结构设计[J].机械设计与制造工程,2017(2).
[6]蒯苏苏,谭晓聪,蔡世震,甘博文,毛世民,谢静.三自由度机械手:ZL201410092252.1[P].国家发明专利,2014.
TP242.2
A
1673-8454(2017)22-0094-03
(编辑:鲁利瑞)