基于PLC的可调按摩椅控制系统设计
2017-11-17翟海祥肖光润吴何畏
翟海祥,肖光润,吴何畏
(湖北文理学院机械与汽车工程学院,湖北 襄阳441053)
基于PLC的可调按摩椅控制系统设计
翟海祥,肖光润,吴何畏
(湖北文理学院机械与汽车工程学院,湖北 襄阳441053)
为了缓解长时间工作后身体的不适,本文采用西门子PLC设计出一套按摩椅控制系统,用于按摩椅控制系统中,旨在控制按摩椅平稳、高效工作,从而满足消费者对于可调按摩椅的使用需求。为了实现以上功能,设计系统将采用西门子PLC/S7-200作为主控单元,对步进电机驱动器进行控制,进而控制步进电机的工作状态。同时由高速脉冲输出个数,对步进电机的转速进行控制,通过传感器响应控制步进电机往返运动,从而带动丝杆上的按摩小球同步往返运动。按摩小球是按摩椅的重要部位,由于前面对步进电机的平稳、高效控制,最终可使按摩椅按照使用者的需求正常工作,达到缓解使用者身体不适的目的。
按摩椅;西门子PLC;步进电机;高速脉冲
可调按摩椅功能最为全面、按摩效果最受认可的按摩器械之一,尽管国内已经出现了各式各类的电动按摩产品,也有很多的相关的企业,但是我国的按摩椅行业起步比较晚,按摩椅的普及程度不高,具有较大的市场潜力[1]。针对市面上出现的问题,根据人体工程和传统的按摩理论,研究开发一种机构简单,功能齐全,具有价格竞争优势的可调按摩椅。该按摩椅采用灵活的编程方法,通过简易的操作按钮,实现按摩椅复杂运动的控制,增加按摩椅的可调性能;采用的比较轻质的材料,使得按摩椅整体的重量轻,便于搬运;采用简单的运动机构,可使运动机构简单易行,节约按摩椅的成本,它对人们的身心健康具有积极的意义。
1 系统总体框架
系统整体设计框架见图1,按摩椅整体系统分为3个部分,(1)座椅曲面设计,根据人体对于座椅舒适度的感觉,将按摩椅靠背设计出长曲面型,同时座椅转角处设计成内凹形,有利于使用者整体更好坐在椅上;同时在座椅的右边,有一个可调节架构,可有效调节靠背的倾斜角度。(2)运动部分,运动部分是采用42步进电机KH42HM2B115微型马达电机拖动丝杆,在丝杆的滑块上装有按摩小球,随着电动机的转动,按摩小球会相应的运动,按摩小球凸出部位可有效的与人体接触,起到按摩效果。在按摩椅的左右两边上,装有若干操作按钮,可对步进电机的运动状态进行调节,例如运动的速度、工作时间,从而满足不同使用者的要求。(3)控制部分,采用PLC/S7-200作为主控,通过编程控制细分步进电机TB6600驱动器,进而控制步进电机的运动状态,通过输出脉冲个数,控制步进电机的运动速度,通过控制延时继电器控制按摩椅工作时间,通过控制电平的高低,进而控制电机的正反转,从而实现电机的往返。
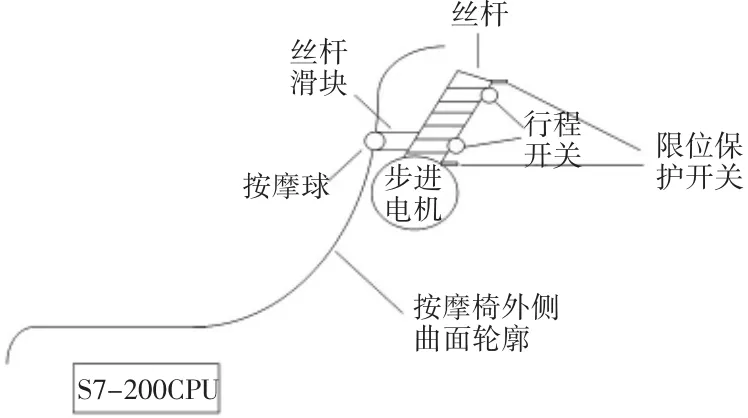
图1 按摩椅侧面轮廓
1.1 机械硬件
1.1.1 运动机构
根据按摩小球运动的状态需求,本文选取滑动丝杆作为动力装置,可有效实现左右往返运动,从而带动滑块上按摩小球往返运动。
1.1.2 座椅调节装置
由于使用者对于靠背的倾斜度要求不同,因此,本文采用可调节装置,类似飞机上的座椅,可以通过调节柄,控制靠背的倾斜度,从而满足不同使用者的需求[2]。
1.2 PLC硬件
1.2.1 驱动器简介
步进电机是一种将数字脉冲信号转化角位移的执行机构。即,当步进驱动器接收到一个脉冲信号,驱动步进电机按设定的方向转动一个固定的角度(即步进角、步距角)。通过对于程序设定,可以实现对步进电机精确控制。精确度的高低取决于单位时间内脉冲的个数,个数越多控制就越细,精度也就越高。
细分步进电机TB6600驱动器[3],实物模型可以分为以下三部分。
1.2.2 电源电压连线
VCC:电源正端“+” GND:电源负端“-”
1.2.3 信号输入端
PUL+:脉冲信号输入端 PUL-:脉冲信号输入负
DIR-:电机正、反控制负 EN+:电机脱机控制正
EN-:电机脱机控制负
1.2.4 电机绕组
A+:连接电机绕组A+相 A-:连接电机绕组A-相
DIR+:电机正、反转控制正 B-:连接电机绕组B-相
B:连接电机绕组B-相
1.3 驱动器的使用说明
1.3.1 驱动器功能
步进电机作为一种控制精密位移及大范围调速专用的电机,它的旋转是以自身固有的步距角一步一步运行的,其特点是每旋转一步,步距角始终不变,能够保持精密准确的位置。所以无论旋转多少次,始终没有积累误差。由于控制方法简单,成本低廉,广泛应用于各种开环控制。步进电机的运行需要有脉冲分配的功率型装置进行驱动,这就是步进电机驱动器。它接收控制系统发出的脉冲信号,按照步进电机的结构特点,顺序分配脉冲,实现控制角位移、旋转速度、旋转方向、制动加载状态、自由状态。控制系统每发一个脉冲信号,通过驱动器就能够驱动步进电机旋转一个步距角。步进电机的转速与脉冲信号的频率成正比。因此,对于按摩椅往返控制需要通过对驱动器进行控制,从而实现对步进电机精确控制。
1.3.2 共阳极接法:
分别将PUL+,PUL-接到控制系统的电源上,如果此电源是+5 V,则可直接接入,如果此电源大于+5 V,则必须外部另加限流电阻R接入,方向信号通过DIR-接入,使能通过EN-接入。
1.3.3 共阴极接发:
分别将PUL-,DIR-,EN连接到控制系统的地端;脉冲输入信号通过PUL+接入,方向信号通过DIR+接入,使能信号通过EN+接入。若需限流电阻R的接法取值与共阴极接法相同。
两种接法原理上是一样的,实现的过程也类似,只不过对于输出端点电平信号高低有所区别,控制动作有所不同,但是可以通过转变程序里触点的动断,来控制步进电机驱动器的外接设备,基本参数引脚图见图2.
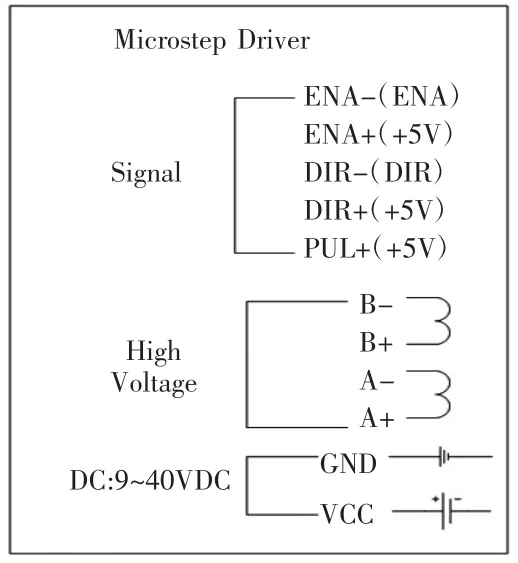
图2 驱动器的引脚分配
2 系统控制及动力部分接线图
本文采用共阴极接法,将图2、图3对应端子接起来,根据实际情况,将驱动器和步进电机以及PLC对应端接在一起,将电源端接入外接电源,由于本文选用的PLC/S7-200/CPU224DC[4],因此电源接入端为外接直流24 V,直流24 V可由外接24 V电源提供。由驱动器根据使用说明可知,电源端也为24 V直流。整体控制接线见图4、5.

图3 系统接线图
图4 实物接线图

图5 接线调试
3 系统软件部分
如图6所示,当接通程序时,在第一个扫描周期内高速脉冲会复位[5]一次,即对输出脉冲初始化一次,实现过程是由西门子编程中的传送指令完成。如图7所示,是高速脉冲输出以及电机移动方向的控制,通过传感器和限位开关进行控制,可以通过左右端的限位开关实现保护功能。
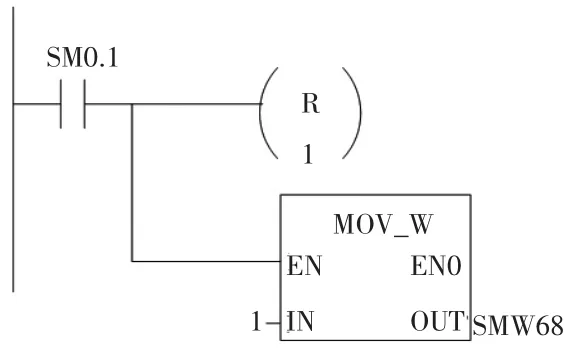
图6 输出脉冲初始化
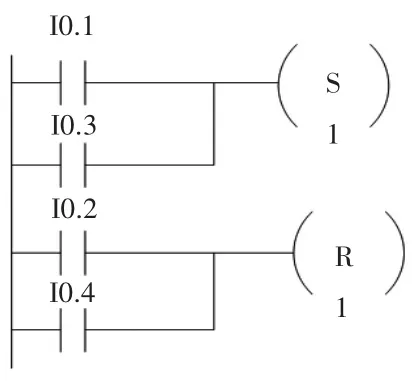
图7 左右往返控制
4 系统执行说明
4.1 系统程序执行说明
在本文中,由于M0.0串联在每条程序中,且是常开状态,当按下输入按钮SB0,接通中间继电器M0.0,并且自锁,即可启动程序执行往返运动,当按下手动急停按钮SB5时,会断开继电器M0.0所在线路,从而使整个过程停止。在滑台两端分别装有限位开关,靠近步进电机端接I0.1,另一端接I0.3;同时在靠近电机端接入行程开关I0.2,另一端接行程开关I0.4,对应的手动按钮如上图3、图4、图5接线所示。程序开始执行时,假设此时丝杆上的金属块正处在靠近电机端,这时由于行程开关接收到金属信号,触发I0.1,同时输出端QO.1接通,电机运动方向改变,朝着另一端运动,同样当行程开关I0.3检测到金属块时,也会触发输入端动作,此时,输出端Q0.1由高电平变为低电平,从而使电机方向向靠近电机一端运动,就这样形成一个循环,在无意外情况或者是认为干涉的情况下,电机会一直这样循环下去,持续工作。同时也可通过修改程序,对电机输入脉冲个数[6]进行修改,从而对电机运动的快慢进行修改,由于步进电机不适合太高的脉冲个数,因此,在修改脉冲个数时要以电机的实际参数作为依据,以免损坏电机。如果电机运动速度过快,在靠近行程开关时未能及时响应,此时左右两端的限位开关会接入线路中,进行及时换向控制,确保设备和人身安全。
4.2 控制部分接线和调试
根据上述说明和器件实际接线,步进电机正常工作,按摩小球可以随着丝杆滑块正常运行。不仅可以实现往返控制,而且还可以通过修改程序对输出脉冲进行控制,从而控制运动速度。根据系统执行流程说明,操作实验设备,发现工作状况与设计思想一致,可以实现往返调速控制,同时可以人为随时中止设备,实现实验设备可控,具体接线见图4、图5.
5 总结
对比国内外对按摩椅的研究历史与现状,以及按摩椅中存在的不足,对本文设计的可调按摩椅提出具体的设计要求。采用西门子PLC/S7-200为主控,通过PLC控制细分步进电机TB6600驱动器,进而对步进电机进行控制,通过修改程序中参数大小,可以设置脉冲输出个数,实现对于电机细分控制,进而实现对于按摩小球的控制。同时,在步进电机两端的丝杆上装有行程开关和限位保护开关,使得步进电机可以自动换向且进行平稳运动,由于设定有急停按钮,可以实现运动随时中止,提高设备可控性。本文最大的特色在于将驱动器、步进电机、限位开关以及行程开关全部组合在一起,从理论学习转向实际操作,将其应用于实际生活中,解决生活中一些常见问题,使得科技更好的为人类服务。本文设计思想在于让电机输出更加平稳可控,且能自动进行往返运动,提高效率,综合以上优点,该按摩椅不仅坐着舒服,而且还可以缓解使用者身体的不适。
[1]中国按摩椅市场现状分析.http://www.icinet.com.cn/hyzx/gyzz/scfx/2012-06-25/6180.shtml环球资讯,2012.
[2]尤向阳.零起点超快学 PLC技术[M].北京:化学工业出版社,2016.3.
[3]唐佳伟.两相混合式步进电机细分控制器的设计[D].浙江理工大学,2016.
[4]陈忠平,侯玉宝,李 燕.西门子S7-200 PLC从入门到精通[M].北京:中国电力出版社,2015.1.
[5]赵景波,阿 伦,巩 雪.零基础学西门子S7-200 PLC(第2版)[M].北京:机械工业出版社,2013.8.
[6]常 丽.四相步进电机驱动器[J].沈阳工业大学学报,1999(03):225-226+241.
Design of Adjustable Massage Chair Control System Based on PLC
ZHAI Hai-xiang,XIAO Guang-run,WU He-wei
(School of Mechanical and Automotive Engineering,Hubei College of Arts and Sciences,Xiangyang Hubei 441053,China)
In order to alleviate the long-term work after the discomfort of the body,this article uses Siemens PLC designed a massage chair control system for massage chair control system,designed to control the massage chair smooth and efficient work to meet the consumer for adjustable massage chair The use of demand.In order to achieve the above functions,the design system will use Siemens PLC/S7-200 as the main control unit,the stepper motor drive control,and then control the working state of stepper motor.At the same time by the number of high-speed pulse output,the stepper motor speed control,through the sensor response control stepper motor reciprocating movement,so as to drive the screw on the massage ball reciprocating movement.Massage ball is an important part of the massage chair,due to the front of the stepper motor smooth and efficient control,and ultimately the massage chair in accordance with the needs of users to work properly to achieve the purpose of alleviating the user’s physical discomfort.
massage chair;SIEMENS PLC;stepping motor;high speed pulse
TP27
A
1672-545X(2017)09-0213-04
2017-06-10
1.面向高光谱图像分类的函数型数据分析方法研究,湖北省教育厅科学技术研究计划青年人才项目,编号:Q20162603,2016-2017,主持,在研;2.基于函数型数据分析的高光谱图像分类研究,湖北文理学院教师科研能力培育基金,编号:2016ZK014,2016-2017,主持,在研;3.面向机械产品无损检测的高光谱图像处理技术研究,“汽车零部件制造装备数字化湖北省协同创新中心”开放基金,编号:hbuas201514,2015-2017,主持,在研;4.面向微流控芯片微加工形貌特征的视觉评价方法研究,“机电汽车”湖北省优势特色学科群2017年度开放基金项目,编号:XKQ2017037,2017-2018,主持,在研。
翟海祥(1994-),男,湖北枣阳人,本科,研究方向:高端智能装备 ;肖光润(1987-),男,湖北宜城人,博士,讲师,研究方向:高端智能装备、机器视觉;吴何畏(1976-),男,湖北襄阳人,副教授,研究方向:机电一体化及自动化。