基于多体运动学的测量机几何误差敏感性分析
2017-11-17陈徐兵彭芳瑜
郑 妍 ,陈徐兵 ,刘 琴 ,彭芳瑜
(1.华中科技大学无锡研究院,江苏 无锡 214174;2.华中科技大学国家数控系统工程技术研究中心,湖北 武汉430074)
基于多体运动学的测量机几何误差敏感性分析
郑 妍1,陈徐兵1,刘 琴2,彭芳瑜2
(1.华中科技大学无锡研究院,江苏 无锡 214174;2.华中科技大学国家数控系统工程技术研究中心,湖北 武汉430074)
针对专用双臂螺旋桨测量机的几何误差问题,提出一种基于多体运动学的几何误差敏感性分析方法,来保证专用双臂螺旋桨测量机的空间几何精度。针对专用双臂螺旋桨测量机结构及几何误差关系,建立了考虑运动几何误差的运动学模型。运用多体运动学理论求解相邻体间的特征变换矩阵,根据测量机装配几何误差和运动几何误差建立测量机空间误差模型。通过运动轴几何误差对螺旋桨测量精度的对比验证,结果表明该算法能实现专用双臂螺旋桨测量机的几何误差敏感性分析。
专用双臂螺旋桨测量机;几何误差;多体运动学;敏感性分析
专用双臂螺旋桨测量机(以下简称“测量机”)是针对大型复杂船用螺旋桨实现叶面、叶背非接触式同步测量的专用测量装备,它对提高螺旋桨测量精度、测量效率及测量过程自动化具有重要意义。然而由于测量机制造安装误差、热变形及运动误差等因素影响,测量过程中机器实际运动位置与理论运动位置存在较大误差,对螺旋桨的测量精度产生不利影响。
测量机的空间几何误差建模方法与数控机床的误差建模方法类似。数控机床的误差建模方法经历了几何建模法、误差矩阵法、二次关系模型法、机构学建模法、刚体运动学法等几个发展阶段[1-2],目前多体系统运动学建模方法[3]最受推崇。
测量机空间几何误差建模方法与数控机床的误差建模方法类似,而数控机床组成的系统是典型的多体系统[4]。文献[5-6]基于多体运动学原理,提出了机床相邻体间特征变换矩阵的概念[5],建立考虑机床多种误差的特征矩阵[6]。
本文以多体系统运动学建模方法为基础,分析测量机结构及运动链传递关系,对测量机几何误差进行具体分类讨论,分别建立测量机理想状态下和考虑几何误差状态下的特征变化矩阵,得到测量机空间几何误差模型。通过实验分析验证,得出各个运动轴6项几何误差分量对空间几何误差作用的主次关系。
1 测量机形式
测量机机械结构如图1所示,机械结构主要由线性X轴、线性Z轴、线性U轴、线性W轴和旋转C轴组成,此外还包括辅助轴Y轴和上下激光测头。
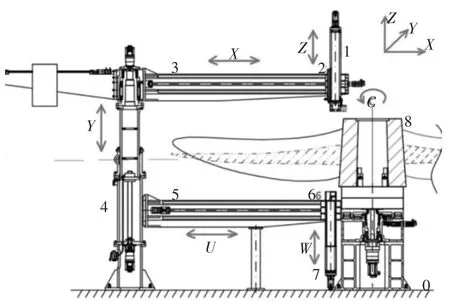
图1 测量机机械结构
基于多体系统理论将测量机中各个运动轴和机身看成独立的“体”,分析各联动轴之间的连接方式,绘制出测量机的拓扑结构图,如图2所示。4表示测量机床身,相对于大地静止;3表示线性X轴,可以沿着上测量臂水平移动;2表示线性Z轴,可以上下移动;1表示上激光测头,它通过夹具固定在Z轴上;8表示旋转轴C,它通过夹具固定在测量机上;5表示线性U轴,可以沿着下测量臂水平移动;6表示线性W轴,可以上下移动;7表示下激光测头,通过夹具固定在W轴上。
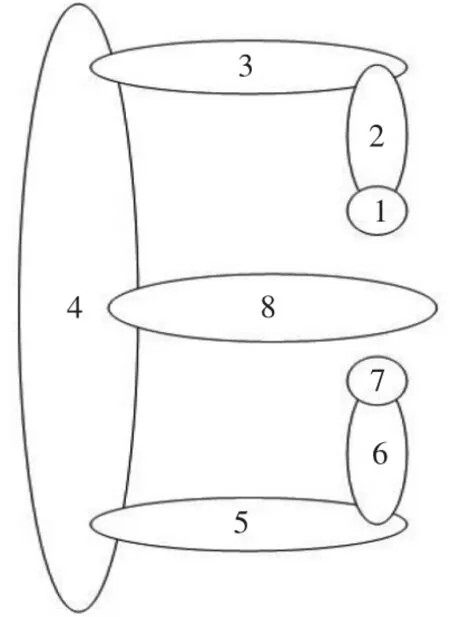
图2 测量机拓扑结构
为了建立测量机的运动学模型,基于多体系统理论,对每个独立的体建立对应的体坐标系,也可叫局部坐标系,如图3所示。图中坐标系O4表示测量机坐标系,定为基坐标系;O3表示线性X轴的局部坐标系;O2表示线性Z轴的局部坐标系;OST表示上激光测头局部坐标系;Ow表示旋转轴C的局部坐标系;O5表示线性U轴的局部坐标系;O6表示线性W轴的局部坐标系;OXT表示下激光测头的局部坐标系。
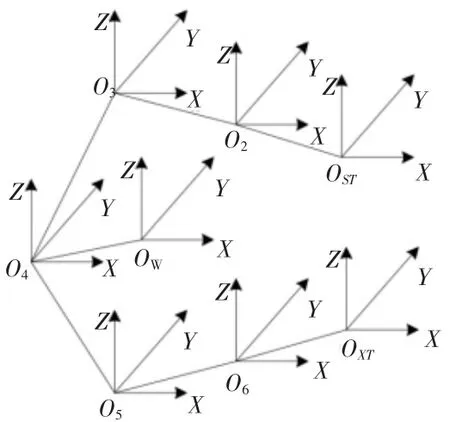
图3 测量机联动轴坐标系
从图3可以看出,测量机的运动链由上下激光测头两条运动链组成,螺旋桨上表面运动链传递关系为:上激光测头-Z轴-X轴-床身-C轴-螺旋桨上表面;螺旋桨下表面运动链传递关系为:下激光测头-W轴-U轴-床身-C轴-螺旋桨下表面。
2 考虑几何误差的测量机运动学模型
2.1 测量机垂直度误差
实际测量机由于安装、制造等因素的影响,各联动轴之间存在垂直度误差和平行度误差,因上测量臂可以绕Y轴旋转调整位置,平行度误差可人为消除。垂直度误差会影响测量机的测量精度。垂直度误差分为运动轴对平面的垂直度误差和运动轴之间的垂直度误差,测量机在测量过程中,各轴的垂直度误差随轴的位置不同而产生对应的位置误差。为方便空间误差计算,将垂直度误差分解为绕X、Y、Z三个方向的角度误差,并随轴的运动引起沿X、Y、Z方向的位置误差。
(1)上激光测头到地面运动链垂直度误差
线性Y轴与地面垂直度误差:
如图4所示,l1为Y轴在初始位置时的局部坐标系原点到地面的距离,k为Y轴从局部坐标系原点移动的位移,gαk为Y轴相对于地面绕X方向的角度误差,gβk为Y轴相对于地面绕Y方向的角度误差,gγk为Y轴相对于地面绕Z方向的角度误差。其中 l1、k 为已知值,gαk、gβk、gγk为测量值。设△Xk、△Yk、△Zk分别为Y轴在X、Y、Z方向的位置误差,因Y轴与地面垂直度误差在Z方向分量极小,所以△Zk可忽略不计,△Xk和△Yk可由 l1、k、gαk、gβk计算得到。


图4 Y轴与地面垂直度误差分解
(2)上测量臂与线性Y轴垂直度误差
如图5所示,l2为Y轴、X轴初始位置时局部坐标系原点之间的距离,x为X轴从局部坐标系原点移动位移,kαx为上测量臂相对Y轴绕X方向角度误差,kβx为上测量臂相对Y轴绕Y方向的角度误差,kγx为上测量臂相对Y轴绕Z方向的角度误差。其中l2、x 为已知值,kαx、kβx、kγx为测量值。设△Xx、△Yx、△Zx分别为X轴在X、Y、Z方向的位置误差,因上测量臂与Y轴垂直度误差在X方向分量极小,所以△Xx可忽略不计,△Yx和△Zx可由 l2、x、kβx、kγx、gβk、gγk计算得到。

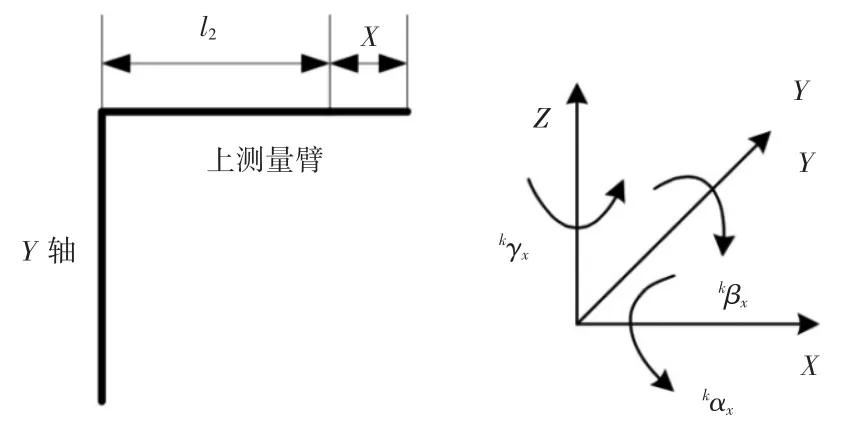
图5 上测量臂与Y轴垂直度误差分解
(3)线性Z轴与上测量臂垂直度误差
如图6所示,l3为Z轴、X轴在初始位置时局部坐标系原点在Z方向的距离,z为Z轴从局部坐标系原点移动的位移,xαz为Z轴相对于上测量臂绕X方向的角度误差,xβz为Z轴相对于上测量臂绕Y方向的角度误差,xγz为Z轴相对于上测量臂绕Z方向的角度误差。其中 l3、z 为已知值,xαz、xβz、xγz为测量值。设△Xz、△Yz、△Zz分别为 Z 轴在 X、Y、Z 方向的位置误差,因Z轴与上测量臂垂直度误差在Z方向分量极小,所以△Zz可忽略不计,△Xz和△Yz可由l3、z、xαz、kαx、gαk、xβz、gβk计算得到。

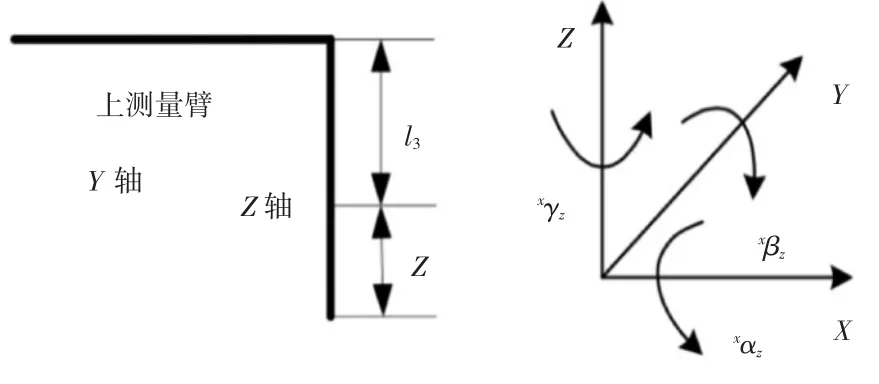
图6 Z轴与上测量臂垂直度误差分解
(4)旋转轴C到地面运动链垂直度误差
如图7所示,l6为C轴局部坐标系原点到地面距离,gαc为C轴相对于地面绕X方向角度误差,gβc为C轴相对于地面绕Y方向角度误差,gγc为C轴相对于地面绕 Z 方向的角度误差。其中 l6已知,gαc、gβc、gγc为测量值。
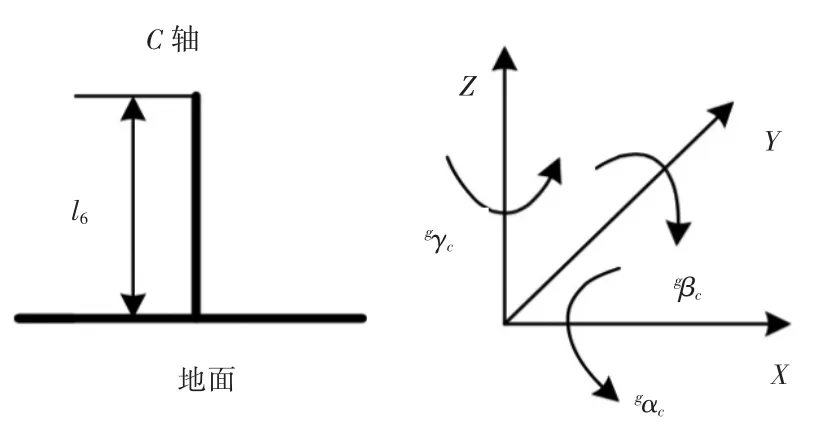
图7 C轴与地面垂直度误差分解
设△Xc、△Yc、△Zc为 C 轴在 X、Y、Z 方向的位置误差,因C轴与水平面垂直度误差在Z方向分量极小,△Zc忽略不计,△Xc和△Yc可由 l6、gαc、gβc计算得到。

3 基于多体系统运动学的测量机空间几何误差建模
在多体系统中,体坐标系之间的关系可以由4×4阶齐次矩阵来描述。测量机各联动轴局部坐标系间的关系用4×4阶齐次矩阵表示,可使各局部坐标系间的变换转化成矩阵间的数量运算,方便测量机空间几何误差建模与计算。
3.1 测量机理想状态下相邻体间的特征变换矩阵
为得到测量机激光测头在理想状态下的空间位置,需建立测量机各联动轴相邻坐标系理想坐标变换矩阵。
(1)上激光测头运动链:上激光测头-Z轴-X轴-床身-C轴
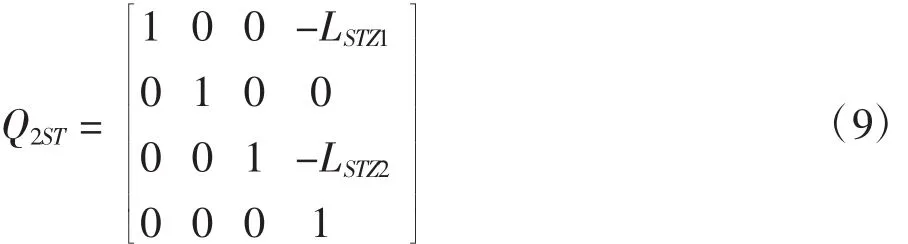
上激光测头到Z轴的理想坐标变换矩阵
Z轴到X轴的理想坐标变换矩阵
X轴到Y轴的理想坐标变换矩阵

Y轴到C轴的理想坐标变换矩阵
C轴到工件的理想坐标变换矩阵
式中,各参数含义如下:
LSTZ1表示上激光测头局部坐标系到Z轴局部坐标系沿x向偏移距离;
LSTZ2表示上激光测头局部坐标系到Z轴局部坐标系沿z向偏移距离;
L1表示X轴局部坐标系到Y轴局部坐标系沿x向偏移距离;
L2表示Y轴局部坐标系到C轴局部坐标系沿x向偏移距离;
L3表示Y轴局部坐标系到C轴局部坐标系沿z向偏移距离。
3.2 测量机考虑几何误差后相邻体间的特征变换矩阵
为得到测量机激光测头在考虑几何误差影响后的实际空间位置,需建立测量机各联动轴相邻坐标系实际坐标变换矩阵。由于激光测头通过夹具安装在运动轴上后,与运动轴没有相对运动,所以不存在运动几何误差。
(1)上激光测头运动链
Z轴到X轴的实际坐标变换矩阵

X轴到Y轴的实际坐标变换矩阵
Y轴到C轴的实际坐标变换矩阵
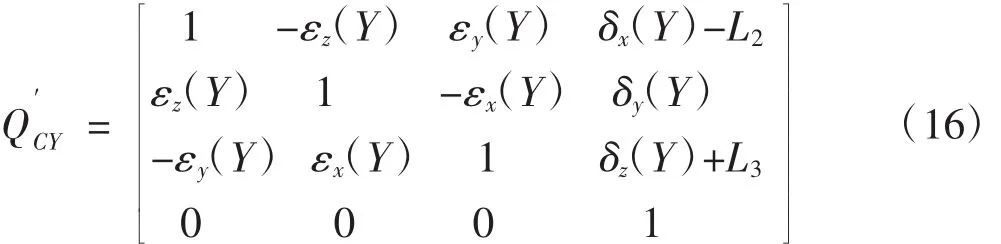
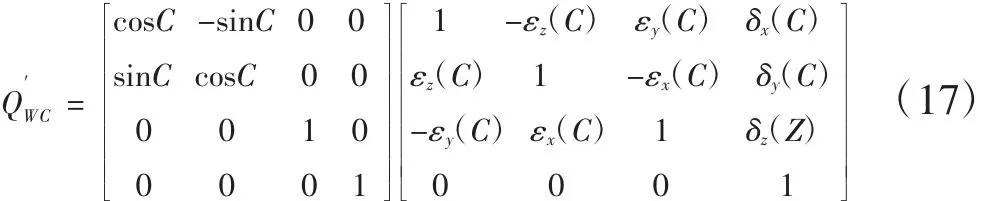
C轴到工件的实际坐标变换矩阵
3.3 测量机空间误差模型的建立
根据以上各相邻运动轴之间的变换关系,得到理想情况下激光测头坐标系到工件坐标系的转换矩阵和实际激光测头坐标系到工件坐标系的转换矩阵,并且可算出激光测头运动几何综合误差变换矩阵,结合垂直度误差,得到测头综合误差矩阵,最终建立测量机空间误差模型。
上激光测头坐标系到工件坐标系的理论变换矩阵和实际变换矩阵位:

令Es=为上激光测头运动几何综合误差变换矩阵,
由Q′WST=QWSTEs,可得:

上激光测头空间位姿误差如下:
由此可得上激光测头综合误差矩阵
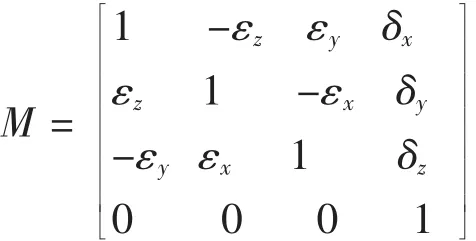
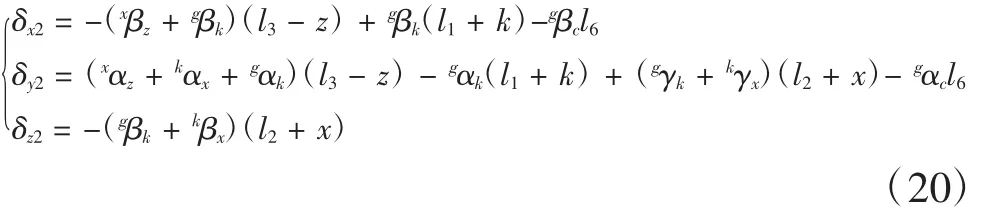
其中:

设测量机上测头位置点Q在上激光测头坐标系中的坐标为 Qt=(Qx,Qy,Qz,1),点 Q 在工件理想坐标系与实际坐标系之间的差值为:

式22即为测量机空间几何误差模型,根据测量机几何误差测量与求解可得到上述特征矩阵的参数值,代入式22得到测量机空间几何误差模型数学表达式。
4 测量机几何误差敏感性分析
研究各运动轴几何误差对螺旋桨叶面叶背测量精度的影响时,涉及的变量有6个运动轴,每个轴有6项误差分量。在未考虑耦合误差影响的情况下,计算单一轴、单一方向误差产生的拟合曲面法向误差值,根据拟合曲面法向误差值的大小确定影响螺旋桨叶面叶背测量精度的主要因素和次要因素。
4.1 测量机各轴误差分量影响分析
测量机为上下双联动结构,运动轴数较多,造成测量机运动几何误差分量也较多,这样就为综合几何误差求解和几何误差标定带来了巨大的困难。因此必须分析各运动轴各项误差对测量机测量误差的影响效果,指导后续的空间几何误差补偿和误差标定工作。
以3400螺旋桨1号叶片模型为实验对象,分别对上激光测头-Z轴-X轴-床身-C轴和下激光测头-W轴-U轴-床身-C轴两条运动链各误差分量进行分析。针对单一轴、单一方向误差分量,误差等级分别为 0.001,0.005,0.025,0.125.首先根据设计模型参数点x,y,z坐标值转换成G代码后,在G代码正解过程中考虑某一运动轴某一误差传递矩阵,得到实际点 x′,y′,z′坐标值,通过设计模型参数点 x,y,z和实际点 x′,y′,z′拟合的曲面法向误差值分析误差影响大小,表1和表2分别为叶片上表面运动链C轴误差分量实验数据和Y轴误差分量实验数据。
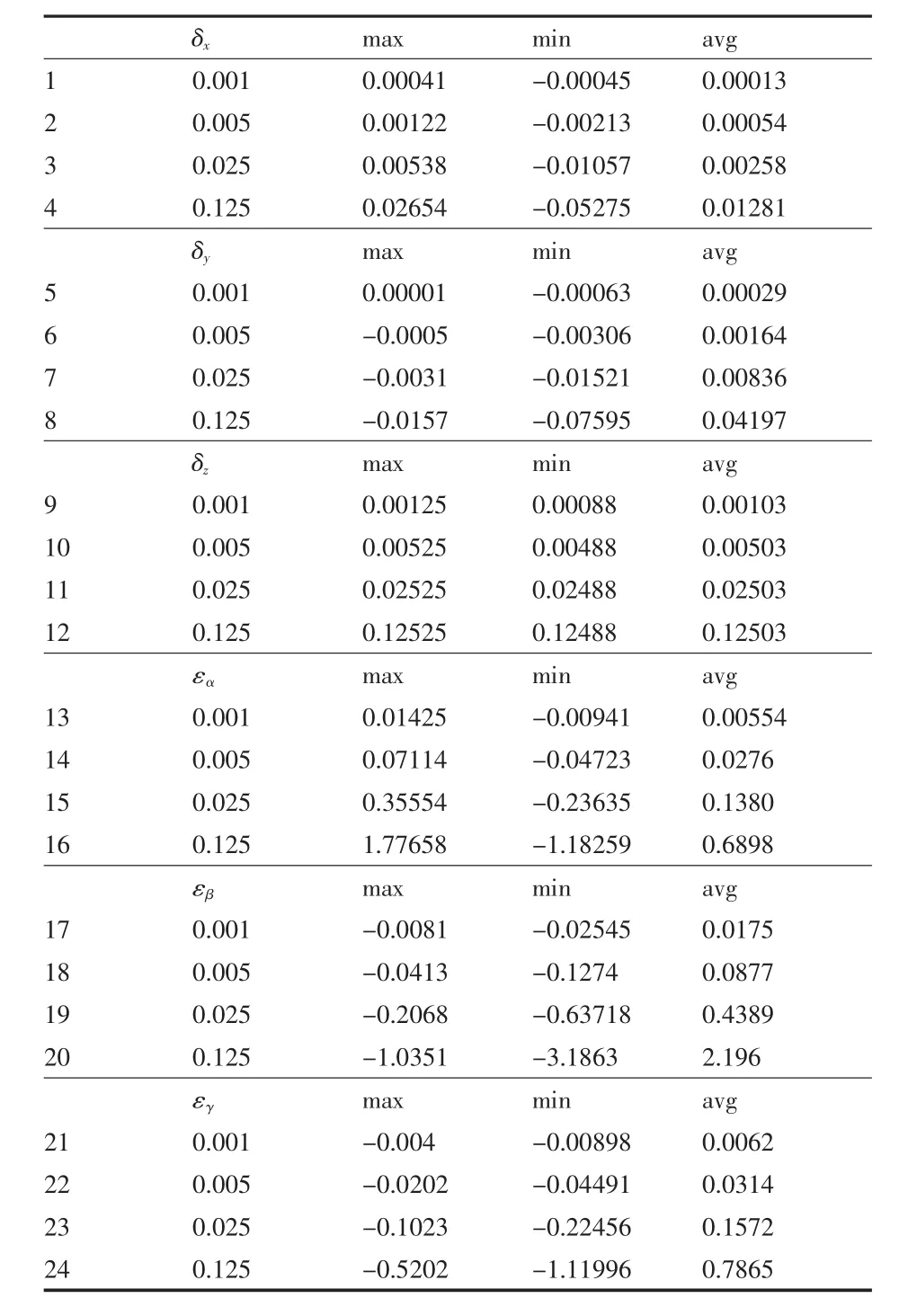
表1 C轴误差分量实验数据(单位:mm)
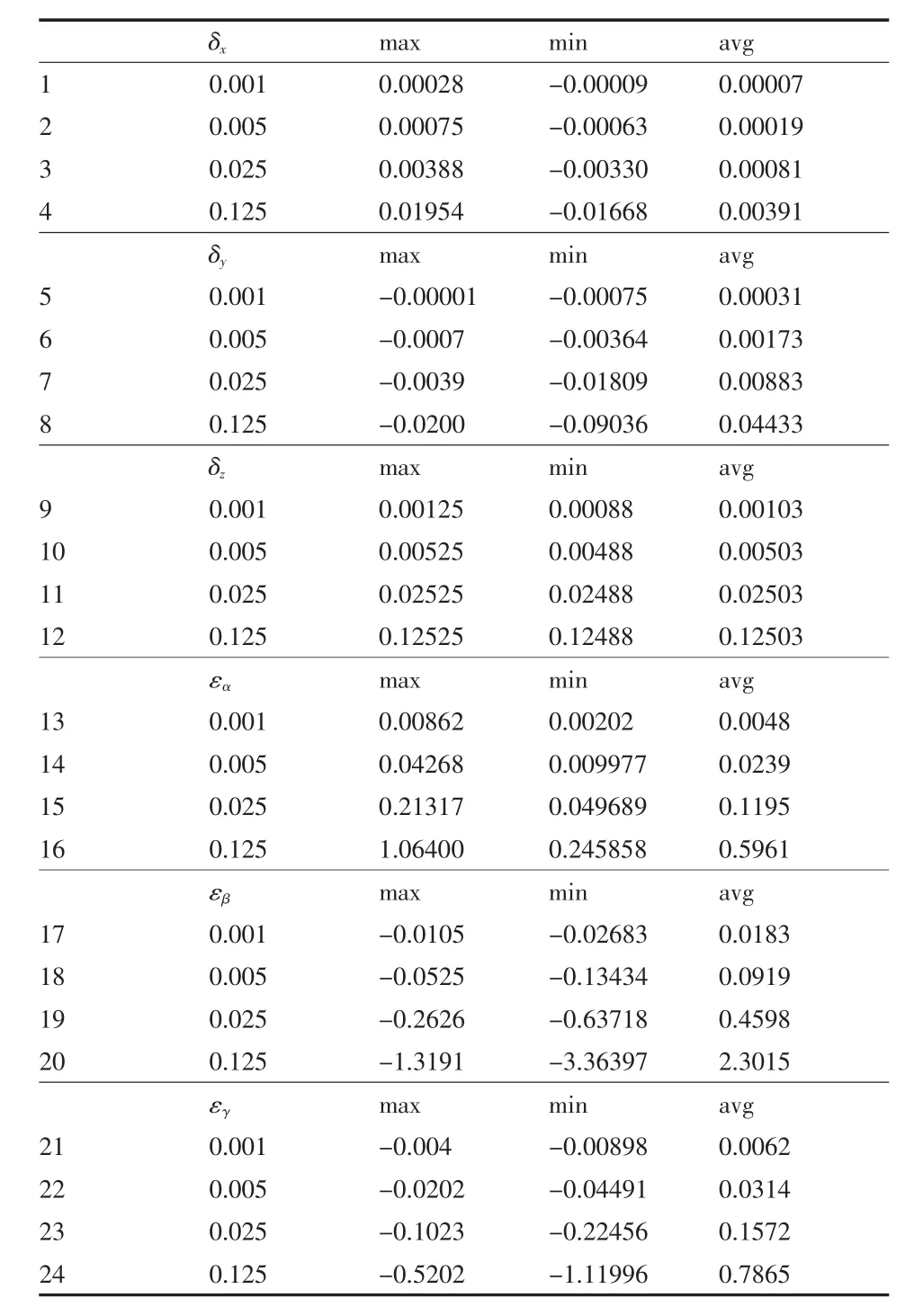
表2 Y轴误差分量实验数据(单位:mm)
同理计算出X轴、Z轴、U轴、W轴和叶片下表面运动链C轴实验数据。
4.2 测量机几何误差敏感性分析
根据上下运动链各轴误差分量实验数据可得到上下叶片传动链误差影响分析表,如表3所示。

表3 上叶片传动链误差影响分析表
(续下表)
(续上表)
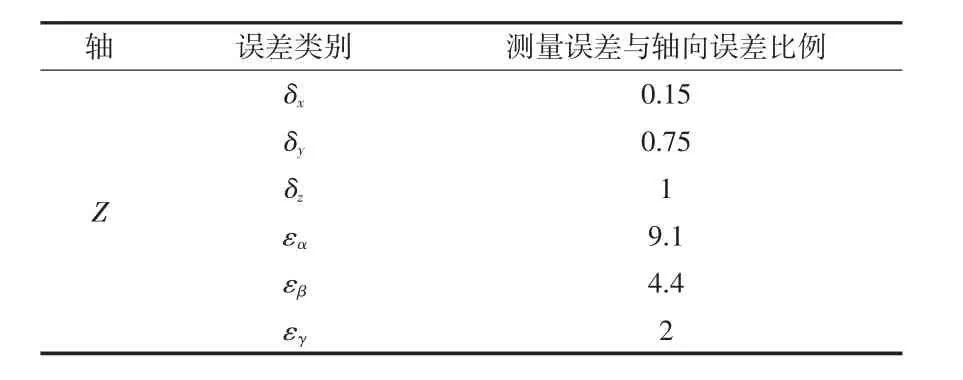
轴误差类别 测量误差与轴向误差比例δx Z 0.15 δy 0.75 δz 1 εα 9.1 εβ 4.4 εγ 2
通过比较测量误差与轴向误差比例大小分析上下运动链关节误差分量对最终测量精度的影响大小,上叶片:
Y(εβ) > C(εβ) > X(εα) > C(εα) > Z(εα)> Y(εγ)=C(εγ)=Y(εα)> X(εβ)> Z(εβ)>>其他
从结果可以看出上运动链中Y轴绕Y方向的角度误差对螺旋桨桨叶上表面轮廓测量误差影响最大,下运动链求解方法类似。总体看来,各轴的角度误差比位置误差对桨叶表面测量误差的影响大。
5 结论
本文对专用双臂螺旋桨测量机空间几何误差模型进行研究,分析测量机组成结构和运动链传递关系,运用多体运动学理论得到相邻体间的特征变换矩阵,建立测头到工件的运动学模型,通过测头位置点建立测量机空间误差模型。通过实验验证运动轴几何误差对螺旋桨测量精度影响,结果表明该算法能实现专用双臂螺旋桨测量机的几何误差敏感性分析。
[1]Rahman M,Heikkala J,Lappalainen K.Modeling,Measurement and error compensation of multi-axis machine tools[J].International Journal of Machine Tool&Manufacture,2000,40:1535-1546.
[2]Eman K F,Wu B T.A generalized geometric error Model for multi-axis Machines[J].Annals of CIRP,1987,36(1):253-256.
[3]郭 辰.多功能数控铣床几何误差补偿技术的研究[D].沈阳:沈阳工业大学,2005.
[4]王小平,姚英学,荆怀靖.数控机床几何误差建模及误差补偿的研究[J].机械工程师,2005(09):18-20.
[5]粟时平,李圣怡.五轴数控机床综合空间误差的多体系统运动学建模[J].组合机床与自动化加工技术,2003(5):17-20,23.
[6]郭 辰,杨 林,李庆勇.基于多体系统理论的数控机床误差建模[J].机械设计与制造,2005(3):123-125.
Sensitivity Analysis of Geometric Error of Measuring Machine Based on the theory of Multi-body System
ZHENG Yan1,CHEN Xu-bing1,LIU Qin2,PENG Fang-yu2
(1.HUST-Wuxi Research Institute,Wuxi Jiangsu 214174,China;2.National NC System Engineering Research Center,Huazhong University of Science&Technology,Wuhan Hubei 430074,China)
A geometrical error sensitivity analysis method based on the theory of multi-body system is proposed to ensure the geometric accuracy of the special two-arm propeller measuring machine.A kinematic model considering the geometric error of motion is established for the relationship between the structure and geometric error of the special propeller measuring machine.The mult-body system theory is used to solve the feature transformation matrix between adjacent bodies,and the error model is established according to the geometric error and the motion geometry error of the special measuring machine.The results show that the algorithm can realize the geometric error sensitivity analysis of the special two-arm propeller measuring machine by comparing the geometric error of the motion axis with the accuracy of the propeller.
special two-arm propeller measuring machine;geometric error;multi-body system theory;sensitivity analysis
TP391.7
A
1672-545X(2017)09-0093-06
2017-06-01
国家科技支撑计划(编号:SQ2015BAJY2541);江苏省“双创计划”人才项目;江苏省产学研前瞻性联合研究项目(编号:BY2015022-03)
郑 妍(1989-),女,江苏无锡人,硕士,工程师,研究方向:机械工程;陈徐兵(1982-),男,江苏南通人,工程师,硕士,华中科技大学无锡研究院工程师;刘 琴(1989-),女,江苏泰州人,学生,硕士,华中科技大学国家数控系统工程技术研究中心硕士研究生;彭芳瑜(1972-),男,江西宜丰人,高级工程师(教授、博导),博士,华中科技大学国家数控系统工程技术研究中心教授、博士研究生导师。