基于模型的设计方法的无刷直流电机控制研究
2017-11-17张才斗
张才斗,马 杰
(长安大学 工程机械学院,陕西 西安710064)
基于模型的设计方法的无刷直流电机控制研究
张才斗,马 杰
(长安大学 工程机械学院,陕西 西安710064)
用基于模型的设计方法开发电机控制系统是一种快捷有效地方法。以无刷直流电机为被控制对象,利用Simulink、Stateflow搭建逻辑算法模型,在MATLAB平台上进行实现,经过模拟验证,直接自动生成代码下载到目标板上。设计者只需要了解工作原理,降低了嵌开发的难度,提高了开发效率,缩短了项目完成时间。
基于模型的设计方法;自动生成代码;Simulink
随着电力电子,集成电路的快速发展,无刷直流电机因其具有调速方便、易于控制和优良的调节使得无刷直流电机广泛应用于数控机床、航空航天、计算机外围设备等高科技领域中[1-3]。由于DSPTMS320F2812芯片具有强大的运算能力、可靠性逻辑控制功能和各种中断处理功能,所以用DSP去控制无刷直流电机可以实现无刷直流电机高精准的控制及运行[4-5]。在基于DSP有位置无刷直流电机控制系统设计中,文献[6],[7]系统软件中软件的I/O口的功能、PWM模块的配置、逻辑导通及其算法的实现是用C语言去完成。这样使得设计者要学会将电机的状态转换为C语言,增长了开发时间。文献[8],[9]中Matlab上通过Simulink上搭建的仿真模型将模仿真的结果与理论分析进行验证模型的正确,而不能将搭建的模型进行试验。
本文采用基于模型的设计方法自动生成代码,以TI公司和MathWorks公司联合开发的Embed Coder工具箱为依托,采用TMS320F2812芯片作为主处理器,以无刷直流电机为被控对象,直接实现从设计理念到算法模型,再由模型自动生成嵌入式代码的高效开发流程,设计者需要了解无刷直流电机及TMS320F2812的工作原理,只需注算法本身,将繁琐的代码生成工作交给计算机完成,创新点在于不用考虑复杂的代码编辑,缩短开发周期。并且搭建的算法模型不仅能通过软件在环进行仿真,还能自动生成代码进行试验。
1 原理分析
无刷直流电机系统由电动机本体、转子位置检测器和由控制电路和逆变桥电路构成的换相装置三大部分组成。系统结构如图1所示。无刷直流电机用定子上安装电枢绕组、转子上安装永久磁体,并用位置检测器检测转子的位置,检测到的转子位置信号通过控制电路处理后送给功率逆变桥电路,由功率逆变桥电路驱动电机连续运转。
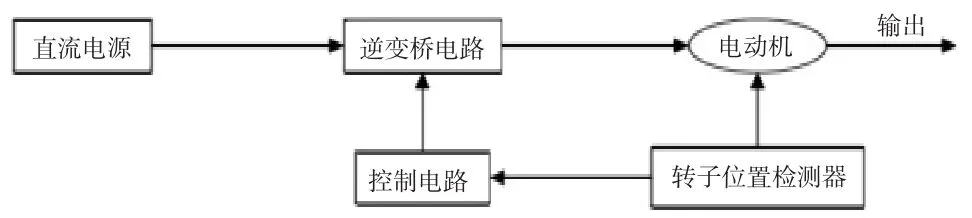
图1 无刷直流电机系统基本结构
下面以Y接三相全桥两两导通方式为例,来简要介绍无刷直流电机的工作过程,无刷直流电机三相全控电路图如图2所示,采用两两导通方式驱动,每隔60°电角度换相一次,每次只改变一个功率管,每个功率管导通角度为120°电角度。图中包含6个晶体管、二极管组成的三相逆变电路,Ha、Hb、Hc为霍尔元件反馈的转子位置信号,控制电路根据霍尔元件反馈的转子位置信号决定6路PWM信号的通断或导通,使电机定子绕组按照一定的次序通断,实现自动电子换相,从而使电机连续运转。
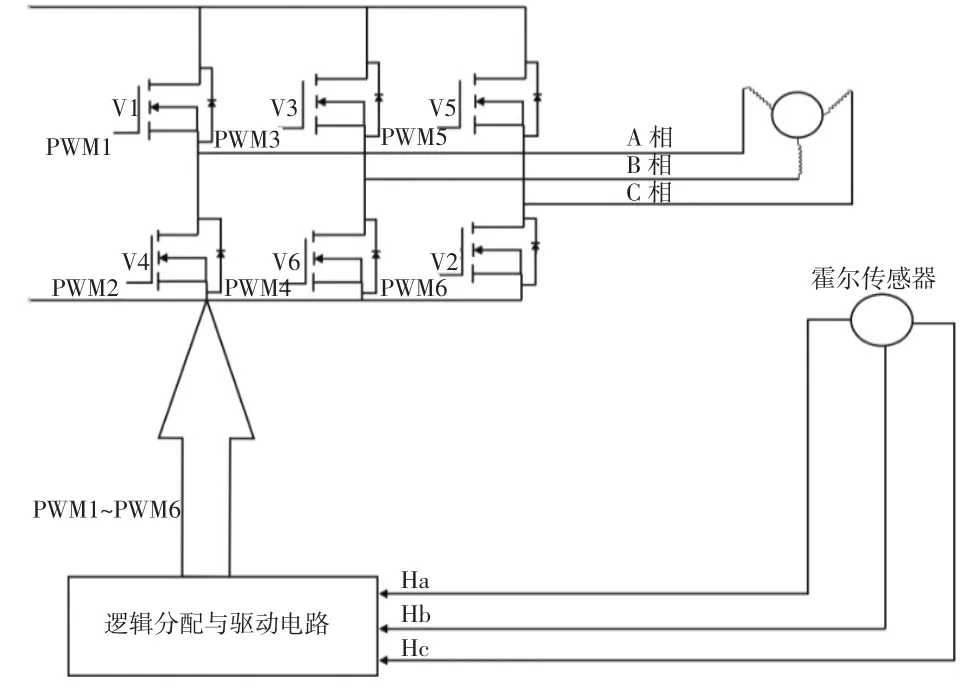
图2 无刷直流电机全控电路结构图
三个霍尔传感器对称分布在定子圆周上,当转子N极靠近霍尔传感器,即磁感应强度到达一定值时,霍尔传感器输出高电平,当N极逐渐离开霍尔传感器,电磁强度逐渐减小,但输出仍为高电平,只有当磁场变为S极并达到一定值时,其输出才翻转为低电平。转子转动,N-S极磁场交替转换霍尔传感器输出的波形的高低电平比例相等,各占50%.即每个霍尔传感器都会输出180°脉宽的输出信号,如图3所示。无刷直流电机的准确换相就是依据这三个霍尔传感器输出信号的组合来确定的。每个周期内,霍尔传感器输出状态数和电机工作状态意义对应,在两两导通的方式中,一个周期内,共有6个工作状态,表1表示电机的工作状态与三个霍尔传感器输出的状态的对应关系。
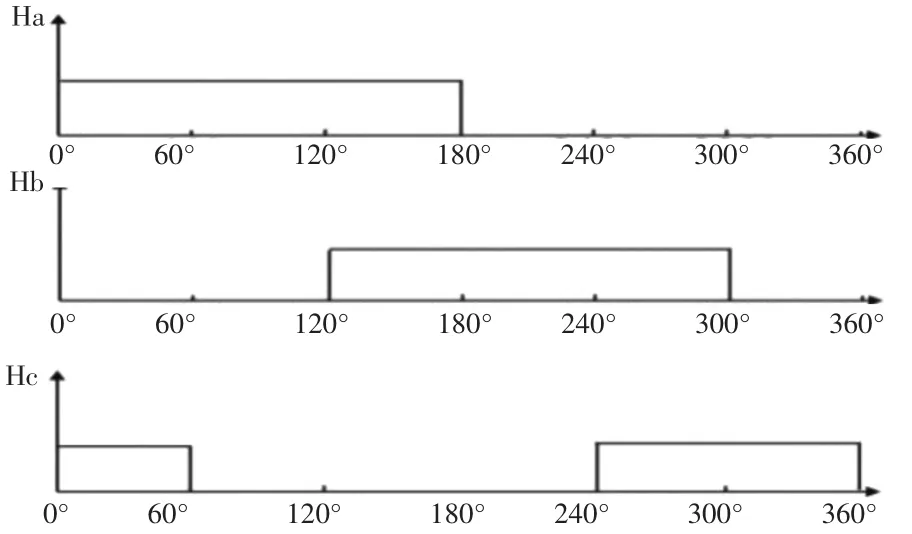
图3 霍尔位置传感器输出三相霍尔信号波形图
假设当前功率管V3、V6导通,则电流从B相流入电机,从C相流出电机,由电流经绕阻产生的磁场方向为(B,-C)。由 B和-C的定子电枢绕组合成磁矩使转子转动到BC位置。转子的转动使得霍尔传感器的输出发生变化,控制电路会据此调整功率管的导通情况,将 V6关断,V1导通。这时,电流从 B相流入电机,从A相流出电机,经绕阻产生的磁场方向为(B,-A)。由 B和-A的定子电枢绕组合成磁矩使转子转动到BA位置。同样,霍尔器件又会输出一个不同的值,控制电路根据霍尔元件的输出作出相应的处理,完成一个完整的换相周期。
2 模型搭建
通过上述原理分析,在Stateflow中创建正转、反转状态图,以dir的值控制电机的正反转,由此得到无刷电机的正反转的状态图,如图4所示。
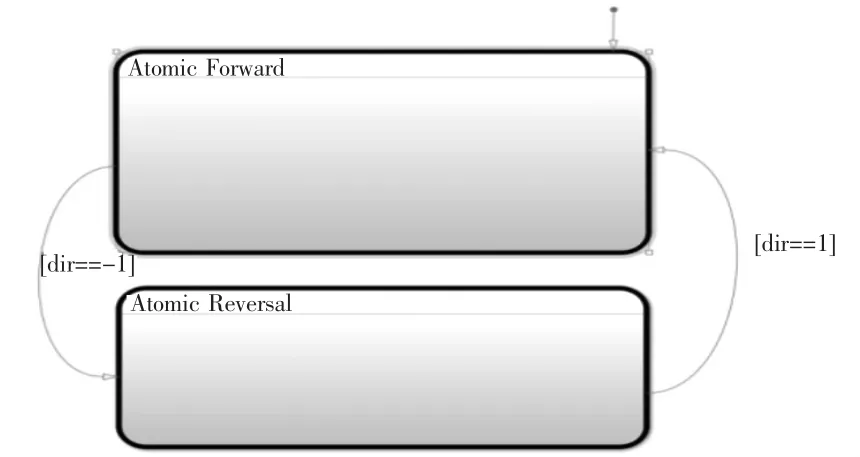
图4 无刷电机的正反转的状态图
根据表1霍尔传感器输出与开关状态对应关系表及控制逻辑,sensor的值及其功率开关的导通情况,得到正转状态图,如图5所示。模型接收霍尔元件传送回的电机转子位置信号,并以此判断功率开关的通断跟PWM波形输出的极性。当霍尔元件返回值为1时,T=0x7FD,十六进制7DF转化为二进制为011111111110,则1、6路PWM 信号导通,并且极性值为PWM1为低有效,PWM2强制高,PWM3为强制高,PWM4为强制高,PWM5为强制高,PWM6为高有效;其他值类似。
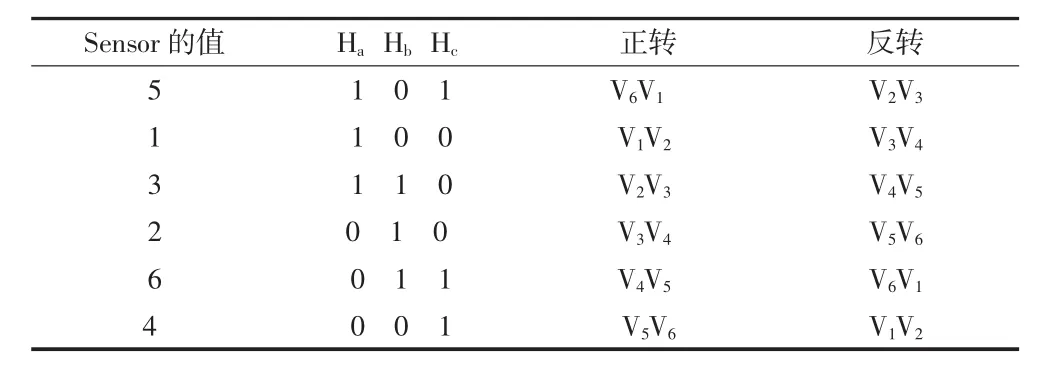
表1 霍尔传感器
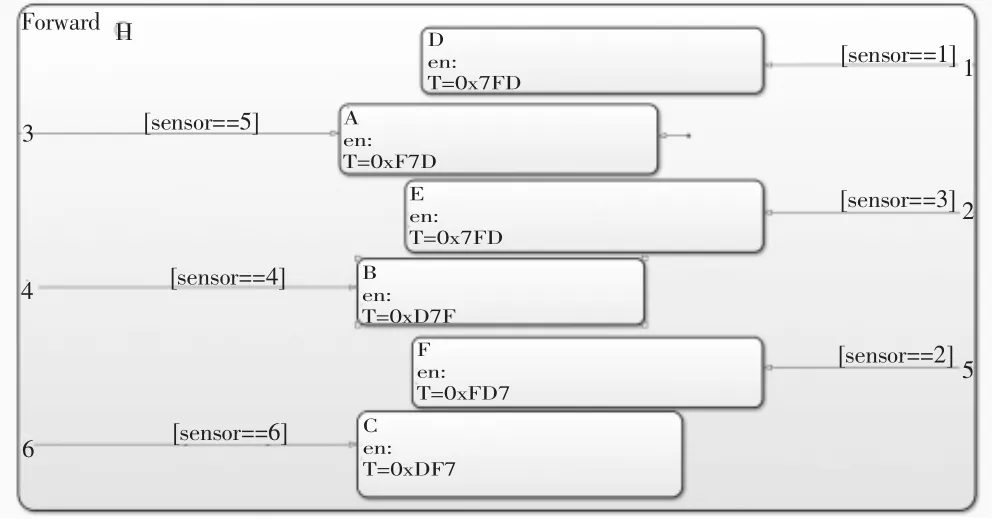
图5 正转状态图
Reversal子状态跟Forward的子状态基本类似,不同之处在于:模型接收霍尔元件传送回的电机转子位置信号,导通的功率开关不同,并且极性不同。
如表1所示,sensor的值为4时,5、6路PWM信号导通。将stateflow模块再配合Simulink的库模块即可完成如图6的算法模型。当dir=1时,电机处于正转,霍尔传感器的状态为4时,Stateflow中T=0xD7F,十六进制D7F转化为十进制为3455,则5、6路PWM信号导通,输出的值为3455这证明算法模型达到了预期目的。而PWM信号占空比可用于调节电机转速。在PWM占空比的设置只需要将PWM模块中的Outputs选项下面的将各个PWM使能,并且Duty cycle设为想要的占空比,点击OK即可。如图7所示。
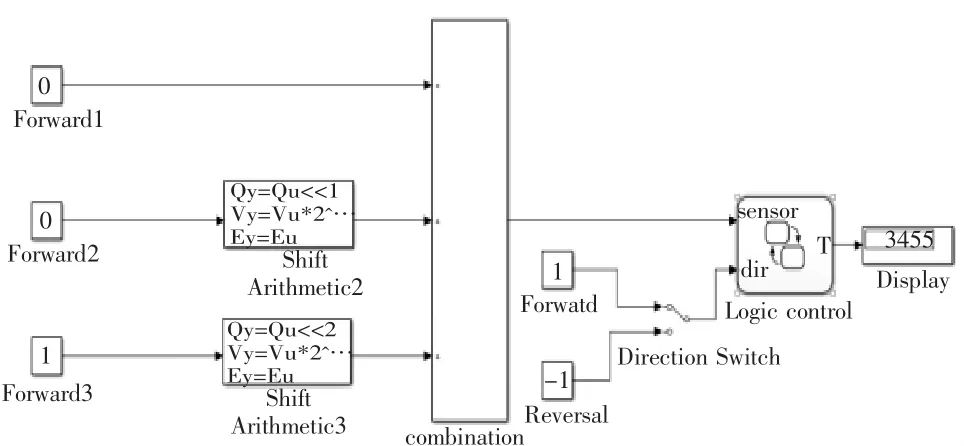
图6 算法模型

图7 PWM占空比的设置
最后的生成代码模型如图8所示。

图8 代码模型
3 结束语
基于模型的设计为设计者提供了一个开发通用平台,可将模型自动生成嵌入式C代码,大大降低了嵌入式系统开发的门槛,设计者可轻松生成优化的C代码,减少了很多认为错误,大大缩短开发周期。
[1]吴布托,浅谈DSP在无刷直流电机控制系统中的应用[J].科技信息,2011(31):1.
[2]高慧敏,桂天真,崔儒飞,等.无刷直流电机PID调节参数整定研究[J].装备制造技术,2014(9):1.
[3]薛粹松,王 英.基于TMS320F2812的DS_省略_刷直流电机控制系统的研究及其仿真[J].变频器世界,2015(3):1-2.[4]李惠生,王 瑞.DSP在无刷直流电机控制中的应用研究[J].机电一体化,2014,11(6):1-2.
[5]卢小锦,基于DSP_BIOS的无刷直流电机控制系统的研制[J].自动化技术与应用,2011,30(5):2-3.
[6]刘海锋,DSP控制系统在无刷直流电机调速中的应用[J].仪器仪表用户,2012,3(10):1-2.
[7]黄 斌,DSP在无刷直流电机控制系统中的运用[J].防爆电机,2016,6(14):3-4.
[8]刘兆卿,王喜太,王 淼,等.基于DSP无刷直流电机控制系统的研究及其仿真[J].微计算机信息,2011,27(9):1-3.
[9]乔敏娟,韩文波,刘莹莹,等.基于DSP的无刷直流电机闭环控制系统的设计[J].计算机与现代化,2014(1):2-5.
Research on Brushless DC Motor Control Based on Model Design Method
ZHANG Cai-dou,MA Jie
(Chang’an University,School of Mechanical Engineering,Shaanxi Xi’an 710064,China)
It is a quick and effective method to develop a motor control system with a model-based design method.With the brushless DC motor as the controlled object,using Simulink,Stateflow to build the logic algorithm model,in the MATLAB platform to achieve,through simulation verification,direct automatic generation of code downloaded to the target board.Designers only need to understand the working principle,reducing the difficulty of embedded development,improve the development efficiency,shorten the project completion time.
model-based design method;automatic generation of code;Simulink
TM361
A
1672-545X(2017)09-0066-03
2017-06-06
张才斗(1991-),男,山东潍坊人,硕士研究生,主要研究方向:电机控制、simulink仿真、dsp控制。