注塑机械手单片机系统设计
2017-11-17王荣朝
王荣朝
(长安大学,陕西 西安710064)
注塑机械手单片机系统设计
王荣朝
(长安大学,陕西 西安710064)
主要以注塑机机械手的控制系统展开论述,完成了硬件电路设计及软件设计,包括输入输出模块,步进电机控制,单片机的选型,各驱动模块的选择等。采用单片机作为CPU(Central Processing Unit)的注塑机械手控制系统。针对不同模块,采用相应的电路设计。主要介绍主控制部分的电路设计,机械手采用双自由度,由28BYJ-48的步进电机作执行元件,步进电机采用ULN2003芯片驱动模块,控制器方面采用AT89C52单片机以及复位电路、晶振电路的设计整合,键盘输入采用4×4简易矩阵键盘,显示屏采用数码管显示,由PS7219芯片驱动,最后通过整体硬件电路图进行仿真模拟。该机械手在保证其原有性能的前提下,使其性价比、体积、结构、价格和外形等均有所改善,设计出的各调整环节,很大程度上提高了人们对工具的使用便捷性。
注塑机机械手;机械手控制电路设计;单片机;步进电机
工业机械手是在近几十年迅猛发展起来的高科技自动化生产设备之一。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上同时具有人和机器的优点,尤其体现了智能性和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景[1-2]。机械手是一种新式机械装置,它的发展得益于机械化、自动化的生产过程。机械手在各类自动生产线中广泛运用,尤其是在现代工业生产化过程中。作为一门新兴的科技技术,机械手的开发和生产已在高技术领域内蓬勃发展,并使得自动化和机械化与机械手更完善的有机结合起来。机械手虽然大多较为笨重,但它的可重复劳动、不怕危险和极端环境、力量大等特点,为人类减轻了诸多负担。因此,机械手的应用越来越广泛。
机械手技术涉及力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术[3]。机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作[4]。
1 机械手的结构及动作过程
机械手结构如图1所示。
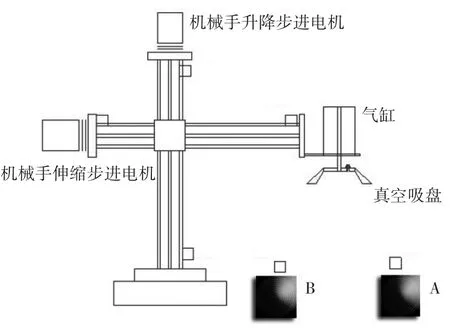
图1 机械手结构示意图
机械手的动作过程如下:
机械结构:机械手手臂在水平方向的运动即左右运动由伸缩步进电机控制;垂直方向的运动即上下运动由升降步进电机控制;夹紧装置采用气缸和真空吸盘,整个夹紧与松开由电磁阀控制吸盘的空气来实现。要完成上述动作,该系统还必须具备步进电机驱动模块和单片机控制模块。
该注塑机械手的运动方式和工作过程如下:
(1)机械手可以根据预先设定的程序将工件从A处搬运到B处。
(2)动作过程如图2所示,按次序依次运行;自动抓取A处的物体放到B处。

图2 机械手动作过程
2 控制系统的硬件设计
包含控制器模块、步进电机及其驱动模块、键盘输入模块和显示屏输出模块。
本次设计基于任务的各种要求及现实情况,选择单片机系列作为控制器。本次设计选用AT89C52单片机。选用型号为28BYJ-48的步进电机,该步进电机驱动模块选用ULN2003.ULN2003具有电流增益高、工作电压高、温度范围宽、负载能力强等特点,经试验,能够适应本系统需求。
矩阵键盘和矩阵的键盘组的排布相似,被应用于单片机外部设备中。行列式键盘结构能够有效地提高单片机系统中I/O口的利用率。
本系统中以PS7219芯片作为显示器显示中间运行结果及状态等。
系统硬件电路图如图3所示。
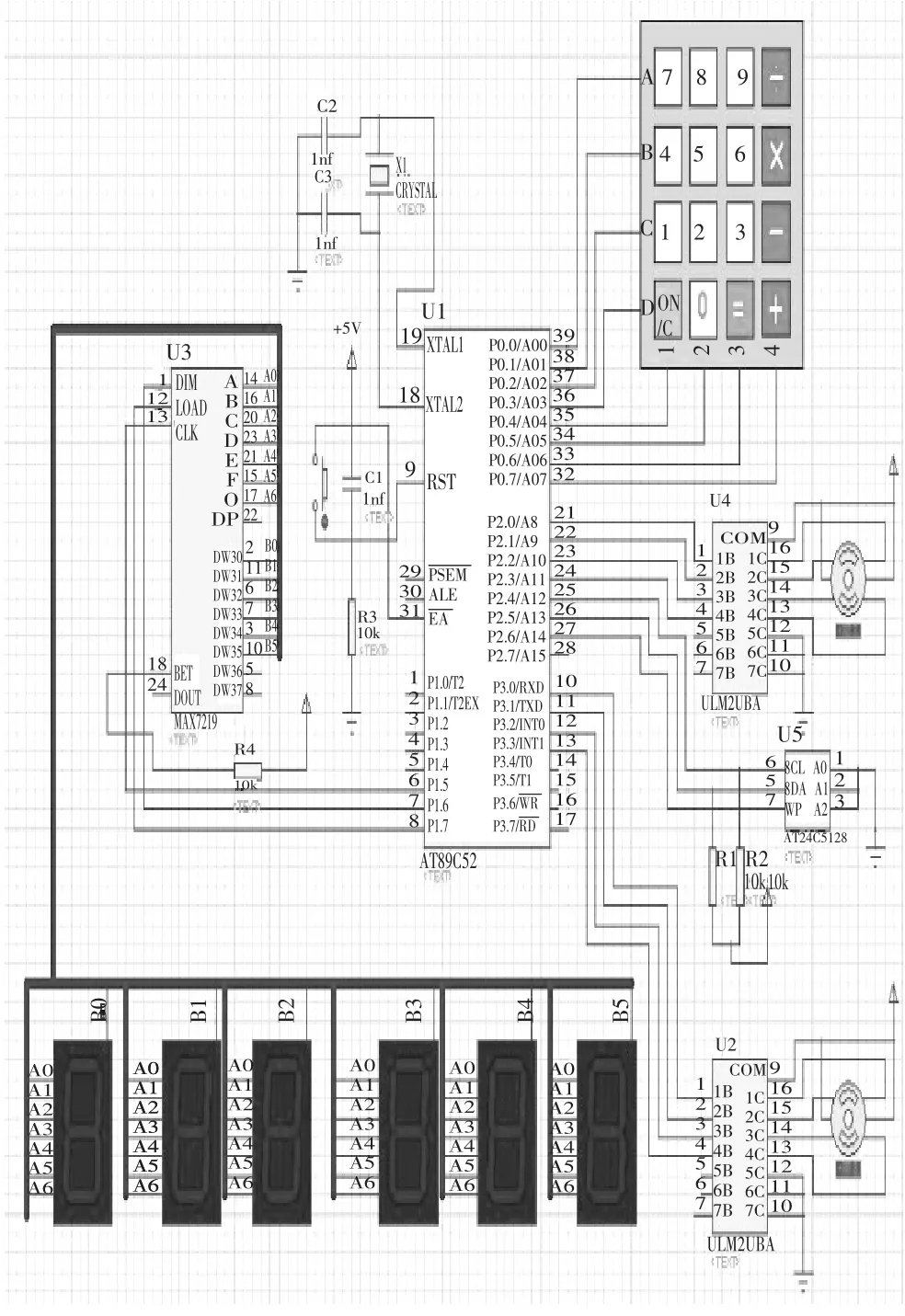
图3 机械手控制系统硬件电路图
3 控制系统的软件设计及仿真
3.1 软件设计
包含步进电机执行程序、键盘输入程序、显示屏程序、数码管显示程序和protues软件仿真。程序代码见附录。键盘流程图如图4所示。
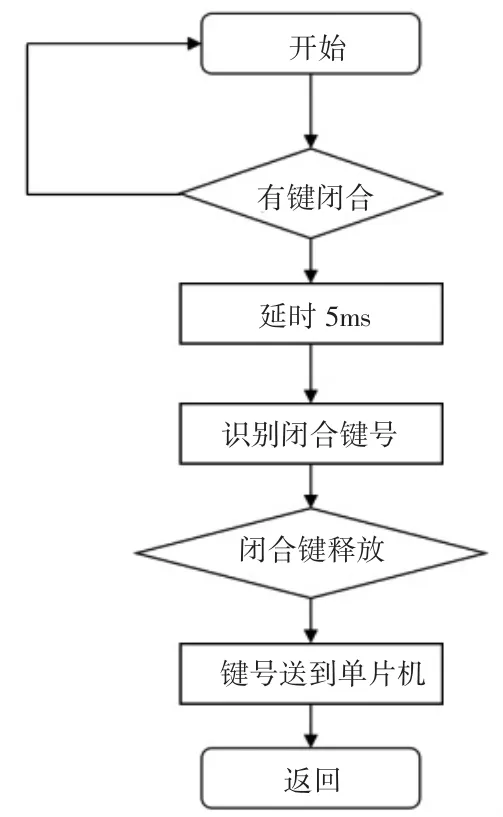
图4 键盘流程图
部分步进电机程序如下:
void main()
{
diola=0; //初值
P1=0;
while(1)
{ //大臂上升
LA=1;
delay(1);
LA=0;
LB=1;
delay(1);
LB=0;
LC=1;
delay(1);
LC=0;
LD=1;
delay(1);
LD=0; }
delay(1000);

//手臂伸出
3.2 软件仿真
系统软件部分的程序设计完成后,结合系统整体电路,经过Protel软件对程序进行编译,最后将程序加载到芯片中,用Proteus进行仿真。仿真的步骤如下所示:
建立工程项目文件,在菜单栏中选择project→New→uVision Project,建立名为c_egl的工程文件;建立源程序并添加到工程中;进入Protues仿真界面,也就是上有绘制单片机的硬件接线图;此时鼠标再次点击单片机,就会弹出一个对话框,在对话框中的Program File中添加Keil中生成的hex文件;添加之后,找到运行按钮,点击运行之后,即可看到仿真结果,如图5所示。
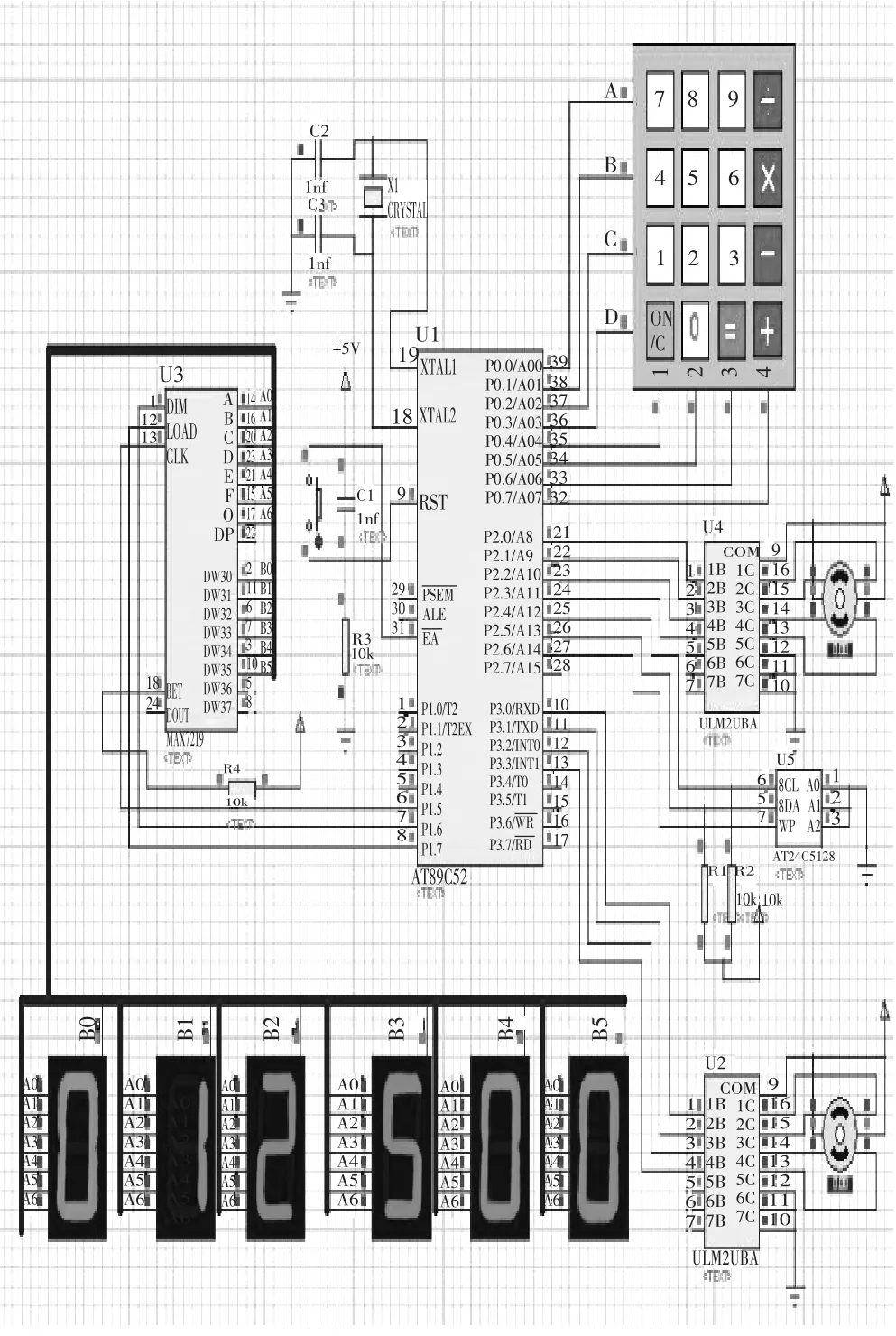
图5 仿真结果图
4 结束语
本次注塑机械手的设计主要围绕硬件设计和软件设计两大部分来进行。内容主要包括:机械手总体方案的确定,控制系统控制器的选择,执行元件步进电机及其驱动的选择,输入模块键盘的设计及输出模块显示屏的设计。
该机械手的体积较小、结构简单、价格低廉且响应速度快、定位精确,能够完成注塑工艺中工件夹取及转移等动作,简单可靠。作业的准确性和可靠性是机械手的工作特点,其在国民经济各领域有着非常广阔的发展前景。注塑成型工业的蓬勃发展,将带动更多的机械手被应用于上料、混合、自动装卸模具、回收废料等各个工序上,无一例外地,其发展方向的趋势即为智能化和节能化。本文可以为一些简单注塑机械手的控制系统的设计应用提供一定的借鉴。
[1]王建明.自动线与工业机械手技术[M].天津:天津大学出版社,2009.
[2]中国就业培训指导中心.机械手原理[M].北京:中央广播电视大学出版社,2004.
[3]陈 强.机械综合实训教程[M].杭州:浙江大学出版社,2012.
[4]邓星钟.机电传动控制[M].武汉:华中科技大学出版社,2001.
Design of Single Chip Microcomputer System for Injection Molding Machine Manipulator
WANG Rong-chao
(Changan University,Xi’an 710064,China)
This paper mainly focus on the injection molding machine manipulator control system to start discussion,the use of direct control structure,completed the hardware design and software design,including input and output modules,stepper motor control,microcontroller selection,select each drive module and so on.This paper describes the use of single-chip CPU as injection molding robot control system.This injection robot control system uses the corresponding circuit design.This paper describes the circuit design of the main control part of the dual-DOF manipulator by 28BYJ-48 for stepper motor actuators,stepper motor drive module using ULN2003 chip,the controller aspect and using AT89C52 reset circuit,crystal oscillator circuit design integration,keyboard input usingsimple matrix keyboard,display with digital display,the PS7219 chip driver,and finally through the whole hardware circuit simulation.The robot in ensuring its original performance under the premise of as much as possible to improve its characteristics that the performance and price ratio.And has a smaller size,simple structure and low price,and handsome appearance,the adjustment of the design to facilitate the convenience of the body close to the use of tools.
injection molding machine manipulator;robot control circuit design;microcontroller;stepper motor
TP241.2
A
1672-545X(2017)09-0023-03
2017-06-11
王荣朝(1990-),男,河南郑州人,硕士在读,研究方向为铣刨机的数字化控制系统。