连铸结晶器非正弦发生器的集成设计
2017-11-15刘大伟罗林明王国会
刘大伟 罗林明 王国会 金 昕
1.燕山大学机械工程学院,秦皇岛,0660042.燕山大学国家冷轧板带装备及工艺工程技术研究中心,秦皇岛,066004
连铸结晶器非正弦发生器的集成设计
刘大伟1,2罗林明2王国会2金 昕2
1.燕山大学机械工程学院,秦皇岛,0660042.燕山大学国家冷轧板带装备及工艺工程技术研究中心,秦皇岛,066004
在分析非正弦振动系统原理的基础上,提出了用减变速一体化齿轮代替原有二级发生器激发结晶器非正弦振动的方法;针对典型的具有匀速运动特征的非正弦波形,反求出减变速一体化齿轮的节曲线方程,进而推导出关键工艺参数的计算公式;结合某钢厂的生产要求,给出集成发生器的设计实例及工艺分析。非圆齿轮传动系统的集成设计不仅能达到良好的工艺效果,而且能很大程度地实现设备高效轻量化,具有应用和推广价值。
结晶器;非正弦振动;减变速一体化齿轮;节曲线逆向构建
0 引言
连铸机结晶器是钢液向钢坯转变的反应器,包含液化、凝固、摩擦、润滑等一系列复杂的物理变化,被誉为连铸机的“心脏”[1]。结晶器非正弦驱动系统是保证“心脏”正常高效工作的关键设备,面对高温辐射、蒸汽腐蚀等恶劣工况,设计低成本、高可靠性、高精度的结晶器驱动设备一直是国内外冶金行业追逐的目标。
目前主流的非正弦驱动装备为液压式,通过液压伺服控制实现液压缸驱动单元的非正弦振动,可在线实时调整振动工艺参数[2-3],但该系统复杂,投资、维护费用高昂,运行中存在偷停和双缸同步性差的缺陷[4]。以伺服电机变速驱动为代表的电动式非正弦振动系统近年来获得快速的发展,相对液压式非正弦振动,电动式非正弦振动系统简单,投资和维护成本有所降低,而且性能可靠[5-7],具有良好的发展前景。当前钢铁行业低迷的市场形势下,拥有更低成本的机械式非正弦驱动系统更加适应钢铁企业降本增效的迫切需求。机械非正弦驱动系统采用普通变频电机作为动力源,通过变速传动元件实现非正弦振动[8-10],其中,非圆齿轮凭借高可靠性、精确变速比和易实现动平衡等优点,成为机械式的核心元件;但对于多机多流的方坯连铸机,其结晶器驱动系统的有限布置空间,导致机械式驱动系统的安装和维护面临很大的难题。为此,本文提出了机械式非正弦驱动单元的集成设计方案,将传动空间减小50%,根据非正弦振动规律,给出集成单元的逆向设计方法,并通过仿真计算验证方案的可行性。
1 非正弦发生器的结构集成原理
1.1非圆齿轮激发结晶器非正弦振动的机构原理
连铸机结晶器的振动系统一般由驱动单元、板簧导向装置、缓冲装置和振动台组成。结晶器固定在振动台上,驱动单元通过导杆与振动台相连,当驱动单元运行时,振动台承载着结晶器,在板簧导向作用下,按一定的轨迹和一定的速度规律振动。
由非圆齿轮激发结晶器非正弦振动的驱动单元如图1所示,变频电机1通过减速变速箱2与偏心振动机构3相连,其中,减速变速箱2是形成结晶器非正弦振动的核心部件。

1.变频电机 2.减速变速箱 3.偏心机构图1 结晶器驱动单元简图Fig.1 Schematic diagram of mold drive unit
减速变速箱2由一对具有恒定减速比的圆锥齿轮和一对具有变速比的非圆齿轮组成,如图2所示,圆锥齿轮副布置在高速级,将电机的频率降到结晶器的工作频率,然后通过非圆齿轮副输出低频变转速,进而带动偏心机构实现非正弦振动规律。
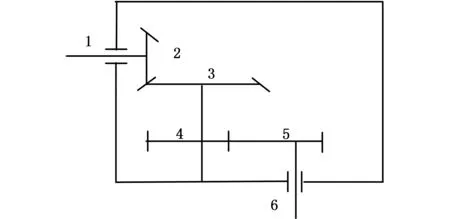
1.输入轴 2,3.圆锥齿轮 4,5.非圆齿轮 6.输出轴图2 减速变速箱结构简图Fig.2 Structural diagram of reduction gearbox
经过实践验证,图1中的非正弦驱动单元不仅工作可靠,投资维护成本低,而且波形稳定,控制简单,该产品具有很高的性价比。但结晶器驱动系统安装空间的限制,使得对于多流的连铸机,图1中的振动单元存在体积过大的问题,尤其对于旧式正弦驱动系统的改造,空间不足问题尤为突出,这不仅增大了改造难度,而且严重限制了该驱动单元的推广普及。针对此,本文基于结构和功能融合思想,提出了减速变速箱的集成设计方案。
1.2减速齿轮与变速齿轮的集成
减速变速箱集成的本质是图2中减速齿轮2、3和变速齿轮4、5的集成,也就是通过一对齿轮副实现原减速齿轮和变速齿轮串联机构的功能。理论上,当选择的非圆齿轮副中包含大、小非圆齿轮时,可以实现减速和变速集成的功能,但是由于封闭非圆齿轮的构建必须满足苛刻的几何条件,传统的非圆齿轮只能实现减速比和节曲线周期比相等的减变速集成传动规律,也就是说当减速比为ij时,低速非圆齿轮旋转一周,角速度变化的周期数必须为ij,这种限制无法适用于减速比和节曲线周期比不等的情况;而结晶器非正弦振动中,减速比约为4~6,非圆齿轮节曲线周期比为1,采用常规非圆齿轮无法实现本产品中的集成设计目标。
突破传统非圆齿轮中非圆与非圆的配合模式,基于非圆齿轮和面齿轮传动特点,将面齿轮原有的节圆改为非圆形节曲线,构建了圆齿轮与非圆面齿轮组成的减变速一体化齿轮副,如图3所示[11]。小圆柱齿轮1采用直齿渐开线齿轮,与原动机相连,非圆面齿轮2作为输出构件,与负载相连。齿轮安装时,两者回转轴线正交,小圆柱齿轮1的节圆柱面与非圆面齿轮2的节面相切。运行中,小圆柱齿轮的节圆柱面与非圆面齿轮的节曲线保持纯滚动,则减变速一体化齿轮的传动比

(1)
其中,φ1为圆柱齿轮的转角,φ2为非圆面齿轮的转角,小圆柱齿轮的节圆半径R为恒定值,非圆面齿轮的向径r(φ2)随φ2变化,所以当两轮转动时,能够实现变速比转动,由式(1)可得小圆柱齿轮的转角

(2)
1.小圆柱齿轮 2.非圆面齿轮图3 减变速一体化齿轮副Fig.3 Speed integration gears
令一个假想的圆柱齿轮与非圆面齿轮啮合传动,当假想圆柱齿轮旋转一周时,非圆面齿轮也刚好旋转一周,此时假想圆柱齿轮与非圆面齿轮的瞬时变速比为ib,根据式(2)可得此假想圆柱齿轮的半径
(3)
可将小圆柱齿轮与非圆面齿轮的传动比i分解为减速比(ij=Rb/R)与变速比(ib=r(φ2)/Rb)的乘积,即i=ijib,由此可见,小圆柱齿轮和非圆面齿轮组成的齿轮副可以完美地代替传统的减速齿轮副和非圆齿轮副组成的串联结构,非圆面齿轮副将减速功能和变速功能融合为一体,通过调节圆柱齿轮的分度圆半径R控制减速比,通过调节非圆面齿轮的节曲线向径r(φ2)控制变速比,减速和变速的设计相对独立,理论上可以实现任意减速和变速规律的集成。
2 集成发生器的设计及工艺参数
2.1振动波形含匀速特征的节曲线逆向构建
减变速一体化齿轮副由一个普通直齿小圆柱齿轮和与其共轭的非圆面齿轮组成,两者的回转轴线正交,如图4所示,直齿小圆柱齿轮绕Y1轴旋转,节曲线为螺旋升角不断变化的螺旋线,非圆面齿轮绕轴X2旋转,节曲线为一条平面非圆曲线。当圆柱齿轮转动时,两者的节曲线发生纯滚动。

图4 非圆面齿轮副啮合原理Fig.4 Meshing principle of non-circular gear
若已知传动比i(φ2),则可得到非圆面齿轮节曲线在极坐标上的方程r(φ2)=Ri(φ2)。将该方程转化到直角坐标系O2X2Y2Z2中,非圆面齿轮的节曲线方程为
(4)
在直角坐标系O1X1Y1Z1中,直齿圆柱齿轮的节曲线方程为
(5)
式中,r0为φ2=0时非圆面齿轮节曲线的向径。
由式(5)可知,圆柱齿轮节曲线由非圆面齿轮节曲线确定,在非圆面齿轮回转过程中,圆柱齿轮在每个回转周期内的节曲线形状可以各不相同。该特性就确保了只要非圆面齿轮节曲线封闭,小圆柱齿轮节圆不管选用什么尺寸,两个齿轮都能实现连续传动,所以减变速一体化齿轮的封闭条件相对于现有非圆齿轮得到极大的简化。
将减变速一体化齿轮用作结晶器非正弦振动的发生元件,代替图2中的圆锥齿轮副和非圆齿轮副。其中,非圆面齿轮作为从动轮与输出端相连,如图5所示,将偏心机构简化为曲柄滑块机构,其中,滑块代表结晶器振动台,曲柄与非圆面齿轮固定连接,φ2为非圆面齿轮的极角,与转角大小相等、方向相反,两者可以互相替代,图5所示为非圆面齿轮的极角φ2=0时刻。
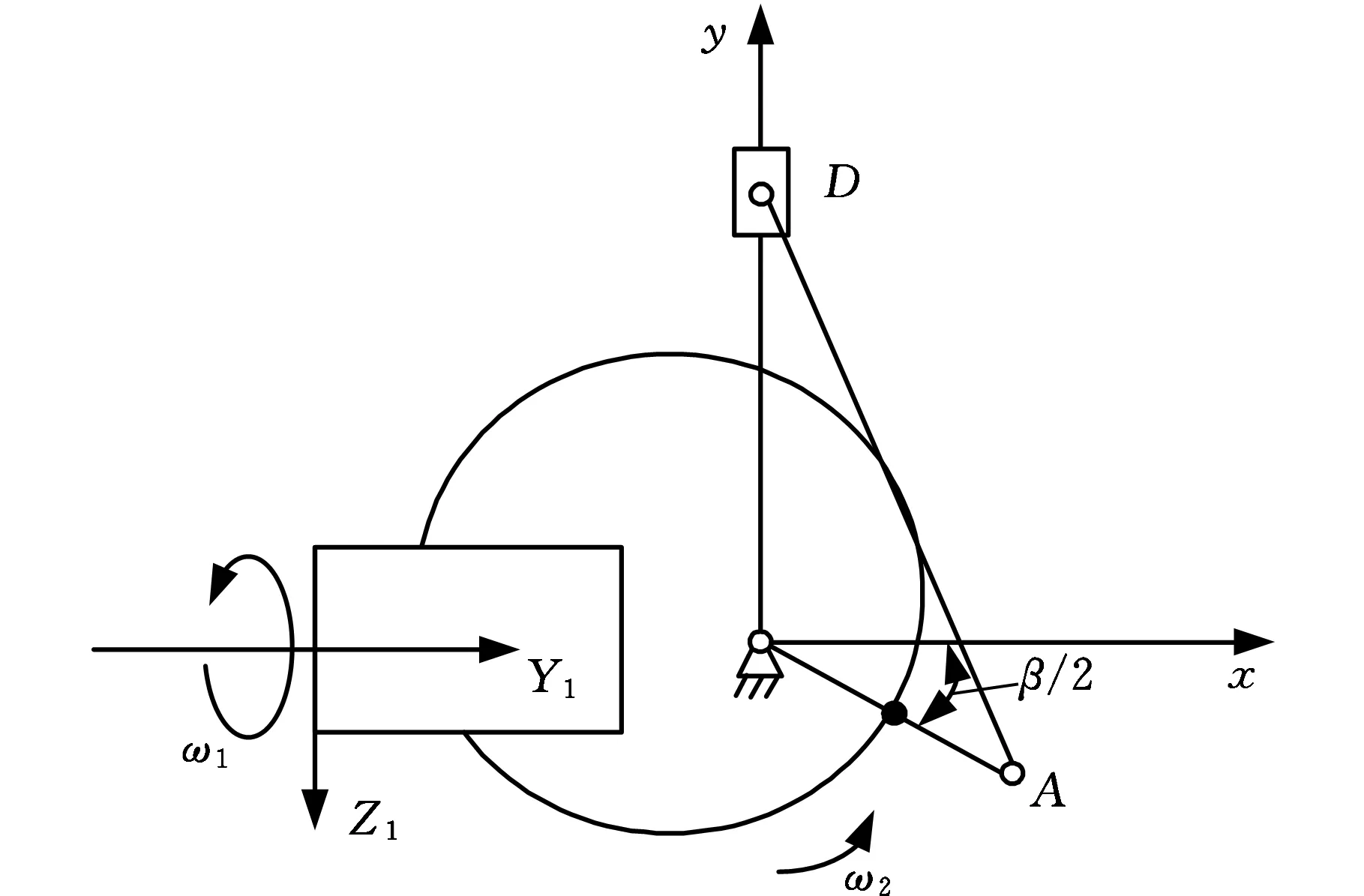
图5 非正弦振动装置简图Fig.5 Schematic diagram of non-sinusoidal oscillation
构建图6所示具有匀速段特征的非正弦波形,当φ2∈(0,β)对应结晶器匀速上升运动,且匀速运动的区间刚好在结晶器向上运动过程的区间,如图5所示。当非圆面齿轮的极角φ2=0时,曲柄与x轴的夹角为β/2,β最大范围为(0,π),结晶器的振幅h与曲柄OA的长度相等,一般为3~5 mm,h相对于连杆AD的长度很小,故结晶器振动台的位移

(6)

图6 非正弦振动波形Fig.6 Non-sinusoidal wave
对式(6)求导,并由式(1)可得结晶器的速度公式:
(7)
式中,vD为结晶器运动的速度,m/min;i为非圆面齿轮副的传动比;h为振幅,mm;f1为圆柱齿轮转动的频率,即电机频率,min-1。
结晶器向上运动的最大速度,即匀速段的速度
vmax=cv0=2cπfh/1000
其中,f为结晶器振动的频率,min-1;E点处结晶器速度等于拉速,此时非圆面齿轮的转角为φ2E;c表示非正弦振动的最大速度vmax与相同振幅和频率下正弦振动的最大速度v0的比值(简称最大速度比值),c∈(0,1)。令vD=vmax,再代入式(7),可得结晶器在匀速段时非圆面齿轮副的传动比:

(8)
因为非圆面齿轮副在匀速段运动时的传动比i1=ijib1,而f1/f为非圆面齿轮副的减速比ij,所以结晶器在匀速段时变速比

(9)
设结晶器在非匀速段运动时,非圆面齿轮副的变速比
(10)
β<φ2<2π
由节曲线光滑封闭的约束条件得
(11)

(12)
因此,非圆面齿轮副在非匀速段的传动比i2=ijib2。用MATLAB进行仿真计算时发现,当β>1.36时,速度函数明显不符合实际要求,因此,可以进一步精确地确定β的取值范围为(0,1.36)。
2.2非正弦振动工艺参数的计算
将传动比函数代入式(7)可以得到非正弦波形。 匀速段(0<φ2<β)波形函数
(13)
非匀速段(β<φ2<2π)波形函数
(14)
式中,vD1、vD2分别为结晶器在匀速段和非匀速段的速度,m/min;t1、t2分别为结晶器在匀速段和非匀速段运动的时间,s。
图6所示的非正弦速度曲线由两段速度曲线平滑过渡而成,加速度曲线连续,故设备运行平稳无冲击,匀速段可通过降低结晶器壁与铸坯的相对速度来减小铸坯与结晶器壁之间的摩擦力,通过参数c可控制最大正速度,通过β可控制匀速段时间,能够更加充分地发挥非正弦振动工艺的优势。
振动波形的工艺参数是制订不同钢种、拉速和断面等条件下结晶器运行模式的依据,其中,负滑动时间(结晶器向下的运动速度大于拉坯速度的持续时间)tN、负滑动超前量NSA和正滑动时间tp是目前现场制定振动工艺时主要关注的参数,当铸坯拉速为vc时,各工艺参数的表达式如下。
(1)负滑动时间
(15)
选择较短的负滑动时间可以有效地减小铸坯表面振痕深度,提高抗拉强度,提高铸坯表面质量,但tN过短对铸坯脱模及坯壳的拉裂愈合不利,tN过长又会加深铸痕深度,一般对于低碳钢,tN不小于0.1 s;而对于中碳钢,tN取值范围为0.07~0.10 s。
(2)正滑动时间
(16)
保护渣的消耗量与正滑动时间tp成正比,因此,tp取较大值会增加保护渣的消耗量,从而减小摩擦力,起到改善润滑的作用,一般tp取0.24~0.47 s。
(3)负滑动超前量NSA是在负滑动时间里结晶器相对于铸坯的位移量,它是负滑动的综合反映,其计算公式为

(17)
根据非正弦振动经验,NSA一般取2.5~5.0 mm,当NSA<2.5 mm时,铸坯容易黏结;NSA>5.0 mm时,容易造成铸坯振痕加深。
3 集成发生器的仿真试验
以某钢厂方坯连铸机为例,设计相应的振动发生器,连铸机的工作拉速为-2.5~-1.5 m/min,为使某中碳钢铸坯获得较好的表面质量,采用等负滑动时间工艺原则,同时兼顾负滑动超前量和正滑动时间,取2.5 mm≤NSA≤ 5 mm,tN=0.1 s,0.24 s ≤tp≤ 0.47 s。
3.1减变速一体化齿轮的设计
设非圆面齿轮的齿数为80,小圆柱齿轮的齿数为20,压力角为20°,模数为5 mm,小圆柱齿轮的节圆半径R为50 mm,则非圆面齿轮副的减速比ij为4,经大量计算分析后选定c=0.7,β=0.7,此时非圆面齿轮副的传动比
(18)
传动比曲线如图7所示。

图7 齿轮副的传动比曲线Fig.7 Transmission ratio curve of gears
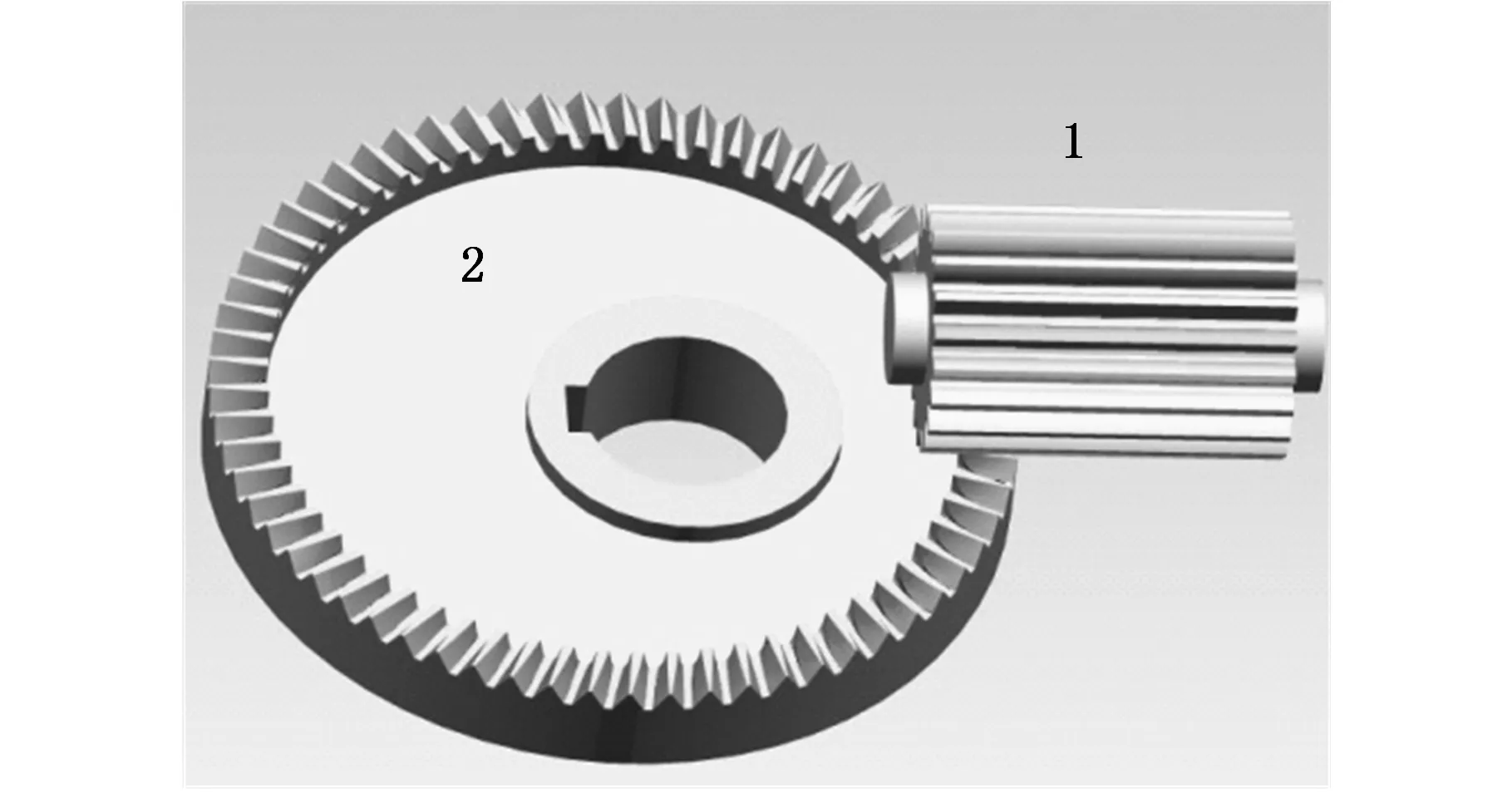
根据式(4)和式(18),设计并制造非圆面齿轮,如图8所示,以该齿轮副替代图1中减速齿轮和变速齿轮组成的二级轮系,即可实现具有匀速运动特征的非正弦振动规律。

1.非圆面齿轮 2.圆柱齿轮图8 减变速一体化齿轮实物图Fig.8 Physical picture of speed integration gear
3.2振动工艺分析
对于频率可在线调整的振动系统,多采用vc-f同步控制模型,更容易在拉速变化范围较大时获得最佳的工艺效果,控制模型一般为
f=C1+C2vc
(19)
式中,C1、C2为控制参数;vc为拉速,其值为负,频率随着|vc|的增大而减小。
经过计算取得一组较好的控制参数:C1=200,C2=24,当拉速改变时,振动工艺参数如图9所示。

图9 工艺参数随拉速变化曲线Fig.9 Process parameters change with pulling speed
负滑动时间从0.095 s延长到0.105 s,与工艺要求误差仅为±0.005 s,可以忽略不计,正滑动时间随着拉速提高而增大,有利于改善润滑效果,负滑动超前量也在合理的范围内,因此,该模型完全符合工艺要求,同时也证明了本文提出的结晶器发生单元集成设计方案的可行性。
4 结论
(1) 圆柱齿轮和非圆面齿轮的传动比规律可以分解成减速比和变速比两部分,分别对应原有二级发生器中的减速齿轮和变速齿轮,因此,能够有效代替二级发生器,激发结晶器实现非正弦振动,达到良好的工艺要求,同时减小50%以上的传动空间和驱动单元的质量。该设计原理可推广到其他含非圆齿轮的传动系统,能够最大限度地实现产品的高效轻量化设计。
(2) 对于非圆面齿轮,凡是具有周期性的传动比都可以逆向求解出封闭的节曲线,因此,应用该齿轮可以实现目前所有的非正弦振动规律,相对普通非圆齿轮必须满足苛刻的封闭条件,集成发生单元具有更强的工艺适应性。
(3)设计结晶器具有匀速运动特征的非圆面齿轮时,结晶器匀速运动区间β的取值范围为(0,1.36),选定β后,最大速度比值c的范围根据齿轮传动比大于0的准则来确定。
[1] 周超,任素波,张兴中. 新型结晶器基本参数研究及其内钢液行为仿真[J]. 中国机械工程,2016,27(11):1541-1545.
ZHOU Chao,REN Subo,ZHANG Xingzhong. Basic Parameters in a New Bloom Crystallizer and Simulation on Its Inner Liquid Steel Behavior[J]. China Mechanical Engineering,2016,27(11):1541-1545.
[2] 殷瑞钰. 新世纪以来中国炼钢-连铸的进步及命题[J]. 中国冶金,2014,24(8):1-9.
YIN Ruiyu. Progress and Propositions of Chinese Steelmaking and Continuous Casting Since the New Century[J]. China Metallurgy,2014,24(8):1-9.
[3] 梁子福,何博,张继强,等. 一种小方坯或小圆坯连铸机结晶器液压振动系统:中国,CN201410031089.8[P]. 2014-04-30.
LIANG Zifu,HE Bo,ZHANG Jiqiang,et al. A Crystalline or Small Round Billet Continuous Casting Machine for Hydraulic Vibration System:China,CN201410031089.8 [P]. 2014-04-30.
[4] 方涛,向忠辉,李宏磊. 连铸机结晶器液压振动常见故障分析与对策[J]. 机床与液压,2014,42(10):147.
FANG Tao,XIANG Zhonghui,LI Honglei. Failure Analysis and Countermeasures of Hydraulic Oscillation of Continuous Casting Mold[J]. Machine Tool and Hydraulics,2014,42(10):147.
[5] 方一鸣,李宫胤,李建雄,等. 伺服电机驱动连铸结晶器振动系统建模与分析[J]. 仪器仪表学报,2014,35(11):2616-2623.
FANG Yiming,LI Gongyin,LI Jianxiong,et al. Modeling and Analysis for Oscillation System of Continuous Casting Mold Driven by Servo Motor[J]. Chinese Journal of Scientific Instrument,2014,35(11):2616-2623.
[6] 田志恒,田立,周永辉,等. 结晶器非正弦振动系统的开发与应用[J]. 钢铁,2004,39(增):623-629.
TIAN Zhiheng,TIAN Li,ZHOU Yonghui,et al. Development and Application of Non-sinusoidal Oscillation System[J]. Iron and Steel,2004,39(S):623-629.
[7] YAO Yunfeng,LI Xiankui,FANG Yiming,et al. Study of Non-sinusoidal Oscillation of Continuous Casting Mold Driven by Servomotor[J]. Journal of Iron and Steel Research International,2008,15(1):558-562.
[8] 刘大伟,任廷志. 非圆齿轮驱动结晶器非正弦振动的研究[J]. 中国机械工程,2013,24(3):327-330.
LIU Dawei,REN Tingzhi. Research on Non-sinusoidal Oscillation of Mold Driven by Noncircular Gears[J]. China Mechanical Engineering,2013,24(3):327-330.
[9] 刘大伟,任廷志,金昕. 空间非圆齿轮双侧同步驱动板坯结晶器非正弦振动的研究[J]. 中国机械工程,2015,26(17):2325-2329.
LIU Dawei,REN Tingzhi,JIN Xin. Research on Non-sinusoidal Oscillation of Slab Mold Driven by Two Spatial Noncircular Gear Sets Synchronously[J]. China Mechanical Engineering,2015,26(17):2325-2329.
[10] ZHANG Xingzhong,ZHENG Xueran,LIU Qingguo,et al. Investigation and Application of Non-sinusoidal Oscillation Technique of Mold[J]. Journal of Iron and Steel Research International,2013,20(3):327-330.
[11] 刘大伟,任廷志,金昕. 减变速一体化齿轮啮合原理的研究[J]. 机械工程学报,2016,52(15):1-7.
LIU Dawei,REN Tingzhi,JIN Xin.Meshing Theory of Speed Integration Gear[J].Journal of Mechanical Engineering,2016,52(15):1-7.
IntegratedDesignofNon-sinusoidalGeneratorofContinuousCastingMold
LIU Dawei1,2LUO Linming2WANG Guohui2JIN Xin2
1.College of Mechanical Engineering, Yanshan University, Qinhuangdao ,Hebei, 066004 2.National Engineering Technology Research Center of Cold Rolling Strip Equipment and Technology,Yanshan University, Qinghuagndao,Hebei,066004
On the analyses of non-sinusoidal oscillator principles, a method was presented, where the mold was driven by a pair of speed integration gear instead of the two stage generator. According to the typical non-sinusoidal wave with constant speed, the inverse solution for the pitch curve equations of the speed integration gear was given, with the key technological parameters deduced. On the basis of steel mill production requirements, a design example of the integration generator and technology analysis were made. The integration design of the noncircular gear transmission system attains good processing results, and achieves high efficiency and light weight, which is of practical and popularization values.
mold;non-sinusoidal oscillation;speed integration gear;inverse solution for pitch curve
TH132
10.3969/j.issn.1004-132X.2017.21.016
2016-12-19
河北省自然科学基金资助项目(E2016203183,E2016203339)
(编辑陈勇)
刘大伟,男,1984年生。燕山大学机械工程学院副教授、博士。研究方向为非圆齿轮机构学及其应用。罗林明,男,1993年生。燕山大学机械工程学院硕士研究生。王国会,男,1991年生。燕山大学机械工程学院硕士研究生。金昕(通信作者),男,1975年生。燕山大学机械工程学院副教授、博士。E-mail:jinxin@ysu.edu.cn。