基于膜式液压放大的压电驱动器设计与试验
2017-11-15王建红许有熊
王建红 周 浩 许有熊 刘 娣
1.南京工程学院自动化学院,南京,2111672.南京工程学院机械工程学院,南京,211167
基于膜式液压放大的压电驱动器设计与试验
王建红1周 浩2许有熊1刘 娣1
1.南京工程学院自动化学院,南京,2111672.南京工程学院机械工程学院,南京,211167
为解决叠堆式压电陶瓷输出位移微小的问题,结合液压放大的优点,提出了一种基于膜式液压放大的压电驱动器,并对关键部件——橡胶膜片进行有限元静力学、模态等分析。分析结果表明:橡胶膜片具有足够的安全强度和良好的工作频宽。在此基础上,研制其实物样机,搭建其测控平台,并进行了试验研究。开环试验结果表明:在0~100 V电压控制下,所研制的压电驱动器输出位移范围为0~0.24 mm,放大比约为5;闭环控制试验结果表明:采用分段PID的驱动器控制效果优于采用常规PID的控制效果,稳态误差约为±0.5 μm。
液压放大;压电驱动器;分段PID;有限元
0 引言
气动比例阀是实现气动系统连续控制的关键元件[1],传统的气动比例阀采用高速电磁铁作为电-机械转换器,存在响应速度慢、控制精度较差等缺点,因而其在工业领域的应用受到限制[2]。压电驱动器因具有响应速度快、便于控制、工作频率范围宽等优点而得到了越来越广泛的应用,它也成为高速高精度气动比例阀研制中一种可选用的电-机械转换器[3]。但是由于压电驱动器输出位移微小,一般为几微米到几十微米,若直接用来控制阀芯的开度,它所能控制的阀的压力或流量也非常微小,尚达不到实际的工程应用需求,因此,需对压电驱动器输出的微位移进行有效的放大,即需要研究其放大机构,以满足实用的目的。
目前,压电驱动器常用的放大机构大多采用基本柔性铰链的杠杆式或三角式的放大机构[4],其运动再现性高、结构简单,但同时存在承受载荷小、易疲劳损坏等缺点,且为了得到较高的放大比,需要进行多级放大,导致放大机构体积较大,不利于气动阀小型化的发展要求,这限制了该类压电驱动器在气动阀中的应用。
基于液压传动的放大机构具有结构紧凑、承载能力大等特点[5],也是压电驱动器的一种常用放大机构。而活塞式的液压放大机构也存在易泄漏、易磨损、动态性能差、体积较大等缺点,不适合作为压电陶瓷微位移的放大机构,因此,本文提出一种基于膜式液压放大的压电驱动器,并进行了设计、关键部件有限元分析、控制试验等研究。
1 膜式液压放大的压电驱动器设计
1.1工作原理
本文设计的膜式液压放大的压电驱动器结构原理如图1所示,它主要由叠堆式压电陶瓷、大膜片阀芯、小膜片阀芯、液压油、复位弹簧、光栅传感器、输出轴等组成。其工作原理为:当压电陶瓷得电后,向上输出位移推动上膜片阀芯往上移动,从而推动大腔内的液压油挤向小腔内,以带动小膜片阀芯往上移动,即输出轴移动的位移为放大后的压电陶瓷位移。另外,由于压电陶瓷本身的迟滞、蠕变等非线性特性,再加上液压油可压缩性等影响,严重影响输出轴的输出位移精度,故输出轴输出位移经光栅传感器测量后形成闭环反馈,以提供位移的输出精度。当压电陶瓷断电时,在复位弹簧的作用下,大、小膜片阀芯跟随压电陶瓷回落。

图1 结构原理图Fig.1 The structure prinicple diagram
叠堆式压电陶瓷在有外负载F作用下的压电方程为[6]
(1)

所用膜片为硬芯波纹膜片,其有效面积可按下式计算[7]
(2)
(3)
式中,A1、A2分别为大、小膜片阀芯的有效面积;d1为小膜片阀芯直径;d2为小液压腔直径;d3为大膜片阀芯直径;d4为大液压腔直径。
根据液压放大原理,其放大比
k=A1/A2
(4)
所采用的设计尺寸为:d3=50 mm,d4=56 mm,d1=14 mm,d2=20 mm,其理论放大比k约为9.6。
结合式(1)~式(4),可得输出轴的总输出位移

(5)
按照图1所示的结构原理图,详细设计了图2a所示的结构图,加工后的实物样机如图2b所示。
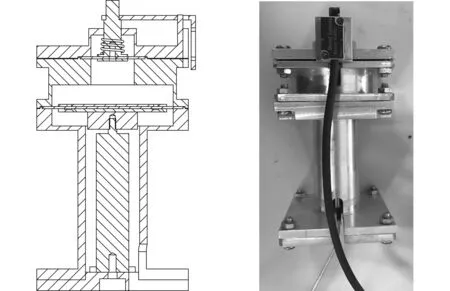
(a)结构图 (b) 实物样机图图2 结构图与实物样机图Fig.2 The structure diagram and prototype diagram
1.2橡胶膜片有限元分析
放大机构采用橡胶膜片阀芯代替传统的滑阀阀芯以防止液压油泄漏,但是该膜片阀芯的移动是利用橡胶材料的变形来实现的,且实际变形较为复杂,很难采用传统的材料力学理论确定其应力-应变规律。为了检验该橡胶膜片具有足够的拉伸强度以及较好的动态特性和工作频宽,需采用有限元方法对膜片阀芯进行分析。由于大膜片阀芯的变形小于小膜片阀芯的变形,即小膜片阀芯更易破坏,故只对小膜片阀芯进行有限元分析。
橡胶属于一种超弹性材料,其本构模型有Mooney-Rivlin模型、Neo-Hooken模型等。本文所用橡胶膜片在工作时,因其变形相对较小(应变小于150%),故采用两参数的Mooney-Rivlin模型,其表达式为[8]

(6)
式中,W为应变势能;I1、I2为变形张量;C10、C01为Mooney常数;J为变形后体积与变形前体积之比;d为材料不可压缩参数。
1.2.1小膜片阀芯有限元模型
将所设计的小膜片阀芯另存为.x_t的格式,导入ANSYS Workbench中,如图3所示。其中,小膜片阀芯由底芯、小橡胶膜片、输出阀芯组成,三者通过螺钉连接而成,小橡胶膜片外围直径d2为30 mm,在d5和d2环形之间被压缩固定在阀体上。在Workbench中,对其进行智能网格划分,其中,单元大小为0.5 mm,如图4所示。
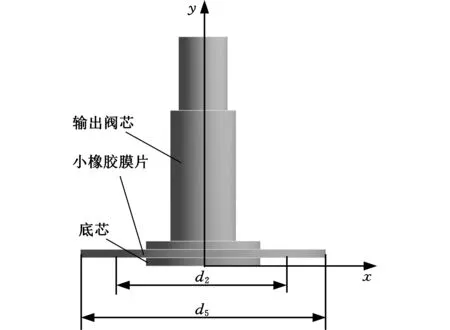
图3 小膜片阀芯结构图Fig.3 The small diaphragm spool structure diagram
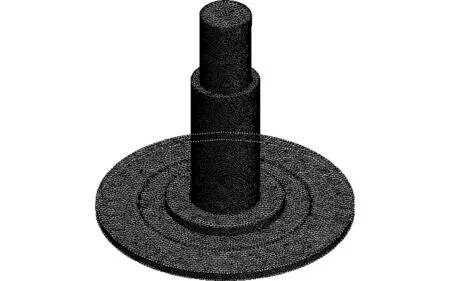
图4 小膜片阀芯网格图Fig.4 The small diaphragm spool mesh diagram
在底芯和小橡胶膜片、小橡胶膜片和输出阀芯之间设置“接触”;小橡胶膜片的d2与d5之间通过印记设置固定约束。
1.2.2静力学分析
由于所选用的压电陶瓷最大输出位移为60 μm(在1301 V控制电压下),按液压放大机构理论放大倍数10来计算,即所设计的压电驱动器理论最大输出位移为600 μm,因此,模拟在底芯处施加600 μm的位移载荷,以检验橡胶膜片是否有足够的安全强度,其位移变形和应力如图5所示。

(a)位移变形图 (b)应力图 图5 小橡胶膜片的位移变形与应力图Fig.5 The small rubber diaphram displacement deformation and stress diagram
从图5可以看出,小橡胶膜片的最大应力为0.87 MPa,根据文献[9],硅橡胶拉伸强度为2~5 MPa(未补强硫化)和4~10 MPa(补强硫化),小橡胶膜片的安全系数最低约2.3,有良好的安全强度。
1.2.3模态分析
采用有限元模态分析确定小膜片阀芯组件的振动模型及其相对应的固有频率等振动特性,以了解其动态特性。在上述静力学分析的基础上,得到小膜片阀芯组件前4阶的模态振型,如图6所示,相对应的固有频率见表1。

(a)1阶模态 (b)2阶模态

(c)3阶模态 (d)4阶模态图6 小膜片阀芯模态图Fig.6 The small diaphragm spool mode diagram

阶数固有频率(Hz)振型说明第1阶139.30沿x轴振动第2阶139.88沿z轴振动第3阶307.86沿y轴振动第4阶1152.10绕z轴转动
从表1可以看出,小膜片阀芯在工作位移方向(即沿y轴移动)的固有频率为307.86 Hz,有良好的工作频宽。
2 试验
2.1试验平台的搭建
在研制压电驱动器实物样机的基础上,采用NI测控系统搭建其试验平台,其原理如图7所示。其中,采用NI CRIO9024作为实时控制器,以保证试验平台的实时性。其试验系统如图8所示。

图7 试验平台硬件原理图Fig.7 The hardware schematic diagram of test platform
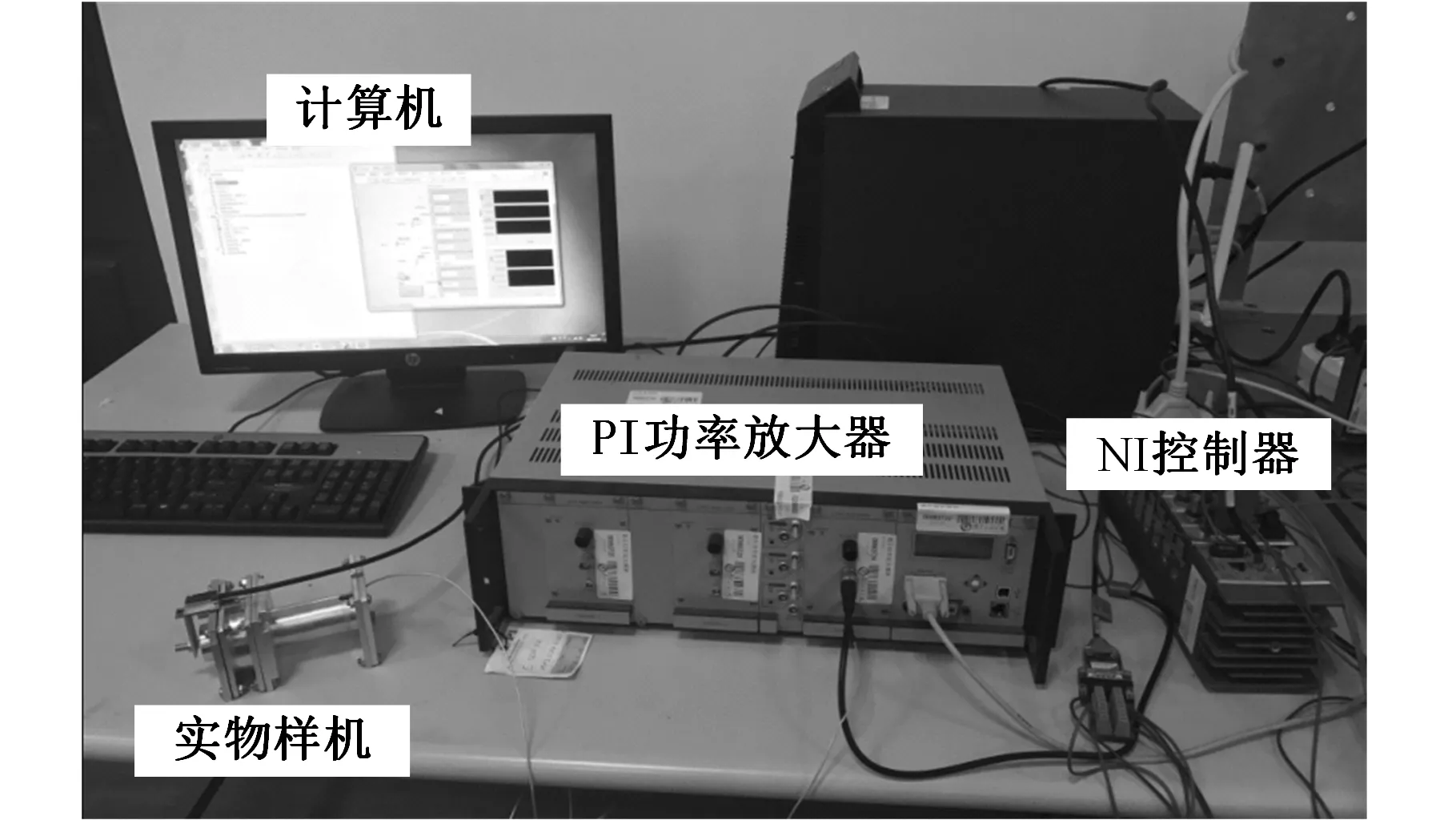
图8 试验系统Fig.8 The test system
2.2开环试验
控制电压从0开始以间隔10 V依次升高到100 V,再以间隔-10 V依次减小到0,分别检测压电陶瓷输出位移以及经液压放大后的驱动器末端输出位移,如图9所示。从图9可以看出:末端输出位移有较大的迟滞环,这是由于压电陶瓷本身的迟滞、蠕变,再加上液压本身的非线性等原因造成的,需要对其进行闭环控制研究加以消除;在100 V电压下,末端输出位移约0.241 mm,压电陶瓷输出位移约0.048 mm,放大比约为5,这与上述理论分析的近似放大比9.6有较大差距,原因如下:一方面,理论计算的放大比本身是一种近似计算,不能反映真实的放大比;另一方面,由于液压油的微量泄漏、空穴、压缩性等因素,再加上橡胶膜片的变形所造成的位移损失会导致放大比的降低,但是该位移值也已满足所研究压电阀的行程要求。

图9 位移-电压图Fig.9 The displacement-voltage diagram
在不同输入电压下,驱动器末端输出位移的动态响应过程如图10所示。从图10可以看出,末端输出位移有一定蠕变,需进行闭环控制以消除或降低影响。
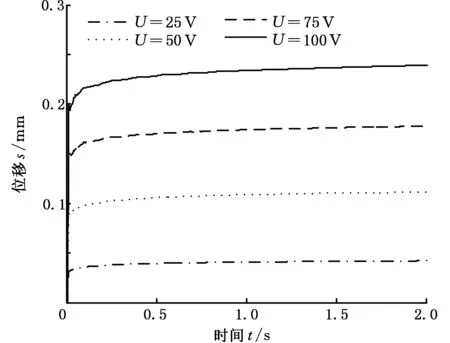
图10 开环动态响应图Fig.10 The open loop dynamic response diagram
2.3控制试验
以所研制的压电驱动器末端输出位移作为闭环反馈控制。若采用常规的PID控制器,在压电迟滞、蠕变、液压油压缩性等因素的影响下,存在鲁棒性差、无法保证位置控制精度等缺点[10-11],而模糊PID控制既具有PID控制的优点,又具有模糊控制适应性强的优点,它利用模糊规则在线推理出PID控制的3个参数,以消除压电迟滞、蠕变、液压油压缩性等对控制精度的影响,但是在线模糊推理会延长硬件系统的计算时间,从而影响控制系统的采样频率和实时性,达不到理想中的控制效果。结合模糊控制和PID控制的思想,采用分段PID控制方法,具体规则如下。
(1)当误差|e|较大时,比例调节系数KP应取较大值;微分调节系数KD应取较小值;积分调节系数KI也应取较小值,甚至等于0,以加快系统响应过程且避免过大超调。
(2)当|e|适中时,KP应取较小值,KI和KD取值适中,以避免系统产生较大值的超调以及在设定值附近产生振荡。
(3)当|e|较小时,KP应取较大值,KI应取较小值,KD取值适中,以使系统具有较好的稳态性,且避免在设定值附近产生振荡。
按常规PID控制参数整定放大得到KP1、KP2、KP3,KI1、KI2、KI3,KD1、KD2、KD3,并设置两个误差阈值e1和e2,其算法如下:
在图8所示的控制参数、设定值为0.15 mm条件下,分别对其进行分段PID控制和常规PID控制试验,如图11所示。从图11可以看出:采用常规PID控制具有一定的超调,约3.8 μm,其响应时间约0.047 s(达到设定值的90%,下同);而采用分段PID控制,能大大降低超调量(降至1 μm),且响应时间约0.036 s,两者的稳态误差均约为±0.5 μm。这说明采用分段PID控制能取得更好的控制效果。

图11 不同控制算法时的响应过程Fig.11 Response process of different control algorithms
4 结论
(1)本文提出了一种基于膜式液压放大的压电驱动器,并对关键部件小橡胶膜片进行了有限元静力学、模态等分析。分析结果表明:小橡胶膜片的强度安全系数约为2.3,有足够的安全强度;沿位移输出方向的模态振型频率约为307 Hz,有良好的工作频宽。
(2)对所研制的压电驱动器进行开环和闭环控制试验。开环试验结果表明:在0~100 V电压控制下,所研制的驱动器输出位移范围为0~0.24 mm,放大比约为5;闭环控制试验结果表明:采用分段PID控制的驱动器控制效果优于采用常规PID控制的控制效果,稳态误差约为±0.5 μm。
[1] SMC(中国)有限公司. 现代实用气动技术[M]. 3版.北京: 机械工业出版社, 2008:316.
SMC(China)Co., Ltd.,. Modern Practical Pneumatic Technology[M]. 3rd ed.Beijing: Mechanical Industry Press, 2008:316.
[2] 许有熊, 李小宁. 新型压电式气动PWM数字比例阀建模及仿真研究[J]. 系统仿真学报,2010,22(2):2296-2301.
XU Youxiong, LI Xiaoning. Modeling and Simulation Research of Novel Piezoelectric Type Pneumatic PWM Digital Proportional Valve[J]. Journal of System Simulation,2010,22(2):2296-2301.
[3] LIU Weichuan, CHENG Long, HOU Zengguang, et al. An Inversion-free Predictive Controller for Piezoelectric Actuators Based on a Dynamic Linearized Neural Network[J]. IEEE/ASME Transactions on Mechatronics,2016,21(1):214-226.
[4] 玲明祥,刘谦,曹军义,等.压电位移放大机构的力学解析模型及有限元分析[J].光学精密工程,2016,24(4):812-818.
LING Mingxiang, LIU Qian, CAO Junyi, et al. Analytical Model and Finite Element Analysis of Piezoelectric Displacement Amplification Mechanism[J]. Optics and Precision Engineering,2016,24(4):812-818.
[5] 俞军涛,焦宗夏,吴帅.基于液压微位移放大结构的新型压电陶瓷直接驱动阀设计与仿真[J]. 机械工程学报,2013,49(2):151-158.
YU Juntao, JIAO Zongxia, WU Shuai. Design and Simulation Study on New Servo Valve Direct Driven by Piezoelectric Actuator Using Hydraulic Amplification[J]. Journal of Mechanical Engineering,2013,49(2):151-158.
[6] 张福学, 王丽坤. 现代压电学[M].北京:科学出版社,2001:91.
ZHANG Fuxue, WANG Likun. Modern Piezoelectric[M]. Beijing: Science Press,2001:91.
[7] 郭万泉. 橡胶膜片有效面积的测定及其影响因素[J]. 航空制造技术,2003(10):53-56.
GUO Wanquan. Determination and the Influence Factors of the Effective Area of Rubber Film[J]. Aeronautical Manufacturing Technology,2003(10):53-56.
[8] KHALIL M, MAKREM A, MOHAMED T, et al. Singular Electrostatic Fields Near the Notch Vertex of a Mooney-Rivlin Hyper Elastic Body[J]. International Journal of Solids and Structures,2016,80:532-544.
[9] 成大先. 机械设计手册(常用机械工程材料分册)[M]. 北京:化学工业出版社,2017:367.
CHENG Daxian. Machine Design Handbook (Common Mechanical Engineering Materials Volume)[M]. Beijing: Chemical Industry Press,2017:367.
[10] 蔡成波, 崔玉国, 蔡永根, 等. 压电微动平台的改进PID控制[J]. 压电与声光,2015,38(3):441-444.
CAI Chengbo, CUI Yuguo, CAI Yonggen, et al. Improved PID Control of Piezoelectric Micro-positioning Stage[J]. Piezoelectric and Acoustooptics,2015,38(3):441-444.
[11] 魏燕定.压电驱动器的非线性模型及其精密定位控制研究[J]. 中国机械工程,2004,15(7):565-568.
WEI Yanding. Study on Non-linear Model of Piezoelectric Actuator and Accurate Positioning Control Strategy[J].China Mechanical Engineering,2004,15(7):565-568.
DesignandExperimentofPiezoelectricActuatorBasedonDiaphragmTypeHydraulicAmplification
WANG Jianhong1ZHOU Hao2XU Youxiong1LIU Di1
1.School of Automation, Nanjing Institute of Technology, Nanjing, 211167 2.School of Mechanical Engineering, Nanjing Institute of Technology, Nanjing, 211167
In order to solve the problems of the stack piezoelectric ceramic minute output displacements, which might not meet the practical applications, a piezoelectric actuator was proposed based on diaphragm type hydraulic amplification and the statics and modal analyses of the rubber diaphragm were analyzed by finite element analysis method. The analysis results show that the rubber diaphragm has sufficient safety strength and good working bandwidth. Then, the physical prototype of a piezoelectric actuator was developed and its control platform was built. Finally, the experimental research on the piezoelectric actuator was done. The open-loop experimental results show that the output displacement range is as 0~24 mm under the control voltage of 0~100 V and the actual amplification ratio is as 5. The closed-loop control experimental results show that the control effectiveness of the segmented PID is better than the conventional PID ,and the steady-state errors are about ±0.5 μm.
hydraulic amplification;piezoelectric actuator;segmented PID; finite element
TH137
10.3969/j.issn.1004-132X.2017.21.009
2016-05-23
国家自然科学基金资助项目(61503180);江苏省先进数控技术重点实验室开放基金资助项目(SYKJ201601);南京工程学院科研基金资助项目(CKJA201605)
(编辑陈勇)
王建红,女,1977年生。南京工程学院自动化学院讲师。主要研究方向为压电驱动与控制。E-mail:zdhxwjh@njit.edu.cn。周浩,男,1992年生。南京工程学院机械工程学院硕士研究生。许有熊,男,1980年生。南京工程学院自动化学院副教授、博士。刘娣,女,1983年生。南京工程学院自动化学院副教授、博士。