降阶控制器性能指标权系数设计方法*
2017-11-09刘文东李华滨包为民
刘文东,李华滨,包为民
(1 北京航天自动控制研究所,北京 100854; 2 北京宇航系统工程研究所,北京 100076; 3 中国航天科技集团公司,北京 100037)
降阶控制器性能指标权系数设计方法*
刘文东1,李华滨2,包为民3
(1 北京航天自动控制研究所,北京 100854; 2 北京宇航系统工程研究所,北京 100076; 3 中国航天科技集团公司,北京 100037)
为解决低阶反馈控制高阶系统的合理性问题,利用基于闭环系统时间尺度特性分析方法,分析了控制性能指标中权系数对六阶滚转驾驶仪系统时间尺度特性的影响,讨论了原系统二阶、四阶控制对反馈状态的选取与系统当前慢模态的差别,对不同控制的控制性能进行了仿真对比。结果表明:只有通过设计控制性能指标中的权系数,使得反馈状态变量完全包含当前系统慢模态时,对系统的降阶控制才能达到控制性能要求。
两时间尺度;LQR设计;降阶控制;权系数
0 引言
降阶控制在控制系统设计中有广泛的应用。对恰当的被控对象降阶模型设计的控制律同样能够满足期望的性能要求。之所以利用降阶控制,一方面是由于系统建模的局限性,设计者面对的被控对象模型阶数往往低于真实对象阶数;另一方面是由于原系统求解复杂,对系统降阶设计可以简化计算,满足特定任务需求。
广义上讲,几乎所有的系统都是多尺度系统[1]。对于多尺度系统中最典型的两尺度问题,可将原系统拆解为两个子系统分别求解。Shinar在拦截问题[2],Ardema在轨迹规划问题[3]上都利用了系统的两尺度特性,然而其对快慢变量的选取依靠的是经验。Kokotovic分析了线性系统的快慢模态分离方法[4],并证明了对慢模态设计LQR控制器[5]的性能指标,但其控制性能对系统参数变化敏感。
在古典控制方面,Nesline针对LQR降阶控制的稳定性问题提出了关于性能指标权系数矩阵的建议[6],但其并未对系统能否使用降阶控制这一前提进行验证。文中利用闭环尺度分块方法对文献[7]中六阶模型进行了尺度分析,调节尺度差μ观测系统降阶控制包含的控制量,并将其控制性能与二阶、四阶控制性能对比,得到了设计降阶控制所需包含的最少控制量及控制性能对指标权系数的要求。
1 两尺度数学模型
对于线性定常系统:
y=Cx
(1)
若通过反馈控制使得闭环系统具有两尺度特性,则可通过一系列变换将式(1)转化为下式的形式:

y=C1x1+C2x2
(2)
式中:μ为小于1的小量;x1、x2维度分别为n1×1和n2×1。进而可将其分解为两个快慢子系统近似。
慢子系统为:

ys=Coxs+Dous
(3)

(4)
快子系统为:

yf=C2xf
(5)
原系统的控制可用两个子系统的控制复合近似为:
uc=us+uf=Goxs+G2xf
(6)
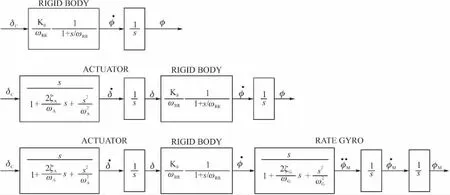
图1 系统框图
2 降阶控制器设计及性能指标分析
对于输出调节器问题,控制性能指标为:
(7)
由文献[5]知,两尺度系统复合控制为:

(8)


(9)
对于式(9)得到的降阶控制,不能依据LQR方法[8]得到其性能指标。文献[5]指出,通过解Riccati方程:
0=Pr(A-BF)+(A-BF)TPr+FTRF+CTC
(10)
3 降阶控制器设计
3.1 时间尺度分析
对系统的认识越深入,系统模型就越复杂。通常只能根据已知的系统模型设计控制器去控制真实的更高阶数的系统。而有时虽然已知系统的高阶模型,仍希望能够通过设计低阶而有效的控制器对其进行控制。
对于滚转驾驶仪,二阶、四阶、六阶模型如图1所示,控制性能指标为:
(11)
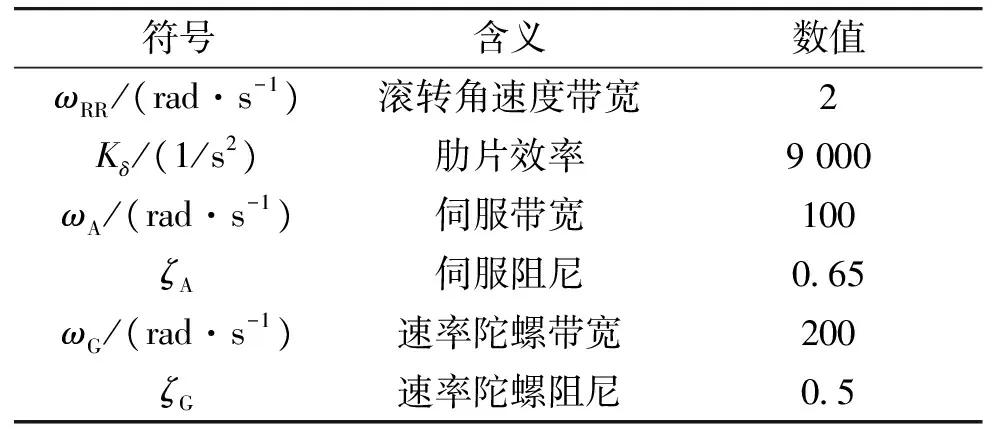
表1 模型参数
根据二阶、四阶模型分别设计的LQR最优反馈控制为:

(12)
式中:C21=3,C22=0.103,C41=3,C42=0.127,C43=8.81,C44=0.030 9。
文献[6]已经指出,若利用δ2c、δ4c控制六阶系统,则δCMX必须小于某一数值才能保证系统稳定。虽然此时稳定性得以保证,但使用二阶、四阶控制的合理性并未得到验证,即二阶、四阶控制的控制性能无法保证。
根据多尺度理论[9],高阶系统能够被低阶控制的前提即为系统呈现多时间尺度特性。考虑到六阶系统可以写成如下状态空间形式:
(13)
若令尺度差μ=0.3,依据闭环两尺度分块方法,随着δCMX以0.1°的间隔从0°到10°变化,整个系统呈现的时间尺度特性如表2所示。
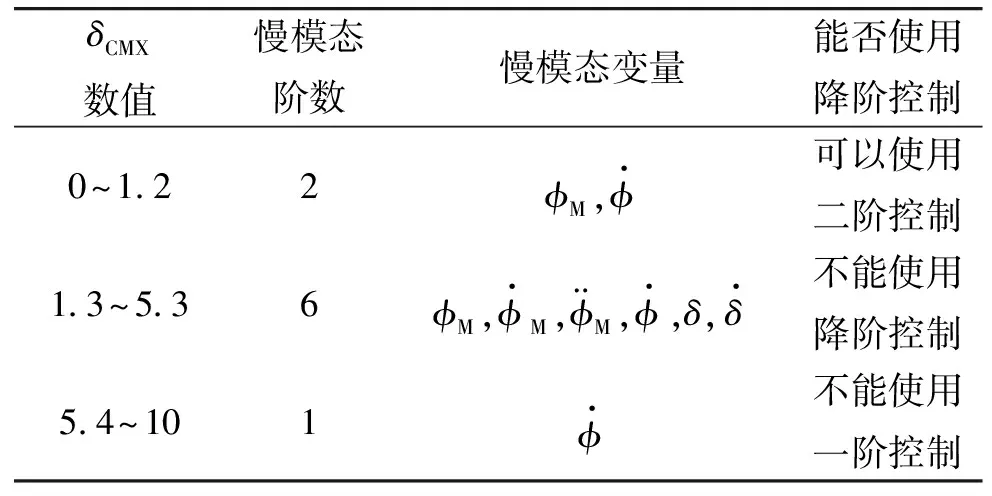
表2 系统时间尺度特性(μ=0.3)

由于尺度差μ直接影响系统快慢模态分块结果,而该参数的设置应结合具体系统实际情况。故令μ=0.8,重新观察系统时间尺度特性。
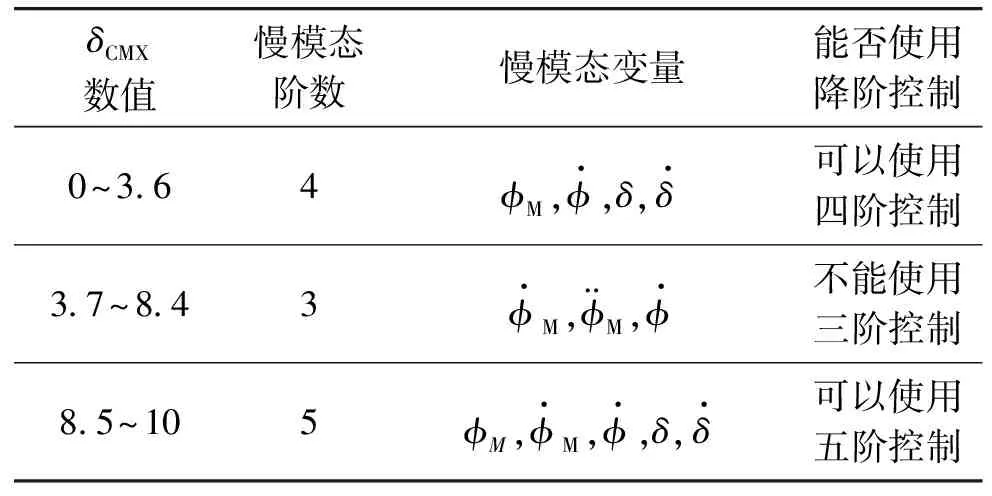
表3 系统时间尺度特性(μ=0.8)
综合表2、表3可见,尺度差μ越大,慢模态的最低阶数就越高,系统能够使用降阶控制的最低阶数就越高。同样也可以看到,系统的时间尺度特性随控制性能指标中的权系数变化,在针对不同控制系统设计降阶控制器时,有必要分析其合理的降阶系统阶数。
3.2 控制性能对比分析
在上节分析了系统时间特性的基础上,对二阶控制、四阶控制、基于闭环尺度特性的降阶控制及全状态反馈的控制性能进行对比分析。
由图2可见,当δCMX∈(0°,1.2°]时,系统的慢模态与二阶控制选取的状态相符,故初始段Jr位于J2下方,与J2几乎重合,降阶控制性能略优于二阶控制。由于此段四阶控制包含了所有慢模态及部分快模态,故其控制性能J4要优于J2、Jr,略低于全状态反馈J6。δCMX位于其他区间时,依据系统时间尺度特性,系统不再适合使用降阶控制,即使其目前控制性能指标未发散,也不可预知其发展趋势,设计δCMX时应避免其值落入该区域。
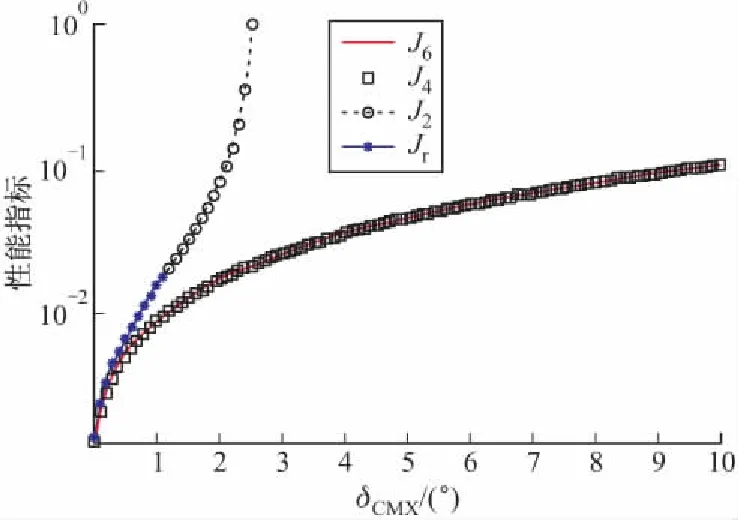
图2 降阶控制与二阶、四阶控制性能(μ=0.3)
由图3可见,初始段δCMX∈(0°,3.6°],系统呈现四阶慢模态特性,此时利用二阶控制相当于主观降低被控对象阶数,其控制性能J2迅速恶化。而四阶控制选取的状态与慢模态相符,故初始段J4与Jr接近。对于中间段δCMX∈[3.7°,8.4°]由于不能使用降阶控制,该段不予讨论。对于末端δCMX∈[8.5°,10°],降阶控制无论阶数或者控制性能都更接近全状态反馈,然而使用降阶控制的目的就是为了简化计算,末端对系统的简化不大,故选取权系数δCMX时也应避免选取在该段。

图3 降阶控制与二阶、四阶控制性能(μ=0.8)
综合图2、图3可知,若通过选取δCMX数值,使反馈的控制量已经包含当前系统全部慢模态,则其控制性能能够得以保证;若反馈的控制量只包含当前系统部分慢模态,则该控制器设计存在不合理性,其控制效果无法预知。
4 结论
对于特定的控制系统,一旦确定了尺度差μ,即可分析系统控制性能指标中权系数对系统时间尺度特性的影响,由此可以确定适合该系统的低阶反馈状态变量,只有包含全部慢模态的反馈控制才能够保证系统控制性能,在此基础上,可根据权系数与系统开环剪切频率的关系调整权系数保证系统的稳定性,进而得到恰当的低阶控制器。
[1] WEINAN E.Principles of Multiscale Modeling [M].北京:科学出版社,2012:1-5.
[2] SHINAR J,FARBER N.Horizontal Variable Speed Interception Game Solved by Forced Singular Perturbation Technique [J].Journal of Optimization Theory and Applications,1984,42(4):630-636.
[3] ARDEMA M D,RAJAN N.Separation of time scales in aircraft trajectory optimization [J].Jounal of Guidance,Control,and Dynamics,1985; 18(2):275-278.
[4] KOKOTOVIC P V,HADDAD A H.Controllability and time-optimal control of systems with slow and fast modes [J].IEEE Transactions on Automatic Control,1975,20(1):111-113.
[5] CHOW J,KOKOTOVIC P.A decomposition of near-optimum regulators for systems with slow and fast Modes [J].IEEE Transactions on Automatic Control,1976,21(5):701-705.
[6] NESLINE F W,ZARCHAN P.Why Modern Controllers Can Go Unstable in Practice [J].Journal of Guidance,Control,and Dynamics,1984,7(4):495-550.
[7] NESLINE F W,ZARCHAN P.A classical look at modern control for missile autopilot design [C]∥1982 Guidance and Control Conference.Reston:ARC AIAA,1982:90-104.
[8] 胡寿松,王执铨,胡维礼.最优控制理论与系统 [M].北京:科学出版社,2005:165-169.
[9] RAMNATH R V.Multiple Scales Theory and Aerospace Applications [M].Reston:American Institute of Aeronautics and Astronautics,2010:61-76.
DesignofReducedOrderControllerPerformanceIndexWeights
LIU Wendong1,LI Huabin2,BAO Weimin3
(1 Beijing Aerospace Automatic Control Institute,Beijing 100854,China; 2 Beijing Institute of Astronautical Systems Engineering,Beijing 100076,China; 3 China Aerospace Science and Technology Corporation,Beijing 100037,China)
To solve rationality problem using low order feedback to control high order system,a method of system decomposing based on closed-loop time scale characteristic was used.The influence of performance index weights on sixth order roll autopilot system characteristic was analyzed.The differences of feedback state choosing between second order,fourth order and current system reduced order were discussed,and the performances were simulated and compared respectively.The results show that:Only if the feedback states contain all slow modes through design of performance index weights,the reduced control can achieve the performance requirement.
two-scale system; LQR design; reduced control; weights
10.15892/j.cnki.djzdxb.2017.02.003
2016-05-30
国家自然科学基金青年基金(61403355)资助
刘文东(1987-),男,辽宁大连人,博士研究生,研究方向:两尺度系统、飞行控制。
O232
A