基于Handyscan扫描仪的汽车底护板检测试验研究
2017-11-07赵玉娟王红平青格勒梁嵬
赵玉娟,王红平,青格勒,梁嵬
(长春理工大学机电工程学院,吉林长春 130022)
基于Handyscan扫描仪的汽车底护板检测试验研究
赵玉娟,王红平,青格勒,梁嵬
(长春理工大学机电工程学院,吉林长春 130022)
利用Handyscan扫描仪对某型号汽车底护板进行检测,得到真实的产品信息。通过网格剖分算法改进现有软件的网格处理效果,并通过点云数据的逆向重构及时反馈该型号汽车底护板的数据信息,建立扫描数据与原始数模的偏差对比。通过证明检测数据精度完成某型号汽车底护板检测试验的建立。
Handyscan扫描仪;网格剖分算法;逆向重构;偏差对比
0 引言
汽车底护板是一种汽车防护装置,不仅起到了保护发动机作用,还起到了隔音降噪功能。汽车底护板具体外形及尺寸是根据各种不同车型定身设计,即使同款车型,也会因使用者的需求而千差万别。目前在汽车制造厂最常采用的是三坐标测量法,三坐标测量需要对汽车底护板进行打点检测,虽然在一定程度上得到汽车底护板相关信息,但是却不能系统地检测汽车底护板零件边及型面等是否合格。为了实现更高效、更全面的检测,出现了基于机器视觉的测量技术。基于机器视觉的检测技术虽然能够准确、全方位地检测汽车底护板,但是此检测技术成本高,需要专门的技术人员进行操作[1]。Handyscan3D扫描仪是一款监测分析精度很高的设备,能够方便、快捷地得到汽车底护板的相关数据信息,同时与其他激光扫描仪相比,Handyscan3D检测分析精度更高,可以简化大量零件的扫描任务[2]。
针对某厂商某型号的汽车底护板,采用无臂手持式3D扫描仪(Handyscan3D)设备,将该汽车底护板的整体点云部分扫描出来,并和原始数模数据进行比较,实现了该汽车底护板
的检测。
1 检测实验标准的建立
1.1 实验温度标准
检测环境直接影响汽车底护板检测试验的准确性,针对所测量的汽车底护板,结合扫描仪Handyscan3D的正常测量环境范围,底护板检测试验环境应保持在一恒定的范围内。根据检测设备及检测环境条件制定一稳定的环境标准,如表1所示。

表1 检测环境温度标准
1.2 数据标准
为使检测结果标准化,故建议数据标准。如图1所示为厂商提供的该底护板原始设计数模,并以此为数据标准进行数据偏差对比,可以使偏差结果标准化。

图1 底护板标准数模
1.3 检测精度要求
汽车底护板作为底盘外挂件,其安装孔的尺寸精度极其重要。因此以安装孔的定位尺寸作为检测试验精度标准,汽车底护板检测精度要求如表2所示。

表2 底护板检测精度要求(安装孔至中心线距离)
2 汽车底护板的检测
2.1 汽车底护板表面光点布局
对底护板进行光点布局是底护板检测试验第一步,直接影响检测试验的空间坐标系的建立。对于黑色板材的汽车底护板,必须进行贴光点才能识别建立空间坐标模型,贴光点有助于扫描仪精确地采集被测零件的数据并计算其空间坐标系数据,光点的布局以点位相互之间的距离不小于5 mm为标准,均匀无规则地贴在整个底护板被测面上[3]。
2.2 Handyscan3D扫描仪校准
利用Handyscan3D扫描仪对汽车底护板进行扫描前,必须对其校准。校准的目的是对扫描仪进行校准及对扫描头进行优化标定,保证扫描数据的准确性。
2.3 汽车底护板的扫描检测
手持Handyscan3D扫描仪对汽车底护板进行扫描时,扫描仪与汽车底护板的被测面距离不宜太远或太近。太远或太近都会影响数据采集效果,产生扫描误差。
3 汽车底护板数据处理分析
3.1 汽车底护板数据预处理
由于扫描获取方法自身的合理性、三维激光扫描仪的精度及调试、仪器扫描范围的局限性、坐标系的定位准确性、扫描物件的表面光洁度、测量数据的部分丢失、扫描成像的多视图问题,造成三维激光扫描系统采集的汽车底护板点云数据必然含有杂点。利用Studio软件很难进行光顺处理,因此采用人工交互检查方法,自行剔除明显跳点。图2为原始点云数据,图3为处理后的点云数据。
图2 底护板原始点云数据

图3 处理后的底护板点云数据
3.2 汽车底护板数据网格建立及划分
在预处理的点云数据基础上进行底护板网格建立,通过对点云数据特征识别建立网格曲面,利用逼近方式进行网格建立,使网格曲面靠近原始离散点云模型,达到优化反映射的目的[4]。对刚生成的面片逐次进行映射。离散面片边界数据,将其投影到新建的参数平面上,如图4所示。
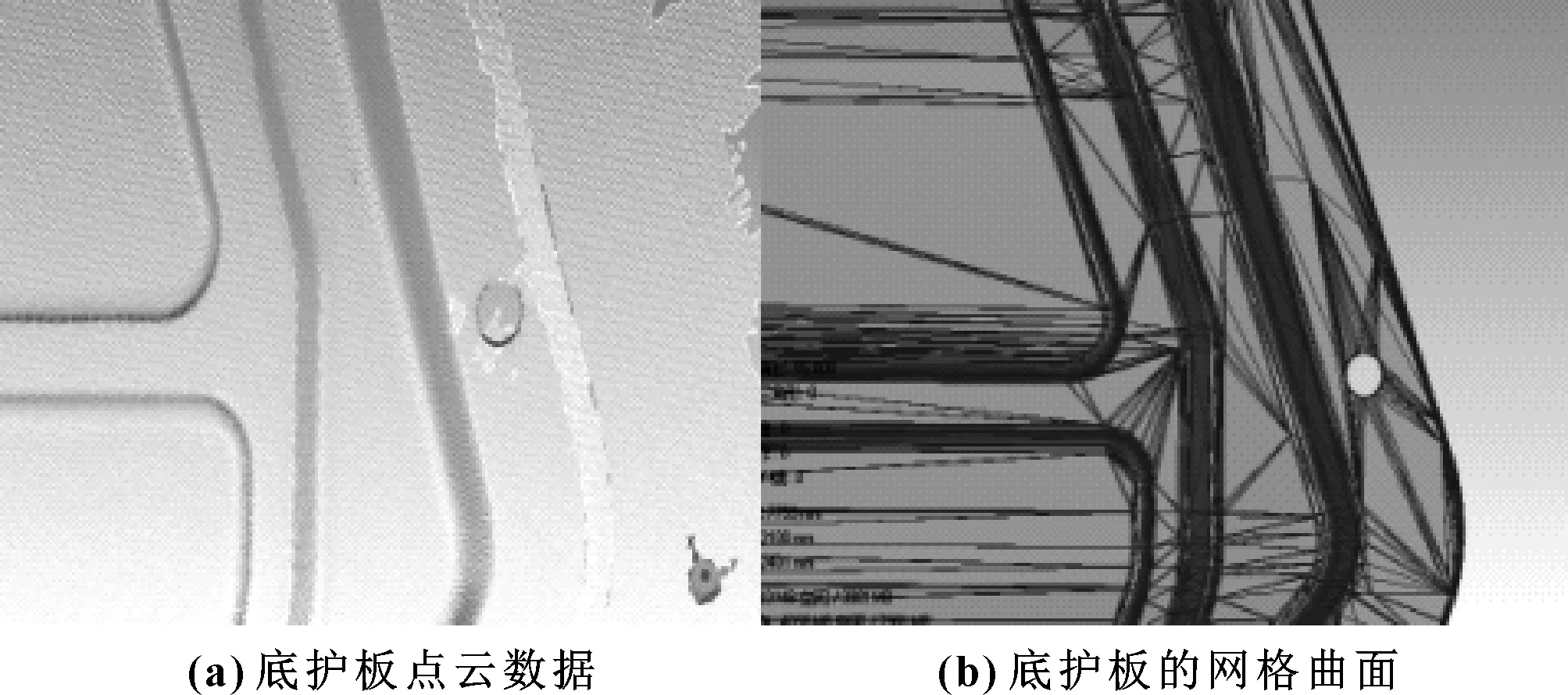
图4 底护板网格建立
新建立的网格面由于基于离散点云数据,故网格划分大而且不合理,需要对新网格面采用均化网格进行网格划分。通过对网格动态空间索引组织的网格曲面数据的拓扑结构进行融合,根据拓扑结构实现高效查询网格面片,按照曲面曲率对领域内网格面片进行分簇,采用顶点聚类进行三角面片划分,使得网格均匀分布在底护板数据面上。但是均化网格数量庞大,且并不针对底护板的特征进行合理分布。为使网格依据特征划分,需要进行底护板特征识别,如图5所示。通过特征识别进行网格优化,得到图6所示的网格划分,整个网格根据底护板特征划分,无特征区域分配较少网格,而特征区域分配众多细小网格,已达到完全表达特征处的目的。
由于建立网格没有整体性,且有错误拓扑发生,优化底护板网格整体并不完善,需要对错误网格进行修复,建立拓扑关系。通过Studio软件自行运算处理得到的网格面片发生严重畸变形,如图7所示,且出现新的错误,不能很好消除网格钉状物,故针对网格处理提出改进算法。

图5 底护板特征识别

图7 网格畸变
为保证最终网格质量,尽量避免网格生成反映射及映射引起的畸变,借助STL标准模板库,运用Delaunay三角剖分算法,就点边信息重新定义其数据结构,创建Point Status类来描述网格拓扑关系。采用CGAL中的数据结构(Point、Vertex_handle)创建的Point Status类为:
Class Point Status
{
Private:
Point P;
itr_EPoint;
Segment S;//
float m_fLen;
Std:multimap
Public:
bool b_fixed;//表示点P是否已成为固定点
int i_num_T1;//表示现阶段未完成拓扑的边的数量值
int i_num_T2;//表示现阶段已完成拓扑的边的数量值
std::multimap
float m_fMaxLength;//表示现阶段各边中最长边的长度值
float m_fMinLength;//表示现阶段各边中最短边的长度值
//点状态初始化函数
PointInitialization()
EdgeTopoStructured(Point p,Segment s);//该函数的功能为:将边s加入m_T1,即曲面M,同时修改关于端点P的拓扑信息,与映射map_Edge_Point中边进行长度对比,加入适当映射位置,刷新m_fMaxLength、m_fMinLength来完成未拓扑边数加1操作。
EdgeTopoCompletion();//该函数的功能为:将s加入m_T2,同时修改关于端点P的拓扑信息,完成拓扑边数加1操作;
FixedPointJudgement();//判断关于点P各边完成拓扑情况,固定点是否为点P;
//下面两个函数修改未完成拓扑端点的拓扑信息,处理出现静态孔洞情况;
void Remove_t1(Segment s);
void Remove_t2();
~PointStatus();
};
通过运算,得到良好网格面如图8所示,且网格错误也相应减少。

图8 改进算法处理网格示意图
以此网格面为基础进行底护板逆向构型,通过逼近方式构建数据面,以实验精度建立阈值,以此阈值进行曲面拟合,得到如图9所示底护板数据。

图9 底护板逆向数据模型
3.3 汽车底护板数据分析
根据逆向数据,对比厂商提供的数据标准模板,进行偏差对比,得到表3,与厂商检测精度要求对比可知,检测精度在允许误差范围内。
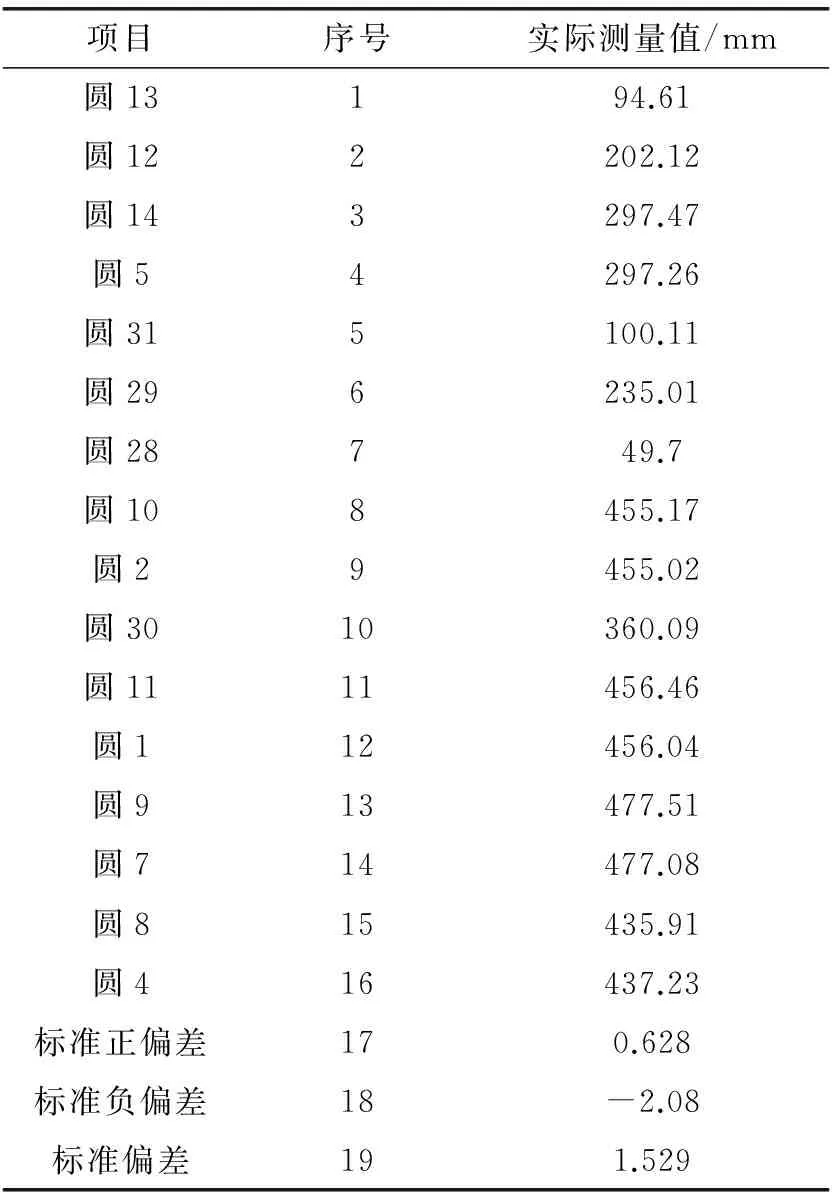
表3 检测数据表
4 结论
为快捷高效地检测底护板的产品数据信息,建立基于Handyscan扫描仪的检测试验,并根据底护板的材料性能、环境稳定制定实验标准及精度要求。通过扫描检测,并通过运用Delaunay三角剖分算法改进现有算法,避免底护板网格处理中的畸变错误,得到真实高精度的产品信息,以产品精度作为阈值重构产品数据,建立数据与产品设计原始数模的偏差对比,通过证明检测数据精度来完成底护板检测试验建立。
[1]王植槐.汽车制造检测技术[M].北京:北京理工大学出版社,2000.
[2]张伟,赖喜德,宋威,等.基于激光扫描的离心泵闭式叶轮反求技术[J].热能动力工程,2014,29(5):539-543.
ZHANG W,LAI X D,SONG W,et al.Technology for Seeking Solutions Reversely to the Closed Impellers of a Certrifugal Pump Based on Waser Scanning[J].Journal of Engineering for Thermal Engergy & Power,2014,29(5):539-543.
[3]任向东.叶轮逆向检测技术[J].测控技术,2013,32(S1):12-14.
[4]王永辉.基于非接触测量的汽车零件品质分析[J].机电工程技术,2006,35(1):36-39.
WANG Y H.Application of Quality Analysis Based on Non-Contact Measurement to Auto Parts[J].Mechanical & Electrical Engineering Technology,2006,35(1):36-39.
ExperimentalStudyonInspectionofAutomobileBottomShieldBasedonHandyscanScanner
ZHAO Yujuan, WANG Hongping, QING Gele,LIANG Wei
(School of Mechanical and Electrical Engineering, Changchun University of Science and Technology, Changchun Jilin 130022,China)
Handyscan scanner was used to detect an automobile bottom shield and real product information was gotten.The mesh processing algorithm was used to improve the grid processing effect of the existing software, and the data of the bottom shield were obtained by the reverse reconstruction of the point cloud data.The deviation between the scanning data and the original digital model was compared.By confirming the accuracy of the test data, the inspection test of an automobile bottom shield was established.
Handyscan scanner; Meshing algorithm; Reverse reconstruction; Deviation comparison
2017-05-31
赵玉娟(1991—),女,硕士研究生,主要从事机电系统控制技术研究、在线监测理论与技术研究。E-mail:zhaoyujuan4963@163.com。
王红平,E-mail:m15590592489@163.com。
10.19466/j.cnki.1674-1986.2017.10.016
TB22
B
1674-1986(2017)10-067-05
