手制动预紧力自动调节控制系统研究
2017-11-07宁忠麟覃光许宋朋举吴亚菲
宁忠麟,覃光许,宋朋举,吴亚菲
(1.上汽通用五菱汽车股份有限公司技术中心,广西柳州 545007;2.武汉理工大学汽车工程学院,湖北武汉 430070)
手制动预紧力自动调节控制系统研究
宁忠麟1,覃光许1,宋朋举2,吴亚菲2
(1.上汽通用五菱汽车股份有限公司技术中心,广西柳州 545007;2.武汉理工大学汽车工程学院,湖北武汉 430070)
针对汽车总装线上手制动系统人工装调工位所存在的耗时长、劳动强度大、调节精度无法保证的问题,通过深入研究预紧力调节方式、调节流程,开发了一套手制动预紧力自动调节控制系统。以试验数据为基础,分析影响系统精度的因素;基于LabVIEW平台实现预紧力自动调节控制、检验、测试结果共享及查询等功能。
手制动预紧力;调节控制;采集卡;电磁继电器;LabVIEW
0 引言
汽车驻车制动可靠性关系到人员的安全问题,驻车制动的人工调节不仅耗时、劳动强度大,而且还会因操作人员的主观意识及操作不规范而无法保证调节精度。为此,研发自动调节控制手制动预紧力的装调系统显得尤其重要。
1 调节控制系统组成及功能
系统主要由卡紧制动手柄的夹具模块、驱动手柄圆周运动的电机驱动模块、自动调节控制软件及启停等信号指示模块组成。其中自动调节控制软件及启停等信号指示模块的核心硬件包括以下几种:
1.1 电磁继电器
电磁继电器是一种电子控制器件,通常应用于自动控制电路中,实现用较小的电流、较低的电压去控制较大电流、较高电压的一种“自动开关”,在电路中起着自动调节、安全保护、转换电路等作用,相比开关采集卡而言价格更低、适应性更强。
1.2 信号采集卡
信号采集卡主要用来采集不同信号以便做出相应的指示和动作,系统中采用电压采集卡采集准备开关、启动开关及急停开关信号,当改变开关状态时电压信号发生变化,通过判断电压信号的变化模式(由高到低/由低到高)执行相应的动作,如程序的运行、指示灯的明暗等。
1.3 扭矩传感器
手制动预紧力的检验最终反映到驱动手柄的扭矩,因此将电机轴扭矩反馈作为最终的检验指标。利用高精度的扭矩传感器采集电机输出轴的实时扭矩,可以提高系统检验的精度。
2 调节控制系统工作原理
安装装调设备,按下准备开关,准备指示灯亮,利用扫码枪扫入车辆信息,按下启动按钮,控制程序运行,电机带动夹具驱动手制动手柄转动,手柄达到第一个设定位置后电枪开始工作,打紧调整螺母;为了防止手制动拉锁卷曲,第一次打紧调整螺母后驱动手柄满齿转动3次以消除各部间隙,再次驱动手柄到第一个设定位置,按设定的扭矩第二次打紧调整螺母,之后驱动手柄到第二个设定位置,通过检验扭矩传感器反馈的扭矩值判断预紧力调节是否合格,并将最终的结果及相关信息写入数据库中以方便查询,最后电机回位,调整结束。调节控制流程图如图1所示。
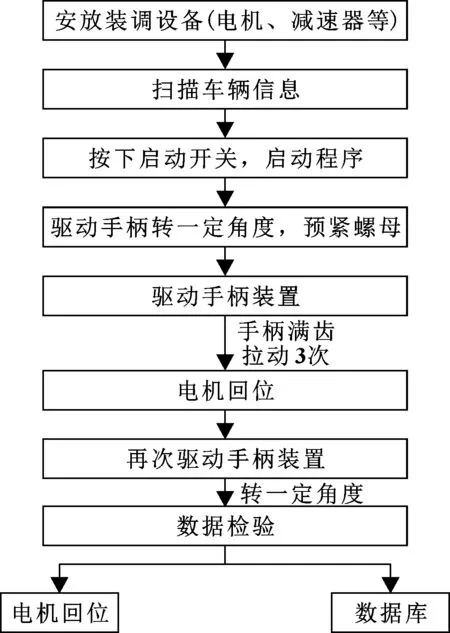
图1 预紧力调控流程图
LabVIEW作为整个系统的软件开发平台,通过Ether CAT网络协议驱动电机驱动器,调节完成后测试中指示灯熄灭,紧急情况可以通过急停开关切断电机驱动器电路,急停解除后恢复正常运行。
3 系统设计及主要控制电路
3.1 3类控制开关控制设计
整个过程通过改变开关状态来采集对应的电压信号,并发出相应的控制指令,为保护电路用电器,每个开关电路串联2个千兆欧姆电阻,电压采集卡的通道并联在其中一个电阻两端,采集对应电阻电压。控制系统中配备了准备开关、启动开关及急停开关,并分别匹配以黄色、绿色及红色指示灯,准备开关和启动开关处于常开状态,急停开关处于常闭状态。如图2所示为3类控制开关的电路设计,电压采集卡0、1、2三个通道分别采集R11、R21、R31三个电阻两端电压。
其中电压采集卡的工作电压为±10 V,额定电流为1 A;控制电路部分采用U=12 V的直流电压,每个电阻阻值R=1 000 Ω,则电路中最大电流Imax=0.006 A,3类开关闭合后采集到的电压值UR11=UR21=UR31=6 V,电流和电压都在安全范围内。
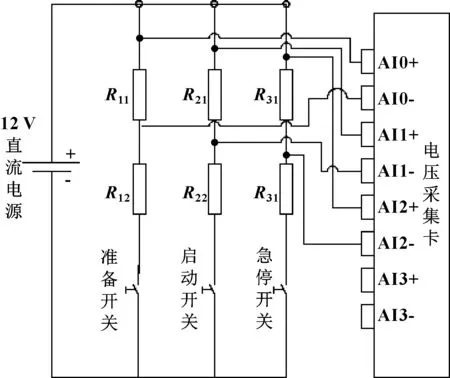
图2 3类开关信号采集电路
3.2 3类信号指示灯控制设计
准备、测试中及急停指示灯都应与3类开关协调使用,保证在开关信号状态改变后相应的指示灯改变状态。测试前,3类指示灯处于熄灭状态,安放好夹具准备指示灯亮;按下启动开关,测试中指示灯亮、准备指示灯熄灭;整个调控流程结束后测试中指示灯自动熄灭;按下急停开关后急停指示灯亮;仅仅通过串联电路的通断来控制3类指示灯的明暗不能够满足实际需求,此系统采用数字输出模块给指示灯提供电压,即当接收到开关状态改变产生的电压信号后闭合数字输出模块通道,通过通道输出的电压驱动信号指示灯的工作,3类指示灯数字输出控制电路如图3所示。
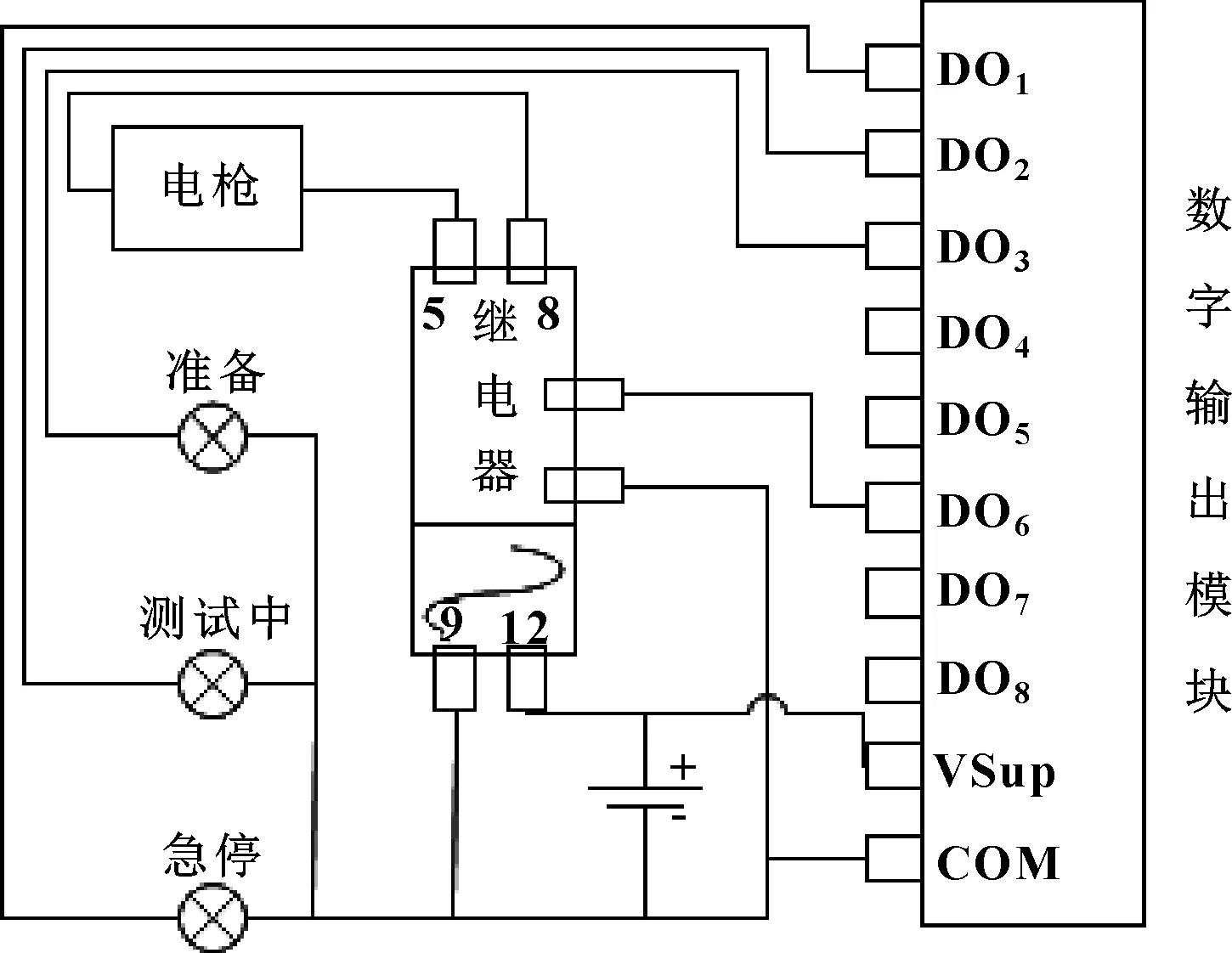
图3 3类指示灯及电枪控制电路
3.3 电枪固定与控制设计
电枪用来调整螺母预紧力,然而手动打紧调整螺母时操作人员很难保证电枪不动,用支架固定的方式代替人手动操作,解决了电枪晃动的问题,调整螺母与电枪输出端通过万向节机构实现扭矩的传递。为实现电枪按规定流程工作,因此需要控制电枪的正反转,系统采用电磁继电器对电枪电路实现控制。如图3所示。
继电器5、9端口和8、12端口分别组成一个常开通道。
当数字输出模块DO6通道无电压输出时,继电器5、9、12、8四个端口和电枪、电源构成的电路处于断开状态;当有电压输出时,继电器控制电路通电,吸合动触点,常开通道闭合,电枪电路通电,开始工作。
4 控制部分软件设计
软件部分主要包括开关及相应指示灯模块、主控制程序模块及数据库模块,分别实现控制信号的传递及指示、电机及电枪运行、结果存储、查询等功能。
4.1 开关及相应指示灯控制策略
3类开关的功能主要有:控制相应指示灯的明暗、传递相应的信号。不同模块间信号的传递主要通过通知器或队列的形式完成,在开关控制部分发送通知,主程序部分等待并接收通知,根据不同的通知内容完成对应的事件。图4是信号通知及部分指示灯控制程序框图。
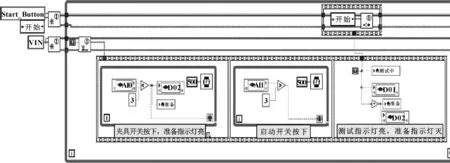
图4 信号通知及部分指示灯控制程序框图
启动开关按下后,测试中指示灯亮,准备指示灯熄灭,通知器向主程序发送“开始”指令;紧急情况时,按下急停按钮,通知器会发送“急停”指令,电机停止工作。
4.2 主控制程序
4.2.1 指令接收
主控制程序部分时刻等待通知器的消息,当接收到“开始”指令后,运行电机及电枪控制程序,完成图1所述的工作流程,当接收到“急停”指令后运行停止电机控制程序。
4.2.2 影响测试精度的因素
综合考虑控制精度、矩频特性、过载能力及速度响应性能等,选取了额定扭矩为4.82 N·m的伺服电机,其中编码器分辨率为65 536,即电机转一周发出65 536个脉冲信号或者接收到65 536个脉冲信号电机转动一周。为了提供更高的位置精度和比较平滑的运动,LabVIEW平台运动控制模块默认的频步率为16,即在LabVIEW平台上控制电机运动时,电机每转一周将会接收到65 536×16个脉冲,设电机转动角度α,对应的转动位移为δ,则有:
δ=(α×65 536×16)/360
电机本身由于摩擦存在着一定的阻力矩,通过减速器和夹具后阻力矩会成倍增加,这对于最终检验有很大影响。传感器反馈的力矩包括了电机、减速器、夹具带来的阻力矩,设作用在手制动上的实际力矩为Ts,检验力矩上限值、下限值分别位Tu、Td,则有:
Ts=Tf-Tz
式中:Ts为实际作用在手刹上的力矩;Tf为传感器反馈的实时力矩;Tz为电机、减速器、夹具等产生的阻力矩;
当Td
4.2.3 阻力矩确定
为确定电机、减速器及夹具部分带来的阻力矩,在相同时间、同一位置处,以不同力矩进行了7组试验,利用Origin数据分析工具对7组试验数据进行对比分析。图5是7组试验数据的分布图,图中横坐标代表测试时间,纵坐标代表电机轴的线速度,其中线速度作为电机轴是否开始转动的指标。
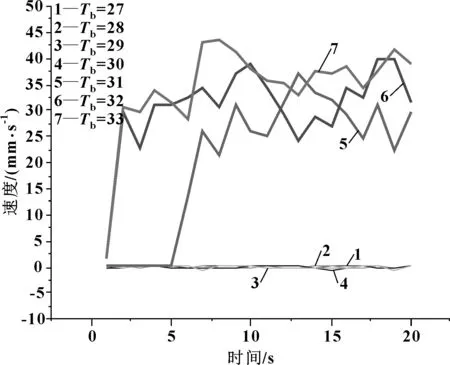
图5 不同力矩下电机轴速度曲线分布
从图5可知:当施加的力矩小于31 N·m时,电机轴的线速度在0上下波动,即施加的力矩不能克服自身的阻力矩;当施加的力矩为31、32、33时,电机轴速度逐渐增加并趋于稳定。综合考虑实际情况及曲线波动最终阻力矩Tz=32。图中的力矩是LabVIEW平台上经过归一化处理的量纲为一的标量,其中标量1 000对应电机额定扭矩4.82 N·m,则有国际单位制下扭矩T(N·m)与标量Tb的线性关系为:
T=0.004 82×Tb
即当Tb=32时,T=0.154 24 N·m。假设选用减速器速比为25,则电机、减速器、夹具部分产生的阻力矩Tz=25T=3.856 N·m;经过减速器减速增扭后阻力矩成倍增加,这对于施加在手刹上的实际力矩的确定造成了很大的误差,严重影响测试精度,因此在检验过程需要加以考虑。
4.3 数据库模块
数据库主要是完成信息存储、查询等功能,为方便数据整理,查询模块分为按时间范围和按测试结果合格性两种方式。
5 结论
基于LabVIEW平台开发半自动化手刹预紧力调整系统,通过控制系统完成各类操作指令及指示;综合考虑适用性与系统成本,利用电磁继电器实现电枪电路的通断及保护。
分析电机工作原理,确定电机轴旋转角度与位置量的关系;分析影响测试精度的因素,用控制变量的方法确定电机、减速器及夹具自身带来的阻力矩,优化最终的检验参数。
[1]周文怡,方俊雅,朱子环.基于LabVIEW与Modbus/TCP的伺服电机控制系统[J].测控技术,2015,34(3):83-84,88.
ZHOU W Y,FANG J Y,ZHU Z H.Control System of Servo Motor Based on LabVIEW and Modbus/TCP[J].Measurement & Control Technology,2015,34(3):83-84,88.
[2]苏仔见,倪攀,许少伦.LabVIEW在运动控制系统实验平台的应用和实现[J].实验室研究与探索,2011,30(10):38-39,110.
SU Z J,NI P,XU S L.Realization of Motion Control System Experimental Platform Based on LabVIEW[J].Research and Exploration in Laboratory,2011,30(10):38-39,110.
[3]于义长,张春龙,张国旺.手制动力调节的相关研究应用[J].轻型汽车技术,2013(1/2):67-70.
[4]侯威.基于NI CompactRIO的直线电机伺服控制研究[D].秦皇岛:燕山大学,2014.
[5]钟伟祺.NSW型手制动机组装试验台设计[J].上海铁道科技,2013(2):28-29.
[6]胡勇,刘强,周永清.基于LabVIEW平台数据采集卡配置参数的保存与加载方法研究[J].交通与计算机,2004,22(6):44-46.
HU Y,LIU Q,ZHOU Y Q.How to Perform Saving and Auto Loading of Configuration Parameter of Acquisition Card Based on LabVIEW[J].Computer and Communications,2004,22(6):44-46.
[7]李宗立.一种基于NI采集卡的测量发动机同步信号的方法[J].汽车实用技术,2015(9):21-22.
LI Z L.A Method for Measuring Synchronous Signal of Engine Based on NI Acquisition Card[J].Automobile Technology,2015(9):21-22.
ResearchofAutomaticalRegulationSystemofHandbrake’sPretighteningForce
NING Zhonglin1,QIN Guangxu1,SONG Pengju2,WU Yafei2
(1.Technical Center,SAIC-GM-Wuling Automobile,Liuzhou Guangxi 545007,China;2.Automotive Engineering School of Wuhan University of Technology,Wuhan Hubei 430070,China)
Appropriateness of handbrake’s pretightening force seriously affects the driver’s maneuverability and driving safety. In view of the present manual regulating station, there are some questions, such as time consuming, low degree of mechanization,accuracy cannot be guaranteed, with lucubrating its regulating mode and process, a set of automatical regulation system of the handbrake’s pretightening force was developed.The signal acquisition card was used to collect all kinds of switch signal,the transmission of switch signal was completed through the notifier,implementing the corresponding control functions.The electromagnetic relay was used to implement electromagnetic relay’s circuit on and off and protection.Based on the experimental data,the factors affecting the accuracy of the system were analyzed.Based on the LabVIEW platform,the functions including automatical regulation,inspection,test result’s sharing,inquiring and so on were achieved.
Handbrake pretightening force; Regulation; Acquisition card; Electromagnetic relay; LabVIEW
2017-05-27
宁忠麟(1983—),男,学士,工程师,主要从事汽车制动系统设计。E-mail:719343354@qq.com。
10.19466/j.cnki.1674-1986.2017.10.007
U270.7
B
1674-1986(2017)10-029-04
