电机控制策略对电动车动力总成电磁振动的影响
2017-11-06王珮琪陈诗阳
于 蓬, 王珮琪, 章 桐,3, 陈诗阳, 余 瑶, 郭 荣
(1.同济大学 新能源汽车工程中心,上海 201804; 2.同济大学 汽车学院,上海 201804; 3.同济大学 中德学院,上海 201804)
电机控制策略对电动车动力总成电磁振动的影响
于 蓬1,2, 王珮琪1,2, 章 桐1,2,3, 陈诗阳1,2, 余 瑶1,2, 郭 荣1,2
(1.同济大学 新能源汽车工程中心,上海 201804; 2.同济大学 汽车学院,上海 201804; 3.同济大学 中德学院,上海 201804)
旨在深入探讨电机控制策略对电动车动力总成电磁振动的影响。给出两类常用电机控制方法,即最大转矩电流比控制方法和直接转矩控制方法,搭建其电机控制模型;建立电机定转子二维电磁分析模型,对两类控制策略下的气隙磁密和电磁力进行仿真分析;并利用电动车动力总成机械结构模型,进一步分析动力总成关键点在两类控制方法下的振动响应。结果表明,所提供的综合考虑电机控制策略、电机本体电磁模型以及动力总成机械模型的联合仿真方法,可以有效预测电机控制策略对振动性能的影响,为从优化控制策略的角度,改善电动车的振动舒适性奠定理论基础。
电动车;电磁振动;最大转矩电流比控制;直接转矩控制
车辆NVH性能的好坏影响消费者的购买意愿。动力总成是新能源车辆和传统车辆的最主要区别之一,由于驱动源内燃机被电动机取代,其结构和振动噪声特性的改变将给研发人员带来新的挑战[1-2]。
很多学者对电动车动力总成振动的分析与优化主要集中在磁固耦合振动分析和机械结构的动力学修改方面,Carmeli等[3-9]针对各类电动车用驱动电机进行了电磁力波获取、动力总成电磁振动分析及电机参数或者机械结构的动力学修改。但是,通过结构优化减小电磁振动将增加电机的加工难度、提高制造成本、损失电机其它性能。假如能够通过改进驱动电机的控制策略,减小电机输出的电流谐波、电磁力谐波,进而减小动力总成的电磁振动,将更能体现电动车动力总成机电一体化的特点,降低工程实现的难度及成本。
然而,目前在电机控制策略的研究方面,主要关注与动力输出相关的性能,如提高动态响应速度和电机运行效率[10]、减小电机转矩脉动[11]、改善控制系统开关频率[12]以及对不同控制策略输出性能的比较[13]等。往往结合诸如神经网络[14]、滑模控制[15]、模糊控制[16]等手段提升电机的输出性能,但是鲜有文献进行电机控制策略对电动车动力总成振动性能影响的研究,通过优选电机控制策略改善电动车振动舒适性能的资料则更少。
本文将电动车动力总成振动分析与电机控制策略分析相结合,以某纯电驱动车辆的动力总成为研究对象,系统分析不同电机控制策略下的动力总成电磁振动响应情况,把握电机控制策略对动力总成电磁振动影响的规律,为进一步的通过控制策略优化提升电动车的NVH性能奠定理论基础。
1 两类电机控制策略
1.1最大转矩电流比控制
永磁同步电机的电枢电流在经过Clark和Park变换后,电磁的转矩方程为

(1)
式中:ωr为电机转子角速度;np为电机极对数;Id、Iq为dq坐标系下的定子等效电流;Ld、Lq分别为dq坐标系下电机直、交轴电感;φf为电机永磁磁链。
采用最大转矩电流比(Maximum Torque Per Ampere,MTPA)控制后,单位电流下的电磁转矩取最大值,交、直轴电流满足
(2)
式中,Is为定子电流。将式(2)代入式(1)可得最大转矩电流比控制下的电机转矩

(3)
在Simulink中搭建基于最大转矩电流比控制的电机模型如图1所示。
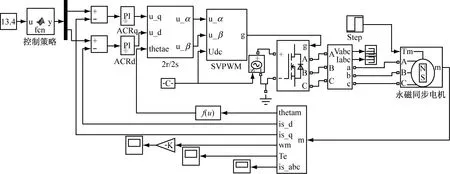
图1 最大转矩电流比控制电机模型Fig.1 Motor model using maximum torque per ampere control strategy
1.2直接转矩控制
电磁转矩的估计在很大程度上取决于定子磁链估计的准确性,因此首先要保证定子磁链估计的准确性。定子磁链矢量估计使用电压模型表示为
(4)
(5)
式中,iα、iβ由定子三相电流ia、ib、ic检测值经过坐标变换得到。
电磁转矩估计值表达式为
(6)
在Simulink中搭建基于直接转矩控制(Direct Torque Control,DTC)的电机模型如图2所示。
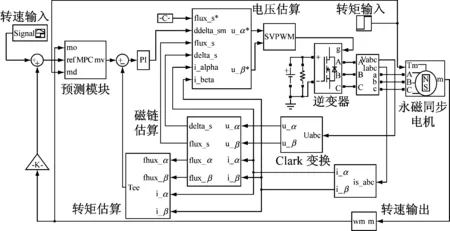
图2 直接转矩控制电机模型Fig.2 Motor model using direct torque control strategy
2 电动车驱动电机电磁激励
2.1永磁同步电机磁场分析
根据电机磁路原理,永磁同步电机的永磁体可以视作恒定的电动势源,转子永磁体磁动势为
(7)
式中:Fμ为旋转磁动势的幅值;ωμ,n为转子在定子给定n次时间谐波电流时的谐波角频率,采用变频供电时,ωμ,nt=2πnf(1±k)。
研究对象为定子开槽、转子光滑的结构,其定气隙磁导为
(8)
式中:Z为定子槽数;Λ0和Λk分别为定子开槽,气隙长度为δ时的平均磁导和第k次谐波磁导的幅值。当忽略饱和作用时,定转子间的气隙磁密为气隙磁势和磁导的乘积
b(θ,t)=f(θ,t)λ(θ,t)
(9)
设br(θ,t)、bt(θ,t)分别为定子铁芯内表面某点的径向和切向气隙磁密,则定子铁芯内表面上,单位面积的径向和切向电磁力可表达为
(10)
式中:μ0为空气磁导率;r为径向电磁力的力波次数。
2.2电机二维电磁模型
电机内部电磁场的研究借助JMAG电磁仿真软件进行。根据研究对象参数在JMAG建立电机结构模型,利用材料库中提供的材料定义材料属性及参数,主要的结构参数和材料参数见表1。最终得到JMAG中的电机电磁仿真模型如图3所示[17]。
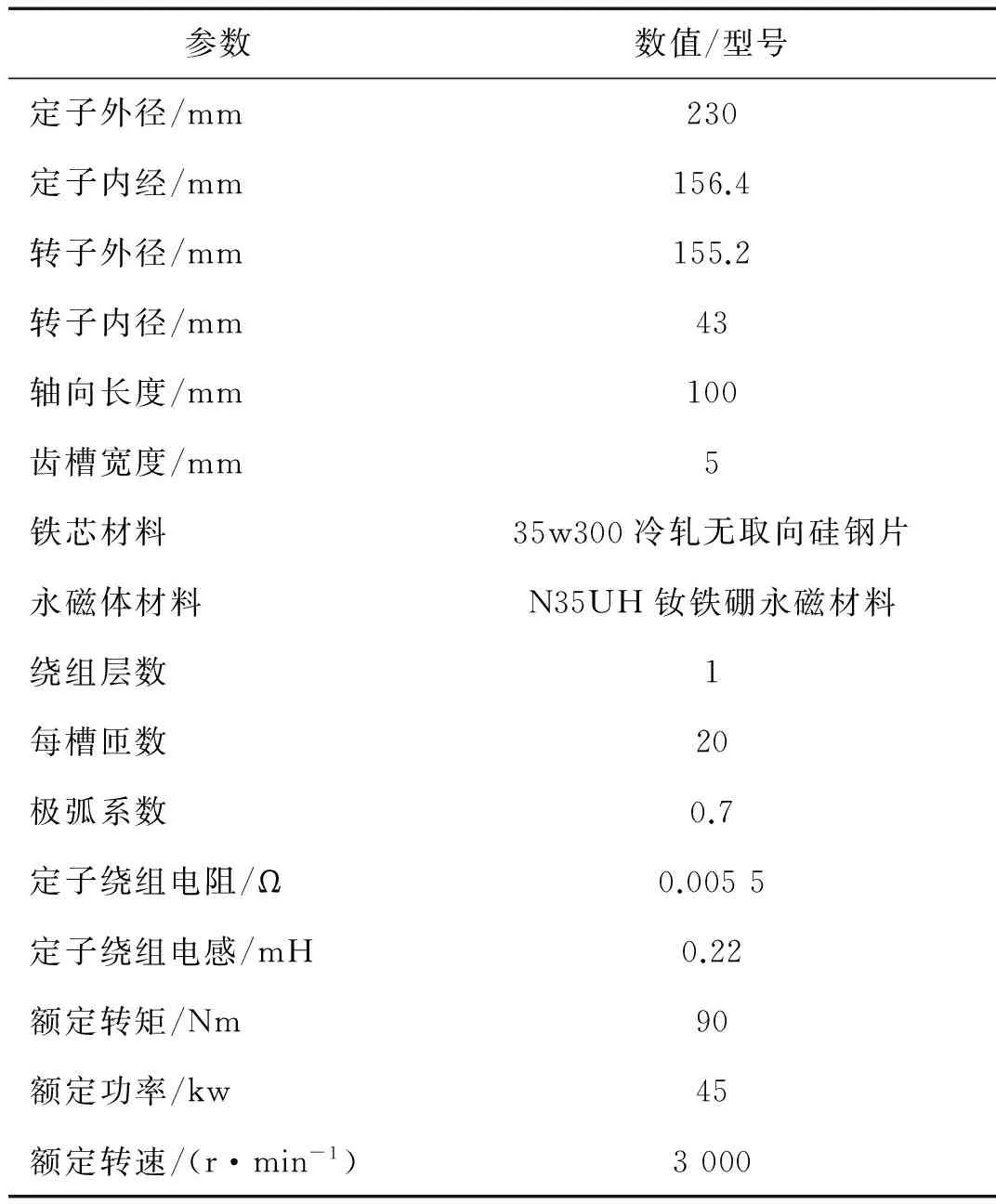
表1 电机模型参数Tab.1 Parameters of motor model
2.3径切向气隙磁密及电磁力仿真
电机内部的电磁力波是引发电机电磁振动和噪声的主要原因,其中径向电磁力的贡献较大,切向电磁力虽然小于径向电磁力,但由于动力总成集成了电机和减速器,不再是纯圆柱结构,其振型亦受到切向电磁力的影响,完全忽略切向电磁力将造成较大的仿真误差。
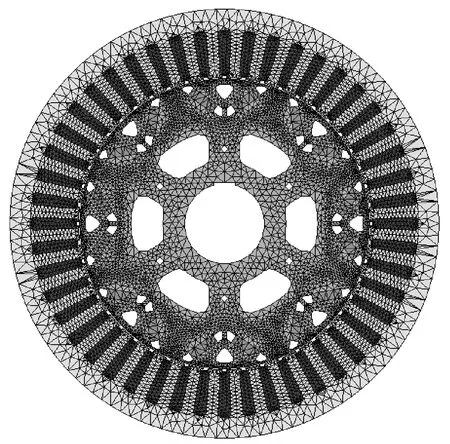
图3 电机电磁分析模型Fig.3 Electromagnetic model of motor
选取车速30 km/h工况,将前述两类电机控制策略下的电机三相电流作用于电磁分析模型,使用Simulink和JMAG进行同步联合仿真。电机某稳态工况下的气隙磁密以及电磁力的频谱分析结果,如图4所示。
图4(a)为MTPA控制以及DTC控制下的气隙磁密的频谱对比图,两者均在fc=(2n±1)f0的频率点处出现峰值,其中fc为气隙磁密特征频率,f0为该工况下的电流频率,即135 Hz、675 Hz、945 Hz,分别对应电流频率的1倍频、5倍频、7倍频。对比发现,DTC策略下,这些频率点处的气隙磁密幅值相对于MTPA策略分别降低了5.3%、17.6%、17.9%。
图4(b)为两类控制策略下的切向气隙磁密频域对比图,与4(a)类似,在DTC策略下,峰值频率点处的气隙磁密幅值相对于MTPA控制策略都略有降低,特别是电流频率的1倍频、5倍频、7倍频处气隙磁密峰值分别降低了4.4%、23.6%、19.6%。
图4(c)为两类控制策略下的径向电磁力频域对比图。不同于电机的径、切向气隙磁密,电机输出的电磁力在频率点270 Hz、810 Hz、1 080 Hz、1 620 Hz、1 890 Hz等处有较大幅值,这些频率点分别对应该工况下电流频率的2倍频、6倍频、8倍频、12倍频、14倍频,即fe=2nf0频率点处,且随着频率的增大电磁力幅值在减小。对比发现,DTC策略下,这些频率点处的电磁力幅值分别降低了5.6%、11.1%、6.5%、9.3%、8.5%。

(a) 径向气隙磁密频谱对比图

(b) 切向气隙磁密频谱对比图
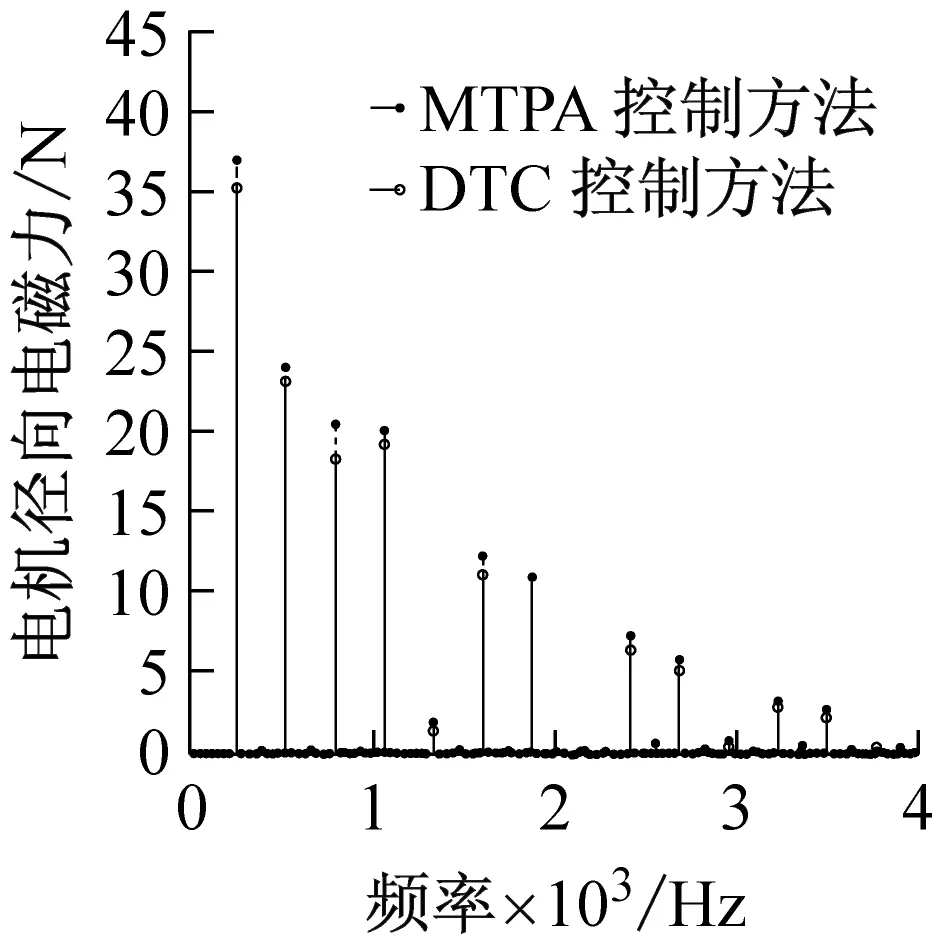
(c) 径向电磁力频谱对比图

(d) 切向电磁力频谱对比图图4 30 km/h工况下仿真结果Fig.4 Results of electromagnetic simulation under 30 km/h
图4(d)为切向电磁力频域对比图。电机输出的电磁力依旧满足fe=2nf0,DTC策略下,这些频率点处的电磁力幅值相对于最大转矩电力比控制都略有下降,特别是电流频率的6倍频、12倍频处电磁力峰值分别下降了6.4%、4.8%。
与径向电磁力结果不同的是,切向电磁力比径向电磁力多出了1 350 Hz、2 160 Hz两个峰值点,即电流频率的10倍频、16倍频;另外,切向电磁力的幅值虽然从整体上来看是随着频率增加而减小,但电流频率的6倍频、12倍频这两点,即电流的6i倍频处峰值更为突出,说明径向和切向电磁力规律并不完全趋同,控制策略对切向电磁力的影响相对较大,这也反映了考虑切向电磁力的必要性。
3 电动车动力总成电磁激励振动
3.1电动车动力总成模型
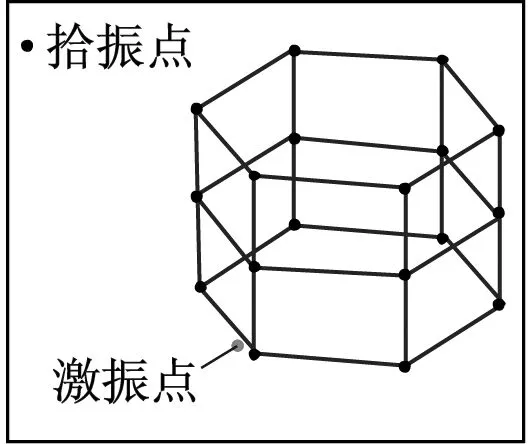
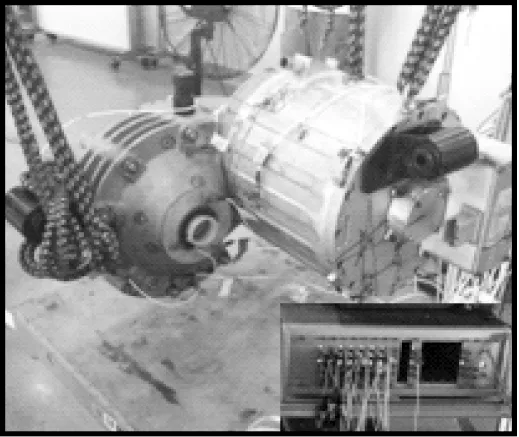
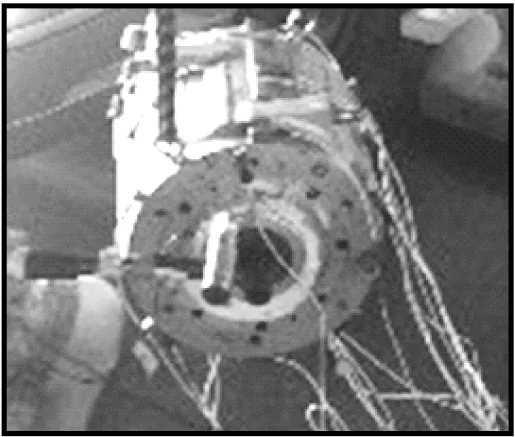
动力总成包括电机、减/差速器、悬置系统和水套等,所建动力总成有限元模型如图5所示。为保证动力总成组件模型的正确性,同时进行了电机、减速器及其组件(动力总成)的模态试验分析,试验测点和现场如图6和图7所示。电机和减速器模态试验用于修改电机仿真模型和减速器仿真模型,动力总成模态试验用于校验图5中整体仿真模型的正确性。模态试验结果和仿真结果如表2所示,从中看出建模和试验误差较小,满足工程需要[18-19]。
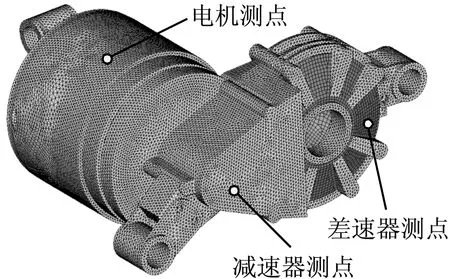
图5 动力总成振动仿真模型Fig.5 Powertrain vibration model
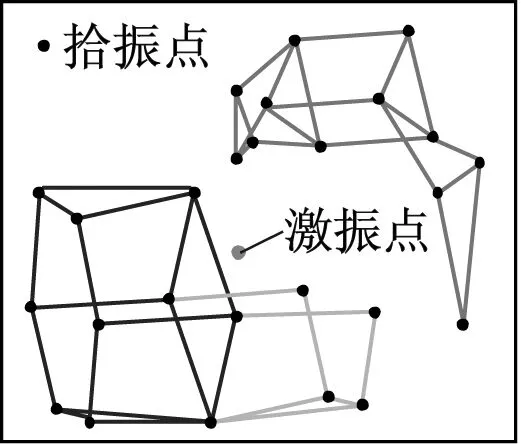
(a) 动力总成
(b) 电机
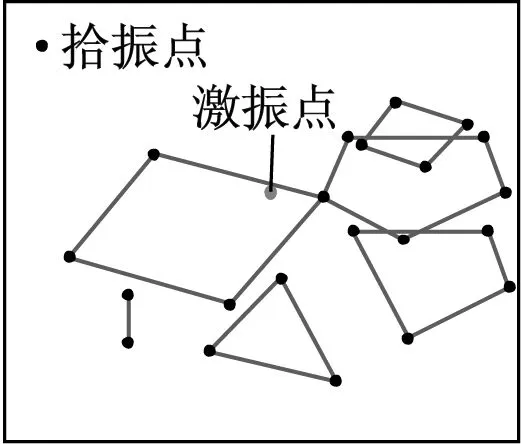
(c) 减速器图6 模态试验激振点和测点Fig.6 Test points of modal experiment
进一步对动力总成壳体振动进行两类控制策略下的动态响应分析,提取壳体表面各个测点的振动响应结果。有限元模型上各测点位置如图5所示。
(a) 动力总成
(b) 电机

(c) 减速器图7 模态试验现场Fig.7 The scene of modal test
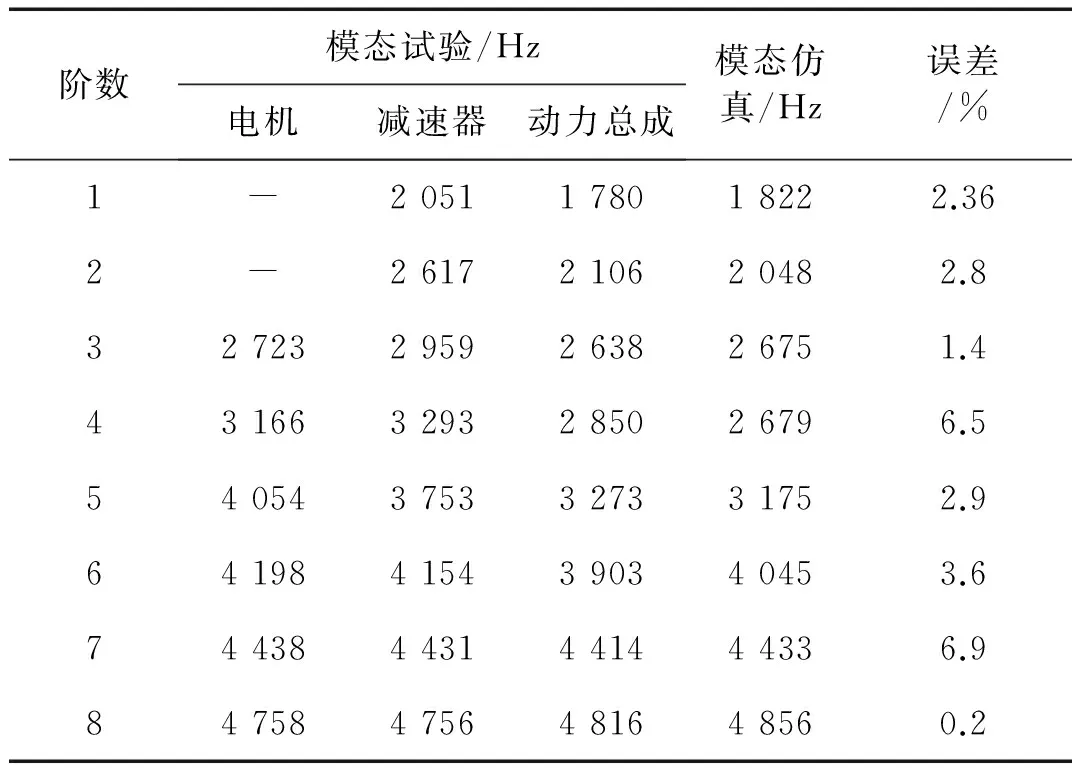
表2 模态试验和仿真结果Tab.2 Results of modal test and simulation
3.2MTPA控制下的动力总成电磁振动
以往研究认为径向电磁力波是引发动力总成振动的主要因素,在理论分析和响应分析时往往忽略切向电磁力波的作用。实际上,当电磁力所作用的定子系统是纯圆柱或者纯环形结构时,只考虑径向电磁力波的作用是符合工程实际的;当电磁力所作用的系统结构比较复杂时,只考虑径向电磁力可能会造成较大的误差。如动力总成壳体系统,同时包括电机定子、减/差速器壳体以及内部齿轮支撑系统,在电磁力的作用下,振型和响应都将产生比纯圆柱结构更加丰富的变化[20]。因此,进行电动车动力总成壳体在径向电磁激励单独作用和径/切向电磁激励共同作用下的振动响应分析与对比。
提取电机、减速器各对应点的振动响应仿真结果,如图8所示。
从图8看到,单独考虑径向电磁力作用的动力总成壳体振动响应结果,与综合考虑径向和切向电磁力作用相比,发生了较大的变化,主要表现在:
(1) 峰值方面,各点各方向的峰值均减小;
(2) 频率方面,减速器仿真点X向的第一峰值频率点向右偏移,电机仿真点三向和减速器仿真点的Y向和Z向的第一峰值频率向左偏移。
峰值和频率变化汇总如表3所示。从中看出,减速器仿真点的X向和Z向峰值偏差量均达到64%,其余各点的峰值和频率偏差量也在20%~55%。所以,无论是峰值偏差还是频率偏移误差,基本都超过10%的工程可接受误差范围。
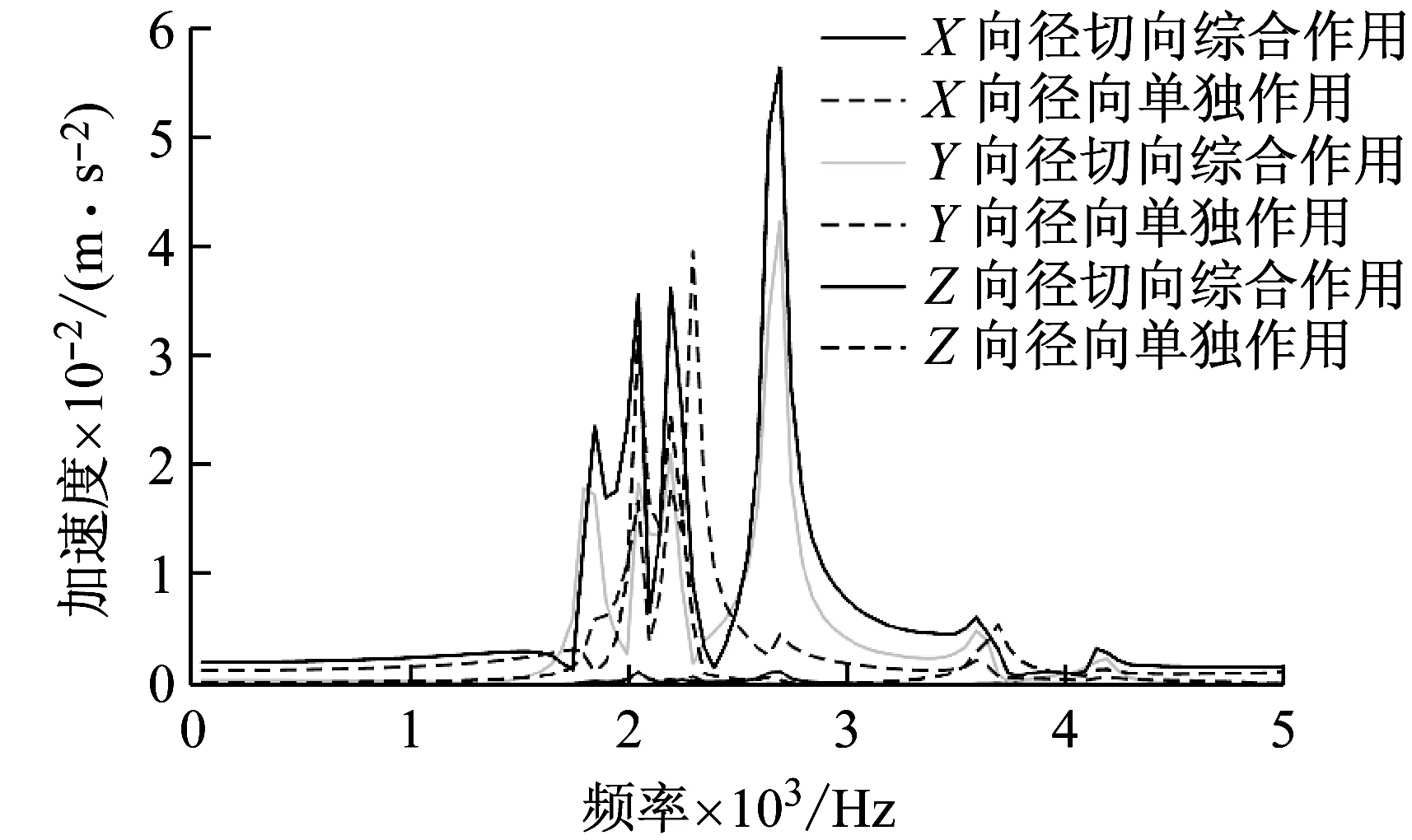
(a) 电机仿真点三向
(b) 减速器仿真点三向图8 加速度响应仿真结果Fig.8 Simulation results of acceleration response
综上,只考虑径向电磁力波进行复杂动力总成壳体表面振动的响应研究是不满足工程要求的。今后在进行复杂动力总成结构件的电磁振动仿真时,应同时关注径向和切向电磁力的作用,以达到较为准确和合理的结果。
3.3两类控制策略下的动力总成电磁振动
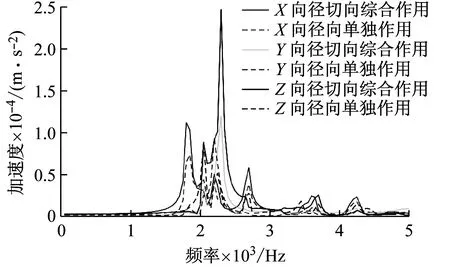
对比各感兴趣点的振动加速度响应。仿真点各向加速度响应如图7所示,从图中看出:
(1) 结合动力总成模态分析结果,动力总成前8阶固有频率值为1 917 Hz、2 062 Hz、2 333 Hz、2 445 Hz、2 757 Hz、3 228 Hz、3 484 Hz以及3 724 Hz。在不同电机控制策略下,模态频率以及动响应峰值频率点并未发生变化,但是模态频率峰值在直接转矩控制策略下,得到了不同程度的降低。
(2) 各仿真的点的第一峰值都得到了明显的抑制。电机仿真点的三向加速度响应的第一峰值降幅分别为9.69%、7.7%、7.19%;类似的,减速器仿真点三向加速度的第一峰值分别降低9.12%、11.36%、10.99%。说明直接转矩控制策略能够有效的抑制第一峰值点的电流、电磁力输出的波动。
(3) 直接转矩控制时,各仿真点的第二峰值有增有减,但总体减小。如电机仿真点的X向和Z向加速度第二峰值减小量为19.53%和19.97%,虽然减速器X向的第二峰值和电机仿真点Y向的第二峰值在优化直接转矩控制策略下反向升高,升高量为5.3×105m/s-2和0.001 94 m/s-2,但是由于其数量级较小,并不影响控制策略比对的总体效果。

表3 径向电磁振动响应的误差Tab.3 Response error between radial excitation only and comprehensive excitations
综上,相同的动力总成机械结构模型,在选用不同的电机控制策略时,其壳体振动响应存在一定程度的变化,变化量在10%~20%,这将进一步改变由壳体表面引发的电磁噪声的声压级,从整体上改变电动车动力总成振动和噪声的性能。
4 结 论
本文把握了控制策略对动力总成振动性能影响的规律,将两类电机控制方法用于所研究电动车,从电流控制策略选取角度,比对了动力总成的振动响应,得到以下结论:
(1) 直接转矩控制与最大转矩电流比控制相比,从减小动力总成结构振动的角度更具有优势;直接转矩控制能够同时减小径向和切向电磁力谐波,有利于动力总成振动性能的提高。
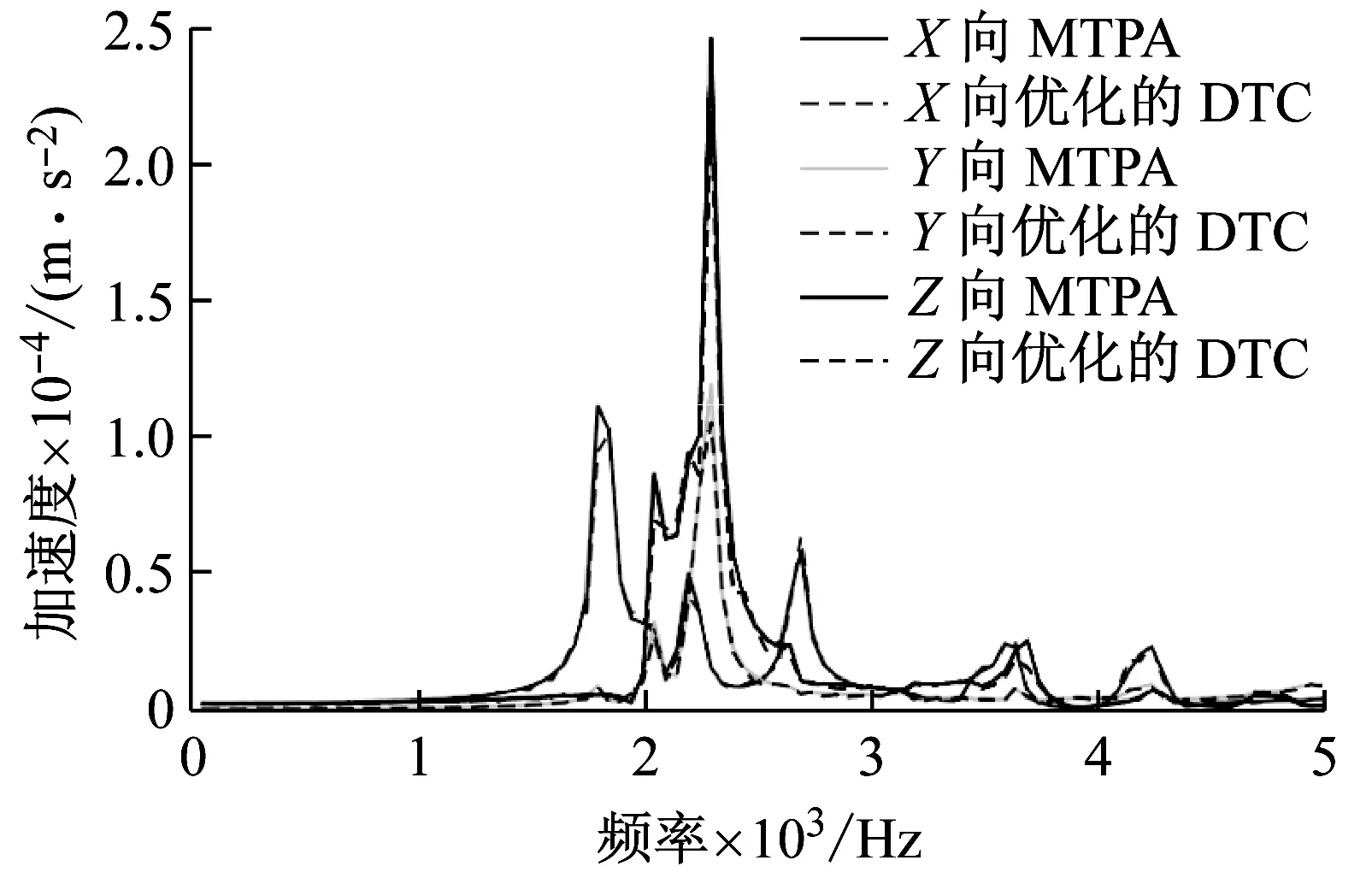
(a) 电机仿真点三向
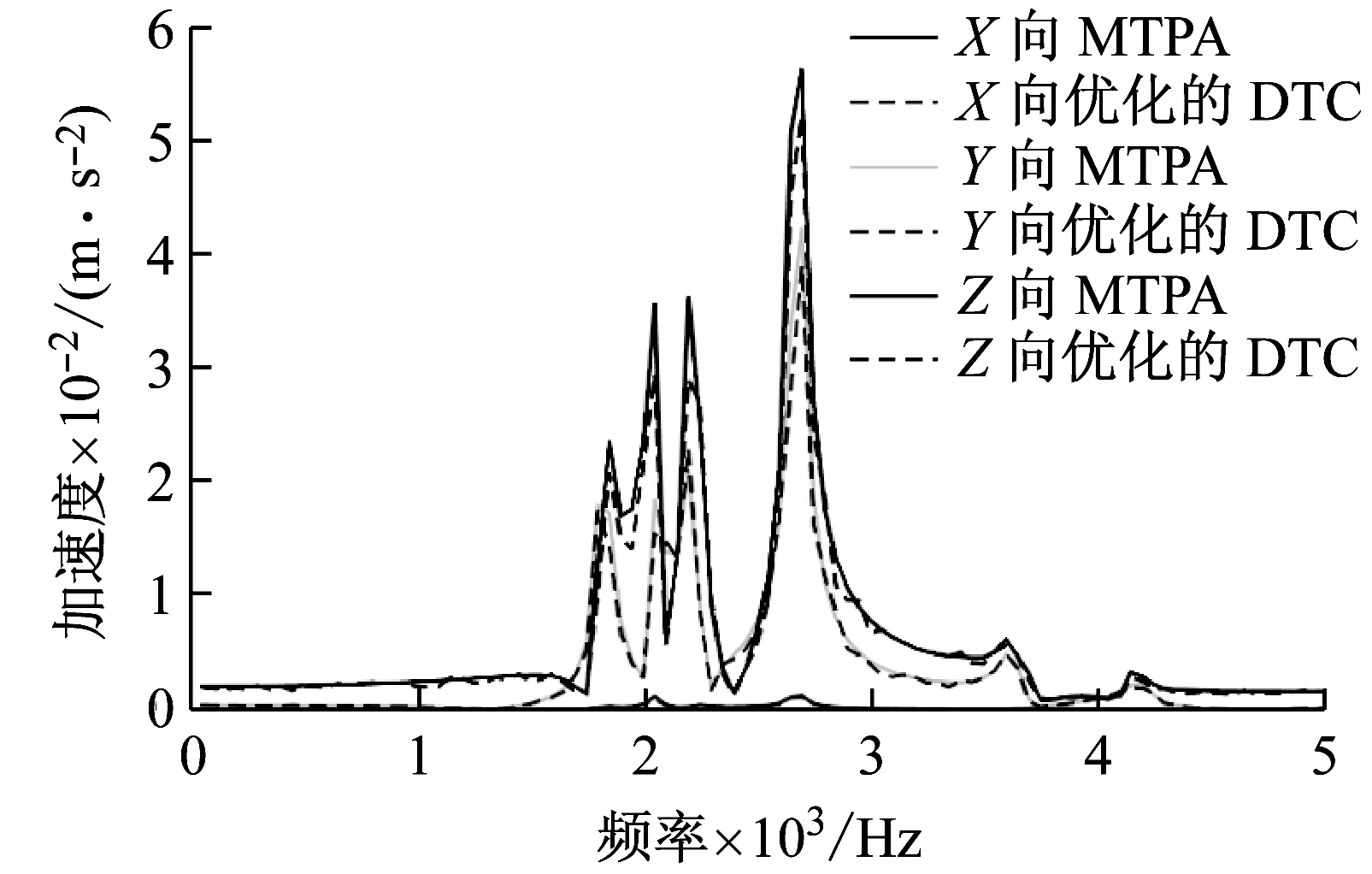
(b) 减速器仿真点三向图9 加速度响应仿真结果Fig.9 Simulation results of acceleration response
(2) 所提供的联合仿真方法,可以给工程以借鉴。该方法主要包括考虑控制策略的电机模块、考虑电机本体结构特性的电磁模块、考虑动力总成必要机械因素的有限元结构模块。三类模块的有效结合可以充分体现电动车动力总成的机电磁控多因素影响,为电动车动力总成提供有效的振动仿真预测和控制策略优化平台。
(3) 在电动车动力总成的集成与开发中,应该兼顾驱动电机的动力性能和NVH性能,将振动噪声的预测和评估贯穿新能源车辆研发的始终,以期从多方面提升所研究车辆的综合性能。
[1] 于蓬,贺立钊,章桐,等. 集中电机驱动车辆动力传动系统NVH性能研究现状与展望[J]. 机械设计, 2014, 31(3): 1-5.
YU Peng, HE Lizhao, ZHANG Tong, et al. NVH performance study of centralized motor driven vehicle power train[J]. Journal of Machine Design, 2014,31(3):1-5.
[2] 于蓬,王晓华,章桐,等. 集中式驱动纯电动车振动特性试验研究[J]. 振动与冲击, 2015, 34(14): 38-44.
YU Peng, WANG Xiaohua, ZHANG Tong, et al. Experimental study on vibration characteristics of central driven pure electric vehicle[J]. Journal of Vibration and Shock, 2015, 34(14): 38-44.
[3] CARMELI M S, DEZZA F C, MAURI M. Electromagnetic vibration and noise analysis of an external rotor permanent magnet motor[C]∥ Power Electronics, Electrical Drives, Automation and Motion. Taormina: IEEE, 2006: 1028-1033.
[4] LI J T, LIU Z J, NAY L H A. Effect of radial magnetic forces in permanent magnet motors with rotor eccentricity[J]. Magnetics, IEEE Transactions, 2007, 43(6): 2525-2527.
[5] KANG G H, SON Y D, KIM G T. The noise and vibration analysis of BLDC motor due to asymmetrical permanent magnet overhang effects[J]. IEEE Transactions on Industry Applications, 2007,44(5): 1530-1537.
[6] ZHU Z Q, CHEN J T, WU L J. Influence of stator asymmetry on cogging torque of permanent magnet brushless machines[J]. Magnetics, IEEE Transactions, 2008, 44(1): 3851-3854.
[7] 何吕昌. 电动汽车用永磁直流无刷驱动电机电磁噪声研究[D].上海:同济大学,2012.
[8] 马琮淦. 电动车用永磁同步电机非线性电磁振动和异常噪声研究[D].上海:同济大学,2014.
[9] 方源,章桐,冷毅,等. 基于轮齿修形的电动车齿轮啸叫噪声品质研究[J]. 振动与冲击, 2016, 35(9): 123-128.
FANG Yuan, ZHANG Tong, LENG Yi, et al. Research on sound quality of electric vehicle gear whine noise based on gear modification[J]. Journal of Vibration and Shock, 2016, 35(9): 123-128.
[10] 尚重阳,邓利红,周建华,等.一种永磁同步电动机的最大转矩电流比控制方法[J]. 自动化技术与应用, 2008, 27(7): 90-92.
SHANG Chongyang, DENG Lihong, ZHOU Jianhua, et al. Maximum torque per ampere control for permanent magnet synchronous motor[J]. Automation Technology and Application, 2008, 27(7): 90-92.
[11] 王斌,王跃,郭伟,等. 基于定子磁链降阶状态观测的永磁同步电机无差拍直接转矩控制系统[J]. 电工技术学报, 2014, 29(3): 160-171.
WANG Bin, WANG Yue, GUO Wei, et al. Deadbeat direct torque control of permanent magnet synchronous motor based on reduced order stator flux observer[J]. Transactions of China Electro technical Sosiety, 2014, 29(3): 160-171.
[12] CASADEI D, SERRA G, TANI A. Implementation of a direct control algorithm for induction motors based on discrete space vector modulation[J].IEEE Transactions on Power Electronic, 2000, 15(4): 769-777.
[13] CASADEI D, PROFUMO F, SERRA G. FOC and DTC two viable schemes for induction motors torque control[J]. IEEE Transactions on PE, 2002,17(5): 779-787.
[14] ORILLE A L, SOWILAM G M A. Application of neural networks for direct torque control [J].Computers & Industrial Engineering, 1999, 37(1): 391-394.
[15] 康劲松,崔宇航,王硕. 基于电流快速响应的永磁同步电机六拍运行控制策略[J]. 电工技术学报,2016,31(1):165-174.
KANG Jinsong, CUI Yuhang, WANG Shuo. The current rapid response control strategy for the six-step operation of permanent magnet synchronous motors [J]. Transactions of China Electro Technical Society, 2016, 31(1): 165-174.
[16] CUI Jiarui, LI Qing, ZHANG Bo, et al. Permanent magnet synchronous motor of variable universe adaptive fuzzy PID control[J]. Proceedings of the CSEE, 2013(Sup1): 190-194.
[17] 于蓬,陈霏霏,章桐,等. 集中驱动式电动车动力总成系统振动特性分析[J]. 振动与冲击,2015, 34(1): 44-48.
YU Peng,CHEN Feifei,ZHANG Tong,et al. Vibration characteristics analysis of a central-driven electric vehicle powertrain[J]. Journal of Vibration and Shock,2015, 34(1): 44-48.
[18] 陈诗阳, 于蓬, 章桐, 等. 电动车动力总成模态及振动响应仿真研究[J]. 机电一体化, 2015, 21(4): 32-38.
CHEN Shiyang, YU Peng,ZHANG Tong,et al. Simulation study on modal and vibration response of an EV powertrain[J]. Mechatronics, 2015, 21(4): 32-38.
[19] 陈诗阳,于蓬,章桐,等. 考虑流固耦合的动力总成振动响应仿真研究[J]. 机械传动,2016, 40(2): 10-14.
CHEN Shiyang, YU Peng, ZHANG Tong, et al. Simulation study on the vibration response of an EV powertrain considering the fluid structure coupling[J]. Journal of Mechanical Transmission, 2016, 40(2): 10-14.
[20] 于蓬,陈诗阳,章桐,等. 电动车动力总成在机械-电磁激励下的振动分析[J]. 振动与冲击, 2016, 35(13): 99-105.
YU Peng,CHEN Shiyang,ZHANG Tong,et al. Study on the vibration response of EV power train under mechanical-electromagnetic excitation[J]. Journal of Vibration and Shock, 2016, 35(13): 99-105.
Effectsofmotorcontrolstrategiesontheelectromagneticvibrationofelectricvehiclepowertrains
YU Peng1,2, WANG Peiqi1,2, ZHANG Tong1,2,3, CHEN Shiyang1,2, YU Yao1,2, GUO Rong1,2
(1. New Clean Energy Automotive Engineering Center,Tongji University, Shanghai 201804;2. School of Automotive Studies, Tongji University,Shanghai 201804, China;3. Sino-German College of Applied Sciences, Tongji University, Shanghai 201804, China)
Aiming at further exploring the effect of motor control strategy on the electromagnetic vibration of electric vehicle power trains, two types of conventional motor control methods, the maximum torque per ampere control method and the direct torque control method, were proposed, and their motor control models were built. A two-dimensional electromagnetic analysis model of the motor was established, and the air gap flux density and electromagnetic force under the two types of control strategies were simulated. Finally, further analysis on the power train vibration responses at the key points was conducted using the electric vehicle power train mechanical structure model with the two control methods. The results show that the provided co-simulation method,integratedly considering the motor control strategies, motor body electromagnetic model and power train mechanical model can effectively predict the impact of motor control strategy on the vibration performance. The study provides a theoretical basis for improving the electric vehicle vibration comfort from the perspective of control strategy optimization.
electric vehicle; electromagnetic vibration; maximum torque per ampere control; direct torque control
U469.72
A
10.13465/j.cnki.jvs.2017.19.018
国家863计划项目(2011AA11A265);国家自然科学基金(51205290);中央高校基本科研业务费专项资金项目(1700219118)
2016-03-25 修改稿收到日期:2017-07-19
于蓬 男,博士,1986年生
章桐 男,教授,博士生导师,1960年生