水下航行器附加质量数值计算方法
2017-11-04莫慧黠党建军
莫慧黠,党建军,罗 凯,黄 闯,黄 标
(西北工业大学 航海学院,陕西 西安,710072)
水下航行器附加质量数值计算方法
莫慧黠,党建军,罗 凯,黄 闯,黄 标
(西北工业大学 航海学院,陕西 西安,710072)
附加质量力是水下航行器在非定常运动中所受到的流体惯性力,其实验或数值计算过程均涉及非定常运动,结果获取难度大。为了进一步提高水下航行器附加质量参数的计算精度和效率,基于动参考系的计算思想,耦合3D N-S方程和k-epsilon 湍流模型,建立了水下航行器非定常运动的流场计算模型; 对椭球、圆柱标准模型的惯性力特性以及水下航行器的全部附加质量特性进行了数值仿真。结果表明,椭球、圆柱附加质量的数值计算结果精确,且水下航行器附加质量的计算误差不超过10%。文中所提方法将有助于水下航行器总体设计和水动力计算。
水下航行器; 附加质量; 动参考系; 数值仿真
0 引言
附加质量力是水下航行器在非定常运动中所受到的流体惯性力,水下航行器非定常运动相对于定常运动,周围流体作用于水下航行器的力会产生一个增量。这一部分增量在人为设定中可以拥有惯性度量的量纲,被称为附加质量力。附加质量对于水下航行器的运动稳定控制有着重要影响。准确求解附加质量对于水下航行器运动精确控制具有重要意义。
中船重工 705所周景军等[1]基于相对运动,采用添加动量源项的方法,求解了附加质量; 上海交大的姚保太[2]、傅慧萍[3]等人通过求解 3D N-S方程,采用网格重构,进行了简单无附体附加质量求解; 西北工业大学王鹏等[4-5]对复杂航行器的位置力和阻尼力进行了计算,并未对惯性力进行研究; 而简单的球、椭球、圆柱等形状物体可以用基于势流理论的理想流体附加质量数值计算,获得理论精确解[6-9]; 此外基于物体外形,采用细长体假设及切片理论,使用修正系数考虑3D效应的工程计算方法,也可以计算得到附加质量[10-12]; 试验通过拖曳旋转水池试验的方法来获取附加质量,但除平动附加惯性力比较准确之外,附加惯性矩和附加静矩误差较大[13]。
因此,为了进一步提高水下航行器附加质量参数的计算精度和效率,基于动参考系的思想,耦合3D N-S方程和k-epsilon湍流模型,建立了水下航行器非定常运动的流场计算模型,通过让外壁和雷体一起在流域中运动,模拟几何体的平动与旋转,得到了一种新的附加质量计算流体力学(computational fluid dynamics,CFD)数值解法。无需添加动量源项,不采用动网格以及网格更新技术,仅仅使用一套网格,就能求出复杂外形航行器的全部附加质量,并且经过椭球、圆柱以及一个标准的复杂外形水下航行器进行了检验,结果准确,计算效率高。
1 数值模型建立
1.1 问题描述
附加质量一般取决于流场中物体形状及运动方向,与运动速度无关[1]。附加惯性力的影响只有通过非定常运动才能有所表现,一般求解思路如下。
水下航行器加速直线运动、变角速度转动等非定常运动过程的数值仿真最直接的方法是采用动网格技术,但是对于带有泵喷推进器、对转桨的水下航行器,采用动网格技术由于涉及到网格重生,网格数量大,同时质量难以保证,从而严重影响求解精度[1],或者通过在动量方程中添加动量源项的方法保证了整个流场压力分布的真实性,但是在计算附加惯性矩时,网格需要重新划分,并且旋转运动时,需要编写复杂的UDF动量源项,在计算旋转过程中,航行器的受力复杂,受网格精度的影响很大。
而采用动参考系法,将边界与研究对象固定为体坐标系,流域与地面坐标系绑定,边界与研究对象共同运动,相对于研究对象速度不为零,边界条件采用速度进口与压力出口,需要编写的UDF进行二次开发。地面系不赋予任何运动特征,设置默认,速度为零,直接赋予研究对象所在体系相应的运动初始速度与加速度即可。
关于其方法的基本内涵方程如下

式中:vr是流域相对地面坐标的运动速度;ur是研究对象相对流域的运动速度;v是研究对象相对于地面坐标的运动速度;ur1是研究对象相对边界的运动速度;ur2是边界相对于流域的速度;ω1是研究对象相对流域的转速;ω2是流域相对于地面坐标系的转速,ω是研究对象相对于地面坐标系的转速。
该方法的本质是运动的相对性,与添加动量源项的方法不同的是,该方法是直接将速度特性赋予研究对象与边界。无需进行第2套网格划分,赋予 UDF二次开发的平动与转动,将不同网格的影响彻底排除。
1.2 数值方法
1.2.1 控制方程
文中采用雷诺时均 N-S方程,湍流模型采用Realizablek-ε模型。不可压缩流动控制方程主要包括连续性方程和N-S方程。
1) 连续性方程

2) 运动方程(N-S方程)

式中:U为速度矢量;ρ,p,g,μ分别为密度、压强、重力加速度和动力粘度。
1.2.2 湍流模型
刘丹[13]、刘成刚[14]、马烨[15]等人的论文中提到关于Realizablek-ε是为了应对标准k-ε模型对时均应变率特别大时,有可能导致负的正应力出现,为使流动符合湍流的物理定律,对正应力进行某种数学约束的一个改进模型。在 Realizablek-ε模型中,关于k和ε的输运方程如下。
关于湍流强度k方程

关于湍流耗散率ε方程

式中:μt为湍动粘度;μ为流体的时均速度;kσ,εσ分别为k-ε方程的湍流能量普朗特数;C1,C2为经验常数;E为时均应变率;ν为运动粘度;xi,xj为各方向距离。
1.2.3 计算域划分及边界条件
建立与控制方程相应的离散方程,文中采用工程上应用广泛的压力耦合方程组的半隐式方法——SIMPLE算法,通过构造压力修正方程以及速度修正方程,直至求得收敛解为止。
网格划分是数值方法的基础,以某典型外形水下航行器为例,对其进行网格划分。该航行器由于附体形状比较复杂,因此网格划分是工作重点。此次网格划分采用 ICEM软件,流域为圆柱体,流域长度为8l,l为产品的长度,直径为20d,d为产品圆柱段的横截面直径,以确保其流域足够大。航行器附近流域为加密区域,加密区边界层起始厚度为0.1 mm,比例为1.2倍,共有5层,最终得到了一套完整的高质量网格,网格质量均在 0.5以上,可以满足计算要求。网格如图 1和图2所示。

图1 流域网格Fig. 1 Mesh of flow field

图2 航行器网格Fig. 2 Mesh of an undersea vehicle
λ11,λ22,λ33,λ62计算边界条件设置: 3 个平移方向的附加质量通过3个方向加速运动与定常匀速运动的惯性力作差获得,而λ62是由于平动产生的矩,同样通过加速运动与定常匀速运动的惯性静矩作差可以得到。在动参考系方法中,无需添加动量源项,如图1,速度进口不给予设置,速度设为零,其余默认,尾部的边界条件设置为压力出口,参考压力设置为零即可,直接在动坐标系域中赋予研究对象速度特性与加速度特性,导入UDF,便能获得真实的平动运动压力场分布。
λ44,λ55,λ66,λ35计算边界条件设置: 3 个旋转方向的附加质量通过3个方向绕质心的加速旋转运动与定常匀速旋转的附加惯性矩作差获得,λ35是旋转产生的力,同样通过加速运动与定常匀速运动的惯性力作差可以得到。在动参考系中,无需添加动量源项,设置见图 1,直接在动坐标系域中赋予研究对象旋转角速度与角加速度特性即可,便能获得真实的旋转运动压力场分布。
若用相对运动法,在计算非定常运动时,添加动量源项才能保证流场的真实性,并且在计算λ62和λ35时还要进行特殊处理,比如为了避免流动发生分离,采用理想流体计算; 而动网格技术需要网格重生,计算时间很长。该方法避开了 2种方法的不足,较以往方法有所改进。
2 数值模型验证
文中全部采用了结构化网格,一是对网格数量进行了有效控制,二是对网格质量进行了确保,从而在效率和结果上都确保了可行性。使用的数值方法为了证明其可用性与准确性,计算模型首先采用了有精确解的椭球。椭球长半轴长500 mm,短半轴长250 mm,网格数量分别选取20万、40万以及60万,均采用有粘模型进行数值计算。
分别对 3种数量的网格进行计算,得到了椭球的阻力系数,对其进行了网格无关性验证。最后选取数量为20万的椭球网格用于计算附加质量。
2.1 标准椭球附加质量计算
给出了对应尺寸椭球附加质量理论解以及数值计算解的对比见表 1。对比计算结果,误差在0.5%以内,精确度极高。为了验证该方法的适用性,又使用圆柱进行了验证。圆柱与椭球为 2个拥有精确理论的简单模型。

表1 椭球附加质量计算结果Table 1 Calculation results of ellipsoid′s additional mass
2.2 标准圆柱的附加质量计算
由于圆柱的理论计算公式要求圆柱的长细比较大,选取长细比L/D=200。将圆柱的旋转中心定在圆柱的形心,此时,圆柱的附加质量中不存在λ26,λ35。而λ11,λ44则基本可以忽略。表 2 给出了对应尺寸的圆柱附加质量理论解以及数值计算解的对比结果,可以发现其理论解与数值计算结果相对误差在2%以内,
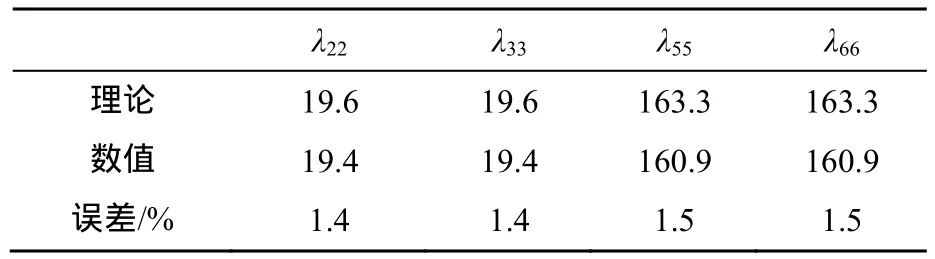
表2 圆柱附加质量计算结果Table 2 Calculation results of circular cylinder′s additional mass
用相同的模型,将其旋转中心定在形心偏左1 m的地方,这样λ26和λ35就会存在。再次将对应尺寸的理论参考值进行求解,再用模型进行验证,得出结果如表3所示。
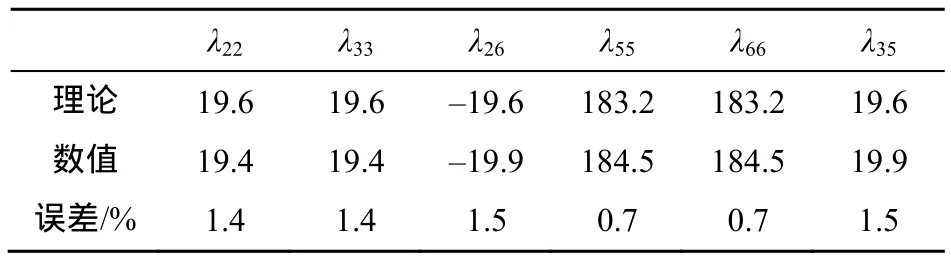
表3 形心偏左1 m时圆柱附加质量计算结果Table 3 Calculation results of circular cylinder′s additional mass when the centroid is 1 m left
由椭球和圆柱计算结果对比,可以初步验证该方法的计算结果是准确的,进一步验证了该方法求解附加质量的可行性。
3 计算结果及分析
对所划分的计算域网格进行无关性验证后,开始流场计算,边界条件见 1.2.3节求解λ11时所得到的对应航行器对称面压力云图如图3所示。该图的本质是航行器做匀减速运动,参考表压力为零,由静压曲线图 4表明,航行器运动使流体有了速度动压,所以静压曲线会出现负值。从而可知头部高压至尾部的压力恢复,头部为滞止点,压力高,计算流体有粘性及粘性损耗,尾部压力无法恢复至与头部相同的压力,形成压差阻力。图3表明,求解λ11的原理与源项法及动网格法相近,均为求解非定常直线运动与定常直线运动受力,作差求解λ11。
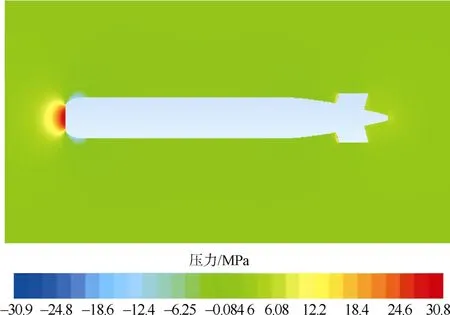
图3 航行器水平运动压力云图Fig. 3 Pressure contour of an undersea vehicle in horizontal motion

图4 航行器水平运动轴向压力特性曲线Fig. 4 Characteristic curve of axial pressure of an undersea vehicle in horizontal motion
而根据数值计算得到的仿真结果得出,不同的加速度计算附加质量有 2%~5%的误差,为了消除系统误差,保证结果的准确性,选取不同的初速度和加速度,即对多个不同运动工况进行求解,得到多个附加质量参数λ11,文中提到附加质量参数只与形状运动方向有关,与速度大小无关,附加质量参数λ11进行算术平均,如表4所示。
求解λ22,λ33以及λ26相关的压力云图如图5所示,边界条件见 1.2.3,向z侧移动,赋予航行器z向平移速度,航行器壳体的表面静压压力特性曲线如图6所示。压力特性曲线中出现负值,是因为航行器运动过程中使水有了速度(0.4~0.6 m/s),而参考表压力设置为零,水有了动压,因此在参考表压力为零的情况下,静压出现了负值。一侧高压,一侧低压,流体依旧有粘性及粘性损失,与求解λ11时相同,对多组工况进行求解,得到附加质量参数λ22,λ33以及λ26的算术平均值(见表 4)。

表4 航行器附加质量求解结果Table 4 Calculation results of undersea vehicle′s additional mass

图5 航行器侧向运动压力云图Fig. 5 Pressure contour of an undersea vehicle in lateral motion

图6 航行器侧向运动轴向压力特性曲线Fig. 6 Characteristic curve of axial pressure of an undersea vehicle in lateral motion
求解λ55,λ66以及λ35得到的压力云图如图 7所示,边界条件见1.2.3节,直接赋予航行器角速度与角加速度即可,航行器壳体表面的静压压力特性曲线如图8所示。运动为绕航行器浮心位置转动壳体一侧的压力不相等,航行器头部受到流体作用的一个低头力矩,航行器尾部受到一个抬尾力矩,壳体需要克服逆时针的旋转力矩,同求解λ11过程,需要选取不同角速度与角加速度的工况,经过求解,得到多个附加质量参数λ55,λ66以及λ35的仿真结果,为了消除系统的误差,最终得到各个附加质量参数对应的算术平均值(见表4)。

图7 航行器绕浮心转动压力云图Fig. 7 Pressure contour of an undersea vehicle rotating around center of buoyancy

图8 航行器绕浮心转动轴向压力曲线Fig. 8 Characteristic curve of axial pressure of an undersea vehicle rotating around center of buoyancy
对该复杂外形航行器的附加质量用文中方法进行解算得到的结果中,可得结论: 在附加质量主要的几个参数,λ22,λ33,λ26,λ55,λ66,λ35结果都是满意的,再次验证了该方法的求解附加质量精度相当高,并且相比较前人的相对运动法和动网格方法,求解效率有了质的变化。
4 结束语
文中基于运动参考系的思想,将边界与研究对象固定为体坐标系,流域与地面坐标系绑定,边界与研究对象共同运动,边界控制选取与速度无关的方程,湍流模型离散成与边界控制相对的方程,得到了一套完整的水下航行器附加质量计算方法。
文中基于运动参考系和 k-epsilon湍流模型建立了一种适应性强、精度高的水下运动体全部附加质量参数解算方法。采用该方法,计算椭球和圆柱2种标准模型的附加质量具有较高的精度,相对误差不超过 2%; 对于有附体水下航行器等比例模型,文中方法的计算精度与标称值[16]误差不超过10%。
文中避免了采用相对运动法需要添加动量源项以及不同附加质量求解需要重新划分网格的问题,也避免了动网格需要网格更新而带来的计算缓慢,网格质量难以保证的问题,解决了传统水下航行器附加质量求解难度大、计算效率低的问题。
[1] 周景军,李育英. 一种水下航行体附加质量数值计算方法[J]. 鱼雷技术,2013,21(4): 246-249.Zhou Jing-jun,Li Yu-ying. A Numerical Computation Method of Additional Mass for Underwater Vehicle[J].Torpedo Technology,2013,21(4): 246-249.
[2] 姚保太,康宁,郑伟奇. 变加速运动圆球附加质量和阻力仿真分析[J]. 计算机辅助工程,2014,23(3): 82-87.Yao Bao-tai,Kang Ning,Zheng Wei-qi. Simulation and Analysis on Added Mass and Drag of Varying Accelerated Motion Ball[J]. Computer Aided Engineering,2014,23(3): 82-87.
[3] 傅慧萍,李杰. 附加质量CFD计算方法研究[J]. 哈尔滨工程大学学报,2011,32(2): 148-152.Fu Hui-ping,Li Jie. Numerical Studies of Added Mass Based on the CFD Method[J]. Journal of Harbin Engineering University,2011,32(2): 148-152.
[4] 王鹏,宁腾飞,杜晓旭,等. 带复杂外形附体的AUV流体动力数值计算[J]. 兵工学报,2013,34(2): 223-228.Wang Peng,Ning Teng-fei,Du Xiao-xu,et al. Numerical Calculation of Hydrodynamics of AUV with the Complex Shape Appendage[J]. Acta Armamentarii,2013,34(2):223-228.
[5] 王鹏,翟继莹,宁腾飞. 带复杂外形附体的 AUV 旋臂水池数值计算[J]. 西北工业大学学报,2013,31(5):764-769.Wang Peng,Zhai Ji-ying,Ning Teng-fei. Calculating Rotary Derivatives of AUV with Complex Shape Appendages[J]. Journal of Northwestern Polytechnical University,2013,31(5): 764-769.
[6] Causin P,Gerbeau J F,Nobile F. Added Mass Effects in the Design of Partitioned Algorithms for Fluid-Structure Problems with Application to Blood Flows[J]. Computer Methods in Applied Mechanics & Engineering,2005,194(42-44): 4506-4527.
[7] Lu L,Yang Y R,Li P,et al. Added Mass,Added Stiffness and Added Damping Coefficients for a Parallel Plate-Type Structure[J]. Applied Mechanics & Materials,2011,66-68: 1738-1742,2011.
[8] Zhu J,Lin Z,Liu Q,et al. Calculation of the Added Mass of a Liquid Tank′s Bulkheads[J]. Journal of Marine Science and Application,2014,13(1): 41-48.
[9] He C,Duan Z,Ou J,et al. Coefficients of Added Mass/damping of a Low-mass-damping-ratio Cylinder Subjected to Vortex-induced Vibration[C]//第十四届中国海洋(岸)工程学术讨论会论文集(上册). 呼和浩特: 中国海洋,2009.
[10] Wang K,Zhang X,Zhang Z Q,et al. Numerical Analysis of Added Mass and Damping of Floating Production,Storage and Offloading System[J]. Acta Mechanica Sinica,2012,28(3): 870-876.
[11] Watts P B,Jensen R L,David M,et al. Vertical Hand Force and Forearm Emg during a High-step Rock-on Climbing Move With and without Added Mass[J].Medicine & Science in Sports & Exercise,2005,37(S5):S122.
[12] 冯双双,魏晓娟,孙磊,等. 流场中沿轴向运动圆柱的附加质量计算[J]. 计算机辅助工程,2015,24(2): 42-46.Feng Shuang-shuang,Wei Xiao-juan,Sun Lei,et al.Calculation on Added Mass of Cylinder Moving along Its Axis in Flow Field[J]. Computer Aided Engineering,2015,24(2): 42-46.
[13] 刘丹,王晓亮,单雪雄. 平流层飞艇的附加质量及其对飞艇运动的影响[J]. 计算机仿真,2006,23(6): 52-56.Liu Dan,Wang Xiao-liang,Shan Xue-xiong. Added Mass to Stratospheric Airship and Its Effect on Motion[J].Computer Simulation,2006,23(6): 52-56.
[14] 刘成刚. 潜艇附加质量计算及其水中振动特性研究[D].哈尔滨: 哈尔滨工程大学,2011.
[15] 马烨,单雪雄. 数值计算复杂外形物体附加质量的新方法[J]. 计算机仿真,2007,24(5): 75-78.Ma Ye,Shan Xue-xiong. A New Numerical Computation Method for Added Masses of Complicated Object[J].Computer Simulation,2007,24(5):75-78.
[16] 严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社,2005: 238.
Numerical Calculation of Additional Mass for Undersea Vehicle
MO Hui-xia,DANG Jian-jun,LUO Kai,HUANG Chuang,HUANG Biao
(School of Marine Science and Technology,Northwestern Polytechnical University,Xi′an 710072,China)
Additional mass force on undersea vehicle is a fluid inertia force due to unsteady motion,which is difficult to obtain from experiment or numerical calculation. In this paper,an unsteady flow field calculation model of an undersea vehicle is presented in the moving coordinates system by making use of the 3D N-S equation and the k-epsilon turbulence model. The proposed model is verified by inertia force solutions of ellipsoid and circular cylinder models. Then,based on the present numerical method,the additional mass of an undersea vehicle is calculated. Simulation results show that the relative errors of the obtained additional mass are less than 10%. This numerical calculation method of additional mass may be helpful to the overall design and hydrodynamic calculation of an undersea vehicle.
undersea vehicle; additional mass; moving coordinates system; numerical simulation
TJ630.1; O351.2
A
2096-3920(2017)03-0250-06
莫慧黠,党建军,罗凯,等. 水下航行器附加质量数值计算方法[J]. 水下无人系统学报,2017,25(3): 250-255.
10.11993/j.issn.2096-3920.2017.03.006
2017-03-31;
2017-05-25.
国家自然科学基金项目(51579209、51409215、51679202).
莫慧黠(1992-),男,在读硕士,主要研究方向为水下航行器流体动力仿真与动力机械仿真.
(责任编辑: 许 妍)
