基于Pareto最优的翼身融合水下滑翔机结构优化设计
2017-11-04何衍儒宋保维曹永辉
何衍儒,宋保维,曹永辉
(西北工业大学 航海学院,陕西 西安,710072)
基于Pareto最优的翼身融合水下滑翔机结构优化设计
何衍儒,宋保维,曹永辉
(西北工业大学 航海学院,陕西 西安,710072)
为进一步优化翼身融合水下滑翔机结构,使用基于Kriging代理模型的非支配排序多目标遗传算法(NSGA-II)对翼身融合水下滑翔机机身结构进行了质量和变形的多目标优化设计。最大等效应力和屈曲系数被设定为约束条件。首先使用UG二次开发程序实现翼身融合水下滑翔机结构的参数化建模,然后通过 ANSYS软件进行分析,得到水下滑翔机的结构性能,最后通过数次迭代得到该多目标优化问题的Pareto最优解集,使用逼近于理想值的排序法(TOPSIS)获得Pareto前沿上的权衡最优设计点。该优化流程对翼身融合水下滑翔机机身结构优化设计具有一定工程参考价值。
水下滑翔机; 翼身融合; 多目标优化
0 引言
水下滑翔机[1]是一种新型的自主式水下航行器,它通过调节浮力来改变运动状态,并将机翼上的升力转换成推进力。与传统的螺旋桨推进的水下航行器相比,水下滑翔机具有出色的流体动力性能和巡航能力,适用于长距离和长时间的部署。常规的水下滑翔机结构是装配鳍和舵的旋转体,具有较大的体积和较高的抗压能力,如Spray[2]和Seaglider[3]。
近年来,为了获得更高的水动力效率,翼身融合概念被逐渐用于水下滑翔机的设计。这种构造在机翼和机身之间没有明确的分隔线,提供了更高的升阻比和更低的沾湿面积与容积比。Jenkins[4]等人充分研究了翼身融合水下滑翔机的可行性。翼身融合设计模型“Liberdade XRAY”是世界上已知的最大水下滑翔机。ZRAY[5]水下滑翔机是基于XRAY水下滑翔机的改进型,于2010年3月完成,干重约725.75 kg(1 600 lb),机翼跨度6.1 m,巡航范围1 200~1 500 km,最大升阻比为20,操作深度为300 m。孙春亚[6]等设计了翼身融合水下滑翔机的外形3D模型,并进行了优化。
由于有限元分析需要大量的计算模拟,现实中没有足够的资源来分析所有的变量组合,解决上述问题的一个有效方法就是构造代理模型。代理模型优化过程包括3个步骤: 1) 选择采样点; 2)构造替代模型; 3) 优化并加入新的采样点。使用实验设计方法可以在较少采样点的条件下获得更好的初始代理模型,常见的实验设计方法有正交试验采样、拉丁超立方体采样、优化拉丁超立方体采样,构造替代模型的方法有多项式响应面法、径向基函数法、kriging方法以及支持向量回归法。
先前的研究人员已经提出了许多不同的方法来解决多目标优化问题。Srinivas和 Deb提出了基于 Pareto方法的非支配排序遗传算法(nondominated sorting genetic algorithm,NSGA-II);Coello等扩展基本的粒子群优化方法,提出了多目标粒子群优化算法(multi-objective particle swarm optimization,MOPSO)。通过这些优化算法可以找到Pareto最优解,使用映射法(mapping method)、最接近理想点法(nearest to ideal point)、逼近于理想值的排序法(technique for order preference by similarity to an ideal solution,TOPSIS)等方法可以在Pareto前沿上找到一些折中目标函数的权衡最优设计点。
文章研究了基于Pareto最优的翼身融合水下滑翔机结构优化设计。首先使用UG二次开发程序完成翼身融合水下滑翔机结构的参数化建模;然后使用有限元分析软件ANSYS对滑翔机结构进行分析,并将分析结果导入 MATLAB,使用基于Kriging代理模型的NSGA-II多目标优化方法对分析结果进行优化,产生下一代设计变量; 经过反复的迭代,获得了滑翔机结构优化问题的Pareto最优解; 最后使用 TOPSIS方法在 Pareto前沿上取得权衡最优设计点,并与Pareto前沿上其余的最优设计点进行了对比分析。
1 参数化建模
翼身融合水下滑翔机可分为 2部分: 机翼部分和机身部分,两者都具有类似的框架结构,包含肋和梁,这种结构的水下滑翔机具有扁平形状,压缩能力差,因此采用内外压力相等的非密封结构。在确定了机翼和机身的受力形式之后,就可以确定结构组件的布局。翼身融合水下滑翔机结构的 3D建模过程比较复杂,可采用各部件分块建模,并通过布尔运算生成整个模型的方法建立结构模型,生成结构3D模型的流程图如图1所示。
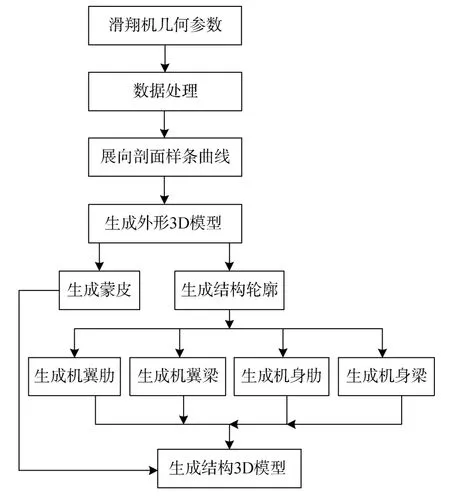
图1 翼身融合水下滑翔机结构3D模型生成流程图Fig. 1 Generation of three-dimensional model of BWB underwater glider structure
主要步骤如下:
1) 通过 MATLAB调用外形设计参数,得到一系列离散点坐标,并保存到DAT文件中;
2) 根据离散点坐标,生成滑翔机外形的 3D模型;
3) 根据蒙皮的厚度将滑翔机的外表面向里偏置,得到结构的边界轮廓;
4) 由结构布置参数确定机翼肋的个数和位置,在对应位置建立平面,求得与外形的交线S1,拉伸曲线S1并与现有实体求交,即可生成机翼肋,同理可以生成机翼梁;
5) 由结构布置参数确定机身肋的个数和位置,在对应位置建立平面,求得与外形的交线S1,然后根据机身肋的厚度偏置曲线S1得到曲线S2,拉伸曲线S1和S2并求差,即可生成机身肋,同理可以生成机身梁;
6) 对上述步骤中生成的各组件进行装配,得到滑翔机的整体结构。
翼身融合水下滑翔机的外形由多个横截面翼型通过曲线组生成,具体的 3D视图如图 2(a)所示; 内部的框架结构根据上述的步骤生成,详细结构如图2(b)。
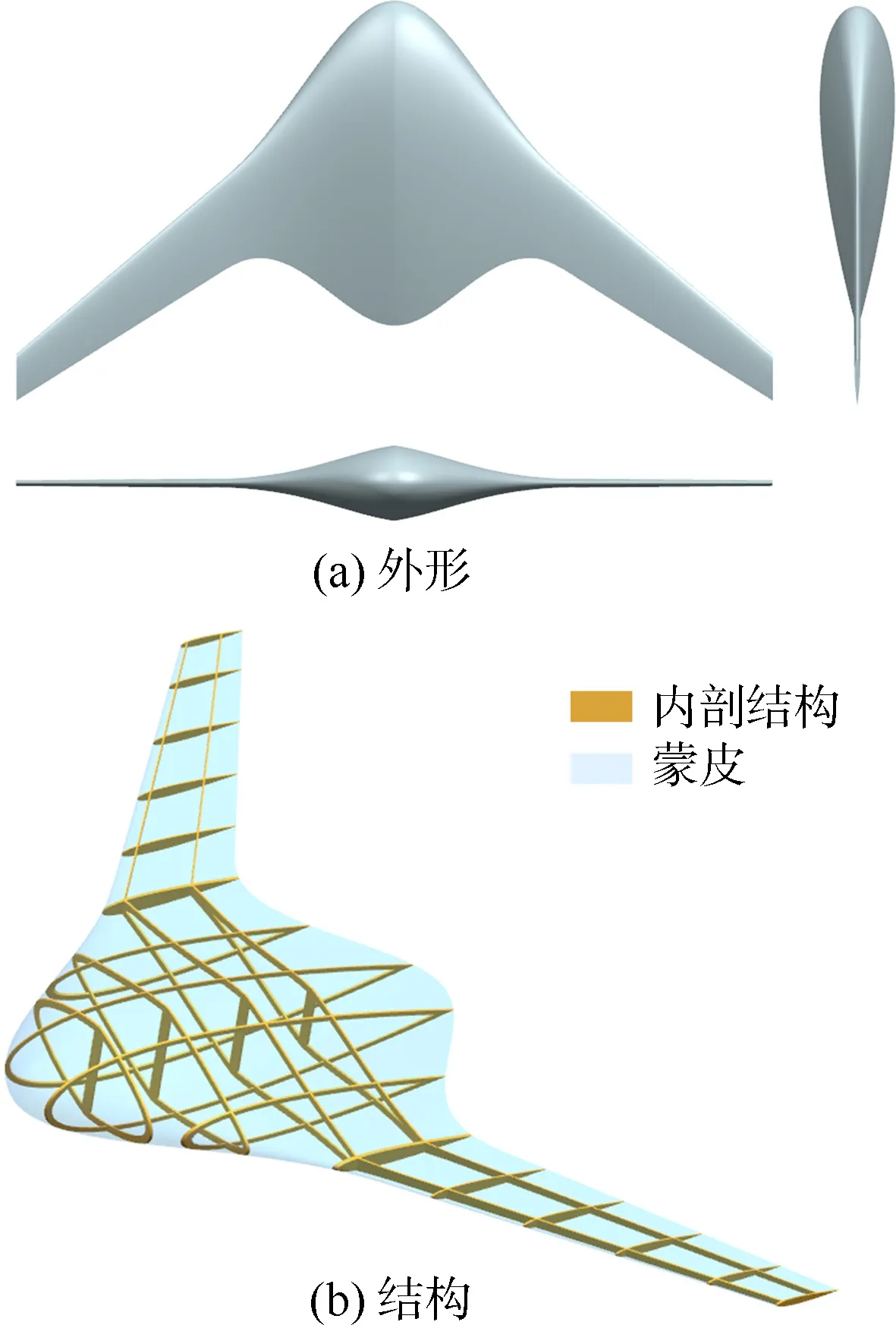
图2 翼身融合水下滑翔机Fig. 2 BWB underwater glider
2 基于Kriging代理模型的NSGA-II
2.1 多目标优化
多目标优化[7]也称为多准则优化或矢量优化,用于找到满足约束值并且所有目标函数达到最优的决策向量解集。不失一般性,它可以定义为
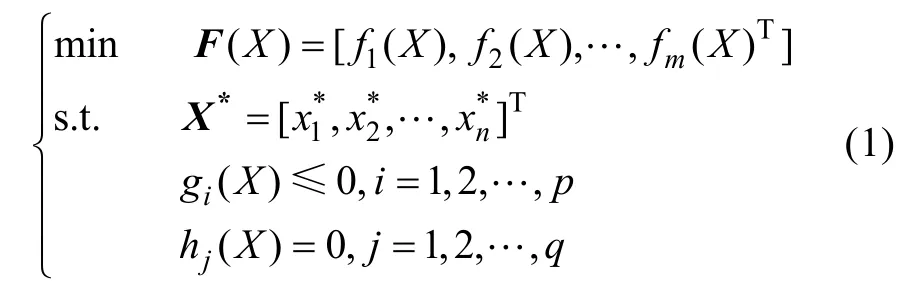
式中:X*⊂Rn为决策向量;F(X)⊂Rm为目标向量;gi(X)为第i个不等式约束;hi(X)为第j个等式约束。多目标优化问题往往包含多个甚至无穷个优化解,几个关于多目标优化问题的基本概念定义如下。
1) Pareto占优。对于任意向量U=[u1,u2,…,um]∈Rm和V=[v1,v2,…,vm]∈Rm,当且仅当∀i∈{1,2,…,m}∶ui≤vi∧∃j∈{1,2,…,m}∶uj<vj满足时,称V比U占优,又称V支配U,记做U≺V。
2) Pareto最优解。Ω是Rm中满足约束条件的可行区域,对于点X*∈Ω,当且仅当 ∀i∈{1,2,…,m},∀X∈Ω-{X*}∶fi(X*)≤fi(X)∧∃j∈{1,2,…,m}∶fi(X*)<fi(X)满足时,称X*为该问题的Pareto最优解。
3) Pareto最优解集。对于给定的多目标优化,Pareto最优解集是由所有Pareto最优解组成的集合,即PS*={X∈Ω|∃X′∈Ω:F(X′)≺F(X)}。
4) Pareto前沿。Pareto前沿是Pareto最优解集PS*中使用决策变量获得的目标函数集合,即PF*={F(X)=(f1(X),f2(X),…,fm(X)):X∈PS*}。
2.2 Kriging代理模型
Kriging[8]是一种使用广义高斯方程作为基函数的特殊形式径向基函数插值方法,该方法是根据样本空间的位置不同与样本间相互关联程度而不同,对每个样本赋予不同的权,进行滑动加权平均,用来估计未知空间的样本信息。Kriging预测和均方误差(mean square error,MSE)是Kriging在工程上应用的2个重要公式:

2.3 非支配排序多目标遗传算法(NSGA-II)
NSGA-II多目标优化算法[9]是一种经典的多目标优化算法,有自身独特的约束处理方法。该方法不仅能获得均匀分布的Pareto最优解集,而且有很强的稳定性和适应性,具体步骤如下。
1) 随机生成大小为n的初始种群P0,进行快速非支配分层排序;
2) 对种群P0实现选择、交叉和变异操作,产生大小为n的新种群Q0;
3) 将种群P0和Q0合并形成大小为2n的混合种群C0,并对种群C0进行快速非支配分层排序;4) 根据C0的非支配解生成新一代父代种群P1;5) 重复步骤2)~4)直到达到最大代数。
2.4 基于Kriging代理模型的多目标遗传算法
为了解决翼身融合水下滑翔机多目标结构优化的效率问题,文中应用了基于 Kriging代理模型的NSGA-II多目标优化方法,具体的优化流程如图3所示。

图3 基于Kriging代理模型的NSGA-II多目标优化方法流程图Fig. 3 Flow chart of multi-objective optimization method with Kriging surrogate model based NSGA-II
3 逼近于理想值的排序方法
通过基于Kriging代理模型的NSGA-II优化方法获得的Pareto前沿给出了一组非支配设计点,有必要采用一些方法在Pareto前沿上选择权衡最优设计点。TOPSIS方法[10]对每个目标函数应用权重因子,并且根据这些权重因子选出一个点,包含以下几个步骤。
1) 确定目标函数(S)的值和每个目标函数(W)的权重因子。Sij表示第j个目标函数的第i个最优点。Wj表示第j个目标函数的权重因子,其必须满足

2) 归一化Sij

3) 将归一化矩阵的元素乘以相关权重因子

4) 根据以下等式找到S-和S+的值


6) 计算每个Pareto曲线的相对精度

7) 选择Hi的最大值H,并将H用来确定目标函数值和对应的最优设计变量。
4 翼身融合水下滑翔机结构优化设计
翼身融合水下滑翔机结构的重量和变形的多目标优化问题可以定义为如下形式
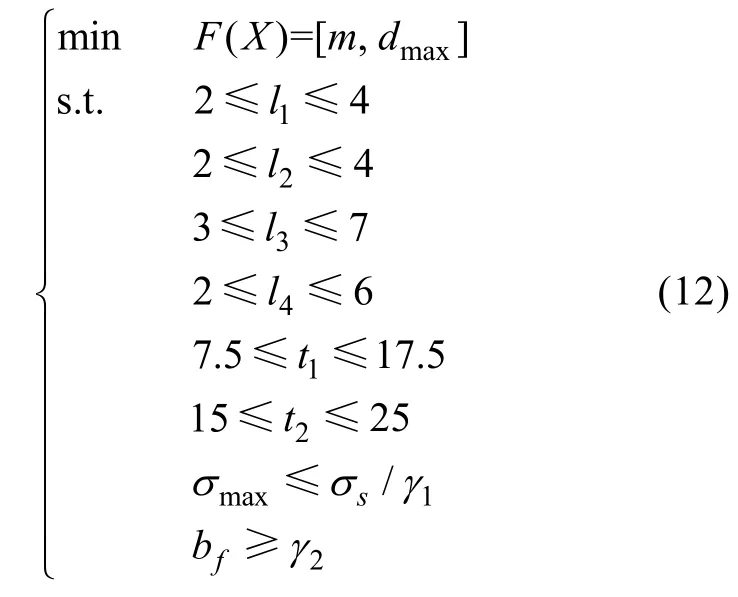
式中:m=ρV是结构的质量;dmax是结构的最大变形;l1表示机翼肋的宽度;l2表示机翼梁的宽度;l3表示机身肋的宽度;l4表示机身梁的宽度;t1表示机身梁的厚度;t2表示机身肋的厚度;σmax为最大等效应力;bf为屈曲系数;σs为材料的屈服极限;应力安全系数γ1=1.2; 屈曲安全系数γ2=1.2。文中材料选用结构钢,屈服极限σs=330 MPa,杨氏模量E=200 GPa,泊松比为µ=0.3,密度为ρ=7.85×103kg/m3。
由于翼身融合水下滑翔机是完全对称的,为了减少计算成本,取滑翔机的一半进行有限元分析。设置滑翔机的对称平面为有限元模型的边界约束,约束类型是固定约束。
水下滑翔机外形采用 NACA翼型(美国国家航空咨询委员会(national advisory committee for aeronautics,NACA)开发的一系列翼型)生成,最大弦长为1 m,展长为2.5 m。载荷分为3部分: 1)流体作用力,分布在滑翔机的上下蒙皮上力,水下滑翔机的航行速度为1.5 m/s,经过流体动力计算,阻力大约为 100 N,在来流方向上作用在水下滑翔机的表面; 2) 自身结构重量; 3) 搭载设备的重量为150 kg,主要的设备通过固定装置固定在滑翔机的框架结构上。
优化拉丁超立方采样能使所有的试验点尽量均匀地分布在设计空间,具有非常好的空间填充性。因此,文中使用优化拉丁超立方采样法构造初始的代理模型。首先,通过优化拉丁超立方采样方法选取 60组设计变量作为初始样本点,并运用ANSYS对这60组点进行有限元分析,计算每个样本点的最大等效应力、最大变形和屈曲系数,构造初始的 Kriging代理模型; 然后使用NSGA-II每一代产生30组新的设计变量,进行有限元分析,并将所获得的值返回到 MATLAB,重新构造Kriging代理模型。经过10次迭代取点,进行了360次有限元分析计算后,Pareto前沿接近不变,判定当前解满足收敛条件,停止迭代,得到该优化问题Pareto前沿。图4分别显示了第1次、第4次、第7次和第10次迭代后的Pareto前沿。

图4 迭代后的Pareto前沿Fig. 4 Pareto front after iteration
Pareto前沿和所有有限元分析解的叠加图如5所示。
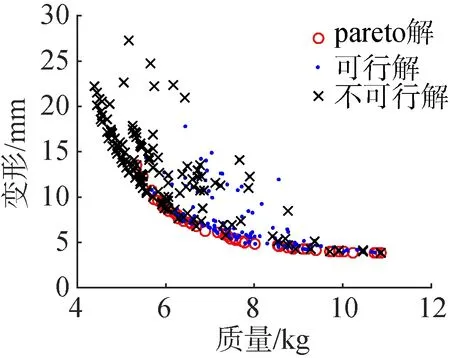
图5 Pareto前沿和所有有限元分析解Fig. 5 Pareto front and all finite element analysis solutions
第 10次迭代后,使用当前所有的采样点对优化目标函数: 结构质量和变形分别构造Kriging代理模型。新产生30组采样点的代理模型预测值与实际有限元计算值如图6所示。
可以发现,实际有限元分析值和预测值的偏差不大,这也证明了代理模型的准确性,可以进一步地用于优化设计。为了评估代理模型的精度问题,可以使用generational distance(GD)函数


图6 代理模型预测值与有限元计算值的对比图Fig. 6 Comparison between surrogate model prediction and finite element analysis
式中:t为非支配解的数目;disi为第i个点的预测值和有限元计算值的偏差。从第1次构建代理模型开始,到第10次结束迭代,可以用每一代的代理模型对30组点进行预测,并计算GD函数,得到如图7所示曲线。
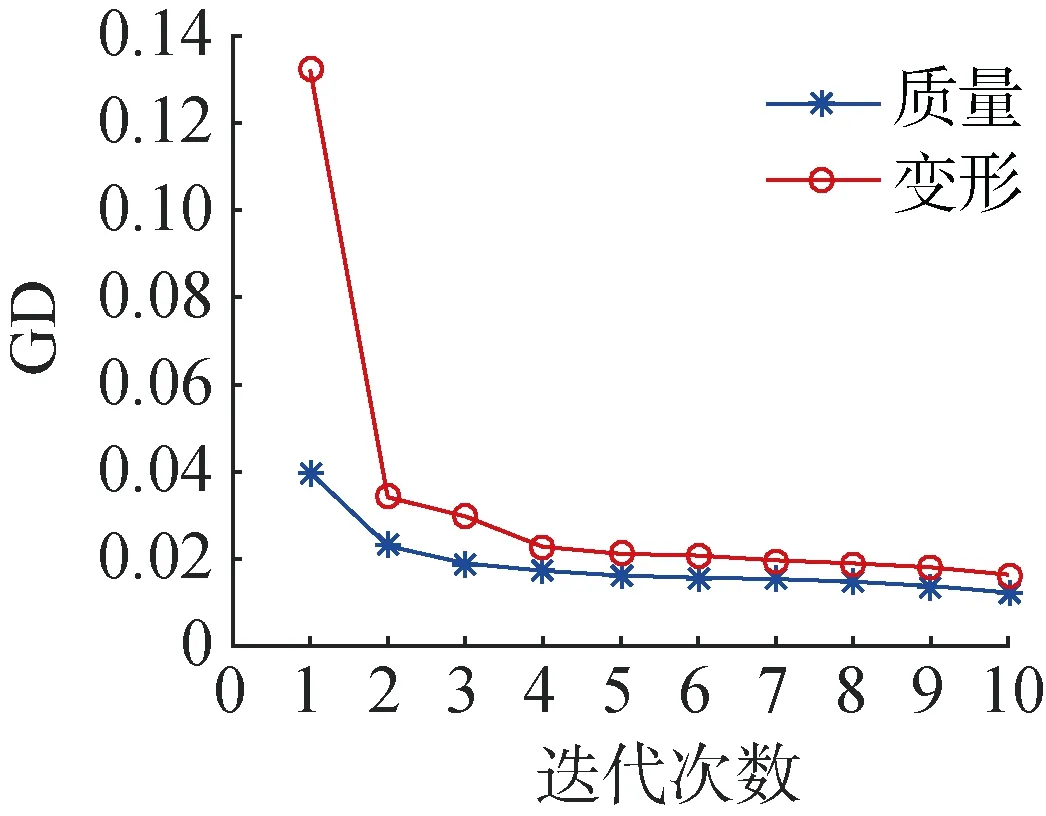
图7 GD函数值随迭代次数变化曲线Fig. 7 Variation of generational distance function value with number of iterations
可以发现,初始代理模型的GD函数值较大,随着迭代次数的增加,GD函数值逐渐减小,这也证明了代理模型的精确度逐渐升高。同时,随着迭代次数的增加,GD函数值减小的趋势减缓,代理模型趋于稳定。
选取A、B、C、D、E共5个Pareto最优设计点,它们相对应代理模型(surrogate model,SM)预测和实际有限元分析(finite element analysis,FEA)的设计变量、目标函数值、约束函数值如表1所示。其中,最优设计点A和E分别代表最小的质量和最小的变形;C是通过TOPSIS方法获得的权衡最优设计点,2个目标的权重因子均设为0.5; 此外,B和D也是Pareto前沿上比较重要的最优设计点。

表1 最优设计点及其相对应的目标函数值和约束函数值Table 1 Optimum design points and corresponding objective function value and constraint function value
对比有限元分析值和代理模型预测值可知,质量和变形的代理模型精确度很高,相对而言,等效应力和屈曲系数的代理模型精确度低了一些。
相对于最优设计点A,最优设计点B在结构质量增加了11.8%的同时变形减少了44.04%; 相比于最优设计点E,最优设计点D在变形增加了11.43%的同时质量减少了18.45%。由此可以发现,尽管最优设计点A和E分别代表最小的质量和最小的变形,但是最优设计点B和D优于最优设计点A和E。
相比于最优设计点B,权衡最优设计点C在结构质量增加了 11.88%的同时,变形减少了28.74%; 相比于最优设计点D,权衡最优设计点C在变形增加了12.33%的同时,质量减少了15.65%。由此可以发现,权衡最优设计点C优于最优设计点B和D。这也证明了 TOPSIS方法的有效性。5个 Pareto最优设计点的对比图如图8所示。
图9给出了权衡最优设计点C的有限元分析结果,它的等效应力、变形和屈曲系数分别如图9所示。

图8 5个最优Pareto设计点对比Fig. 8 Comparison among five optimum Pareto design points
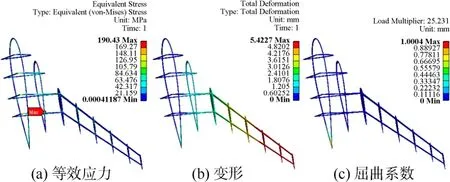
图9 权衡最优设计点C的结构分析结果Fig. 9 Finite element analysis results of trade-off optimum design point C
5 结论
文中通过MATLAB软件,结合UG二次开发程序,通过 ANSYS有限元分析,以及基于Kriging代理模型的NSGA-II多目标优化方法,实现了翼身融合水下滑翔机框架结构的多目标优化设计,主要结论如下。
1) 通过 UG二次开发程序完成了翼身融合水下滑翔机框架结构的参数化建模。
2) 准确有效地获得了该优化问题的 Pareto前沿。迭代次数达到10次以后,Pareto前沿基本不变,再进行迭代意义不大。
3) 可以根据实际情况所需,选定不同的权重因子,在Pareto前沿上获取相对应的设计点。
4) 该优化流程对于解决带约束的非线性多目标优化问题具有较好的工程参考价值。
[1] Bachmayer R,Leonard N E,Graver J,et al. Underwater Gliders: Recent Developments and Future Applications[C]//Tapei: IEEE International Symposium on Underwater Technology(UT'04),2004.
[2] Sherman J,Davis R,Owens W B,et al. The Autonomous Underwater Glider “Spray”[J]. IEEE Journal of Oceanic Engineering,2001,26(4): 437-446.
[3] Eriksen C C,Osse T J,Light R D,et al. Seaglider: a Long-range Autonomous Underwater Vehicle for Oceanographic Research[J]. IEEE Journal of Oceanic Engineering,2001,26(4): 424-436.
[4] Jenkins S A,Humphreys D E,Sherman J,et al. Underwater Glider System Study[J]. Scripps Institution of Oceanography,2003,84(2169): 83.
[5] Hildebrand J A,'Spain G,Roch M A,et al. Glider-based Passive Acoustic Monitoring Techniques in the Southern California Region[J]. Sea Technology,2009(1): 28-32.
[6] Sun C,Song B,Wang P,et al. Parametric Geometric Model and Shape Optimization of an Underwater Glider with Blended-wing-body[J]. International Journal of Naval Architecture and Ocean Engineering,2015,7(6):995-1006.
[7] Jie H,Wu Y,Zhao J,et al. An Efficient Multi-objective PSO Algorithm Assisted by Kriging Metamodel for Expensive Black-box Problems[J]. Journal of Global Optimization,2017,67(1-2): 399-423.
[8] Dong H,Song B,Dong Z,et al. Multi-start Space Reduction (MSSR) Surrogate-based Global Optimization Method[J]. Structural & Multidisciplinary Optimization,2016,54(4): 907-926.
[9] Wang X D,Hirsch C,Kang S,et al. Multi-objective Optimization of Turbomachinery Using Improved NSGA-II and Approximation Model[J]. Computer Methods in Applied Mechanics & Engineering,2011,200(9): 883-895.
[10] Opricovic S,Tzeng G H. Compromise Solution by MCDM Methods: A Comparative Analysis of VIKOR and TOPSIS[J]. European Journal of Operational Research,2004,156(2): 445-455.
Structure Optimization Design for Underwater Glider with Blended-Wing-Body Based on Pareto Optimal Solution
HE Yan-ru,SONG Bao-wei,CAO Yong-hui
(School of Marine Science and Technology,Northwestern Polytechnical University,Xiʹan 710072,China)
Multi-objective optimization of underwater glider with blended-wing-body(BWB) is carried out in terms of the mass and deformation of structure by employing the non-dominated sorting genetic algorithm(NSGA-II).The Maximum equivalent stress and bulking factor are taken as the constraint conditions. Parametric modeling of the BWB underwater glider structure is implemented using UG secondary development and finite element analysis is performed to obtain the structural performance of the underwater glider via the commercial computational structural mechanics software ANSYS. Finally,the Pareto optimal solution set of this multi-objective optimization problem is obtained by several iterations,and the technique for ordering preferences by similarity to ideal solution(TOPSIS) is used to obtain some trade-off optimum design points from Pareto fronts. This optimization process may provide a reference for structure optimization design of BWB underwater glider.
underwater glider; blended-wing-body; multi-objective optimization
TJ630.3; N945.15
A
2096-3920(2017)03-0243-07
何衍儒,宋保维,曹永辉. 基于Pareto最优的翼身融合水下滑翔机结构优化设计[J]. 水下无人系统学报,2017,25(3): 243-249.
10.11993/j.issn.2096-3920.2017.03.005
2017-05-19;
2017-06-15.
国家自然科学基金资助项目(51375389).
何衍儒(1988-),男,在读博士,主要研究方向为结构优化设计.
(责任编辑: 陈 曦)
