电动汽车永磁同步电机弱磁控制策略研究
2017-11-02周凯杰曹培培吕康飞
周凯杰, 曹培培, 吕康飞
(淮阴师范学院 物理与电子电气工程学院, 江苏 淮安 223300)
电动汽车永磁同步电机弱磁控制策略研究
周凯杰, 曹培培, 吕康飞
(淮阴师范学院 物理与电子电气工程学院, 江苏 淮安 223300)
永磁同步电机中的永磁体产生的磁场不可调节,受电动汽车车载电压所限,提高转速,增大调速范围,需要进行弱磁控制.基于永磁同步电机的数学模型,在基速以下采用MPTA(最大转矩)进行控制,基速以上通过弱磁控制,通过电流调节器的输出电流与限制电流比较,得到弱磁控制量,从而实现增大调速范围.实验通过MATLAB/Simulink下搭建仿真模型,结果验证了该方法的可行性.
永磁同步电机; 弱磁控制; MPTA; 调速范围
0 引言
汽车作为当今世界上最普遍的交通工具,给人们的日常生活、工作带来极大的便利.但是,传统的燃油汽车发展加剧了对不可再生石油资源的依赖,汽车尾气的排放造成了环境的污染,引发温室效应和全球变暖,[1]. 近来国家工信部已启动制定我国燃油车停产停售时间表.在如此背景下,新能源汽车在全球范围内得到了迅速的发展,尤其是以车载电池为动力的电动汽车.在锂电池以及锌空气电池等应用,更加速了以特斯拉为首的电动汽车的发展.电动汽车以电池作为动力,将电能通过电机转化为机械能,从而驱动汽车前进.相比较传统燃油汽车,环境污染较小,有良好的发展前景.其中,电机的选择以及驱动系统的设计是决定电动汽车性能的关键因素之一[2].
永磁同步电机(PMSM)不同于传统的由电流励磁产生磁场,而是选用永磁体作为材料产生磁场,从而具有重量轻、体积小、惯性低、响应快、电机功率密度高、能量密度高、低速转矩密度高、效率高、可靠性高等显著特点,也因此成为电动汽车首选的电机.但是,永磁体产生的磁场是固定不能改变的,并且驱动电路输出最高电压又受到车载电源电压限制,电机转速无法继续增加. 为了提高电机性能,必须进一步提高电机转速,增大其调速范围,则需进行弱磁FW(Flux weaking)控制.永磁同步电机的励磁磁场是由永磁体产生,无法对其直接减弱以获取弱磁控制.永磁同步电机控制的基本思想是通过利用电机直轴电流分量形成去磁磁动势作用,从而减弱电机的气隙磁场,起到弱磁控制的作用[3].通过弱磁控制可以拓宽调速范围,但为了充分发挥驱动系统的性能,则有必要合理的设计弱磁控制的算法,从而最大限度的满足未来电动汽车的驱动需求[4].
本文基于永磁同步电机的数学模型以及约束条件,介绍了永磁同步电机的弱磁控制的基本原理以及控制策略,重点研究了电压闭环反馈法弱磁控制策略的3种实现方法,并采用第1种方法即通过调节直轴电流的大小来实现弱磁控制系统的设计,最后通过MATLAB软件中Simulink搭建了永磁同步电机弱磁控制系统的模型,并进行设计与仿真,仿真波形验证了控制策略的可行性.
1 永磁同步电机数学模型及其约束条件
1.1 PMSM的数学模型
永磁同步电机数学模型过于复杂,因此为了突出主要问题,便于分析,进行如下简化:1) 定子三相绕组采用空间对称的Y形连接,相位相差120°,气隙均匀并不计空间各次谐波;2) 假定铁心磁导率无穷大,忽略同步电机中的涡流损耗和磁滞损耗;3) 假设电机转子上不存在阻尼绕组,永磁体也不具有阻尼作用;4) 电机在气隙中产生的磁动势呈正弦分布.
当永磁同步电机处于稳态时,在dq旋转坐标系中,同步电机电压方程可表示为:
(1)
电磁转矩方程:
Te=p[ψfiq+(Ld-Lq)idiq]
(2)
机械运动方程:

(3)
式中:ud、uq分别为d轴和q轴定子电压;Rs为定子相绕组电阻;Ld、Lq为d轴和q轴等效的电感;ψf为永磁体的磁链;w为同步电机的(电)角速度;p是磁极对数;Te、TL为电机电磁转矩和负载转矩;J、F为电机的转动惯量和粘滞摩擦系数.
1.2 约束条件
如图1所示,在dq坐标系里,id、iq表示永磁同步电机的运行状态.采用最大转矩电流比(MTPA)控制方式时,当驱动永磁同步电机达到转折速度时,若要继续升高转速则要进行弱磁增速.由于PMSM磁场固定,只能通过改变定子电流减弱励磁磁场.由图1可见,MPTA控制运行在OA段属于恒转矩区间,转速达到基速以上时,给定的电流必须同时落在电流极限圆和电压极限椭圆内,方能实时跟踪,进行弱磁控制.根据定子电流状态将弱磁控制分为两个不同区域,即普通弱磁控制I区-AB段和最大输入功率弱磁控制II区-BC段.并且设计的永磁同步电机在满足一些约束条件下,才能实现弱磁控制.
当直流母线电压不变,此时由同步电机逆变器输出的定子电压最大值Usmax也是确定的;且定子绕组中最大的通过电流也是确定的Ismax.故而电机在弱磁控制时,定子电流is约束条件为:
(4)
忽略定子电阻压降,弱磁稳态工作时定子电压峰值为:

(5)
电压的约束条件可表示为:
(6)

图1 电压极限椭圆与电流极限圆
2 弱磁控制策略
永磁同步电机永磁体磁场确定后,交轴、直轴电感Ld、Lq已知.根据式(2)电磁转矩Te取决于交直轴电流id、iq.因此只需控制id、iq就可以控制电机的转矩,进而控制电机的转速.弱磁控制策略框图如图2所示,当同步电机转速在基速以下时,逆变器输出电压未达到饱和,电机调速通过控制逆变器输出电压进行控制;而在基速以上时,根据同步电机转速给定值与实际值的差值信号送给转速控制器,进而通过弱磁控制模块对交直轴电流id、iq进行控制,降低磁场的强度,从而增加同步电机的调速范围.
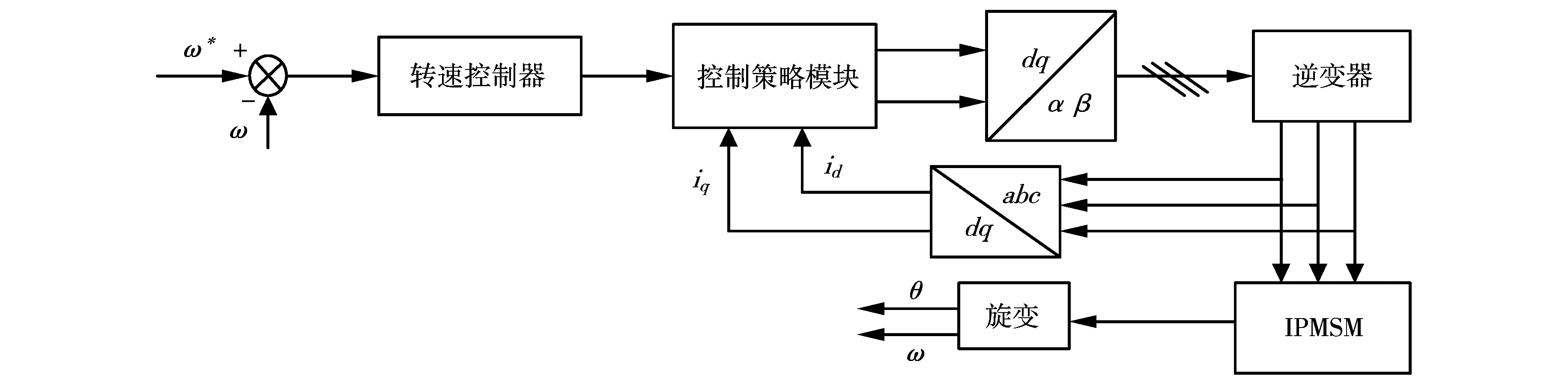
图2 弱磁控制策略框图
弱磁控制算法最优的目标是,在保证满足电动汽车驱动系统的要求下,最大限度地提供任意速度下最大的电磁转矩(出力最大)和最小的电流(损耗最小).根据同步电机运行状态,将其分3个阶段,即OA段、AB段、BC段,如图1所示.
1) 当电机转速处于基速以下时,输出转矩一定属于恒转矩阶段,采用MPTA控制,对应图1中OA段,则有:

(7)
将式(2)求偏导联合式(7)可得电流矢量控制方程:
(8)
2) 当电机转速超过基速运行时,将受到电压极限椭圆以及电流极限圆的限制,电机处于弱磁控制,即图中的AB段,此时的控制方程为:

(9)
3) 电机运行状态处于BC段时,通过式(8)、式(9)可计算出B点的转速ωB,进而求出电磁转矩Te.
3 系统仿真与分析
利用MATLAB/Simulink搭建仿真弱磁控制永磁同步电机的仿真模型,系统模型参数设置如表1所示.

表1 系统模型参数
仿真波形如图3~图5所示. 图3为电机转速仿真波形,从图中可以看出,当同步电机启动时经过1 s左右转速达到额定转速3 000 rad/s,进入稳定运行阶段,再经过0.5 s后,进行弱磁升速,即1.5~1.6 s之间为升速阶段,在1.6 s后电机稳定在5 800 rad/s.在同步电机启动与升速阶段,采用MPTA控制,此时电机的电磁转矩最大,当达到3 000 rad/s时稳态运行时,采用弱磁控制进行提速,额定转速高达5 800 rad/s.从图4、图5可以看出在启动和升速阶段,直轴、交轴电流暂态突变,当进入稳态运行时,电流波形稳定,尤其是在弱磁调速后,电流稳定.
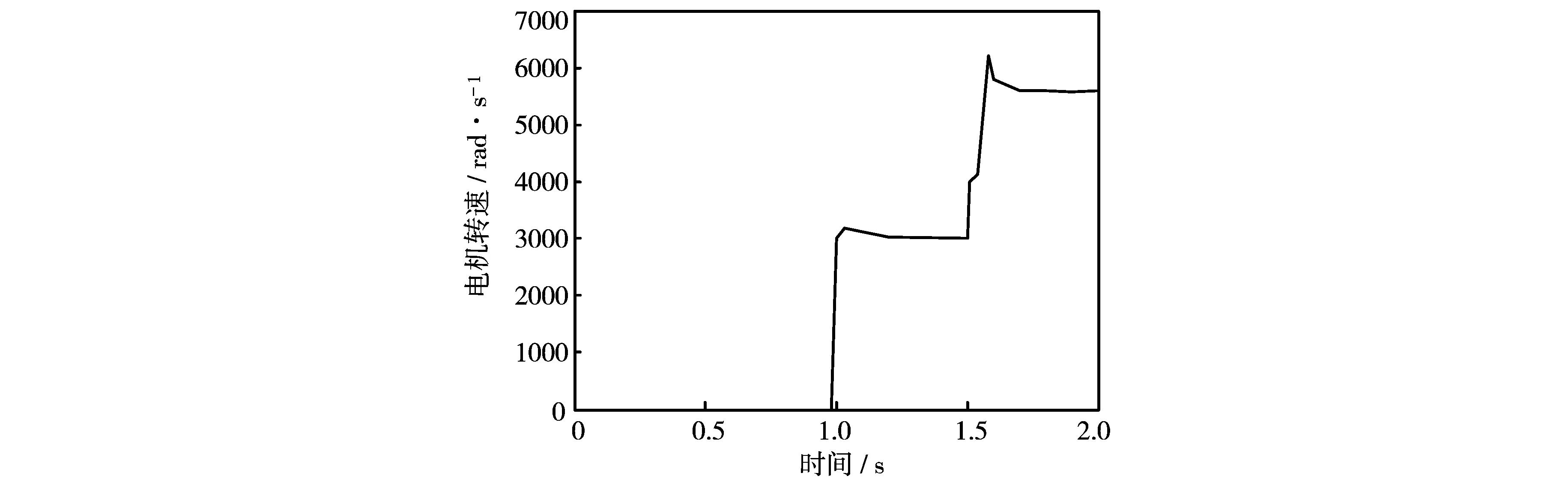
图3 同步电机转速波形
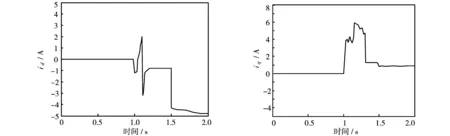
图4 直轴电流 图5 交轴电流
4 总结
基于永磁同步电机的数学模型,从弱磁控制原理出发,建立永磁同步电机弱磁控制系统,并利用MATLAB软件搭建永磁同步电机模型,并进行仿真验证.仿真结果表明,采用弱磁控制方案可以有效地增大电机调速范围,而且暂态性能以及稳态性能都较为优越,能满足电动汽车驱动系统的设计要求,具有实际的工程意义.
[1] 符荣. 电动客车永磁同步电机设计与参数研究[D]. 西安:西北工业大学, 2015.
[2] 康劲松,蒋飞,钟再敏,等. 电动汽车用永磁同步电机弱磁控制策略综述[J]. 电源学报,2017,15(1):15-22.
[3] 高润泽, 翟丽, 苏丽伟. 电动汽车内嵌式永磁同步电机全速弱磁控制方法研究[J]. 交通节能与环保,2016,12(5):20-28.
[4] 赵宇, 柴建云. 电动汽车用宽调速范围永磁磁阻电机优化设计研究[J]. 电工电能新技术,2007,26(1):43-46.
WeakMagneticControlofthePermanentMagnetSynchronousMotorbaseonElectricAutomobile
ZHOU Kai-jie, CAO Pei-pei, LV kang-fei
(School of Physics and Electronic Electrical Engineering, Huaiyin Normal University, Huaian Jiangsu 223300, China)
Because the magnetic fields produced by PMSM cannot be adjusted, and it has been limited by the voltage of the Electric Automobile, so in order to improve the speed of the PMSM, increasing the speed range, weak magnetic must be adopted. It is based on the mathematical model of PMSM. When it below the base speed, MPTA (maximum torque) is adopted to control; when it up the speed, weak magnetic is adopted to control. By comparing the output current of the regulator with the limiting current, the weak magnetic control amount is obtained and the range of speed adjustment is increased. The simulation model was built by MATLAB/Simulink, and the feasibility and correctness of this method were verified.
PMSM; weak magnetic control; MPTA; speed range
TM711
A
1671-6876(2017)03-0214-04
[责任编辑蒋海龙]
2017-05-09
淮安市科技支撑计划项目(HAG201607)
周凯杰(1985-),男,江苏宿迁人,讲师,硕士,研究方向谐波抑制与无功补偿. E-mail: honly998@163.com
