基于T-S模糊的纵向飞行模型簇LQG控制器设计
2017-11-02吴佳驹张超
吴佳驹,张超
航空工业第一飞机设计研究院,陕西 西安 710089
1985年,Sugeno和Takagi提出了Takagi-Sugeno模糊推理方法,称作T-S模糊系统模型[1]。其控制方法与分段模型簇存在一定的相似性,可有效地逼近广泛的一类非线性系统,从而为存在不确定性的系统提供了有效的解决方法,并在离散倒立摆系统和机械手操作中得到成功应用[2]。LQR即线性二次型经典最优控制算法,通过给出所需的最优性能指标,确定系统状态变量和控制变量的加权矩阵,为设计者提供设计空间,其控制理论已经成功应用于结构振动控制[3]。本文提出将T-S模糊模型和LQR控制算法相结合,应用于纵向飞行模型簇控制器设计,解决了状态、输入扰动下系统自动调稳功能。
基于上述反馈线性化思想和多变量模糊控制理论,本文首先通过反馈线性化将飞行器姿态运动方程进行线性化,同时实现各通道的解耦,然后对各控制通道设计基于T-S模糊模型的LQG控制器。以F/A-18模型参数为基础进行仿真,结果显示在状态、输入扰动下系统能自动调节到稳定状态。
1 F/A-18模型分析
给定水平无侧滑飞行条件φ=β=0和p=r=0,将F/A-18飞机运动方程解耦为不依赖于横侧向状态量(β,φ,ψ,p,r)的纵向运动,即纵向运动方程组简化为:
式中:h 为高度;m 为质量;v 为速度;Tm为发动机最大推S 为机翼面积为其平均空气动力弦;Iy为其转动惯量;CD、CL、Cm分别为飞机阻力矩系数、升力矩系数和俯仰力矩系数。
F/A-18飞机是一个多输入多输出的非线性系统,采用两台F414发动机,每个发动机的最大推力Tm=18000N。低空飞行时,一般取v<1000ft/s、h<2000ft,此处取v<500ft/s、h<1000ft(1ft≈ 0.3m,下同)。α=θ,β=0,γ=α-θ=0。
输入为油门杆dt、舵偏角de。在给定初始平衡条件下将飞机的飞行方程简化为:
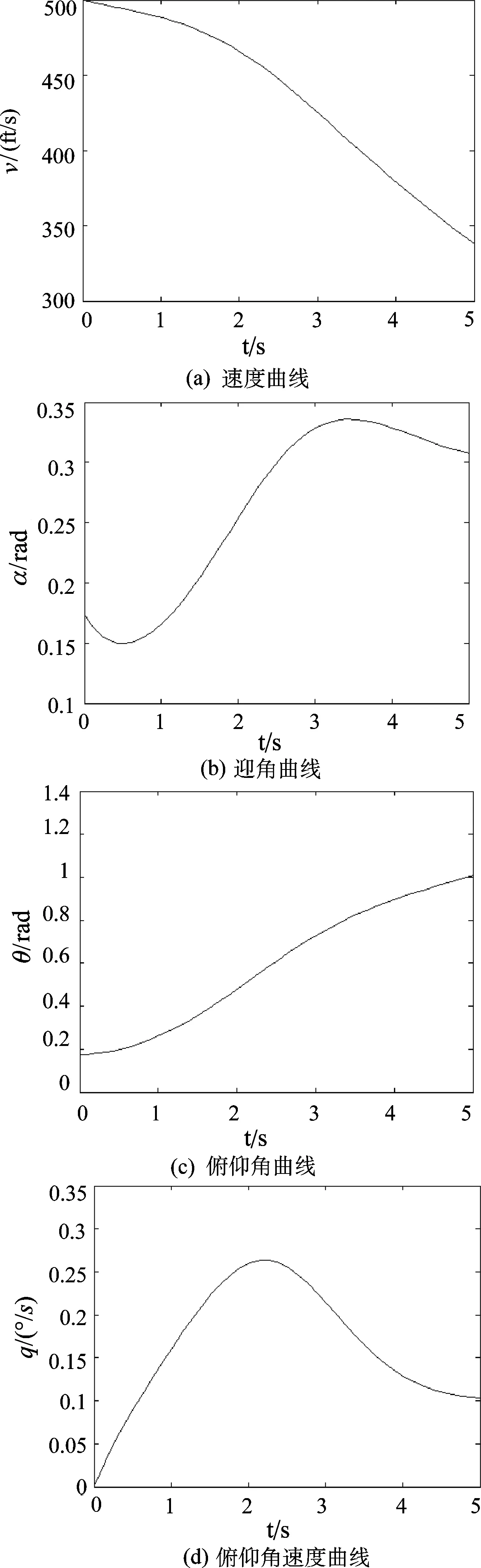

图1 F/A-18平衡点状态变量曲线Fig1 State of variable curve of F/A-18 balanced point
由图1可知,F/A-18不具有自平衡能力,如果不加控制,各状态变量将发散,飞机将失去平衡。因此,需要对F/A-18设计有效的控制器。
2 基于T-S模型的纵向飞行模型LQG控制器
2.1 LQG控制器模型建立
已知受控系统的状态方程[4]为:

式中:X(t)=[vαqθh]为状态变量;U(t)=[dedt]为输入矩阵;Y(t)=[vh]为输出矩阵;A、B、C为常数矩阵。
引入线性二次最优控制指标[5]:

式中:R为正定矩阵;Q为半正定矩阵。
对于该最优问题,引入Lagrange乘子对上述问题求解得到:
式中:G为增益矩阵。
给定特定的飞行模型初始条件,将得到唯一的平衡点,在该平衡点处对F/A-18飞行模型进行线性化处理。
当v=500ft/s,h=1000ft时,F/A-18飞行模型线性化后的状态矩阵、输入矩阵为:
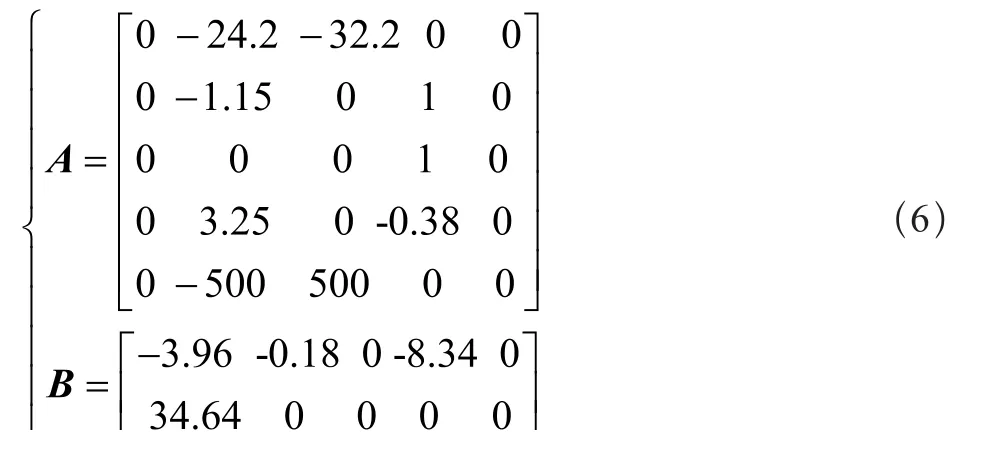
由于F/A-18模型输出参数为h、v,而h、v同时为状态变量,故F/A-18输出矩阵、前馈矩阵为:
为了方便求解,此处取正定矩阵为:
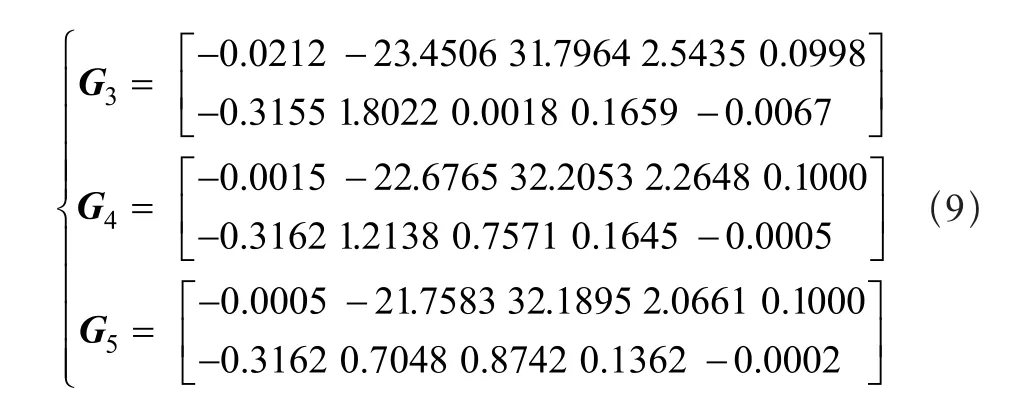
取F/A-18低空飞行速度为300≤v≤500。针对v=300ft/s、v=400ft/s、v=500ft/s分别进行LQG控制,得到三个平衡点处的反馈矩阵G分别为:
2.2 T-S模糊隶属度函数建立
T-S模糊模型是用一组模糊规则描述飞线性系统,整体系统则为一系列系统的线性组合[6],基于K条规则的一阶模糊模型,选取v作为T-S模糊模型的前件变量,Ri作为T-S模糊模型的第i条规则,则F/A-18模糊状态变量方程模型表示为:

式中:c为规则个数是第i条规则是输入变量的模糊子集;yi是第i条规则的输出。
若模糊化采用单点模糊集合[7],系统状态方程为:

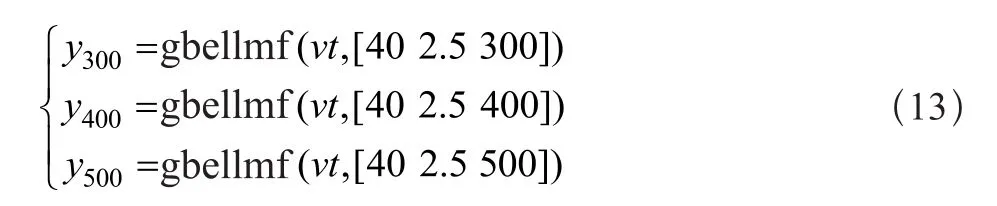
当给定速度扰动一个任意值,基于v=300ft/s、v=400ft/s、v=500ft/s三种情形,即V={300,400,500},利用 T-S 模糊判断,选取Matlab隶属度gbellmf,生成一般的钟型隶属度函数,表达式为:

隶属度函数曲线如图2所示。试验后确定三个速度对应的隶属度函数参数为:
综合三种情形分别修正输入变量de、dt,基于T-S模糊控制,得修正后系统双输入参数表达式为:


图2 高斯型隶属度函数Fig2 Gauss membership of function
2.3 控制器控制效果
初始各状态变量为v=451ft/s,α=0.1396rad,θ=0.1396rad,q=0,h=1000。指定速度v=340ft/s,经基于T-S模糊的LQG控制器调节后,速度、迎角、俯仰角等状态变化曲线如图3所示。由图3(a)可知,1s后速度接近稳态,目标速度为v=340ft/s,实际到达稳态时F/A-18的速度为v=333.2ft/s,Δv=6.8ft/s。即飞机低空飞行时速度将近似保持稳定状态。由图3(b)可知,4s后迎角接近稳态,初始时刻α=0.1396rad,F/A-18 飞机稳态时α=0.1365rad,Δα=0.0031rad。由图3(c)可知,4s后俯仰角接近稳态,初始时刻θ=0.1396rad,F/A-18飞机稳态时θ=0.1357rad,Δθ=0.0039rad。由图3(d)可知,初始时刻q=0(°)/s,4s后俯仰角速度接近稳态,q=0.015(°)/s,F/A-18飞行稳态时Δq=0.0015(°)/s。由图3(e)可知,4s后高度接近稳态,初始时刻高度h=1000ft,实际到达稳态时F/A-18的飞行高度为h=1004.5ft,高度变化Δh=4.5ft。由图3(f)可知,F/A-18升降舵开始为负偏角变化,5s后逐渐趋于稳定。由图3(g)可知,F/A-18油门杆初始为负偏角变化,3s后逐渐趋于稳定。综合图3可知,5s后状态变量均能到达稳态,即飞机低空飞行时将保持稳定状态,稳定效果较好。即基于T-S模糊的LQG控制器能够实现F/A-18低空飞行控制。

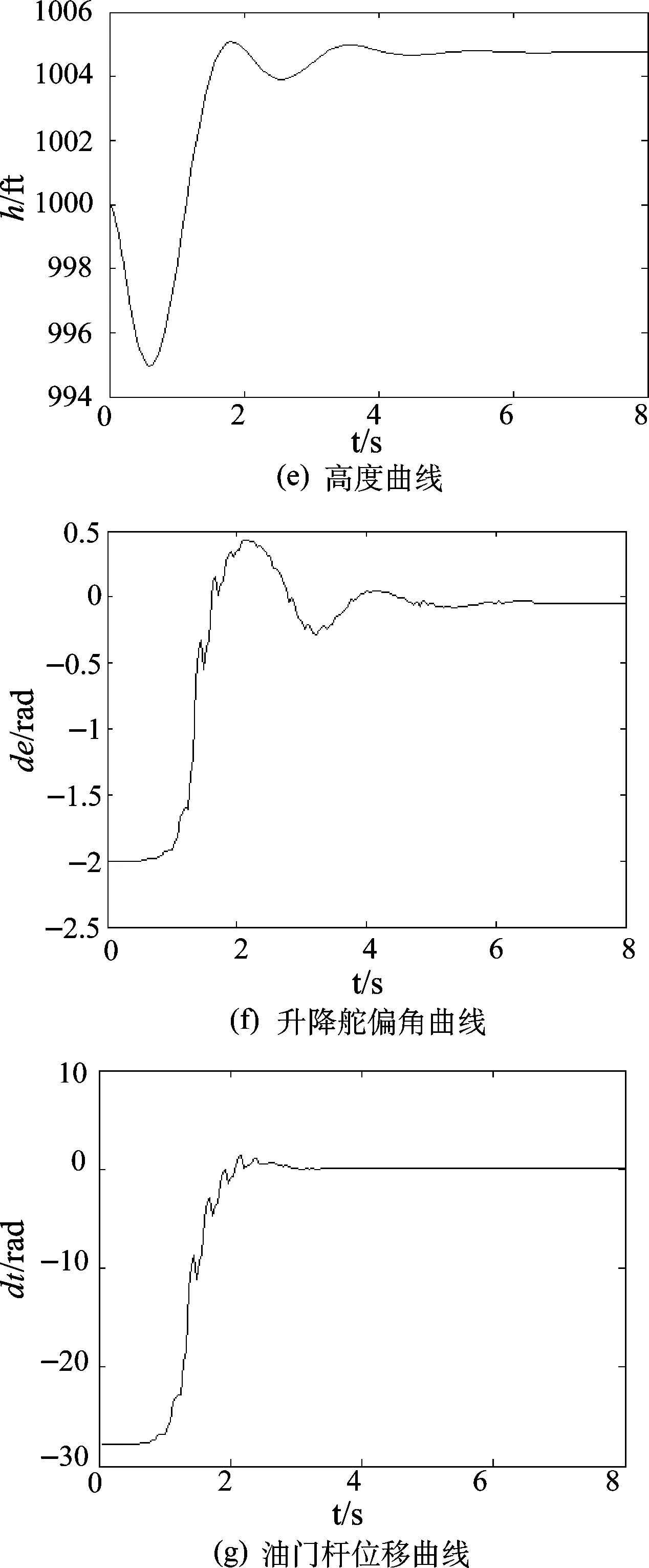
图3 基于T-S模糊的LQG控制器曲线图Fig3 LQG control curve based on T-S fuzzy
3 结束语
通过分析,可以得出以下结论:
(1)F/A-18是自不稳定系统,如果不加控制器,其状态变量 [vαqθh]将发散,系统不稳定。
(2)LQG控制器是一种有效的变增益控制器,其可以控制飞机在某一个状态时的稳定性,但无法控制一系列状态时飞机的稳定性。
(3)基于T-S模糊模型的LQG控制器能够实现F/A-18低空飞行模型簇控制,状态变量稳定,控制性能较优。