基于范例推理的智能故障诊断在机载系统中的应用研究
2017-11-02田存英邱冬
田存英,邱冬
航空工业第一飞机设计研究院,陕西 西安 710089
在飞机的全生命周期内,由于设计初期认识的不完善,以及受设备本身的可靠性影响,出现故障的可能性不可避免的存在。尽管机载设备本身都具备故障定位功能,但仍然存在大量的故障无法通过设备自检而准确定位。同时,由于飞机系统交联关系复杂、耦合度高,故障准确定位具有一定的难度,也耗费了大量的人力和时间资源。
人工智能从诞生以来,理论和技术日益成熟,在很多科学领域都获得了广泛的应用,并取得了丰硕的成果。人工智能应用于航空工业领域将具有广泛的前景。智能故障诊断指的是通过人工智能的方法对系统及设备运行状态和异常情况做出判断,并根据诊断做出判断为系统故障恢复提供依据,主要任务有故障检测、故障定位。其中,如何准确地定位故障是最重要的一个环节。智能故障诊断就需要模拟人类的推理方法,根据监测的数据自动判断是否故障,并且准确定位故障。基于范例推理(CBR)[1]是人工智能发展比较成熟的一个分支,它是一种基于过去的实际经验或经历的推理,为实现智能故障诊断提供了方法。
本文探索性地将基于CBR的智能故障诊断方法应用于机载系统,旨在机载系统故障诊断的自动化与智能化。
1 智能故障诊断
1.1 基于CBR
基于CBR是从认知科学的角度模仿人类的推理和学习机制。在处理问题时,人类总是有意或无意地回忆过去相似的经历,按经验行事来解决当前的问题。基于CBR作为一种方法论是合理的,因为客观世界有两个特点,即“相似条件会产生相似结果”和“历史总是惊人的相似”。
首先,需要将现实问题按照一定的规则真实地表达成数学语言描述的范例。如人类根据经验决策时,结果的好坏受经验丰富程度决定一样,范例库的大小能一定程度地影响决策结果的优劣;其次,规则库的生成是基于CBR的关键环节,是智能决策的核心;最后,系统根据推理结果,给出问题的建议解。对于建议解,需要代入到实际问题当中去检验,验证决策结果是否正确。若有误,需要对建议解进行修正,同时对范例进行修正,保存到范例库中,以丰富范例库的内容。
1.2 智能故障诊断模型
智能故障诊断采用范例推理方法,建立标准范例库,通过粗糙集理论进行规则提取。粗糙集理论[2]是一种能够定量分析处理不精确、不一致、不完整信息和数据表达、学习、归纳的理论方法,为智能分析数据、获取有用信息提供了理论基础。
对于实际应用,将待处理的问题根据已知规则库中的规则,得出最终诊断结果。实际上,在智能故障诊断系统应用初期还需要人工参与,将以前未遇的问题,通过专家系统的诊断方式,并且最终定位的故障保存到范例库中,以丰富范例库中的内容。当范例库足够大且包含特定系统的所有故障内容时,智能故障诊断系统就能自动定位任意故障内容。基于CBR的智能故障诊断模型如图1所示。
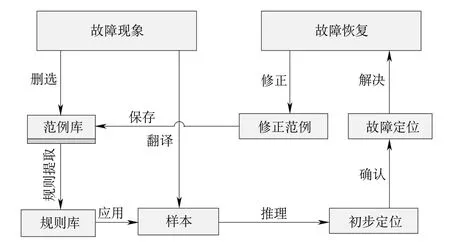
图1 基于范例推理智能故障诊断模型Fig.1 The model of fault diagnosis based CBR by AI
2 基于CBR的数学原理
基于CBR主要是通过将范例所表达的知识用信息系统来表示,信息系统可以看成是一个数据表,表中包含要研究的对象、对应对象的属性以及对象的信息。将信息系统中的属性分成条件属性和决策属性,就构成了一个决策表,某典型决策表系统见表1。
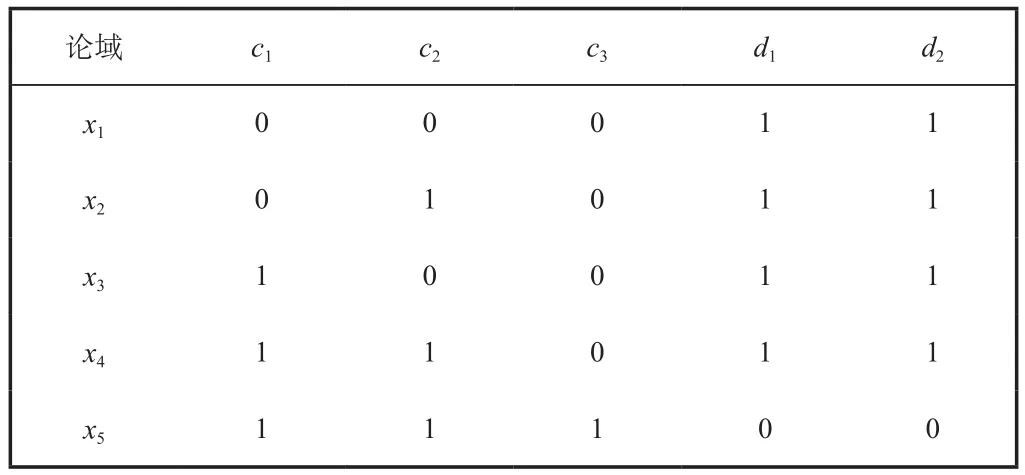
表1 典型决策表系统Table1 A typical decision table system
表1中,研究对象为X={x1,x2,x3,x4,x5},对应对象的属性分为条件属性和决策属性。其中,条件属性为C={c1,c2,c3},决策属性为D={d1,d2}。对象的信息由表中所有数值表示。由决策表中的信息,通过粗糙集理论得到知识的过程就是规则提取过程。
2.1 决策表表示
决策表可以形式化地由M=(X,A,P,Q}四维组来表示。其中,论域X={x1,x2,…,xl-1,xl}表示范例库中标准范例个体。条件属性集C={c1,c2,…,xm-1,xm}为推理前件,决策属性集D={d1,d2,…,xn-1,xn}为推理后件,属性集A=C∪D;P表示由所有属性P∈A的值域所构成的集合,Q∶X×A→P为二维函数,它指定了论域X中每一个对象的每个属性值。
2.2 规则提取
在四维组信息表M=(X,A,P,Q)中,实际规则就是由Q∶X×A→P所完全决定,其中条件属性集是因,决策属性集是果,决定因果之间的逻辑关系就是四维组信息表所包含的推理规则。
(1)等价关系
定义属性子集EA上的关系R如下,若对e∈E,均有:

则称xi和xj在属性集E上具有关系R,根据关系R的定义,它满足自反性、对称性和传递性。关系R是一个等价关系,记为xi≡xj。关系R可以对论域X进行分类,使得每一类中个体在属性集E上具有相同特征。
(2)正域
对于论域X的任意子集U,定义关于等价关系R的下近似为:

在条件属性集C和决策属性集D上,分别能够得到等价关系RC和RD,则定义等价关系RC关于等价关系RD的正域:

式中:X/RD为论域X关于等价关系RD构成的分类;POSC(D)表示根据等价关系RC,能够正确地分类于X/RD中等价类的对象的集合。
(3)属性约简
信息库中的信息不是同等重要的,甚至可能其中的某些信息是多余的。属性约简[3]就是保持信息库分类能力不变的情况下,删除表中的多余信息。
定义条件属性集C关于等价关系RD为相互独立的,则不存在条件属性真子集EC,满足如下关系:

定义条件属性子集EC,为关于等价关系RD的属性约简,若条件属性子集E关于等价关系RD为相互独立的且满足式(4)。
(4)规则生成
对每个决策属性d∈E,求取条件属性集关于等价关系Rd的属性约简E,再根据属性约简结果,得到最简可信规则。
3 模型建立
3.1 规则库生成
根据决策表信息,按照属性约简算法[3]对决策表中的信息进行相应属性约简。属性约简的目的就是在保存信息系统原有的分类能力和近似空间的基本属性完整的前提下,去除系统中的冗余数据,保证最终得到最简决策规则,并且可有效提高效率,降低噪声干扰。最后将最简决策规则加入到规则库中。
3.2 智能决策
对于测试的样本信息,按照决策表中条件属性集,提取相应属性的特征值y={y1,y2,…,ym-1,ym},将规则库应用于测试样本条件属性特征值上,可得到智能决策结果结果。
3.3 自主学习
智能故障诊断的另外一个优点是可以通过自主学习,不断提升对事物的认知能力,提高故障定位准确率。对于智能决策结果,专家系统对结果进行确认并修正后,得到可信的数据存储到范例库中,智能故障诊断系统随着更新规则库,实现对事物规律的自主学习。
3.4 算法流程
智能故障诊断算法流程如下:
(1)步骤 1:根据需求,建立四维信息表M=(X,A,P,Q)。
(2)步骤2:根据四维信息表进行属性约简[4],根据属性约简结果,得到决策规则集Ψ。
(3)步骤3:对于监控样本y,若cj),则置 NewCase(y)=0;否则置 NewCase(y)=1。
(4)步骤4:对ψ∈Ψ,将决策规则ψ应用于监控样本信息上,得到建议决策结果 Result(y),若无法决策,用“/”代替。
(5)步骤5:由专家系统对决策结果进行检测确认,并可进行修改得到NewResult(y)。
(6)步骤 6:若NewCase(y)=1,则将y=(y,NewResult(y))加入到四维信息表M=(X,A,P,Q)中,得到新的四维信息表,返回步骤2。
(7)步骤7:若测试样本中无样本剩余,则结束。
4 应用实例
4.1 故障诊断决策表构建
将基于CBR应用于机载系统故障诊断,通过监控系统各设备间的交互数据,对系统及设备运行状态和异常情况做出判断,准确定位故障。对于实际应用过程,分析与该过程相关的属性集合,根据分析结果,将过去经验数据存储在标准范例库中并构建决策表。
以某型武器发射过程中扣压扳机后,武器未正常离机故障为例,与该过程相关的属性有扳机状态、武器管理系统状态、显示控制系统状态、任务系统状态以及投放系统状态。武器发射时相关系统的交联关系如图2所示。
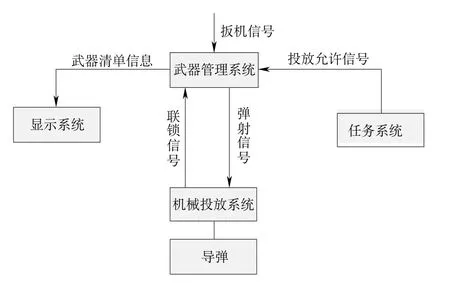
图2 武器发射系统交联图Fig.2 System interaction of weapon launching
由图2可知,同时对系统工作流程进行详细地分析,构建信息系统作为智能故障定位的决策表。其中,条件属性集有扳机信号、投放允许信号、弹射信号、联锁信号及清单信息,决策属性集有扳机故障、任务系统故障、武器管理故障、机械投放故障及显示系统故障。
4.2 故障诊断规则库
根据信息表建立规则库,同时为了方便规则描述,令发生故障为1,未发生故障为0。
(1)当d=d1时,根据表1得到条件属性集关于等价关系Rd的属性约简E={c1},则得到规则1:
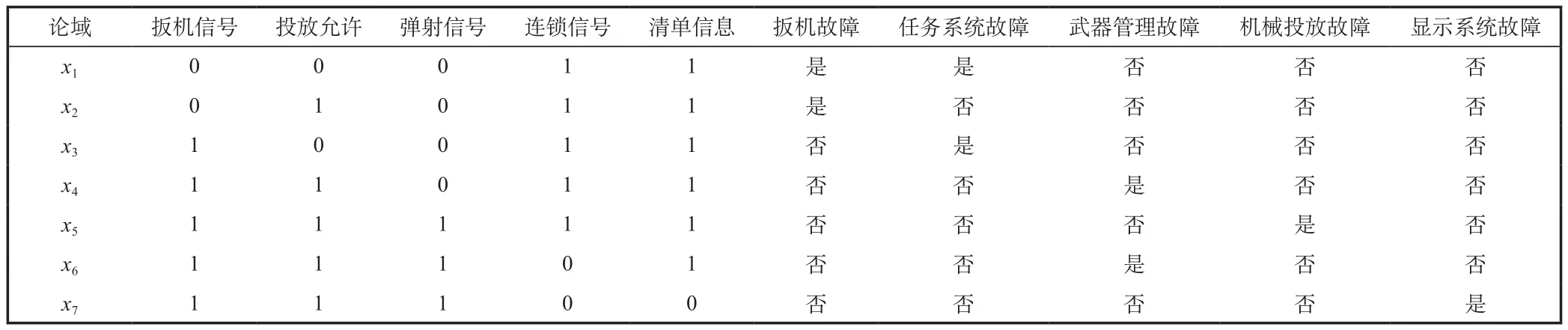
表2 武器发射故障决策表Table2 The malfunction decision table of weapon launching
若c1=1,则d1=0;若c1=0,则d1=1。
(2)当d=d2时,根据表1得到条件属性集关于等价关系Rd的属性约简E={c2},则得到规则2:
若c2=1,则d2=0;若c2=0,则d2=1。
(3)当d=d3时,根据表1得到条件属性集关于等价关系Rd的属性约简E={c1,c2,c5},则得到规则3:
若c1=0,c2=0,c5=1,则d3=0;若c1=0,c2=1,c5=1,则d3=0;
若c1=1,c2=0,c5=1,则d3=0;若c1=1,c2=1,c5=1,则d3=0;
若c1=1,c2=1,c5=0,则d3=0;若c1=1,c2=1,c5=1,则d3=1。
(4)当d=d4时,根据表1得到条件属性集关于等价关系Rd的属性约简E={c3,c4},则得到规则4:
若c3=0,c4=1,则d4=0;若c3=1,c4=1,则d4=1;
若c3=1,c4=0,则d4=0。
(5)当d=d5时,根据表1得到条件属性集关于等价关系Rd的属性约简E={c5},则得到规则5:
若c5=1,则d5=0;若c5=0,则d5=1。
4.3 诊断结果
通过实际监控的总线数据,得出在条件属性集C上的三组信息测试的样本信息,见表3。
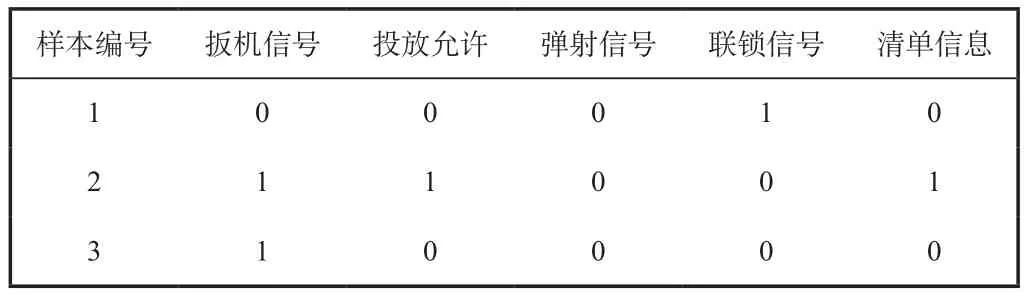
表3 武器发射记录的关键信息表Table3 The recorded key information of weapon launching
(1)仿真结果
根据4.2节得到的规则1~5,分别对上述测试样本进行仿真分析,系统智能诊断结果与专家诊断结果对比见表4。

表4 智能诊断结果与专家诊断结果对比表Table4 The comparison of fault diagnosis by AI with ES
按照算法流程,将经过专家诊断过的测试样例作为标准范例加入范例库,通过自主学习得到新的推理规则,再应用新的推理规则进行故障诊断。系统智能诊断结果与专家诊断结果对比见表5。

表5 自主学习后智能诊断结果与专家诊断结果对比表Table5 The comparison of fault diagnosis by AI with ES after self-learning
(2)准确率
根据仿真结果与专家诊断结果对比分析可知,基于CBR的智能故障诊断故障定位准确率在80%以上。由于标准范例库中范例数较少,不能提取实际系统的所有规则。随着范例库的丰富,基于CBR的智能故障诊断的准确率也会随着提高。
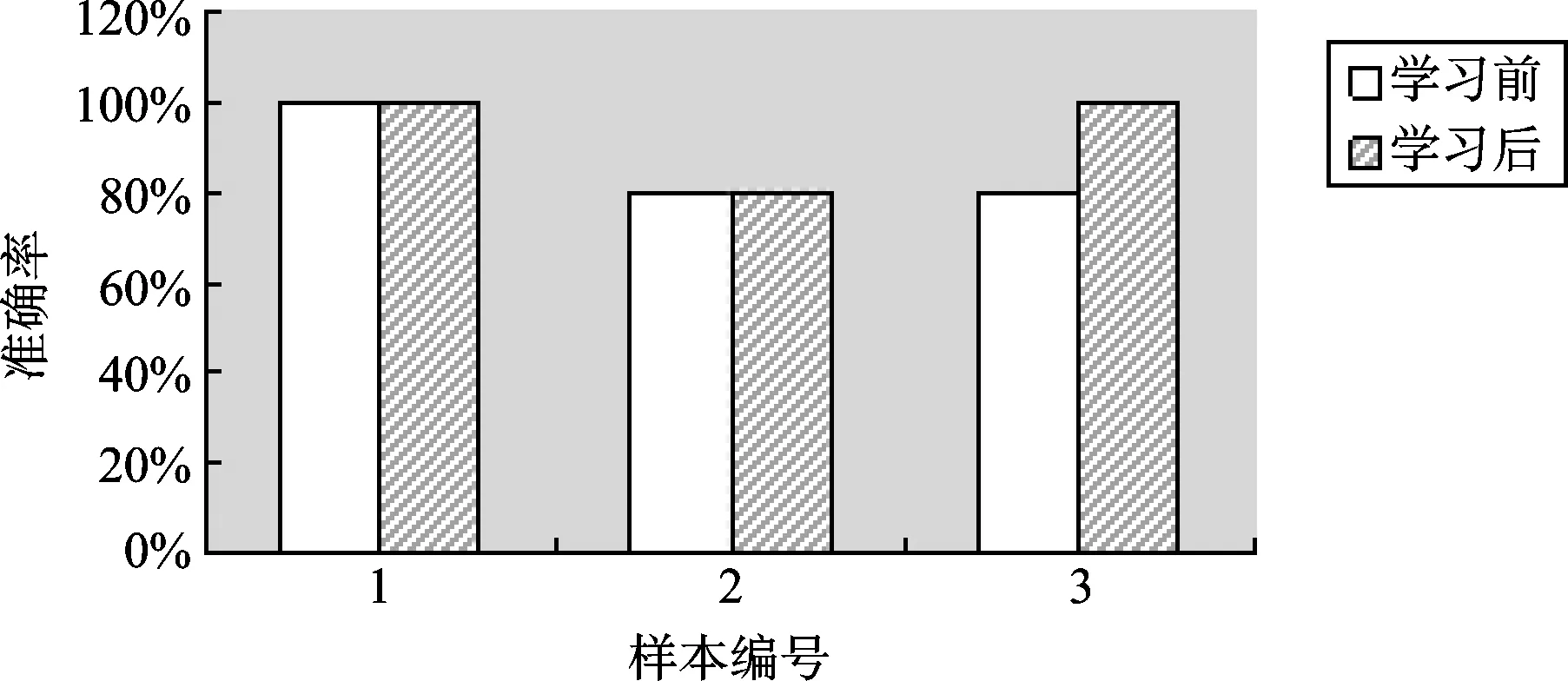
图3 自主学习前、后故障定位准确率Fig.3 The rate of accuracy before and after self-learning
5 结束语
基于CBR的智能故障诊断技术是一门极富挑战性的技术,该技术能够通过自主学习,实现对经验知识的智能化累积,提高对系统的认知水平。它可以应用于机载系统数据分析设备,实现机载系统故障的智能定位,也可以应用于试验验证平台,实现机载系统自动化验证。基于CBR的智能故障诊断技术的应用,不仅可以把科研工作者及地勤人员从繁杂地排故工作中解脱出来,也节省了大量人力、物力资源。