基于CUDA的导航雷达视频多样化显示∗
2017-10-23钱国栋嵇亮亮
钱国栋 嵇亮亮
(1海军驻南京地区雷达系统军事代表室 南京 210003)
(2中国电子科技集团公司第二十八研究所 南京 210007)
基于CUDA的导航雷达视频多样化显示∗
钱国栋1嵇亮亮2
(1海军驻南京地区雷达系统军事代表室 南京 210003)
(2中国电子科技集团公司第二十八研究所 南京 210007)
鉴于导航雷达视频显示需求不断提高,论文提出了一种基于CUDA的软件化雷达视频显示方式,通过此方式,可实现船舶在不同航向、不同运动方式下的雷达视频显示;并且,由于此方式的灵活性,可方便实现单部导航雷达视频的双P显同屏显示、导航雷达视频与电子海图叠加显示、单部导航雷达视频远近量程同屏显示、不同范围的雷达视频同屏显示等应用,文章最后给出了应用效果。
导航雷达;电子海图;P显显示;统一计算设备架构;并行处理
ClassNum ber TN957
1 引言
船用导航雷达也称为航海雷达,主要用于保障船舶航行安全,随着航海事业的发展,各类船舶上几乎都安装了导航雷达,其已经成为船舶必备组成部分。在雾天、黑夜等能见度低的情况下,导航雷达可以用于船只航行,防止船舶碰撞;另外,导航雷达还可以用于探测船舶周围的目标,从而实现航行避让以及目标定位等功能[1~2]。随着现代导航雷达技术的不断革新,在无人艇、港口交通管理、生态环境保护及安全监控扫描等领域,其作用也越发明显[3~4]。通常情况下,导航雷达必须配备显示终端协同工作,通过显示终端实现雷达回波显示、目标观察等操作[5]。
2 主要工作流程
导航雷达的主要工作流程如图1所示,雷达前端产生原始视频,经过检测录取处理之后,产生目标航迹,送显示软件,显示软件将检测视频与目标航迹叠加显示,此外,显示软件具有雷达操控、雷达状态显示以及电子海图[6]叠加显示等功能。

图1 导航雷达主要工作流程
3 视频显示需求
3.1 多样化的显示方式
随着导航雷达应用范围的不断扩大,其雷达视频的显示需求也不断提高,譬如正北向上及船艏向上等显示模式切换、雷达视频平滑及尾迹实现、P显开窗放大、真运动模式下视频显示等等。
并且,近年来,随着导航雷达在无人艇、海岸监视、VTS等领域的使用,对导航雷达的视频显示也提出了新的要求,譬如显示量程的无极缩放、视频无限漫游、雷达视频与电子海图叠加显示、单部雷达视频多窗口显示等等。
3.2 庞大的显示处理数据量
导航雷达视频显示需要处理雷达视频数据量庞大,以单部导航雷达为例,其天线扫描周期约为3s、方位量化为 0.044°(360°×213),距离量化为10000个回波点,则其每秒钟所需处理的雷达回波的数据量大约2000万左右;如果雷达回波图像的显示分辨率为1200*1200,再加上局部显示窗口,则每帧需要处理的数据量约为1500万左右,如果涉及视频画面同屏显示等情况,则显示数据量还会成倍增加,如此庞大的数据处理是当前采用软件化方式处理雷达扫描变换的主要瓶颈。
4 传统显示处理方式
当前较为主流的导航雷达数据扫描变换主要分为两类,即基于专用硬件平台的雷达数据扫描变换和基于软件化的雷达数据扫描变换。专用的硬件平台雷达数据扫描变换主要是通过EPROM查找表或高速DSP计算等方式实现的,这些实现方式可实现信号的高速转换,且精度高,但需额外的器件予以实现,并且应用方式不够灵活[7~8]。
基于软件化的导航雷达数据扫描变换利用当前越来越高的CPU处理器性能来实现,应用灵活,通用型好,目前很多导航雷达视频显示逐步采用了软件化的方式,如基于DirectX、OpenGL等技术手段,但是实际还是要靠CPU来完成扫描变换,在处理的实时性和高速性有所欠缺[9~10]。
本文主要是基于CUDA技术,提出了一种导航雷达视频高效实时显示的解决方法,以满足同一部导航雷达不同量程、不同观察方位、海图回波叠加等显示需求,有很强的灵活性。
5 基于CUDA的视频显示处理
5.1 CUDA优势特点
现在英伟达CUDA显卡芯片有着强大的并行计算能力,很多处理大的数据集的应用可以使用数据并行处理模型加速。本文正是利用英伟达GPU强大的并行计算能力,对庞大的雷达回波数据进行高效实时的显示处理,从而将CPU从运算量大、逻辑简单的任务中解放出来,而此类任务正是CUDA的设计初衷[11~12]。
5.2 视频显示处理实现
采用CUDA技术实现导航雷达回波显示处理的主要步骤如下:
步骤一:设置导航雷达显示画面参数,主要包括雷达画面显示半径、雷达画面显示范围、本船运动模式等;
步骤二:设置导航雷达回波参数,主要包括显示量程设置、方位码数、采样位数等;
步骤三:通过CPU为导航雷达回波数据在GPU上分配内存,将导航雷达回波数据复制至GPU,并将所设置的参数拷贝至显存;
步骤四:采用CUDA的多个线程,建立导航雷达显示画面与导航雷达回波数据之间的对应关系,并在对应的导航雷达画面位置处写入雷达回波数据;
步骤五:依据相关算法,对导航雷达显示画面每个位置上的雷达回波数据进行并行处理;
步骤六:采用显示更新函数,将更新后显示显存中的数据通过显卡显示输出。
6 应用效果
6.1 远近不同量程显示
图3给出了单部导航雷达视频在远近不同量程下显示时的同屏观察效果,由于雷达画面显示量程与雷达前端相关,操作过程中以其中某一画面的显示量程为主操控雷达前端,另一画面可用于辅助观察。

图2 基于CUDA的导航雷达视频显示
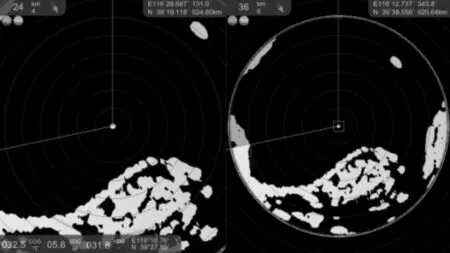
图3 远程量程同屏显示
6.2 不同显示模式显示
图4给出了单部导航雷达视频在不同显示模式时的同屏观察效果,左画面为船艏向上显示模式,右画面为船尾向上显示模式,两种显示模式综合观察,可以达到首尾兼顾,增大观察范围。
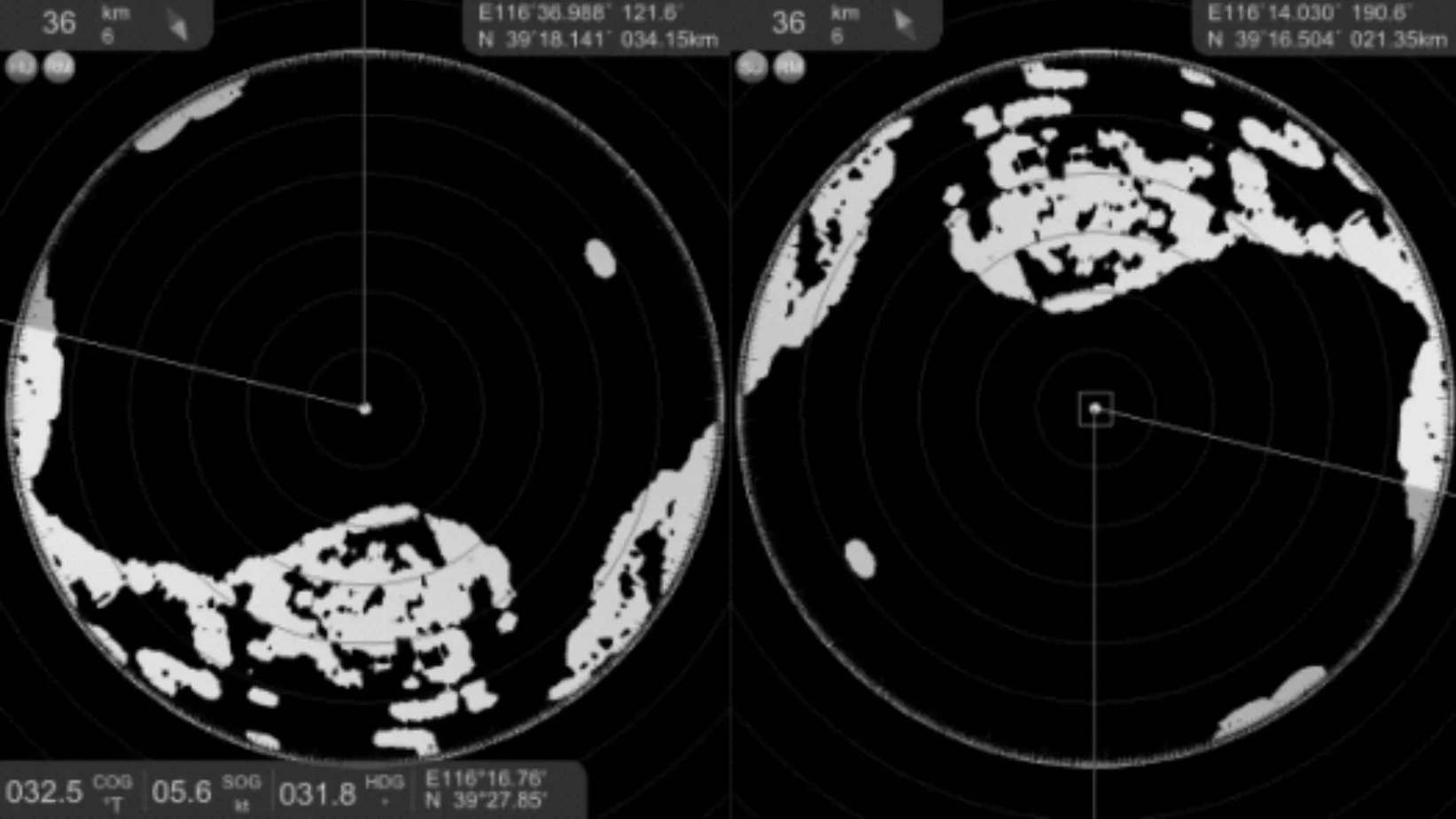
图4 不同显示模式同屏显示
6.3 不同观察范围显示
图5给出了单部导航不同观察范围同屏观察效果,左图为正常船艏向上方式显示,右图是对某一区域的重点观察。
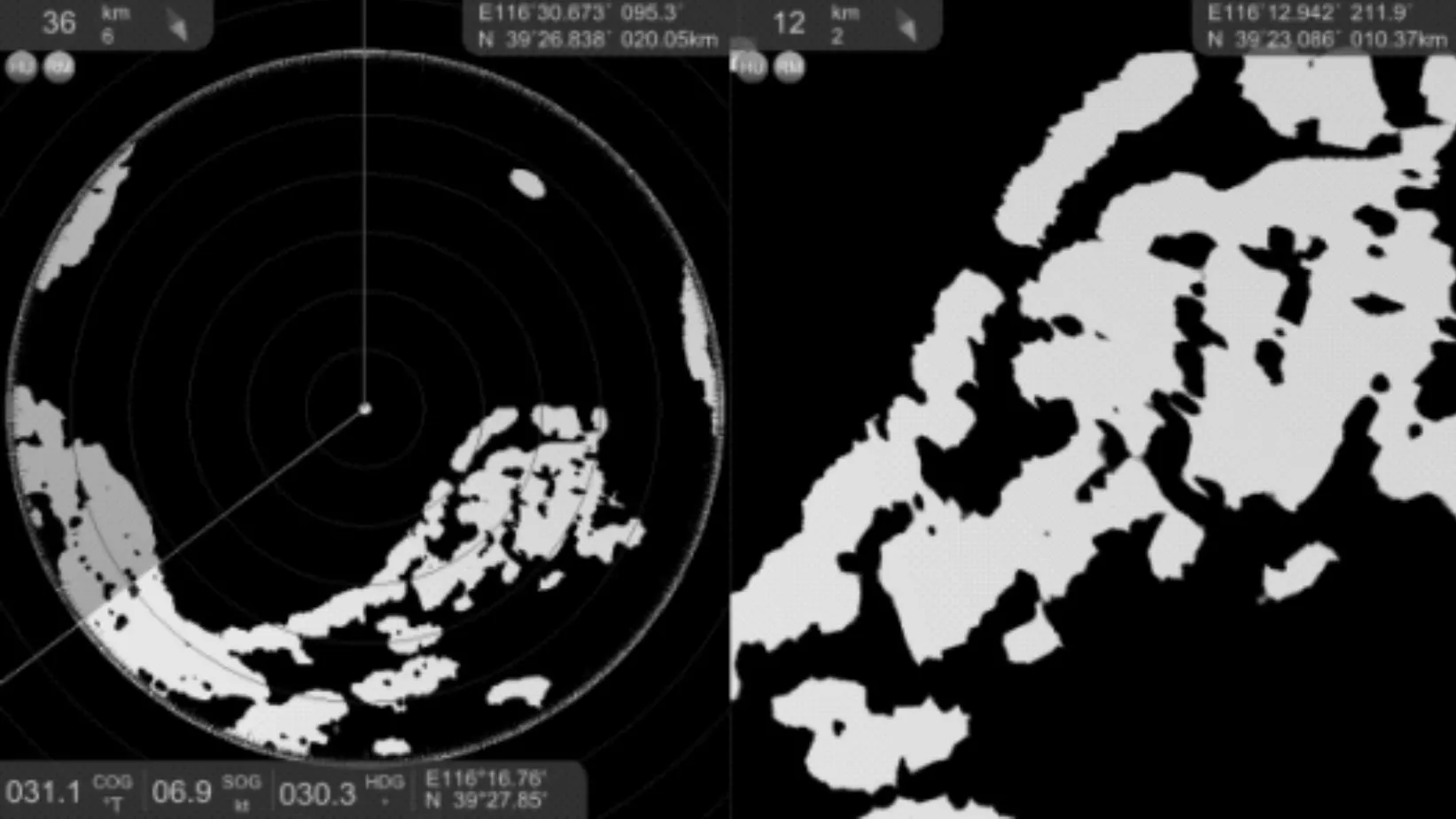
图5 不同观察范围同屏显示
6.4 电子海图叠加显示
图6为雷达视频与电子海图叠加后显示效果。
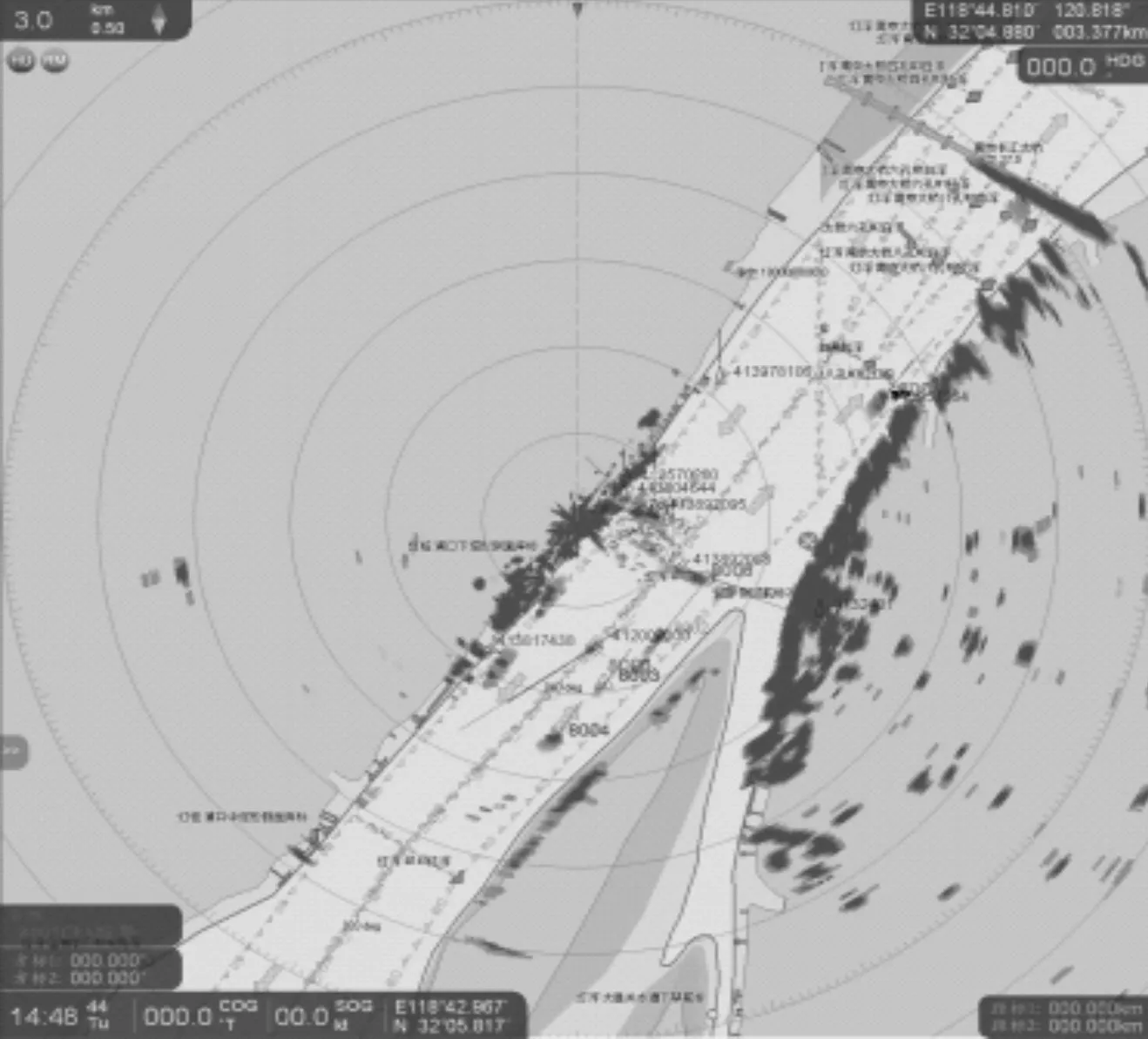
图6 雷达回波与电子海图叠加显示
7 结语
本文基于当前流行的CUDA并行处理技术,对导航雷达的视频显示进行并行处理,有效的解决了软件化扫描变换中导航视频显示处理数据量庞大、实时性不够问题。并且,与传统的硬件高实时处理效果相比,还具有非常强的灵活性。文章最后给出了几种应用情况,说明了本方法的灵活高效性。
[1]叶玲,王远斌.导航雷达目标告警技术研究[J].江苏科技信息,2016(15):50-51.
[2]厉静.船用导航雷达显示系统的设计与实现[D].西安:西安科技大学,2014:1-4.
[3]张波等.一种无人艇载导航雷达的设计[J].科技视界,2016(19):276-277.
[4]姜波.现代导航雷达的应用[J].天津航海,2016(1):48-49.
[5]徐学发.嵌入式导航雷达显控终端的研究与设计[D].镇江:江苏科技大学,2012:2-9.
[6]张振华,王远斌,叶玲.基于S-57标准的电子海图的设计与实现[J].舰船电子工程,2015,35(2):94-98.
[7]张国兵,赵严冰.基于FPGA的雷达回波信号设计与实现[J].雷达科学与技术,2010(1):87-90.
[8]毕红葵等.用于光栅扫描雷达显示系统的坐标变换方法[J].无线电工程,2001(S1):50-52.
[9]郭敏.Windows下利用DirectX进行PPI显示程序的开发[J].火控雷达技术,2002,31(2):48-55.
[10]彭劲松,秦永元,严恭敏.OpenGL在雷达图像实时显示中的应用[J].武器装备自动化,2006,25(1):5-6.
[11](美)Shane Cook.CUDA并行程序设计[M].北京:机械工业出版社,2016:16-23.
[12]左军涛等.基于GPU的航迹快速计算方法[J].指挥信息系统与技术,2011,2(4):55-59.
Diversified Disp laysof Navigation Radar Video Based on CUDA
QIAN Guodong1JILiangliang2
(1Military Representativesoffice ofRadar System of the PLANavy in Nanjing,Nanjing 210003)
(2 The 28th Research Institute ofChina Electronics Technology Group Corporation,Nanjing 210007)
In consideration of the requirements ofnavigation radar video display,amethod with CUDAis proposed in this paper.With thismethod,the navigation radar video can be shown in the condition ofdifferent course andmotion.In addition,because of themethod’s flexibility,it can achieve the goal such as two P displays show on one screen,radar video showsmixed with electronic chart,one radar video showswith two ranges,one radar video showswith differentarea and so on.In the end of this paper,the effectof themethod is present.
marine navigation radar,electronic chart,P display,compute unified device architecture(CUDA),parallel processing
TN957
10.3969/j.issn.1672-9730.2017.09.017
2017年3月10日,
2017年4月27日
钱国栋,男,工程师,研究方向:雷达总体技术。嵇亮亮,男,工程师,研究方向:雷达数据处理。
