基于LabVIEW的激光惯导显示控制系统∗
2017-10-23黄春福
黄春福 查 峰
(海军工程大学导航工程系 武汉 430033)
基于LabVIEW的激光惯导显示控制系统∗
黄春福 查 峰
(海军工程大学导航工程系 武汉 430033)
惯导系统的信息交互流程复杂、信息量大,便捷高效的显示控制系统是实现惯导操作测试、数据交互的必要条件。基于虚拟仪器技术,利用LabVIEW图形化编程语言设计了某型激光惯导装备的显控系统。首先,根据激光惯导装备的通讯协议,完成了显控系统的软件流程设计;其次,根据用户需求,合理规划了显控系统功能并进行了程序实现;最后,分别进行了惯导装备数据采集、显控系统离线调试、软硬件联合调试实验。系统实现了对激光惯导装备输出数据的解析和多样化显示,初始装订及状态切换等功能。
惯性导航;LabVIEW;显示控制;虚拟仪器
ClassNum ber TP316
1 引言
惯性导航不依赖于任何外部信息,也不向外部辐射能量,具有良好的隐蔽性,不受外界电磁干扰的影响,是现代导航的重要手段。惯性导航系统能提供位置、速度、航向和姿态角等数据,信息全面[1~3],需要合理的界面显示。在实际运行中显示控制系统需要对大量的数据进行采集、处理和显示,且需要进行实时操作。采用传统的手工记录显然不能满足需求;采用示波器显示,理论上可行,但电路设计复杂,且不能对惯性导航系统实施控制;Matlab、Visual Basic等编程软件虽然能实现对惯导装备的显示和控制,但编程方法复杂,且不利于后期的调试、修改[4]。
LabVIEW是一种程序开发环境,由美国国家仪器(NI)公司研制开发,运用图形化编程语言G编写程序,产生框图形式的程序,使用它进行原理研究、设计、测试并实现仪器系统时,基本上不写文字代码,可以大大提高工作效率[5~6]。
根据惯导装备的信息显示控制需求,基于虚拟仪器技术在测控编程上的技术优势,利用Lab-VIEW设计了一种惯性导航显示控制系统。该系统能实现对实际惯导装备数据采集及在设计的显示面板显示,同时发送控制命令实现对惯导装备的初始装订和状态切换。
2 虚拟仪器与LabVIEW开发环境
虚拟仪器是美国National Instruments(简称NI)公司在计算机平台上通过自己的产品把工业测量与控制和计算机的结合的一种技术。它是计算机硬件、软件技术和总线技术日益发展并向其他领域渗透过程中,与测试测量、自动化技术等密切结合,孕育出的一项全新成果。其核心思想是“软件即是仪器”,将计算机作为统一的硬件平台,充分利用计算机的快速运算、大容量存储,易于操作等特点,把传统仪器软件化、图形化,模拟出传统仪器的功能。虚拟仪器相比于传统仪器优势明显,如体积减小,性能大大提高,人机交互友好,可与网络及周边设备互联,便于测试等[7~10]。
LabVIEW是Laboratory Virtual Instrument EngineeringWorkbench的简称,是NI公司为虚拟仪器设计的软件开发环境,具有简单直观、易于理解和开发效率高等特点。它尽可能地使用科学家、工程师所熟悉的概念、图标,无论是否有丰富的开发经验,均能顺利应用。LabVIEW软件是NI设计平台的核心,在数据采集、仪器控制、测量分析与数据显示等领域应用十分广泛[11~14]。
3 激光惯导装备结构与组成
本设计根据某型激光惯导系统[15~17]实际装备的数据显示和采集需求设计激光惯导显控系统。该型装备如图1所示,采用27±2V供电,数据输出采用RS232串行通信[18~20],串口输出采用A5口,数据传输波特率为9600,8位数据位,无校验,1位停止位。

图1 某型激光惯导装备及电源
系统开机之后持续输出数据,若输入状态字“i”,系统返回信息提示输入经纬度和高度,输入后完成装订。若输入状态字“m”,系统返回提示信息,根据提示可进入准备、对准、导航等状态。系统数据交互流程如图2所示。
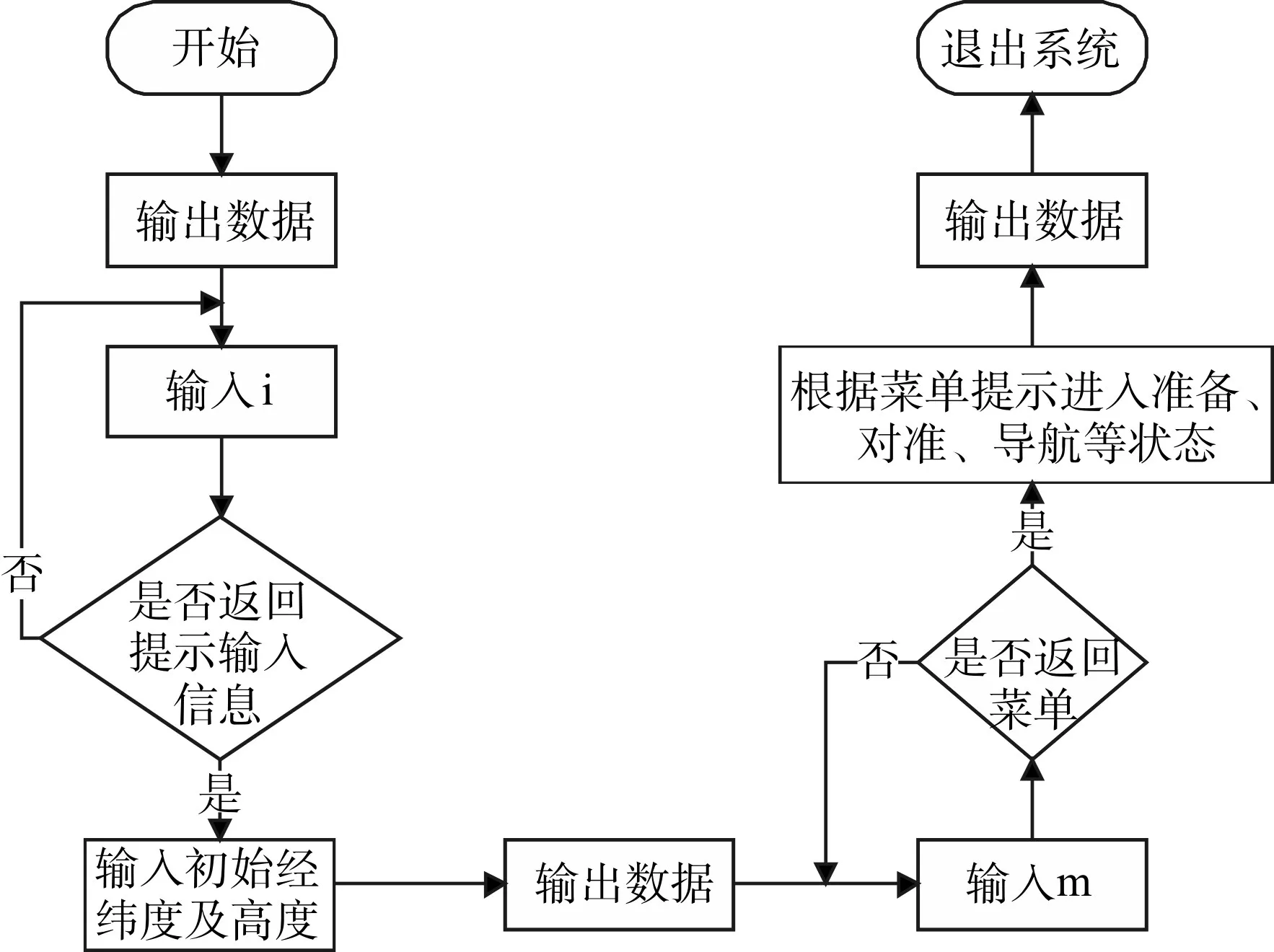
图2 某型激光惯导装备数据交互流程图
4 总体设计
激光惯导显控系统根据激光惯导装备的数据交互流程和通讯协议,完成激光惯导装备与上位机之间的数据交互。系统的结构如图3所示。激光惯导装备接收来自显示控制系统的信息包括状态选择指令、状态变化指令、系统初始经度、纬度等,从而完成激光惯导装备的初始装订和流程控制。同时,激光惯导在完成初始位置装订后,利用陀螺仪和加速度计量测的运动信息进行惯导解算,输出解算后的速度、姿态、航向、位置等导航信息,此外还包括系统状态、陀螺和加速度计等原始数据。激光惯导显控系统接收数据后,进行数据的识别、截取、解析等操作以获取导航数据,并通过文本、图表等方式实时显示。
5 软件设计与实现
显示控制系统前面板由选项卡控件将其分为两个面板,分别用于显示基本信息和显示图表信息。基本信息面板由串口设置、流程控制、数据分类显示、综合显示四个部分组成。串口设置用于对串口通讯参数的设置,如:波特率、校验等;流程控制包括初始装订及准备、对准、导航等状态的选择;数据分类显示将原始数据进行处理后按照位置、速度、姿态等分类显示,从而更加直观地获得导航参数;综合显示窗口用于显示提示信息,原始数据等。图表显示面板采用波形图实时显示经纬度、高度及速度、姿态等信息,显示更为清楚、直观。程序前面板如图4所示。
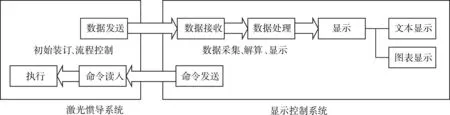
图3 激光惯导显控系统整体设计
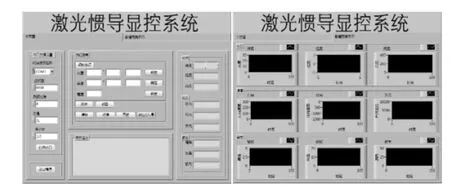
图4 程序前面板
后面板程序框图包括串口设置部分、接收显示部分、命令发送部分。串口设置中波特率、奇偶校验等均为可调,为不同的通讯协议提供方便设置。接收部分接收数据后进入缓冲区,经过一定时间延迟进入显示部分,这里采用搜索/拆分字符串、截取字符串两个函数获得位置、速度、姿态等信息,从而分类显示。发送部分采用事件结构,通过按钮值改变触发。触发前在各对应的输入框输入参数,通过连接字符串函数按照通讯格式连接,点击对应按钮即触发事件,参数发送。整个框图外围采用分支结构打开串口,采用循环结构与按钮组合退出程序。程序后面板程序框图如图5所示。
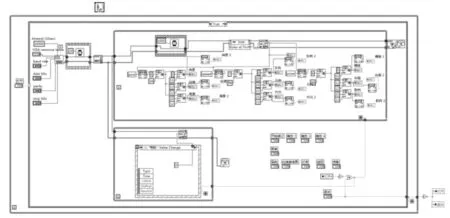
图5 程序框图
6 系统通讯实验
为验证激光惯导显控系统的可行性和可靠性,分别进行了不同条件下的测试实验。首先,利用串口通讯工具与激光惯导装备进行测试,采集惯导装备的数据,确定通讯流程和数据协议;在此基础上,利用串口助手进行显控系统的通讯调试,测试显控系统对数据的解析;最后进行惯导装备和显控系统的软硬件联调。
激光惯导装备开机后,将其接入便携式计算机,利用串口工具进行数据采集。按照通讯协议,选择不同的惯导装备状态,以采集不同状态下的系统输出,验证惯导装备通讯协议正确性。实验结果表明,激光惯导装备能够稳定输出数据,并根据用户的选择进行状态变换。
得到激光惯导的输出数据后,利用其进行激光惯导显控系统的离线测试。通过软件虚拟一对串口将串口工具与显控系统相连。串口工具发送采集的惯导装备输出数据,显控系统进行数据接收和解析,完成数据显示。实验结果表明串口助手发送的数据显控系统均能收到,能正常显示且解析正确,同时,显控系统发送的命令字,串口助手也均能接收,如图6所示。

图6 串口助手与LabVIEW程序通讯测试
在完成系统的离线调试后,进行激光惯导装备与显控系统的软硬件联调,实验如图7所示。激光惯导装备通电后,按照通讯协议发出数据。用户可以通过显控系统选择状态,惯导装备根据用户的选择切换自身状态。同时,对惯导装备的输出进行快速、准确解析,通过文本、图形等不同形式显示,如图8。试验表明,显控系统运行稳定、可靠、人机交互便捷。
7 结语
利用计算机和激光惯导装备在LabVIEW编程环境下完成了惯导装备输出数据的解算显示和对惯导装备进行初始装订及控制。使用软件编程,方便后期调试和修改。使用串口助手和激光惯导装备进行测试,保证测试的可靠性。该显示控制系统直观、简洁、操作简单,满足了实际惯导装备的显示控制需求。

图7 实验测试环境
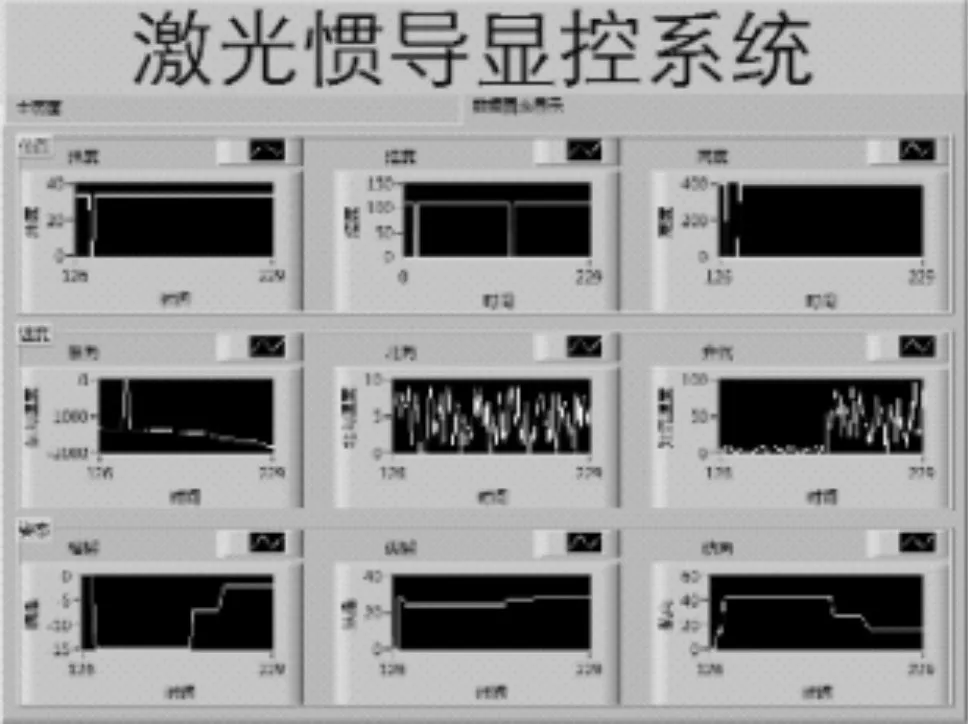
图8 显控系统数据图形显示
[1]陈永冰,钟斌.惯性导航原理[M].北京:国防工业出版社,2007:7-12.
[2]周徐昌,沈建森.惯性导航技术的发展及其应用[J].兵工自动化,2006,25(9):55.
[3]董进武.惯性导航技术浅析[J].仪表技术,2017,(1):41.
[4]刘鸣艺,张京娟,付常亮.基于LabVIEW的组合导航显示控制系统[J].电子测量技术,2013,36(10):72.
[5]肖成勇,雷振山,魏丽.LabVIEW2010基础教程[M].北京:中国铁道出版社,2012:1-4.
[6]胡柳燕,卢荣胜,周维虎,韩晓泉.基于LabVIEW的可见光相机显控系统设计[J].控制系统,2010,26(10-1):51.
[7]刘晋霞,胡仁喜,康士廷.LabVIEW2012中文版虚拟仪器从入门到精通[M].北京:机械工业出版社,2012:2-11.
[8]郝丽,赵伟.基于声卡的虚拟仪器教学[J].实验室研究与探索,2014,33(2):79-80.
[9]李震,柯旭贵,汪云祥.虚拟仪器的发展历史、研究现状与展望[J].安徽工程科技学院学报,2003,18(4):1-3.
[10]路亚峰,陈义军,温新岐,孙国忠,蒋先念.虚拟仪器技术研究现状与展望[J].理论与方法,2010,29(11):35-37.
[11]陈树学.LabVIEW实用工具祥解[M].北京:电子工业出版社,2014:1-5.
[12]P.M.Wrobel,M.Bogovac,etal.LabVIEWinterfacewith Tango control system for amulti-technique X-ray spectrometry IAEAbeam line end-station at Elettra Sincrotrone Trieste[J].Nuclear Inst.and Methods in Physics Research,2016,833:105-109.
[13]Chen Shi,Guanghui Teng,Zhuo Li,etal.An approach of pig weight estimation using binocular stereo system based on LabVIEW[J].Computers and Electronics in Agriculture,2016,327:300-326.
[14]Sunil K.Singla.Image-based fingerprint verification system using LabVIEW[J].Maejo International Journal of Science and Technology,2008,2(03):489.
[15]郭美凤,滕云鹤,章燕申.激光陀螺惯性导航系统静态校准方法的研究[J].中国惯性学报,1997,5(4):25-27.
[16]Jianli Li,YanhaiMa,Chen Xiyuan,etal.ErrorModeling,Calibration,and Nonlinear Interpolation Compensation Method of Ring Laser Gyroscope Inertial Navigation System[J].Abstractand Applied Analysis,2013.
[17]E.W.Anderson.Inertia Navigation Systems[J].Journal ofNavigation,1958,11(3):231-258.
[18]王定贤,陈涛,杨欢,王发林.基于LabVIEW的计算机与智能仪器串口通信[J].兰州工业高等专科学校学报,2011,18(5):39-42.
[19]施雅婷,郭前岗,周西峰.一种改进的LabVIEW串口通信系统的实现[J].电子测试,2010,(8):64-68.
[20]蒋萍花,张楠.数据采集系统串口通信的设计与实现[J].电子测量技术,2015,38(6):139-142.
Design of Disp lay and Control System for Laser InertialNavigation Equipment Based on LabVIEW
HUANG Chun fu ZHAFeng
(DepartmentofNavigation,NavalUniversity of Engineering,Wuhan 430033)
The information exchange process of the inertial navigation system is complex,and the amount of information of it is large.So it's necessary to design a convenientand efficientdisplay and control system to realize operation,testand data exchange of the laser inertial navigation equipment.Adisplay and control system of laser inertial navigation equipment is designed by Lab-VIEWgraphical programming languagewhich based on the virtual instrument(VI)technology.Firstly,in linewith the data communication protocol of a laser inertial navigation equipment,the software flow design of the display and control system is completed.Secondly,the function of it is planned and the program is finished according to the users'requirement.Finally,data acquisition experiment,display and control system off-line debugging,hardware and software joint debugging are carried out.The system realizes the analysis and diversified display of the outputof the laser inertialnavigation equipment,and completes the initial parameterbinding and controlof the system state.
inertialnavigation,LabVIEW,display and control,virtual instrument
TP316
10.3969/j.issn.1672-9730.2017.09.007
2017年3月9日,
2017年4月21日
国家自然科学基金项目(编号:41574069;41404002);国家重大科学仪器开发专项(编号:2011yq12004502)资助。
黄春福,男,研究方向:惯性技术及应用。查峰,男,讲师,研究方向:惯性技术及应用。
