地面战场侦察传感器系统分析研究∗
2017-10-23张文强赵博林
张文强 周 彪 赵博林 苏 浩
(空军工程大学防空反导学院 西安 710051)
(68306部队 西安 710600)
地面战场侦察传感器系统分析研究∗
张文强 周 彪 赵博林 苏 浩
(空军工程大学防空反导学院 西安 710051)
(68306部队 西安 710600)
论文阐述了地面战场侦察传感器系统的发展历程,重点对地面战场侦察传感器系统发展的现状及面临的棘手问题进行分析,分类对传感器装备的战技性能进行探究,最后展望了该系统在未来信息化战场上的运用。
地面;战场;侦察;传感器;系统;发展
ClassNum ber TP274
1 引言
地面战场侦察传感器系统是指以战场环境为依托,以信息化为基础,运用地面战场视频弹、侦察雷达、侦察弹、悬浮弹、炮射侦察器等多种形式,为已方提供有价值的信息。实现对战场敌方行动的探测、战场信息实时的传输,提供给指挥员和战场保障人员对整个作战信息空间的及时掌控。
2 地面战场侦察传感器系统发展历程
美军于20世纪60年代首次提出战场侦察传感器系统的理论,其主要功能是:战场上对敌方可实施侦察,对己可警戒监视、提供防敌渗透、入侵报警、防敌偷袭等功能的设备。在越战期间,美军为了监视越军的战场动态,1966年美国国防部成立专门小组,拨款7亿美元研发出了两套地面监视系统,分别配置在越南非军事区的“双刃”系统和在老挝的“白屋”支援封锁系统,这是地面战场侦察传感器的最早的雏形[21]。
1970年,美国国防部牵头各军兵种研发战场传感侦察监视系统,1971年美陆军决定将上述传感器系统归类为“东南亚作战传感器系统(SEAOPASS)”[1]。同时美陆军开始研发可使用于世界各地、全天候的传感器,1972年成立了“伦巴斯(REMBASS)”计划办公室,开始研制最著名的“改进伦巴斯(IREMBASS)”型侦察传感器系统的样机。为了解决侦察系统在战场中的机动问题,前苏联在1972年开始研制具有较强机动性的战场侦察系统(CHAP2),并于当年交付作战部队使用。为解决侦察系统在作战中探测距离问题,1981年英国RACAL公司研制并生产了“克拉西克(CLSSIC)”远距离地面传感器系统,并于次年交付部队使用。此外,英国还有TOBIAS地面震动式战场入侵报警系统和远距离地面传感器系统(HERMES)等[2]。
到20世纪90年代,地面战场侦察传感器系统的功能只是对目标进行探测和分类。但随着科学技术和高速处理器技术的发展,很快实现了实时探测空中和地面目标,识别并确定其大概位置。在越来越多的信息化战争的驱使下,并伴随着现代化智能弹药和精确打击武器的出现,现代化战争中,该系统必将成为作战效能评估的重要手段[3]。现在,地面战场侦察传感器系统已经发展到利用无线传输技术,运用网络组成多个传感器阵列组成分布式的系统,实现信息实时共享。从美军提出地面战场侦察传感器系统以后,世界多个国家在该基础理论上开始对侦察传感器进行研究。经过近半个多世纪的发展,以及近现代几次实战的检验,战场侦察传感器系统现已发展的较为成熟。
3 地面战场侦察传感器系统的现状
各国现有已装备部队的地面战场侦察传感武器系统,主要包括战场侦察雷达、磁性传感器、红外传感器、震动传感器、声响传感器、压力传感器等系统。同其它战场侦察设备相比,地面传感器系统结构相对简单,便于携带埋伏,易于伪装。它可通过飞机空投、人工布设或火炮抛射等方式布置在敌人活动的区域,特别是在其它侦察器材距离达不到、受地物、地形遮挡等情况时,便以可采用战场侦察传感器系统进行侦测[4]。不同类型的传感器的工作方式、适应战场环境有所不同,下面主要就这六种传感器系统进行简要的分析。
3.1 战场侦察雷达
战场侦察雷达,其原理是利用发射机产生高频信号经天线定向地发射出去,再接收空中目标的反回的波束,通过电磁波的多普勒效应来探测目标。当雷达的高频波束内有地面目标和地物时[20],就会产生回波,并由战场侦察雷达天线接收,通过内置的去耦装置进入接收机,回波信号在接收机内经过变换和放大,然后进入多普勒频率选择器,信号经一系列相应的变换后,进入显示器,从而使雷达操作手判断有无目标。通过探测不仅可发现运动目标,而且还可以测量出目标的方位和距离。
美陆军旅级、营级主要装备有中远程地面战场侦察雷达和近程地面战场侦察雷达,主要对巡航导弹、低空飞机、隐身飞机、直升机和地面火炮等目标进行侦测。中远程地面战场侦察雷达采用的是远程、大孔径、相控阵旋转天线的火控和跟踪雷达[19]。该雷达输出功率大,配备有数字自适应波束形成可编程波形发生器。不仅可以侦察巡航导弹和隐身飞机,而且还可以侦测独立机动的战斗部、“低、慢、小”目标和弹道导弹。例如,洛克希德·马丁公司研制的特高频侦察雷达就属于美军的中远程地面战场侦察雷达。近程地面战场侦察雷达一般为便携式装备[5],作战时安装在三脚架或专用车辆上,主要用来执行地面近距离侦察任务,或探测低空飞机、直升机和地面火炮。例如,美陆军侦察营装备的“AN/PPS-15”型雷达,主要用于侦察地面运动和固定的目标,并能测定其方位坐标。该雷达波束很窄,方向分辨率比较高,该雷达有可携出使用的部分,该功能可便于在作战中使用。
近年来,又出现了一种叫做“自适应”的雷达[6],该雷达在外界环境作用下可改变自己的特性参数,便于较好地对周围战场进行探测。因此可以看出,这种雷达在战斗使用的过程中,可靠性程度极高,所获情报的准确程度和可靠程度方面,都比普通雷达要好得多,发展潜力巨大。
3.2 红外传感器
红外传感器一般可分为主动式红外传感器和被动式红外传感器。主动红外传感器是用一对红外发射与红外接收的装置,组成一个红外线的对射系统,如果发射和接收系统之间的不可见光路被挡住,接收机装置就会发出警报信号。被动式红外传感器工作是没有能量之间的传输[7],只是被动的接收能量,以此达到探测环境中的红外辐射的目的。如果区域内没有红外辐射的物体,此时红外辐射的频率保持不变;若有红外辐射的物体通过时,特定的光学系统会使检测设备产生特定的信号,通过预先电路的设定就会产生报警信号。
地面战场侦察传感器系统采用最多的是无源被动式红外传感器,无源被动式红外传感器是利用钽酸锂受热释电的原理而制成的。无源被动式红外传感器通常被隐蔽布设在监视区或者道路附近,当有目标经过时,红外探测装置会接收红外辐射信号,敏感元件就会释放出电荷,变成电信号输出,信号经相应变换后,进入显示器,从而使红外传感器操作手判定有无目标。例如,美国的Indigo系统公司研发的“欧米伽”摄像机[8],重量小于0.12kg,不加镜头的尺寸为3.4×3.7×4.8cm。可用作地面无人值守传感器,工作在长波红外波段,工作温度为-5~60℃,可分辨温差最大为0.075K(K是开氏绝对温标),存储器中可一次性存储500多幅图像。
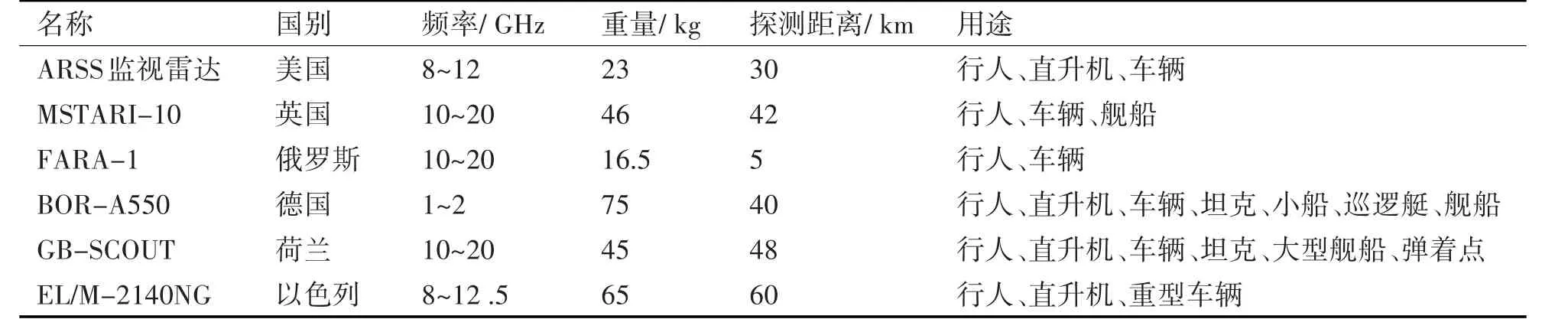
表1 典型战场侦察雷达性能参数表
在地面战场红外侦察传感器系统中最常用的是红外传感器热成像仪,它是利用无源被动式红外传感器的工作原理,通过外部信号处理从而获取景物的热图像,可用于搜索和跟踪目标,红外传感器热成像仪隐蔽性非常好,一般不容易受到干扰。外军装备的夜视瞄准具就是使用红外传感器技术[9],可用作辅助侦察设备,为单兵夜间作战提供了支撑。例如,加拿大本迪克斯·艾弗勒克斯公司和新加坡查特德工业公司联合研制的AN/TAS-502远程夜视仪,该系统重4kg,电池连续工作时间16h;以色列埃尔比特公司研制的YUVAL远程昼夜观察系统[10],采用带微光电视摄像机,该系统可在强阳光下或微弱月光下使用,它可发现30km处的主战坦克,在月光能见度为23.5km,可在16km处识别坦克型号。
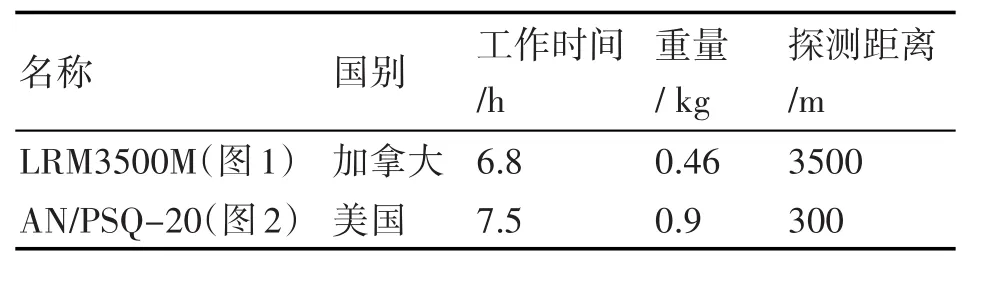
表2 战场红外传感器性能参数表
地面战场侦察传感器系统结构示意图如图1~图3所示[11]。
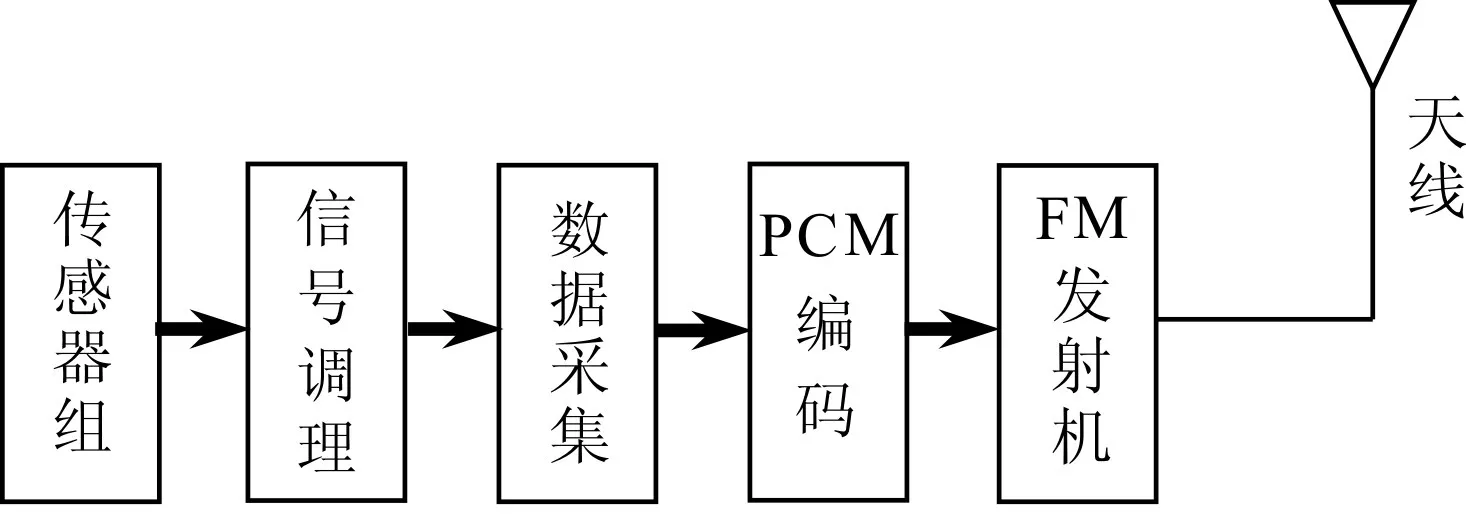
图1 现场站:传感器探测子系统
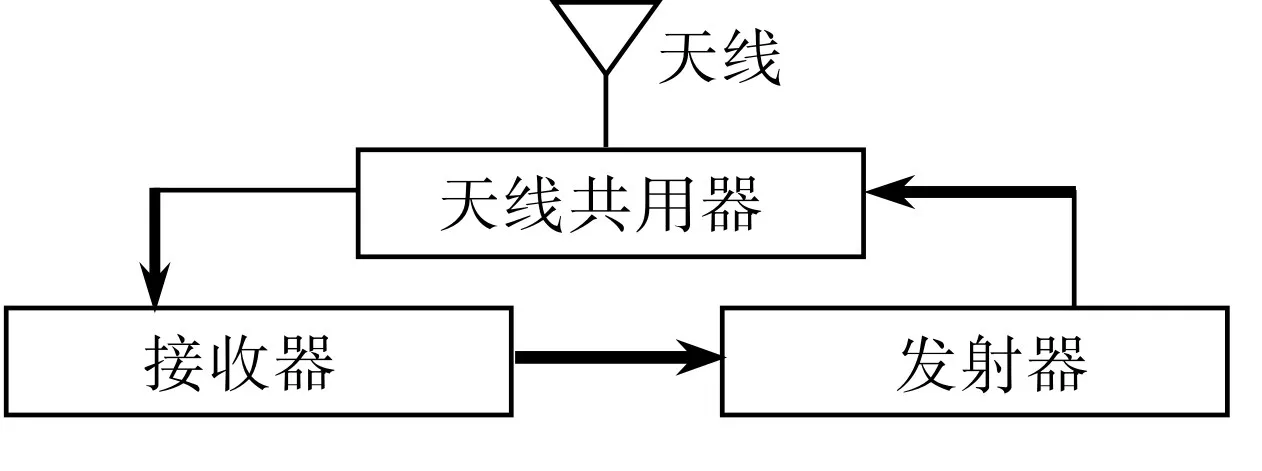
图2 中继站:转发子系统
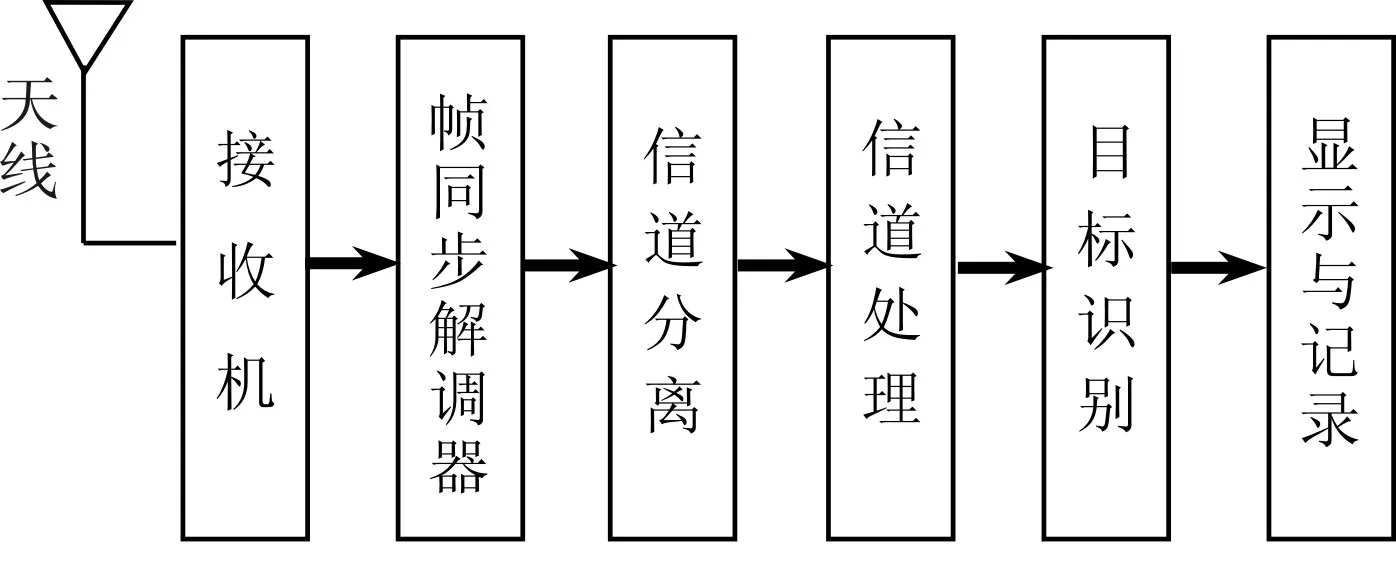
图3 中央处理机:信息处理与目标识别子系统
3.3 声响传感器
声响传感器,是一种收集运动目标发出的声响信号,经处理后可实现对运动目标探测的侦察装置。简单来说,声响传感系统的探测器就像我们日常使用的“话筒”。它可以把目标发出的声音信号转化为电子信号发送给监控中心,监控中心收到电信号后再还原为声音信号,通过此原理对目标进行识别、探测。声响传感器的最大优点是分辨能力强,它能区别出目标的性质,对人员进行监测时,不仅可以直接听到声音,还能根据话音判别国籍、身份信息和谈话内容。如果探测的目标是车辆,则可以根据声响判别车辆的种类,还可判出是人为声响还是自然声响,从而排除自然界的干扰。声响传感器的探测范围也较大,一般对人员正常谈话探测距离可以达到40m,对运动车辆可以达到数百米。
声测传感器的优点是被动作业,不局限于通视条件。声响传感器系统不受假目标的欺骗[12],可昼夜、全天候持续工作,而且还具有边搜索边跟踪的作战能力。例如,20世纪90年代以来,美国科学应用国际公司研制的识别与跟踪声测系统[17]。该系统采用了4个传感器,组成直径约为3m的阵列,可设置在地面或车辆上。配套设备主要是68040型处理器,可同时处理20批目标,可根据声音的特性对车辆和人员发出的声音进行自动探测和定位。该型传感器设备已交付使用,主要应于无人驾驶地面侦察车上;法国塞里萨公司在上世纪末研制可在沙漠地区探测直升机的RACHID型声测系统,该系统使用的是太阳能供电,可由便携式计算机控制,最大可对正面宽20~30km的12个传声器阵列的收集来的数据同时进行处理。
然而,声响传感器耗电量较大,所以,战场声响传感器一般是人工指令信号控制,或与震动传感器并联使用。其原理是:平时震动传感器处于工作状态,声响传感器处于关机状态。一旦震动传感器探测到目标,再开启声响传感器,从而就可以把震动传感器耗电少与声响传感器鉴别目标能力强的两个优点结合起来,相互配合完成探测任务的目的。
3.4 震动传感器
震动传感器工作原理类似于记录震波的地震仪,是传感器中使用最为普遍的一种。这种传感器在探测目标时,主要是通过震动探头捕捉目标的活动情况,从而来探测目标。通常测震器要设在地表层,当目标经过附近时,传感器将目标引起的震动信号转化为电信号,经放大处理发给监控中心,监控中心进而进行实时的战场监测。
震动传感器探测灵敏度高、距离远,通常可探测到30m以内的人员和300m以内的车辆。震动传感器还具有一定的分辨能力,不仅可区分人为的震动与自然震动,还能区分震动目标的种类。震动传感器的耗电量很少,自带电池可使用数月不需更换,传感器可在开启后不间断地进行监视,目标很难逃脱。震动传感器的探测距离会受地面土质变化的影响:如土质硬,探测距离远;土质软,探测距离近[8]。
3.5 磁性传感器
磁性传感器又称遥控电磁传感器,它的主要侦测装置为一个磁性探头。工作原理是磁性探头连续发出无线电信号,在探头周围形成一个静的磁场,当铁磁金属制成的物体(如步枪、车辆等)进入该磁场,就会产生一个新的磁场,从而破坏了原来的静磁场。由于目标的运动使静磁场发生了变化,引起磁性探头指针的偏转与摆动,产生对应的电信号,系统将电信号发往监测中心。磁性传感器鉴别目标性质的能力强,对目标探测的反应速度快,能探测快速运动的目标,从而实现对人和车辆的探测。
磁性传感器对目标探测的能力较强,可区分徒手人员、武装人员和各种车辆;同时,对目标探测的反应速度也较快,一般为2.5s,可实时探测快速运动的目标。同其它传感器对比,磁性传感器能适应多种环境下的战场侦察,可适用于震动传感器难以探测的沼泽、水网地区,弥补了震动传感器的不足。例如,美国L-3通信公司的“远距离监控战场传感器系统”属于无人值守地面传感器系统,该系统是通过磁性传感器对目标进行探测和分类。最新型无人值守地面传感器系统可以探测75m处的人员、500m处的轮式车辆和750m处的履带装甲车辆。
3.6 压力传感器
压力传感器,或称应变电缆传感器,探测器是一根极细的应变电缆,战场使用时应埋设在目标可能通过的路面下。当目标通行时压过浅埋的应变电缆时,电缆因受挤压而产生变形,电缆上电阻发生变化,产生电信号,起到报警作用。压力传感器是使用最早、种类最多的传感器,美军在越战中,就投入了大量的压力传感器,对战场进行监测。与其它传感器相比,压力传感器的优点是信息判断准确、虚警率低、抗电磁干扰能力强、响应快等[6]。但这种传感器只有当运动目标通过电缆时,才能发现目标,并且不具备敌我识别功能,探测范围通常只有30m左右,所以在野战使用中有很大的局限性。
4 地面战场侦察传感器研究面临的问题
4.1 持续作战能力问题
地面侦察传感器的持续工作时间是信息采集的基础,现阶段制约传感器发展的主要因素是供电问题。通常为了提高隐蔽性,传感器的设计的一般都特别小,或者做成动物、植物的外形,以此作为伪装,迷惑敌人。然而,传感器小体积中既要容纳各类器件,还有工作电源,在狭小的传感器内,既要保证功能的完备,又要保证工作的持续时间,以后的研究,必将要在体积与电源问题上进行平衡处理。
4.2 信息传输保密问题
地面战场侦察传感器得到的信息,往往需要直接或间接以无线电信号的方式传到情报中心。然而搜集的信息在传输过程中极有可能被敌方侦测截获,现阶段通常采用的是数据压缩技术,尽可能减少发送时间,以此来降低被截获的机率。在战场条件允许的情况下,也可采用军用无线通讯技术,如跳频、加密等方法增强信息的安全性,但这些装置会增加传感器的重量、体积,不便于投放,而且也会增大被敌发现的概率。
4.3 多传感器数据融合问题
多传感器信息的数据融合及敌我识别是一项较为棘手的问题,是防止“虚警”和“漏警”的关键技术。信息化战场上成千上万个传感器同时收集战场数据,这些数据通过不同的方式传到监控中心,监控中心以一个什么样的统一化的标准进行归类区分,把同一个目标在不同传感器上收集的信息进行整合,并进行敌我识别,对有用信息进行筛选、融合,传输给情报中心。然而,情报中心面对大量的战场传回数据,现阶段还没有一个高效的归类融合系统,有可能导致错失战机。
5 结语
西方发达国家的战场侦察传感器系统已经投入实战使用,而我国还处于起步阶段,虽然近年来取得了一些成果,但是差距还很大。现阶段我军战场传感器主要采用战场视频手段对战场态势进行掌控,例如用火炮发射至敌方上空的战场视频弹、战场悬浮弹等。我军应该在汲取外军多功能传感器的基础之上,主要从微型化、网络化、便捷使用、信息处理的角度去展开研究。随着战场信息化程度越来越高,传感器系统必将成为采集态势信息的重要手段,充分运用好地面战场侦察传感器,及时、准确掌握战场动态,紧握作战时节才是制胜的关键。
[1]刘先省.传感器管理方法研究[D].西安:西北工业大学,2000:53-55
[2]石章松,王辉华,王航宇.协同传感器管理体系结构及方法[J].电子器件,2005,38(9):571-576.
[3]梁继民,多传感器决策融合方法研究[D].西安:西安电子科技大学,1999:5-9.
[4]陈继军,多传感器管理及信息融合[D].西安:西北工业大学,2002:7-11.
[5]朱斯平,战场多传感器管理系统研究[D].成都:电子科技大学,2011:21-25.
[6]周开利,陶然,王越等.多传感器ATR系统中传感器的选配[J].系统工程与电子技术,1999,21(12):57-59.
[7]芦建辉,陈东锋,万朝江等.主被动传感器实时信息融合的 STMHM算 法[J].电 子 学 报 ,2012,40(9):1740-1745.
[8]张明友.雷达电子战通信一体化概论[M].北京:国防工业出版社,2010:55-58.
[9]刘志春,袁文,苏震.美国舰载电子战系统的发展[J],舰船电子工程,2008,168(6):30-34.
[10]胡笑旋,张强.多传感器协同管理机制研究[C]//中国仪器仪表学会第九届青年学术会议论文集,北京,2007:43-46.
[11]赵玉,吴华等.先进战机射频集成系统干扰资源管控[J],电子与控制,2013,6(6):7-11.
[12]沈洋,李修和,陈永光.一种新的压制性干扰技战术研究[J].电子与信息学报,2008,30(5):1068-1071.
Current Development and Outlook of G round Reconnaissance Sensor System
ZHANGWenqiang ZHOU Biao ZHAO Bolin SU Hao
(Airand Missile Defense College,Air Force Engineering University,Xi'an 710051)
(No.68306 Troopsof PLA,Xi'an 710600)
The paper describes the development course ofground reconnaissance sensor system,focuses on the analysis of the current development and difficult issues of the ground reconnaissance sensor system,and researches on the tactical and technical performance of classified sensor equipment.Finally,it prospects the application of the system used in the future information battlefield.
ground,battlefield,reconnaissance,sensor,system,actuality
TP274
10.3969/j.issn.1672-9730.2017.09.004
2017年3月6日,
2017年4月28日
张文强,男,研究方向:防空兵地面战场任务规划模块。周彪,男,硕士研究生,研究方向:防空反导战术。赵博林,男,研究方向:军队指挥。苏浩,男,硕士研究生,研究方向:防空识别区问题。
