电动变桨式潮流能水轮机获能分析与应用
2017-10-12谭俊哲闫家政王树杰
谭俊哲,闫家政,王树杰,陈 震,袁 鹏
(1. 中国海洋大学 工程学院,山东 青岛 266100;2. 青岛市海洋可再生能源重点实验室,山东 青岛 266100)
电动变桨式潮流能水轮机获能分析与应用
谭俊哲1, 2,闫家政1,王树杰1, 2,陈 震1,袁 鹏1, 2
(1. 中国海洋大学 工程学院,山东 青岛 266100;2. 青岛市海洋可再生能源重点实验室,山东 青岛 266100)
我国具有丰富的潮流能资源,但是存在潮流流速偏低、难以高效利用等问题。潮流能水轮机变桨距技术的利用,可有效提高潮流能资源利用效率。以提高潮流能水轮机高效获能为目标,分析了水轮机叶片桨距角对潮流能水轮机获能的影响规律,研究了水轮机变桨距技术原理及控制策略。在20 kW潮流能水轮机中运用了电动变桨距技术,根据潮流流速的不同,使用最大功率点追踪控制算法控制桨距角,并对机组运行过程进行实时测试。机组运行数据表明,与非变桨水轮机相比,变桨式潮流能水轮机可有效提高其获能效率。
潮流能水轮机;变桨距;获能效率;最大功率点追踪算法;尖速比
Abstract: China is rich in tidal energy resources, but the problems of low speed and low efficiency of tidal current puzzle the researchers. The efficiency of tidal energy is effectively increased by applying variable-pitch technology to tidal turbine. In order to improve the energy capture efficiency, the relationship between pitch angle of blade and turbine capacity is analyzed, and the principle and control strategy of variable-pitch technology is studied. Variable-pitch technology is applied in 20 kW tidal turbine, pitch angle is adjusted by maximum power point tracking algorithm and the operating condition is tested in real time. Operation data show that the tidal turbine can increase the power capture efficiency by using variable-pitch control technology, compared with the fixed-pitch angle tidal turbine.
Keywords: tidal turbine; variable-pitch; power capture efficiency; maximum power point tracking algorithm; tip speed ratio
近年来,能源以及环境问题对人类社会的发展形成了隐形的威胁,常规化石燃料储存量的缩减及环境污染日益严重,迫使人类寻找清洁可再生能源作为替代能源[1]。潮流能作为一种清洁能源,具有蕴藏量大、无污染可再生等特点[2-4],越来越多地受到新能源研究人员的青睐。我国的潮流能资源虽然丰富,但由于所处地理位置等原因,总体来说,我国潮流流速较小、水深较浅。针对这种资源状况,客观上需要开发一种符合我国潮流能资源的获能装备。水平轴水轮机桨距角的大小会影响水轮机获得能量的效率。采用水平轴水轮机变桨距技术,不仅可以实现在不同流速下获得更大的功率,而且使用大转角的桨距变换,可以使水轮机适应双向的潮流环境,从而提高潮流能发电装置的综合利用效率。
潮流能水轮机的变桨距方式多种多样,比如英国MCT公司研制的水平轴潮流能发电装置“SeaGen”,利用柱桩式结构,水轮机转子直径为16 m,采用了电动变桨方式[5-6],可以实现180°变桨,以适应双向的海流。英国伦敦大学学院垂直轴潮流能发电装置采用了液压形式的变桨机构[7]。浙江大学研制的水平轴潮流能发电样机采用了液压形式的变桨机构[8]。中国海洋大学设计研发的“海远I”和“海远II”号发电机组采用半直驱和变桨距相结合的形式[9],总装机功率为100 kW,实现了水轮机的低流速下高效获能。
以提高潮流能水轮机高效获能为目标,分析了叶片桨距角对水轮机获能的影响,对水轮机转子进行了数值模拟,得出了不同桨距角下,转矩系数与尖速比的关系。研究了水轮机电动变桨机构以及控制策略原理。并对20 kW潮流能水轮机进行了运行数据测试,根据实测数据分析了变桨机构对水轮机转速以及功率获取的影响,为以后设计高效获能的水轮机提供了依据。
1 叶片桨距角对水轮机获能的影响
潮流能水轮机的主要作用为将海水往复运动时的动能转化为机械能,其获能效率是评价潮流能发电系统的关键指标之一。水轮机从潮流中获取的能量用获能系数CP表示,其功率P与获能系数CP的关系:
式中:P为水轮机功率,W;ρ为海水密度,kg/m3;V为潮流流速,m/s;R为转子半径,m;CP(λ,β)为获能系数。
由式(1)可知,在水轮机叶片参数确定以及潮流速度一定的情况下,水轮机功率只与获能系数有关。同时,获能系数CP又可表示为尖速比λ与桨距角β的函数。其中尖速比λ为叶轮尖端线速度与潮流流速之比。尖速比可表示为:
式中:ω为叶轮旋转角速度,rad/s;R为转子半径,m;n为转子转速,r/min。
由式(2)可知,转子转速的改变以及潮流流速的变化,都会引起获能系数的变化,进而改变水轮机输出功率。
获能系数CP(λ,β)可以使用以下公式来计算[10]:

当叶片桨距角为定值时,获能系数CP主要由尖速比λ决定。图1所示为桨距角一定时,获能系数随尖速比变化曲线图。
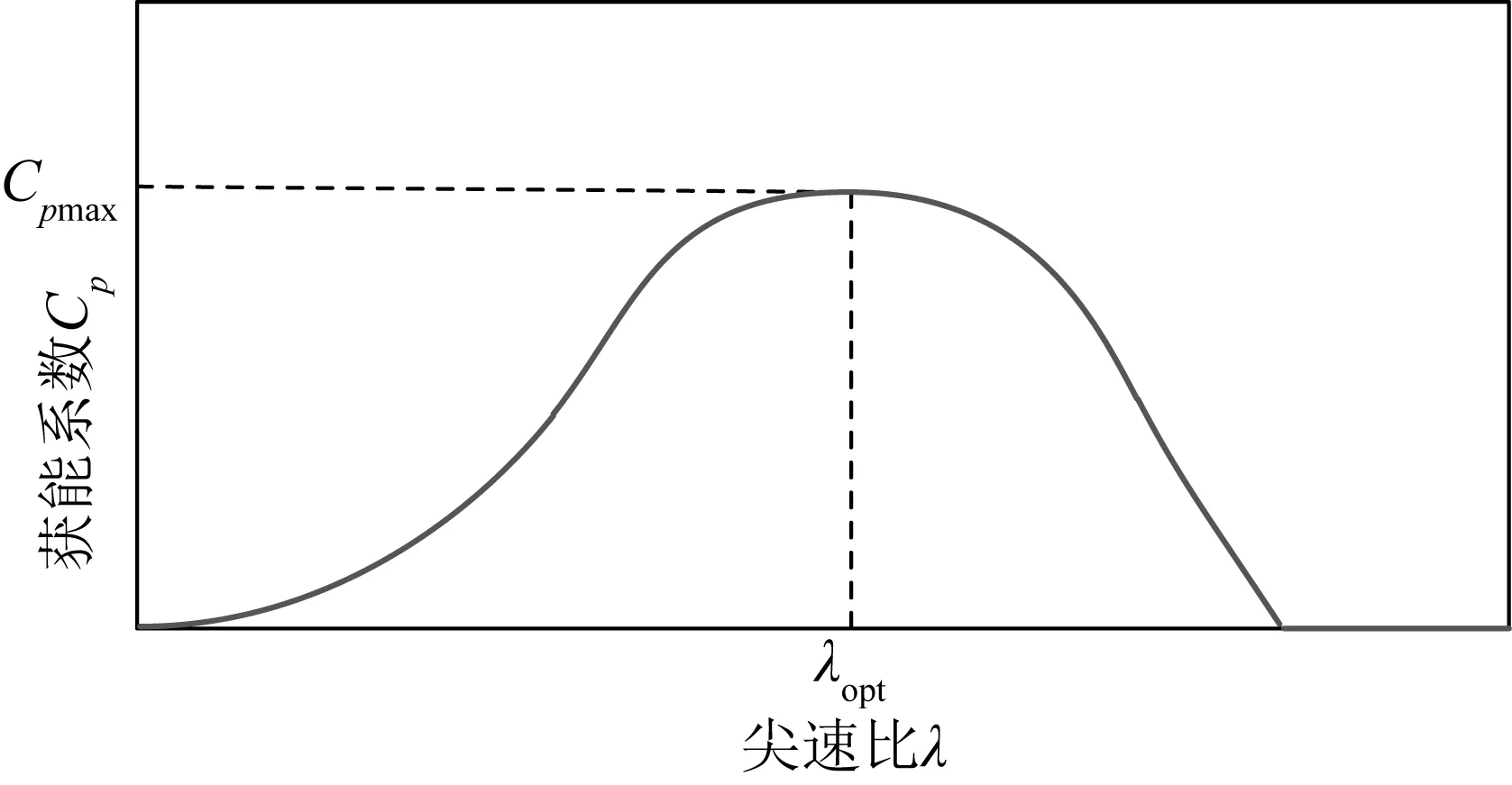
图1 获能系数与尖速比关系曲线Fig. 1 The curve of power coefficient and tip speed ratio
由图1可知,水轮机由起动到转速稳定,对于任意桨距角的叶片,获能系数随着尖速比的增大而先增大后减小,同时不同桨距角,总存在一最佳的尖速比使其获能系数达到最大值Cpmax。
水轮机功率P可表示为叶轮旋转角速度ω与叶轮转矩Ta的关系:

图2 转子转矩系数随尖速比的变化关系Fig. 2 Relationship between rotor torque coefficient and tip speed ratio
进而可得叶轮转矩的函数式为:
为研究桨距角对水轮机转子转矩之间的关系,以20 kW变桨式潮流能水轮机为例进行仿真分析。根据水轮机转子实测数据进行三维建模,分别对桨距角为0°、3°、5°、8°、10°以及15°的水轮机转子进行数值模拟,得出不同桨距角下,水轮机转子尖速比与其转矩系数的关系如图2所示。
由仿真结果可知,对于不同桨距角的水轮机转子,随着尖速比的增大,水轮机转子的转矩系数呈现先增大后减小的趋势,都存在一个可以使水轮机转子的转矩系数达到最大值的尖速比。由式(5)可知,在水轮机转子角速度一定的情况下,水轮机获能系数的变化趋势与转矩系数相同。故可通过调节叶片桨距角以改变尖速比调节水轮机获能功率。
2 潮流能水轮机变桨距技术
2.1变桨距技术
潮流能水轮机变桨距装置可以根据潮流的流速以及流向的不同,改变叶片的桨距角。通过改变桨距角,改变潮流对叶片的攻角,从而改变水轮机转子所受的转矩,进而改变水轮机的转速。根据不同潮流流速,选择合适的桨距角,可以使水轮机工作于最大功率处。同时,当潮流流速过高时,通过改变桨距角的大小,改变潮流对水轮机叶片的攻角,从而减小水轮机转子转矩,使功率输出维持在平稳状态[11]。变桨控制是提高潮流能机组发电效率,保证整个系统安全、可靠和稳定运行的关键环节。对于中大型潮流能机组,变桨控制系统尤为关键,也是未来潮流能发电机组商业化的必备技术之一。
潮流能水轮机根据潮流流速来控制启停以及运行状态,其理想运行曲线如图3所示。水轮机运行范围分为三个区域:区域1为低流速区域,在此区域内,水轮机转子所受的转矩不足以起动水轮机,水轮机处于停转状态;区域2为中等流速区域,随着流速的增大,水轮机得以起动,且水轮机输出功率随流速的增大而增大,流速达到V2时,水轮机达到额定功率;区域3为高流速区域,在此区域内,通过改变水轮机叶片的桨距角,将水轮机输出功率维持在额定功率处,以实现功率输出的最大化,并避免飞车等危险。

图3 理想潮流能水轮机运行曲线Fig. 3 Ideal running curve of tidal turbines
根据潮流能水轮机变桨距传动方式的不同,可以分为电动和液压变桨距机构,电动变桨距机构机械部分传动链为变桨电机、减速器、锥齿轮传动带动叶片转动。与液压变桨机构相比,电动变桨机构具有结构紧凑、控制精准、无反馈响应滞后、容易实现最大能量追踪算法等特点。由于20 kW潮流能水轮机的轮毂内部空间较小且变桨载荷相对不大,更适合采用电动统一变桨机构。潮流能水轮机变桨系统的组成结构如图4所示,系统采用计算机控制,控制变桨电机通过减速器驱动叶片旋转,改变叶片的桨距角。系统机构紧凑,控制简单可靠。

图4 潮流能水轮机变桨系统结构图Fig. 4 Configuration diagram of tidal turbine pitch system
2.2变桨距控制策略
潮流能水轮机变桨系统控制策略如图5所示。由于流速是随时间变化的,据式(2)及图1可知,只要调节叶轮转速随流速变化,并保持叶片尖速比为固定值λopt,即可在额定流速之下使水轮机获得最佳的功率系数;当流速高于额定流速时,水轮机叶片根据实际流速进行顺桨,使水轮机工作在额定功率处并保持稳定。其流程为将海流计所测得潮流的流速流向数据与实时检测的发电机状态参数传输到变桨距系统,通过计算得出此时叶片的实际叶尖速比,然后与最优叶尖速比λopt相比较,将所得误差送入控制器,控制器将桨距角等数据指令发送到变桨距控制器,完成水轮机叶片的桨距角改变。同时水轮机变桨距角之后发电机状态参数反馈到控制系统,形成闭环控制,以实现水轮机能量获取的最大化[12]。
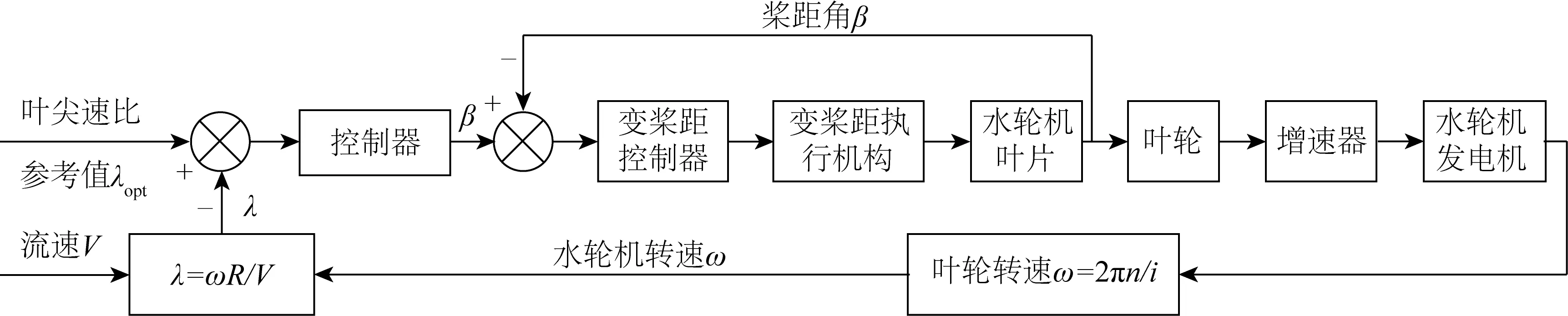
图5 潮流能水轮机变桨系统控制框图Fig. 5 Schematic diagram of tidal turbine pitch control system

图6 流速、系统功率和桨距角的关系Fig. 6 The relationship of velocity, system power and pitch angle
图6为潮流流速与水轮机获能以及叶片桨距角度之间的关系图。将潮流流速简化为正弦波,下面给出了对应的机组功率与桨距角的波形。
1) 当潮流流速在点A和点B之间时,水轮机处于起动阶段,此时应将叶片桨距角度调整为较大的桨距角,以获得较大的转矩,使得水轮机在低流速下起动;
2) 当潮流流速处于点B和点C之间时,据变桨距控制算法,根据水流流速调整桨距角,以获得最大的能量;
3) 当潮流流速处于点C和点D之间时,潮流流速大于额定流速,控制系统控制进行顺桨操作以减小机组获能,以防止发生飞车等危险;
4) 当潮流流速处于点E和点F之间时,潮流流向反向,控制系统控制叶片反向以适应双向潮流的运行。
3 实测数据分析
为进一步验证变桨式潮流能水轮机对获能效率的影响,在20 kW潮流能水轮机的研制中采用了变桨距机构。潮流能发电装置的海试海域水深约为12 m,设计额定流速为1.7 m/s。机组采用半直驱的传动方式,潮流能水轮机转子的转动,通过主轴、增速器传递至发电机发电。通过对20 kW潮流能水轮机进行了数据测试,分析变桨距机构对获能效率的影响效果。
3.1潮流能水轮机空转运行实测
为了测试水轮机在实际海域环境中的发电功率,研究桨距角与发电机转数的关系,同时保证系统的稳定性,首先对空转运行的水轮机的参数进行测试。以落潮阶段对发电机进行转速测试的数据为例进行分析,此阶段内潮流流速在0.35~0.75 m/s之间时,通过调整桨距角,得到水轮机转速的变化如图7所示。
由图7可知,此次实测测试时间共1 h 20 min,其中桨距角由最初的45°开始缓慢减小到5°,每个角度持续时间约为5 min。落潮时,潮流的流速在0.35~0.75 m/s之间不稳定变化。在最初位置,水轮机桨距角为45°,此时潮流的流速约为0.45 m/s,水轮机即完成了自起动,但由于桨距角过大,转子受到的转矩较小,故此阶段水轮机的转速也较低。在流速较稳定的阶段内,随着桨距角的减小,转速呈现逐渐增加的趋势,说明随着桨距角的减小,水轮机的获能功率正在增加。
当水轮机桨距角为5°~10°时,水轮机转数不稳定,并且出现了转数急剧下降的情况,主要原因是当流速较低并且桨距角很小时,水轮机转子受到的扭矩减小、轴向力增加以及水轮机低速旋转时所受的机械摩擦力增大造成的。这说明了在较低流速下,采用较大的桨距角有利于水轮机的自起动和转速运行的稳定性。

图7 水轮机空载时变桨测试实时数据Fig. 7 The real time data of turbine without load

图8 水轮机带负载运行测试实时数据Fig. 8 The real time data of turbine with load
3.2潮流能水轮机负载运行实测
为了较为直观地分析水轮机变桨距角对水轮机获能的影响,在海试中为水轮机连接负载,测得潮流能水轮机带负载时的运行实测曲线如图8所示。
系统在初始时刻,水轮机不带负载,系统将水轮机的叶片桨距角调整到30°等待起动。当流速达到约为0.45 m/s时,水轮机得以自起动,此时潮流流水轮机转速较低并且不稳定。由于水轮机不带负载,输出功率接近于零。当为水轮机加上负载后,水轮机转速降低。随着潮流的流速增加,将叶片桨距角自动调整至大约20°,水轮机转速增加并保持稳定,水轮机功率增至2.5 kW后保持稳定。在大约20 h 20 min时刻,由于流速的降低,为了维持系统功率的稳定性,水轮机桨距角有一个较大的突变。随后由于流速的增大,系统自动跟踪最大功率点,水轮机桨距角不断减小,当桨距角减小至约3°时,水轮机功率达到最大并保持稳定,其最大功率约为12.5 kW。此后,由于此时潮流的流速较大,水轮机功率随流速的变化而变化。
在23 h 30 min时刻,随着一个潮流周期的结束,潮流的流速不断减小,为了尽可能多地获得潮流资源,水轮机桨距角重新增大至30°,但此时潮流的流速较小,水轮机功率也很小。当一个潮流周期完成之后,水轮机桨距角反转至0°以下适应反向潮流进行获能。
由此可见,低流速时,通过变桨距系统调整桨距角完成水轮机起动;待到高流速时,系统自动调整桨距角,以获得较高的发电效率。
在相同的桨距角下,水轮机的功率主要与潮流的流速有关;在相同的流速下,可以通过改变桨距角的大小,来改变水轮机瞬时的发电功率。
4 结 语
对潮流能叶片桨距角变化对获能效率的影响规律进行研究,并用数值模拟的方法得出了不同桨距角下尖速比与转子转矩系数的关系,介绍了电动变桨距的结构和变桨距控制原理,通过对海试中的变桨式潮流能水轮机进行了实时数据测试,得出以下结论:
1)潮流能水轮机可以通过变桨距技术来实现低流速起动,并且能够适应双向潮流的运行。
2)变桨控制系统采用最大功率点追踪控制算法,根据潮流流速的变化,优化水轮机的叶片桨距角,实现能量获取的最大化。
3)根据实测数据,得出了桨距角与其水轮机获能的关系、潮流的流速与功率的关系,并对仿真结果进行验证,为以后的潮流能水轮机高效获能技术研究和潮流能水轮机设计提供了参考。
[1] BAHAJ A S, MOLLAND A F. Power and thrust measurements of marine current turbines under various hydrodynamic flow conditions in a cavitation tunnel and a towing tank [J]. Renewable Energy, 2007, 32(4): 407-426.
[2] FERREIRA R M, ESTEFEN S F. Alternative concept for tidal power plant with reservoir restriction [J]. Renewable Energy, 2009,34(4): 1151-1157.
[3] PONTA F, JACOVKIS P. Marine-current power generation by diffuser-augmented floating hydro-turbines [J]. Renewable Energy, 2008, 33(4): 665-673.
[4] ROURKE F O, BOYLE F, REYNOLDS A, Renewable energy resources and technologies applicable to Ireland [J]. Renewable and Sustainable Energy Reviews, 2009, 13(8): 1975-1984.
[5] BURTON T, JENKINS N, SHARPE D, et al. Wind Energy handbook [M]. Chechester: Wiley, 2001.
[6] BEN ELGHALL S E, BENBOUZID M E H, CHARPENTIER J F. Marine tidal current electric power generation technology: State of the art and current power status [C]//Proceedings of the IEEE International Electric Machines and Drives Conference. 2007:1407-1412.
[7] SCHONBORN A, CHANTZIDAKIS M. Development of a hydraulic control mechanism for cyclic pitch marine current turbine [J]. Renewable Energy, 2007, 32(4): 662-679.
[8] 马舜, 李伟, 刘宏伟, 等. 水平轴潮流能发电机组变桨距系统研究 [J]. 太阳能学报, 2002, 32(11): 1605-1610. (MA Shun, LI Wei, LIU Hongwei, et al. Study on blade pitching system for horizontal axis tidal current turbine [J]. Acta Energiae Solaris Sinica, 2002, 32(11): 1605-1610.(in Chinese))
[9] 邱飞. 水平轴潮流能发电装置海洋环境载荷与可靠性分析 [D]. 青岛: 中国海洋大学, 2012. (QIU Fei. Environmental load and reliability analysis of horizontal axis turbine tidal current power generation [D]. Qingdao: Ocean University of China, 2012. (in Chinese))
[10] MENA LOPEZ H E. Maximum power tracking control scheme for wind generator systems [D]. Texas A&M University, 2007.
[11] 厉文超. 水平轴潮流能水轮机最大功率捕获技术研究 [D]. 青岛: 中国海洋大学, 2011. (LI Wenchao. Research on maximum power capture technology for horizontal axis tidal current turbine [D]. Qingdao: Ocean University of China, 2011. (in Chinese))
[12] CARDENAS R, PENA R. Sensorless vector control of induction machines for variable-speed wind energy application [J]. IEEE Transactions on Energy Conversion, 2004, 19(1): 196-205.
Energy capture analysis and application of tidal turbine with electric pitch control system
TAN Junzhe1, 2, YAN Jiazheng1, WANG Shujie1, 2, CHEN Zhen1, YUAN Peng1, 2
(1. College of Engineering, Ocean University of China, Qingdao 266100, China; 2. Ocean Engineering Key Lab of Qingdao, Qingdao 266100, China)
P754.1; TK73
A
10.16483/j.issn.1005-9865.2017.03.009
1005-9865(2017)03-0070-06
2016-07-17
国家863计划资助项目(2012AA052601);国家自然科学基金项目(51279191)
谭俊哲(1972-),男,山东人,副教授,主要从事海洋机电装备仪器研发工作。E-mail:tanjunzhe_cn@163.com
