10 MW级海上浮式风机运动特性研究
2017-10-12徐应瑜胡志强刘格梁
徐应瑜,胡志强,刘格梁
(1. 上海交通大学 海洋工程国家重点实验室,上海 200240; 2. 上海交通大学 高新船舶与深海开发装备协同创新中心,上海 200240)
10 MW级海上浮式风机运动特性研究
徐应瑜1, 2,胡志强1, 2,刘格梁1, 2
(1. 上海交通大学 海洋工程国家重点实验室,上海 200240; 2. 上海交通大学 高新船舶与深海开发装备协同创新中心,上海 200240)
以DTU 10 MW基准风机为研究对象,单柱式平台作为基础支撑结构,使用FAST软件计算分析,考虑单独风、单独波浪以及风浪组合三种环境条件,对10 MW级海上浮式风机的运动特性进行研究。研究发现:系统摇荡是风激励的低频运动和波浪激励的波频运动的合成,气动阻尼削弱系统的波频运动;系统纵荡和纵摇运动存在明显的耦合现象,而垂荡运动和其他方向的运动没有耦合关系;受纵摇影响,转动的风轮产生陀螺惯性力矩,激励首摇运动;随着风机单机容量的增加,风激励的低频运动比例增大,波浪激励的波频运动比例减小。
浮式风机;运动特性;气动阻尼;耦合;陀螺惯性力矩
Abstract: In this paper, a numerical analysis is made on the DTU 10MW reference wind turbine supported by a spar-type platform, through the using of FAST code. Kinetic characteristics of the 10 MW offshore floating wind turbine is investigated considering wind only, wave only, and wind-and-wave cases. The results indicate that the oscillation of the system is synthetic motions of low frequency oscillation induced by wind and wave frequency oscillation induced by wave. Aerodynamic damping weakens the wave frequency oscillation of system. Surge and pitch motions have a strongly coupling effect with each other, but heave motion is independent. Motion in yaw is induced by gyroscopic inertia moments derived from rotor spinning and platform pitch. Proportion of motions in low frequency increases, while proportion of motions in wave frequency decreases with the upscaling of wind turbines.
Keywords: floating wind turbine; kinetic characteristics; aerodynamic damping; coupling; gyroscopic inertia moments
风能以其储量大、可再生等优势,成为新能源开发的热点。相比于陆上风能,海上风能具有风速高、风况稳定、选址不受空间限制等优势,海上浮式风机成为开发利用风能的必然选择。海上浮式风机基础主要有四种,分别为驳船型、单柱式、半潜式和张力腿式。相较于传统陆地风机,海上浮式风机面临着复杂的海洋环境条件,系统的大幅度运动会导致风机功率的波动,引起电力输出的不稳定性[1],对风机系统的输电质量和运行安全有着至关重要的影响。美国可再生能源实验室基于空气动力载荷模块AeroDyn集成了海上浮式风机系统耦合性能分析工具FAST[2],Jonkman等[3]用此程序研究了驳船型5 MW浮式风机在风浪载荷中的动力响应;Nielsen等[4]综合应用陆上风机仿真软件HAWC2和海洋结构物动力响应分析程序SIMO/RIFLEX,研究了单柱式浮式风机在风浪条件下的动力响应;Ma等[5]使用FAST软件,分析了单柱式浮式风机在典型环境条件下的运动性能和锚链载荷;Li等[6]用Matlab编写了模拟半潜式浮式风机运动响应的代码,并用模型实验进行验证。
目前在海上安装应用的大型风电机组主要为3~5 MW级,随着海上风能资源开发的深入,10 MW级风机成为了新的研究热点。丹麦科技大学风能协会和维斯塔斯风力技术公司合作成立了一个名为Light Rotor[7]的项目,提出多种10 MW级风机的概念设计。挪威海上风能技术研究中心在丹麦科技大学提出的10 MW风机系统的基础上,也提出一种10 MW基准风机。NTNU的Aina Crozier[8]和Kasper Sandal[9]等人对10 MW级风机的风轮设计和控制系统展开了一定的工作;肖京平等[10]在10 MW风机的气动设计方面提出了一定的设想。
以DTU 10 MW基准风机为研究对象,单柱式平台作为基础支撑结构,使用FAST软件计算分析,探讨10 MW级海上浮式风机在风浪联合作用下的运动特性,对10 MW级海上浮式风机的研究具有重要意义。
1 风机主要参数
DTU 10 MW基准风机是根据经典相似准则,对NREL 5 MW基准风机[11]放大设计的。表1中列出了DTU 10 MW基准风机的主要参数,包括风轮、机舱和塔架,详细的数据参见文献[12]。平台和锚链的主要参数也见表1,浮式风机的总体示意图,如图1所示。
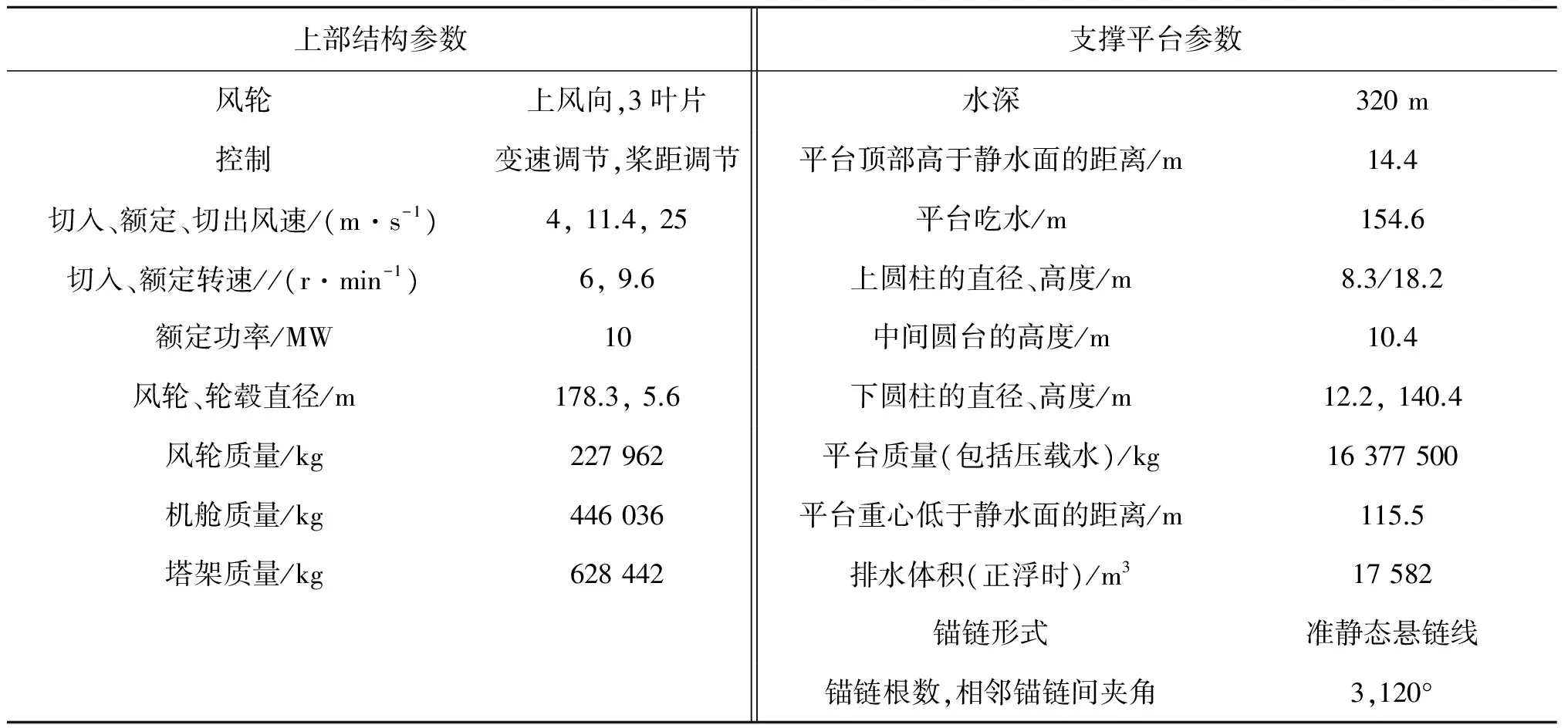
表1 浮式风机的主要参数Tab. 1 Main parameters of the floating wind turbine
2 浮式风机运动性能理论
浮式风机系统的时域运动方程:

1) 重力
系统的重力主要由叶片、轮毂、机舱、塔架和平台产生。
2) 气动力
气动力由升力和阻力组成,使用叶素动量理论(BEM)[13]来计算,叶素动量理论是叶素理论和动量定理之间的相互耦合。叶素理论是将风轮沿径向划分为若干微元段(叶素),各叶素间相互独立,互不影响,视为二维翼型;根据局部流动条件,计算每个叶素的气动力,并沿径向积分,计算出作用在风机上的总气动力和力矩。动量定理是由流动动量损失计算出每个叶素的轴向与切向诱导速度,这些诱导速度影响风轮平面的入流速度,进一步影响到作用在叶素上的气动力。叶素上的受力如图2所示,气动载荷可由下式得出:
式中:δFL为叶素上的气动升力;δFD为叶素上的气动阻力;CL为与翼型、入流角相关的升力系数;CD为与翼型、入流角相关的阻力系数;ρ为空气密度;Vrel为相对入流速度;c为叶素的弦长;δr为微元厚度。
3) 波浪激励力
波浪和浮体相互作用时,一般最多考虑到二阶速度势,作用在浮体上的波浪激励力有一阶波浪激励力和二阶波浪激励力。
在本文的水动力计算模块中,只计入一阶波浪激励力,这对于单柱式基础的浮式风机也是合理的。研究中利用WAMIT软件[14]计算得到的一阶波浪激励力频域响应函数,根据时频域转化方法计算时域一阶波浪激励力。频域内的一阶波浪激励力计算公式:
式中:fwj为对应于j运动模态的一阶波浪激励力;ρ为海水密度;ω0为波浪自然频率;S0为系统置于静水中的湿表面积;φI为入射波速度势;φj为对应于j运动模态的速度绕射势。
4) 锚链力
应用准静态悬链线模型,计算锚链系统的非线性回复力,主要考虑锚链的水中质量、弹性拉伸长度以及与海底的摩擦阻力,同时忽略每根锚链的弯曲刚度、锚链系统的惯性和阻尼。
图3为悬链线模型中计算单根锚链的局部坐标系。在时域计算中,对任意给定时间,由平台位移和导缆孔位置,确定局部坐标系中相对于锚点的水平位移X(F)和垂直位移Z(F),根据悬链线方程计算导缆孔处的锚链力。

图2 叶素的气动载荷示意Fig. 2 Sketch of aerodynamic loads on a blade element

图3 锚链局部坐标系示意Fig. 3 Coordinate system for a catenary mooring line
3 环境条件
浮式风机在正常作业情况,会受到风、浪、流、冰等环境载荷的作用,其中风和波浪载荷为主要载荷。使用FAST软件进行数值分析,选取了三种典型工况,分析10 MW级海上浮式风机的运动响应特性。
系统在额定风速11.4 m/s下受气动力最大,系统会产生明显的运动响应。选取定常风,风速值为11.4 m/s,风向沿x轴正方向。波浪谱选取JONSWAP谱,浪向与风向一致。表2给出三种工况的定义。

表2 工况定义Tab. 2 Definition of cases
4 风浪联合作用下的运动响应
图4给出风机系统在风浪联合工况下(工况3)的发电机功率时历曲线,可以发现风机达到额定功率10 MW,但电功率变化幅度较大。这是由于浮式风机在风浪作用下大幅度运动,导致电功率波动,影响风机的输电质量。因此下文对风机系统的运动响应做详细分析。
因选取的环境载荷同向(沿x正方向),本节只研究系统的纵荡、垂荡、纵摇和首摇运动。FAST的数值模拟在时域方程下进行,模拟总时长为1小时。图5是系统在单独风工况下的纵荡时历曲线。模拟一开始,浮体受到风的作用表现出较大位移波动的瞬态效应,因此截取2 000 s到3 000 s的时间段分析,此时浮体运动稳定。表3是系统四个自由度运动稳定后的时历统计值。

图4 风浪联合作用下的电功率曲线Fig. 4 Time series of power in wind and wave

图5 单独风工况的纵荡运动时历曲线Fig. 5 Time series of surge in wind
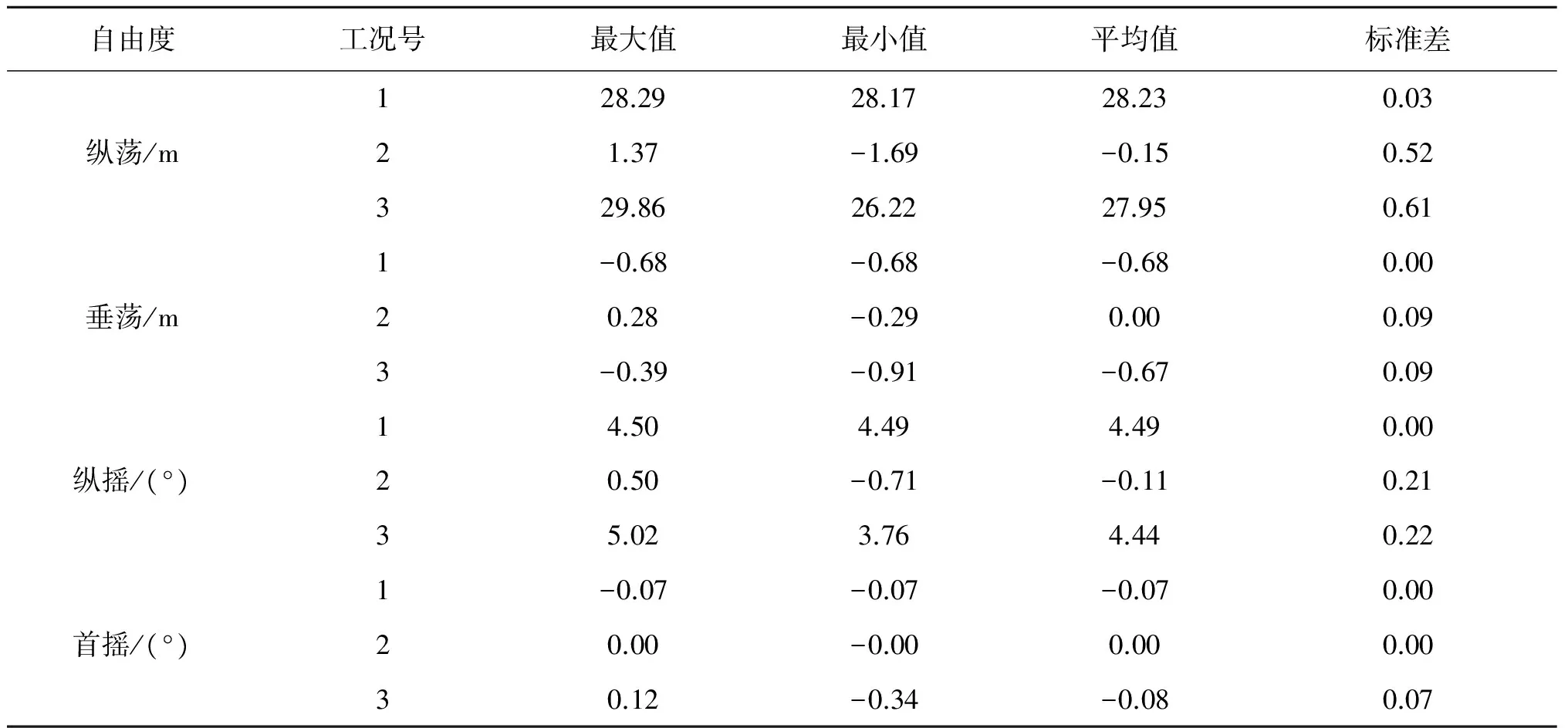
自由度工况号最大值最小值平均值标准差纵荡/m128.2928.1728.230.0321.37-1.69-0.150.52329.8626.2227.950.61垂荡/m1-0.68-0.68-0.680.0020.28-0.290.000.093-0.39-0.91-0.670.09纵摇/(°)14.504.494.490.0020.50-0.71-0.110.2135.023.764.440.22首摇/(°)1-0.07-0.07-0.070.0020.00-0.000.000.0030.12-0.34-0.080.07
4.1纵荡运动
比较表3中系统在三种工况下的纵荡运动时历统计值:单独风作用时,系统运动稳定后平衡在沿纵荡方向距离初始位置28.23 m;单独波浪作用时,系统在初始位置沿纵荡方向振荡;系统受风浪联合作用时,纵荡到平衡位置振荡。因此,风决定系统纵荡运动的平均值,波浪决定纵荡运动的幅值。
图6是去除瞬态效应后,系统纵荡运动的时历曲线和功率谱。单独波浪作用时,纵荡运动功率谱图中只有一个峰值,其圆频率为0.59 rad/s,接近波浪谱峰频率;风浪联合作用时,纵荡运动功率谱图中除了波频处的峰值,还有两处低频的峰值,波频的纵荡功率谱峰值明显小于低频的纵荡功率谱峰值。因此,风激励低频纵荡运动,波浪激励波频纵荡运动,纵荡运动以低频运动为主。

图6 纵荡运动时历曲线和功率谱Fig. 6 Time series and PSD of surge
4.2垂荡运动
表3中系统垂荡运动在三种工况下的时历统计值特点和纵荡运动类似,因此风决定系统垂荡运动的平均值,波浪决定垂荡运动的幅值。

图7 垂荡运动时历曲线和功率谱Fig. 7 Time series and PSD of heave
图7是去除瞬态效应后,系统垂荡运动的时历曲线和功率谱。系统在单独波浪工况下,垂荡运动的功率谱图中只有一处波频谱峰,和纵荡运动类似;受风浪联合作用时,系统垂荡运动的功率谱图中,有两处低频谱峰和一处波频谱峰,波频谱峰值比低频谱峰值大,同时波频谱峰对应的频率范围比低频谱峰对应的频率范围大。因此,风激励低频垂荡运动,波浪激励波频垂荡运动,垂荡运动以波频运动为主。
比较图7中两种工况下垂荡功率谱的波频部分:风浪联合作用时的波频垂荡功率谱谱峰低于单独波浪作用时的波频垂荡功率谱谱峰。这两种工况中,波浪条件相同,因此,风作用在风轮上产生的气动阻尼削弱了波频的垂荡运动。
4.3纵摇运动
表3中系统纵摇运动在三种工况下的时历统计值特点和纵荡、垂荡运动类似,因此风决定系统纵摇运动的平均值,波浪决定纵摇运动的幅值。
图8是去除瞬态效应后,系统纵摇运动的时历曲线和功率谱。与图6垂荡运动的功率谱类似:单独波浪作用时,系统的纵摇运动功率谱图中只有一处波频谱峰;风浪联合作用时,系统纵摇运动功率谱图中有两处低频谱峰和一处波频谱峰。唯一不同的是,风浪联合作用时,波频的纵摇功率谱峰值比低频的纵摇功率谱峰值小。因此,风激励低频纵摇运动,波浪激励波频纵摇运动,纵摇运动以低频运动为主。
图8中系统在两种工况下纵摇运动功率谱的波频部分和垂荡运动类似:风浪联合作用时波频纵摇功率谱谱峰值小于单独波浪作用时波频纵摇功率谱谱峰值,因此,风作用在风轮上产生的气动阻尼削弱了波频的纵摇运动。

图8 纵摇运动时历曲线和功率谱Fig. 8 Time series and PSD of pitch
4.4首摇运动
比较表3中系统在三种工况下的首摇运动时历统计值:单独风作用时,系统运动稳定后平衡在沿首摇方向距离初始位置0.07°;单独波浪作用时,系统基本没有首摇运动,和一般对称海洋结构物类似;系统受风浪联合作用时,首摇到平衡位置摇荡。因此,风决定系统首摇运动的平均值,风和波浪共同决定首摇运动的幅值。
图9是去除瞬态效应后,系统首摇运动的时历曲线和功率谱。单独波浪作用时,首摇运动功率谱在全频率范围均为0,与时历曲线和时历统计值得到的结果一致;风浪联合作用时,首摇运动的功率谱上出现两处峰值,具体的激励机制会在4.6的陀螺效应中分析。

图9 首摇运动时历曲线和功率谱Fig. 9 Time series and PSD of yaw
4.5运动耦合
在4.1节中的纵荡运动和4.3节中的纵摇运动中,已经给出这两个运动的功率谱,而且两张图中的三处谱峰对应的圆频率都是0.041 9 rad/s、0.125 7 rad/s和0.59 rad/s。根据自由衰减计算,系统纵荡运动和纵摇运动的固有频率分别为0.041 9 rad/s和0.125 7 rad/s。因此,系统的纵荡和纵摇运动都是纵荡固有频率下的运动、纵摇固有频率下的运动和波频运动的合成,系统的纵荡运动和纵摇运动有明显的耦合关系。
在前文4.2的垂荡运动中,已经给出垂荡功率谱,图中的三处谱峰对应的圆频率分别为0.041 9 rad/s、0.167 6 rad/s和0.59 rad/s。根据自由衰减计算,系统纵荡运动和垂荡运动的固有频率分别是0.041 9 rad/s和0.167 6 rad/s。所以,系统的垂荡运动是纵荡固有频率下的运动、垂荡固有频率下的运动和波频运动的合成。因为本文风机的风轮转动轴与水平面之间存在5°的夹角,风轮受到的低频气动力在竖直方向有一个向下分力,激励了纵荡固有频率下的垂荡运动。因此,系统的垂荡运动与其他自由度的运动并无耦合关系。
4.6陀螺效应
如前文4.4系统的首摇运动中所述,浮式风机在风浪联合作用下有不可忽略的首摇响应。在图9的风浪组合工况首摇运动功率谱中,有两处谱峰,对应圆频率分别为0.125 7 rad/s和0.544 5 rad/s。根据自由衰减计算,系统纵摇运动和首摇运动的固有频率分别为0.125 7 rad/s和0.544 5 rad/s。因此,系统的首摇运动是纵摇固有频率下的运动和首摇固有频率下运动的合成。风机启动后,定速转动的风轮会产生角动量,方向与风轮转动轴平行;因为平台的摇荡运动,转动轴方向发生变化,相对大地坐标系的角动量方向随之发生改变,角动量(矢量)对时间的变化率即是陀螺惯性力矩,考虑到角动量的方向,平台纵摇引起的陀螺惯性力矩使系统产生明显的首摇运动。
5 10 MW浮式风机和5 MW浮式风机的运动响应对比
文献[16]以NREL 5 MW 基准风机为研究对象,OC3-Hywind为浮式支撑结构,对5 MW级浮式风机系统的运动响应做了详细分析。表4给出文献[16]中5 MW浮式风机在同样环境条件下的运动时历统计值。
比较表4和表3的两个浮式风机运动时历统计值可以发现:在相同的风浪条件下,10 MW浮式风机沿纵荡方向的平均位移为27.95 m,比5 MW浮式风机的平均纵荡大了22.6%,必须依靠锚链张力克服;10 MW浮式风机的垂荡和纵摇运动较5 MW的略有减小,表明浮力产生的恢复力矩足够此风机系统在垂荡和纵摇方向的平衡。

图10 5 MW浮式风机和10 MW浮式风机的纵摇运动功率谱对比Fig.10 PSD of pitch of 5 MW and 10 MW floating wind turbine
图10是文献[16]中5 MW浮式风机和本文的10 MW浮式风机在风浪联合作用下的纵摇运动功率谱对比图。两种浮式风机的低频纵摇运动的功率谱值基本相同,但10 MW浮式风机的波频纵摇运动的功率谱值明显小于5 MW的;而且从低频和波频纵摇运动能量的相对比例可以看出,5 MW浮式风机的纵摇运动以波浪激励为主,但10 MW浮式风机的纵摇运动以风激励为主。因此推测,随着浮式风机单机容量的增大,风激励的低频运动比例增大,而波浪激励的波频运动比例减小。

表4 5 MW浮式风机运动的时历统计值Tab. 4 Time series of 3 DOFs of a 5 MW floating wind turbine
6 结 语
使用时域软件FAST对10 MW海上浮式风机在多种环境工况下的运动进行数值模拟,探讨了10 MW级海上浮式风机的运动特性。结论如下:
1)系统受风浪联合作用时,风载荷决定系统从初始位置运动到平衡位置的距离,波浪使得系统在此平衡位置无规则摇荡。
2)系统在风浪联合作用下的摇荡是低频运动和波频运动的合成,其中风激励低频摇荡运动,波浪激励波频摇荡运动。
3)风载荷作用在风轮上产生的气动阻尼削弱了波频的摇荡运动,其中垂荡和纵摇方向受气动阻尼影响较大。
4)系统的纵荡和纵摇运动有明显的耦合关系,垂荡运动和其他自由度的运动并无耦合关系。
5)浮式风机的纵摇运动改变了风轮处的转动角动量,产生首摇方向的陀螺惯性力矩,使系统产生首摇运动。
6)随着浮式风机单机容量的增加,风激励的低频运动比例增大,波浪激励的波频运动比例减小。
[1] 叶小嵘, 张亮, 吴海涛, 等. 平台运动对海上浮式风机的气动性能影响研究[J]. 华中科技大学学报, 2012, 40(3): 123-126. (YE Xiaorong, ZHANG Liang, WU Haitao, et al. Influence of platform motion response on aerodynamic performance of floating offshore wind turbine[J]. J. Huazhong Univ. of Sci. & Tech., 2012, 40(3): 123-126. (in Chinese))
[2] JONKMAN J, MARSHALL L, BUHL J R. FAST user’s guide[R]. NREL/EL-500-38230, Colorado: NREL, 2005.
[3] JONKMAN J, BUHL M. Load analysis of a floating wind turbine using fully coupled simulation[R]. NREL/CP-500-41714, Colorado: NREL, 2007.
[4] NIELSEN F G, HANSON T D, SKAARE B. Integrated dynamic analysis of floating offshore wind turbines[J]. American Society of Mechanical Engineers, 2007, 34(34):671-679.
[5] MA Yu, HU Zhiqiang, XIAO Longfei. Wind-wave induced dynamic response analysis for motions and mooring loads for a Spar-type offshore floating wind turbine[J]. Journal of Hydrodynamics, 2015, 26(6): 865-874.
[6] LI Liang, HU Zhiqiang, WANG Jin, et al. The development and validation of an aero-hydro simulation code for offshore floating wind turbine[J]. Journal of Ocean and Wind Engineering, 2015, 2(1): 1-11.
[7] BAK C, BITSCHE R, YDE A, et al. Light rotor: the 10 MW reference wind turbine[EB/OL]. http://proceedings.ewea.org/annual 2012/allfiles2/1004_EWEA2012presentation.pdf.
[8] AINA Crozier. Design and dynamic modeling of the support structure for a 10 MW offshore wind turbine[D]. 2011.
[9] KASPER Sandal. Improved design of the support structure for the NOWITECH 10 MW reference turbine[D]. Trondheim: NTNU, 2014.
[10] 肖京平, 陈坤, 刘刚. 10 MW风电机组空气动力初探[J]. 空气动力学学报, 2011, 29(5): 674-680. (XIAO Jingping, CHEN Kun, LIU Gang. Preliminary study on aerodynamic design of 10 MW wind turbine[J]. Acta Aerodynamic Sinica, 2011, 29(5): 674-680. (in Chinese))
[11] BAK C, ZAHLE F, BITSCHE B, et al. Description of the DTU 10 MW reference wind turbine[R].DTU Wind Energy Report-I-0092, Denmark: DTU Wind Energy, 2013.
[12] JONKMAN J. Definition of the floating system for phase IV of OC3[R]. NREL/TP-500-47535, Colorado: NREL, 2010.
[13] HANSEN M O L. Aerodynamics of wind turbines[J]. Rotors Loads & Structure James, 2008, 5(2-3): 141-167.
[14] LEE C. WAMIT theory manual[ED/OL]. http://www.wamit.com, 2013.
[15] JONKMAN J. Dynamics modeling and loads analysis of an offshore floating wind turbine[D]. Colorado: University of Colorado, 2007.
[16] 马钰. 单柱式浮式风机动力性能机理研究[D]. 上海: 上海交通大学, 2014. (MA Yu. Research on dynamic analysis for a spar type offshore floating wind turbine[D]. Shanghai: Shanghai Jiao Tong University, 2014. (in Chinese))
Kinetic characteristics research of the 10 MW-level offshore floating wind turbine
XU Yingyu1, 2, HU Zhiqiang1,2, LIU Geliang1, 2
(1. State Key Laboratory of Ocean Engineering, Shanghai Jiao Tong University, Shanghai 200240, China; 2. Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration, Shanghai Jiao Tong University, Shanghai 200240, China)
P752;TK89
A
10.16483/j.issn.1005-9865.2017.03.006
1005-9865(2017)03-0044-08
2016-04-14
国家自然基金重点项目(51239007)
徐应瑜(1992-),女,江苏南通人,硕士研究生,主要研究方向为海洋工程结构物水动力性能。 E-mail: Ann_Xyy1992@sjtu.edu.cn