基于PLC的机械吊臂定位控制设计
2017-09-29姚世选李论仲崇权
姚世选,李论,仲崇权
(1.大连交通大学 动车应用与维护工程学院,辽宁 大连 116028; 2.大连理工大学 控制科学与工程学院,辽宁 大连 116024)*
基于PLC的机械吊臂定位控制设计
姚世选1,李论1,仲崇权2
(1.大连交通大学 动车应用与维护工程学院,辽宁 大连 116028; 2.大连理工大学 控制科学与工程学院,辽宁 大连 116024)*
针对大型零部件清洗系统中的自动机械吊臂进行控制研究,基于PLC控制平台由控制单元、执行机构以及显示平台组成.介绍了控制系统的工作原理,建立了机械吊臂的数学模型,对定位过程中的运动路径进行了计算分析.PLC主要控制机械吊臂的运动,以工控机屏幕显示大型零件清洗状态信息和操作控制,文中给出了系统硬件电路和软件设计.该系统的机械吊臂定位精度优于1 mm,能够实现机械吊臂悬挂车钩高速准确无误自动装入清洗室插销中,实现自动化操作.
运动控制;定位模块;PLC
0 引言
在工业、国防、建筑等领域中,时常会用到大型的机械吊臂进行物体的转载,例如在搭建桥梁的过程中对桥体进行对接,在汽车工业中需要对车体进行吊装等.在通常情况下,常常采用人工手动的方式进行控制,但是随着近年来技术的发展,在对待加工件转移的时间和精度控制等方面,这种方式已经不再符合现阶段的生产过程,所以基于PLC控制平台搭建的定位模块很好的满足了工业活动自动化的要求,而且解决了控制模型建立以及精度计算的难度.
本文以机械吊臂为核心的清洗系统,解决了由于长时间在线路上作业的大型零部件覆盖黏着的杂物进行清洗效率较低,作业环境较差等问题.
1 参数计算
控制电机的方式选择位置控制模式,在防止电机运行过程中的失步、超步和过冲等现象,电机的响应频率必须要大于等于所控的脉冲频率[2- 3]并采用双梯型曲线模式.由于机械吊臂需要定位的位置有3个,所以要求精确计算机械吊臂每走一个工步PLC定位模块发送的脉冲数量、最高速度下发送的脉冲频率已及加速度的计算:
(1)脉冲数量计算

(2)脉冲频率计算
(3)脉冲加速度计算

选用PLC内部集成运动控制定位模块,该定位模块速度是梯形曲线,为了使运动过程更加稳定采用的是加速减速同样的斜率,实现与 PLC定位模块的性能更加匹配,可以绘制出速度双梯形曲线如图1所示,第二段曲线是降低车钩入槽速度,使定位更加精确[4- 5].
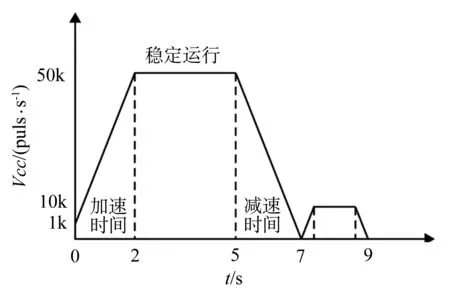
图1 速度双T型曲线
2 设计方案
选用MAC1610运动控制系列PLC为系统主控制器,CPS100为电源模块,EIO100和EIO160分别是数字量输入、输出模块,和EA100、EA150组成的模拟量输入、输出模块.机械部分由机械吊臂机构、待清洗件支架、清洗室和控制台组成.设计方案框图为图2所示.
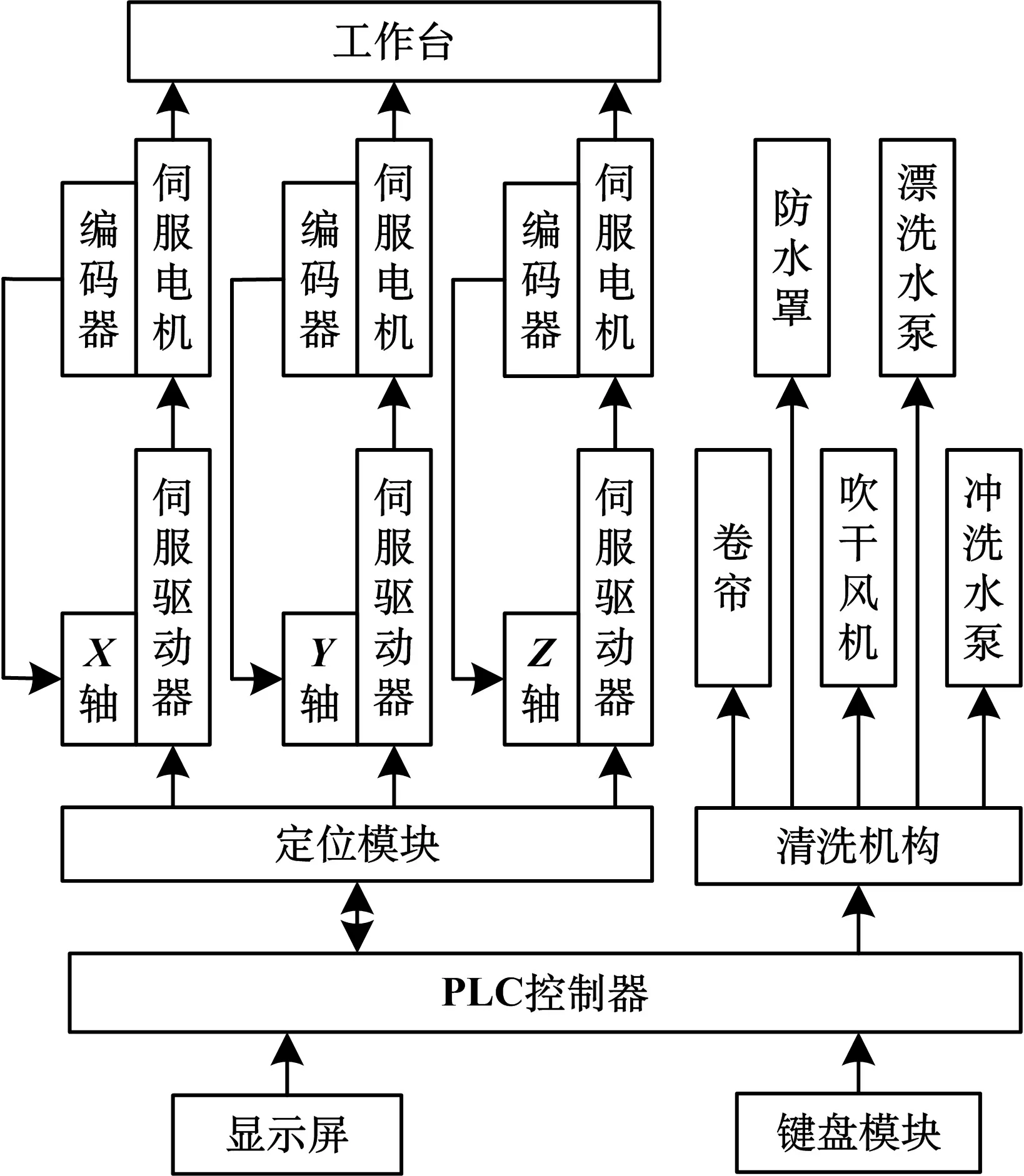
图2 设计方案图
3 定位模型
创建原点位置、清洗位置和取件位置三点定位的示意图,如图3所示.
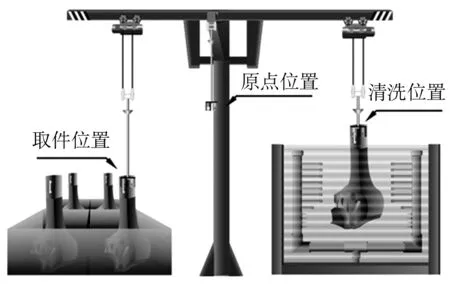
图3 定位示意图
由图所示,取件位置和清洗位置分别位于原点位置两侧,依据机械臂三轴均可自由移动,建立以原点位置(即吊钩所在位置)为模型原点的三维坐标系模型,如图4所示.

图4 定位与计算模型
原点位置为O点,取件位置和清洗位置分别为Q和P点,对应Ⅷ和Ⅵ象限.在从O点定位到Q点过程中,可测量是OQ和Q点到O点视角α,和X轴方向Q点坐标(明确定位量a1).假设QQ0为OQ在XY坐标轴下的投影,c1则为QQ0在Z轴方向的投影;m为伺服驱动器的指令脉冲倍频,p为电机每转脉冲数,s为坐标间距,L为丝杠螺距,则可以精确定位到Q点的位置:
从Q点定位到P点在Z轴不变的基础上建立XY轴坐标系模型,如图5所示.
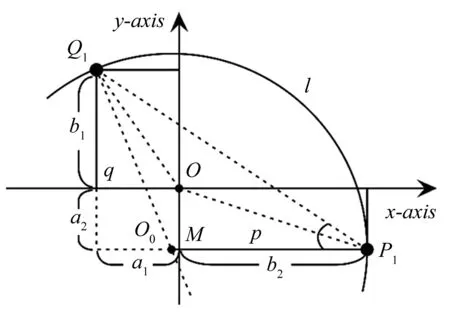
图5 两点定位模型
在定位至P点的过程中,要想计算Y轴电机转动的脉冲数,必须知道从Q1点运动到P1的弧长l,OQ1和OP1分别为OQ和OP在XY坐标面上的投影,选择最优定位路线,即做P1至Y轴的垂直线p相交于M,连接Q1和P1,以Q1P1为一条边,另一条边为q使两边的夹角等于∠Q1P1O0,q和p相交的点O0即为运动路径的圆心,满足∠O0Q1P1=∠Q1P1O0,并且已知Q和P点的XY轴坐标,可以计算出Q1P1的长度为:
因为∠Q1P1O0已知,可以求得运动路径所在圆的半径为:
进而可以得到:
同理可以求得从P点回到原点的定位路径.在选择最优转动路径的时候,由于清洗室的上端安装有插槽,所以需要考虑到吊销进入插槽中的定位轨迹,图6为三种不同的入槽角度.

图6 旋转角度模型
通过实验证明,在选择A1A2轨迹进行入槽定位比B1B2和C1C2轨迹要稳定、准确,因为插槽的凹口是平直面,在B1B2和C1C2轨迹中,入槽的角度要小于垂直于凹口入槽的角度,如图7所示.

图7 A1A2轨迹图
这样可以求取三点的定位坐标和最优轨迹路线,将计算出来的脉冲数写入PLC定位模块中进行自行寻迹.
4 主程序设计
清洗系统的流程图如图8所示.
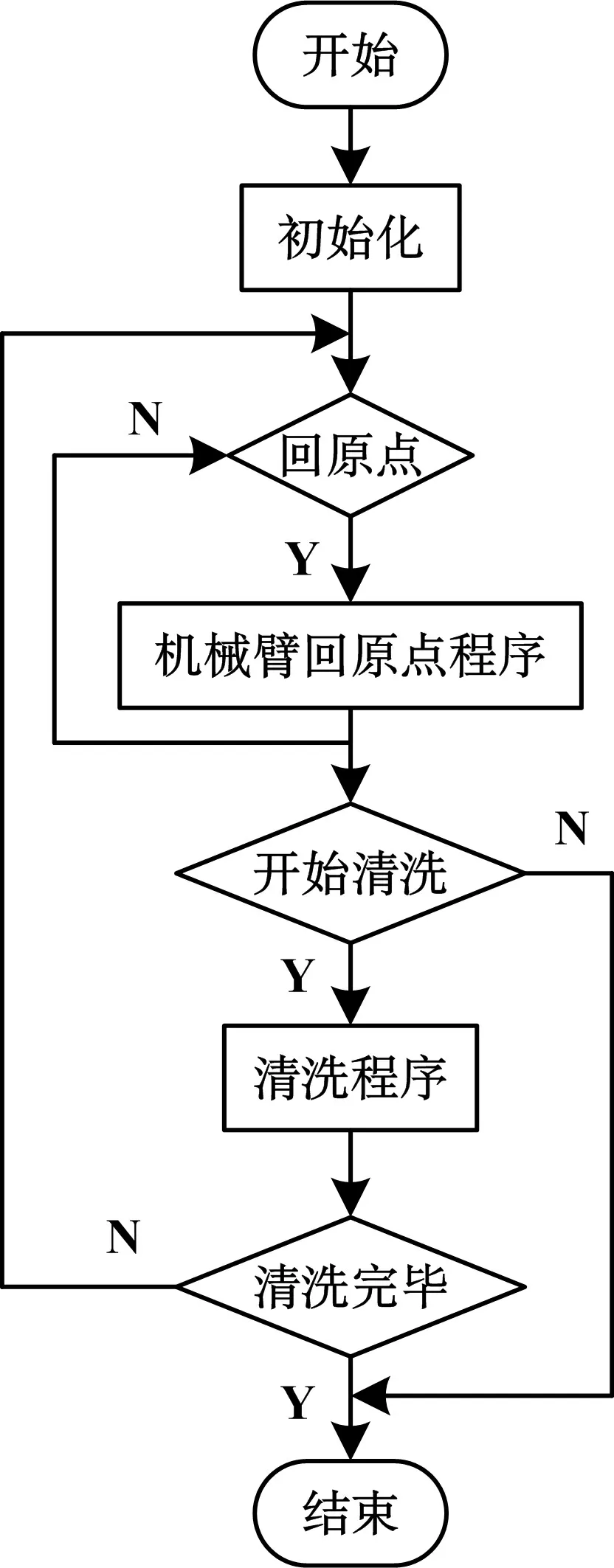
图8 主程序流程图
在主程序中,为了实现三轴定位精确,使用了大工计控PLC的运动控制中相对定位指令MC_MoveRelative和MC_Stop指令.其中四个主要参数是Distance、Velocity、Acceleration和Deceleration[6- 7].为了让机械臂定位逻辑正确,添加了VW200和VW201两个标志位(图9),根据数组关系确定对应的定位信息.
前项分别由0至4组成,0代表待命状态,“1”表示图4中从O点定位到Q点过程,“2”表示Q点到P点过程,“3”表示进入清洗室,“4”表示从P点回到O点过程.后项代表机械臂XYZ三轴的运动状态,应用Move_W指令,在运动到指定地点后标志位置1,将数组中对应的数值移至主程序中,T9是该轴所需的延时,延时过后主程序会自行判断该行使哪一个轴的运动以及运动的参数.

图9 VW200、VW201数组
上位机采用Dview组态软件进行上位机界面的设计.与PLC进行数据交换的方式是通过以太网线连接[8],上位机自动模式界面图如图10所示.

图10 上位机自动模式界面
操作者选择需要清洗的待加工件号便可以自动清洗,与实际机械臂的运动情况一一对应.
5 结论
该清洗系统清洗的速度可以实现3 min清洗一次,定位精度优于1 mm,实现机械吊臂悬挂待加工件高速准确无误自动装入清洗室插销中,降低工人的劳动强度,满足清洗时的安全和高效.
[1]杨浩.运输组织学[M].北京:中国铁道出版社,2004.
[2]齐占庆,王振臣.电气控制技术[M].北京:机械工业出版社,2002.
[3]李道霖.电气控制与PLC原理及应用[M].北京:电子工业出版社,2004.
[4]秦忆.现代交流伺服系统[M].武汉:华中理工大学出版社,1995.
[5]龙永辉,孙中生.MAC运动控制器手册[J].工业控制计算机,2005(7):11- 12.
[6]吴晓君,杨向明.电气控制与可编程控制器应用[M].北京:中国建材工业出版社,2004.
[7]G L BATTEN.Programmabe Controllers: hardware software and Application[M].New York:MC Graw-Hill,1994.
[8]李鸿儒.基于Modbus协议的PLC远程控制[J].电子测试,2015(7):125- 126,8.
Positioning Control Design of Manipulator based on PLC
YAO Shixuan1,LI Lun1,ZHONG Chongquan2
(1.School of EMU Application & Maintenance Engineering,Dalian Jiaotong University,Dalian 116028,China; 2.Insitute of Control Science and Engineering,Dalian University of Technology,Dalian 116024,China)
According to the control of automatic lifting arm in the cleaning system of large parts, the PLC control platform is composed of a control unit, an actuator and a display platform. The working principle of the control system is introduced, the mathematical model of the manipulator is established, and the motion path of the control system is calculated and analyzed. PLC mainly control the movement of the manipulator, the control computer screen display large parts cleaning status information and operation control, the paper gives the system hardware circuit and software design. The system of mechanical lifting arm positioning accuracy is within 1 mm, and it can realize mechanical boom suspension coupler high-speed accurate load automatically cleaning room bolt and realize automatic operation.
motion control;orientation module;PLC
1673- 9590(2017)05- 0061- 04
A
2016- 07- 18
国家科技支撑计划资助项目(2015BAF20B02)
姚世选(1976-),男,副教授,博士,主要从事计算机应用技术、智能传感与机器人的研究 E-mail:ysx@djtu.edu.cn.
