十五相异步电机建模及稳态仿真研究
2017-09-22朱军阮江军陈嘉福
朱军,阮江军,陈嘉福
(1.武汉大学 电气工程学院,湖北 武汉 430072;2.武汉船用电力推进装置研究所,湖北 武汉 430064)
十五相异步电机建模及稳态仿真研究
朱军1,2,阮江军1,陈嘉福2
(1.武汉大学 电气工程学院,湖北 武汉 430072;2.武汉船用电力推进装置研究所,湖北 武汉 430064)
为研究变频供电多相异步电机的稳态性能,依据电机多回路理论,采用广义坐标变换矩阵,建立了正交坐标系下十五相(3组五相移12°)异步电机的数学模型。在分析归纳以三相和五相为单元的2类典型多相电机状态变量对称性的基础上,给出了十五相异步电机的稳态仿真算法。对方波变频供电五相和十五相(3组五相移12°)两台异步电机的定子电流、转子电流和电磁转矩进行了仿真计算和分析比较。仿真计算结果表明,方波供电时十五相电机稳态定子电流谐波含量高于五相电机,稳态转矩脉动和转子侧电流谐波含量低于五相电机。
多相电机;广义坐标变换;电压型逆变器;对称;仿真
0 引 言
随着交流调速技术的发展,多相电机[1-2]因具有空间磁势谐波含量少,转矩脉动小,可采用集中整距绕组和非正弦供电提高电机转矩密度、效率和材料利用率,冗余度高且缺相后能够容错运行及可用低压器件实现大功率等优点而被广泛应用于一些需要高密度、大功率、高可靠性的场合,如船舶电力推进、电动汽车、全电飞机及国防领域等[3-5]。
为分析相数、绕组型式等结构参数对多相电机性能影响,研究多相电机控制策略,提高多相电机运行性能,需要建立相对准确的多相电机数学模型。在多相电机的建模方面,国内外学者做了大量的研究工作。文献[6]建立了多相集中整矩绕组异步电机数学模型;文献[7]对十二相(4Y移15°)同步电机进行了建模与仿真;文献[8]提出一种基于多回路理论的多相整距绕组异步电机建模与参数计算方法,并进行了十五相电机仿真;文献[9]建立了一种双六相储能电机dq0坐标系数学模型和仿真模型;文献[10]建立了一种基于广义dq坐标系的多相异步电机通用数学模型;文献[11]和[12]分别建立了双九相同步电机和双Y移30°六相永磁同步电机的数学模型。上述数学模型为多相电机的仿真分析提供了很好的理论支撑,但都是针对多相电机的动态性能进行仿真,即为了获得电机稳态仿真结果,一般是通过电机动态运行一定时间进入稳态后,获得多相电机稳态性能,导致仿真所需时间较长;而现有文献对多相电机稳态性能仿真研究的报道较少。随着多相电机应用的不断推广,为减少稳态仿真时间,亟需研究一种快速的多相电机稳态性能仿真算法。
为此,本文从建立十五相(3组五相移12°)异步电机的数学模型入手,对以三相和五相为单元的2类典型多相电机状态变量的对称性进行了分析归纳,给出了相应的稳态仿真算法。利用此算法,可有效缩短仿真求解周期,从而大幅降低多相电机稳态仿真时间。在此基础上,利用多相电机状态变量的对称性,采用状态矩阵计算方法,对电压型逆变器供电的五相和十五相电机进行了稳态性能仿真与对比分析研究。仿真结果对于此类电机稳态性能的分析和设计有一定的参考作用。
1 十五相异步电机的建模
本文研究的十五相异步电机的定子绕组由3组移12°电角度的五相绕组组成;五相绕组空间对称分布,每相相差72°电角度,集中整距布置。十五相异步电机定子绕组轴线相对位置如图1所示。

图1 定子绕组轴线位置图Fig.1 Arrangement of stator windings
1)基本假设和正方向选择。
在研究十五相(3组五相移12°)异步电机的数学模型时,做如下假定[13]:
忽略铁磁材料饱和、磁滞等影响,不考虑集肤效应;不考虑齿槽效应;气隙磁场只考虑基波和三次谐波,忽略磁场高次谐波的作用;不考虑频率和温度变化对绕组电阻的影响。
电压、电流正方向选择按电动机惯例,转速正方向为逆时针方向。
2)同步速坐标系下的数学模型。
十五相(3组五相移12°)广义坐标变换矩阵为
T=diag(Ts1,Ts2,Ts3,Tr1,Tr2,Tr3)。
(1)
式中:Tsi、Tri(i=1,2,3)具体表达式见下式所示;θs为以定子A1相绕组轴线为参考轴的同步坐标系位置电角度;θr为以定子A1相轴线为参考轴的转子位置电角度。
(i=1,2,3);(2)
(i=1,2,3)(3)
状态方程为
pI=AI+BU。
(4)


式中:下标z1,z3表示3次谐波平面对应分量;E15为15阶单位阵;0m×n为m×n阶零矩阵;rs为定子相电阻,rr为转子相电阻;ω1为参考坐标系角速度,ωr为转子角速度。
转矩方程为
(5)
式中:p为电机极对数;lmsr为定转子互感;k为定、转子相绕组中三次谐波绕组所占的比例。
2 多相电机稳态仿真算法
谐波分析法和状态变量分析法是进行非正弦供电的交流电机稳态性能分析的2种常用方法。谐波分析法由于需要对大量谐波进行叠加,计算量较大;而状态变量分析法是在时域内直接进行分析和求解,比较适合于逆变器供电的交流电机调速系统稳态仿真计算。
采用状态变量分析法计算时,以状态方程(4)为例多相电机的状态方程解为
X(t)=eAtX(0)+[A-1(eAt-E)]BU0。
(6)
式中,X(0)=(S-eAt)-1[A-1(eAt-E)]BU0表示状态变量的初值,U0为电压矢量的初值,S为状态变量在求解区间上的对称矩阵。
采用状态变量分析法进行稳态性能计算,难点在于决定状态变量的初始条件。通常做法是设定初始值进行迭代校正;但由于迭代运算有是否收敛和收敛快慢问题,会造成计算速度慢、计算量大等缺点。为此文献[14]提出了1种直接求解三相电机状态变量初始条件的快捷算法,即利用三相对称系统变量所特有的单相、三相对称性来直接求取初始条件。这不仅可以迅速求得一个完整周期内闭式解,而且还可将求解区间缩短为1/6周期,大大减小计算量。对于更多相对称系统,本文通过对称性分析研究,求解周期还可缩短。下面在三相和五相电机状态变量的对称性关系的基础上,给出以三相和五相为单元的多相电机状态变量的对称性关系。
1)三相电机状态变量对称性。
I3_abcs(ωt+π/3)=S3_abcI3_abcs(ωt)。
(7)
2)m相(n组Y移60°/n)电机状态变量对称性。
Im_abcs(ωt+π/m)=Sm_abcIm_abcs(ωt)。
(8)
3)五相电机状态变量对称性。
I5_abcs(ωt+π/5)=S5_abcI5_abcs(ωt)。
(9)
I5_abcs(ωt)=[ia(ωt)ib(ωt)ic(ωt)id(ωt)ie(ωt)]T。
4)k相(q组五相移36/q度)电机状态变量对称性。
Ik_abcs(ωt+π/k)=Sk_abcIk_abcs(ωt)。
(10)

3 仿真实例
根据前面建立的模型和仿真算法,利用商业仿真软件,本文对设计的2台十脉波电压型逆变器供电异步电机包括1台为五相,1台为十五相(3组五相移12°)异步电机的稳态性能进行了仿真。2台多相电机主要设计参数见表1。仿真结果如图2~图4所示。为便于比较,图中纵坐标参数均以标幺值表示。

表1 两台多相电机的设计参数Table 1 Parameters of two multiphase motor
由图2可见,十脉波逆变器供电时,五相电机定子相电流主要谐波为9次、11次,其谐波含量分别约为3.8%和2.5%;十五相(3组五相移12°)电机定子相电流主要谐波为9次、11次、19次和21次,其谐波含量分别约为10.2%、6.9%、2.4%和2%。五相电机定子相电流各主要谐波含量均小于十五相电机。
由图3可见,十脉波逆变器供电时,五相电机转子相电流主要谐波为9次和11次、19次和21次、29次和31次,其谐波含量分别约为10.2%(9次和11次)、5.1%(19次和21次)和3.4%(29次和31次);十五相(3组五相移12o)电机转子相电流主要谐波为9次和11次、19次和21次、29次和31次,其谐波含量分别约为4.1%(9次和11次)、3.5%(19次和21次)和2.9%(29次和31次)。五相电机转子电流主各要谐波含量明显高于十五相电机。
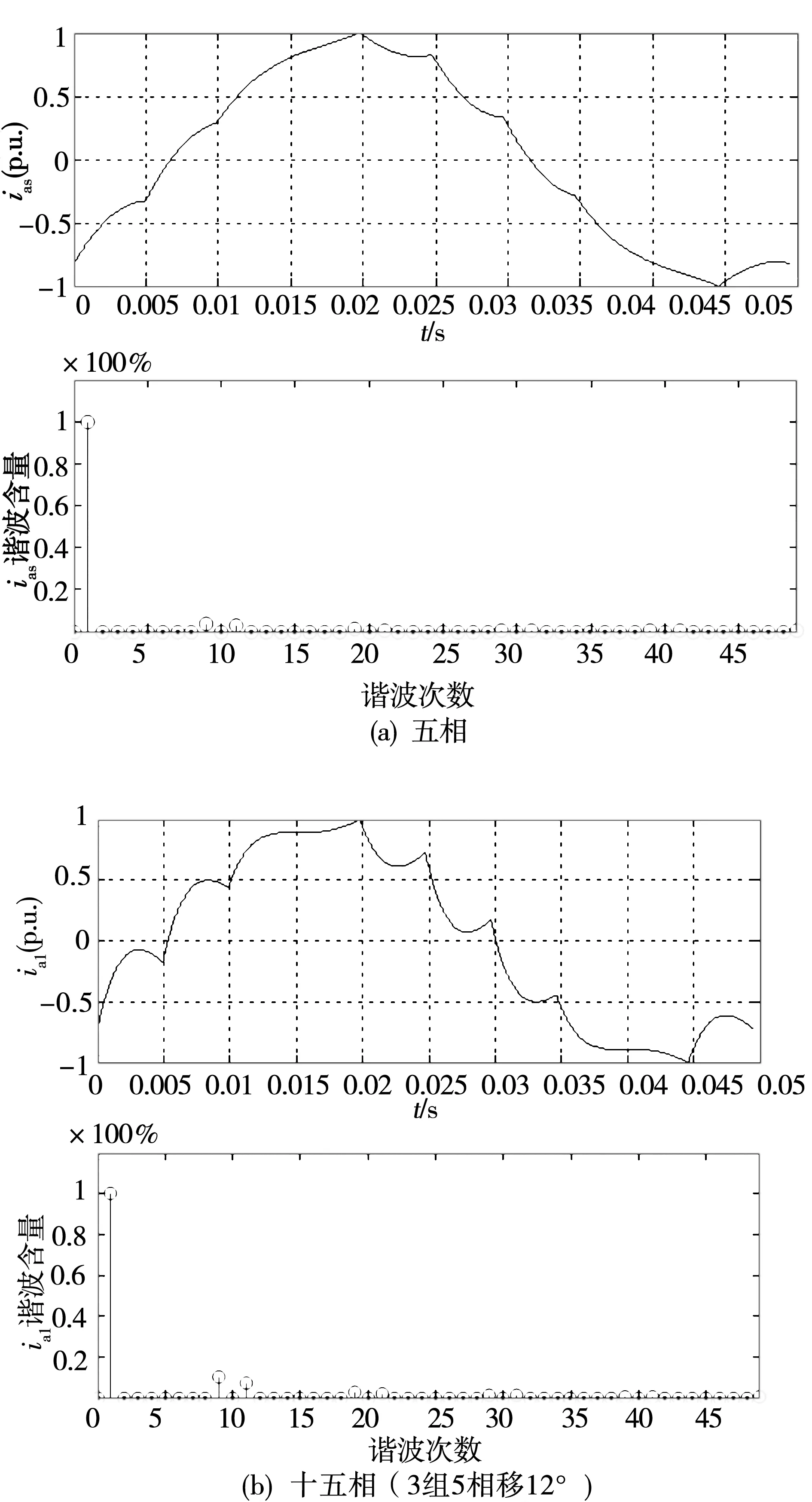
图2 十脉波供电下异步电机定子电流仿真波形Fig.2 Stator current simulation waveform of asynchronous motor powerd by square wave
由图4可见,十脉波逆变器供电时,五相电机的转矩脉动频率最低次数为10、脉动幅值约为2.7%,十五相(3组五相移12°)异步电机的转矩脉动频率最低次数为30、脉动幅值约为0.2%。五相电机转矩脉动最低频率次数和幅值远高于十五相电机。
通过傅里叶分解可知,十脉波逆变器供电时,五相和十五相(3组五相移12°)电机定子相电压中会包含10k±1(k=1,2,3,…)次谐波,相应地会在定子相电流中产生10k±1(k=1,2,3,…)次谐波,在图2所示的仿真结果中得到较好的验证。而十五相电机定子侧谐波电流相对五相电机增大,一方面是由于电机相数的增多,导致每相定子绕组的串联匝数减少,定子漏抗减小,逆变器供电时,定子谐波电流增加,进而定子损耗加大,发热加剧;另一方面,从机电能量转换的角度理解,多相电机定子侧还存在一组与机电能量转换无关的广义零序分量,它们与转子无耦合,逆变器供电时,增加定子侧的损耗。

图3 十脉波供电下异步电机转子电流仿真波形Fig.3 Rotor current simulation waveform of asynchronous motor powerd by square wave
由电机绕组理论可知,十五相(3组五相移12°)异步电机,从电机内部相量图看,可看成30相对称分布的电机,其定子相电流中u(u=1,9,11,…)次时间谐波产生的电枢绕组合成空间谐波为v=±(30k±u)(k=1,2,3,…,且前后正、负号同时取);相应的五相电机定子相电流中u(u=1,9,11,…)次时间谐波产生的电枢绕组合成空间谐波为v=±(10k±u)(k=1,2,3,…,且前后正、负号同时取)。因此,相对于五相电机,十五相(3组五相移12°)电机大大改善了空间合成磁势谐波,使得对电机性能影响较大的最低次空间磁势谐波次数增大、幅值下降,从而使得电机转矩脉动大幅度减小、转子侧谐波及损耗减小,图3和图4中所示仿真结果较好地验证了这一点。

图4 十脉波供电下异步电机电磁转矩仿真波形Fig.4 Electromagnetic torque simulation waveform of asynchronous motor powerd by square wave
4 结 论
本文建立了十五相(3组五相移12°)异步电机数学模型,分析归纳了以三相和五相为单元的2类典型多相电机状态变量的对称性。在此基础上,充分利用多相电机状态变量对称性缩短仿真时间,对2台电压型逆变器供电五相和十五相电机进行了稳态性能仿真与对比分析。由仿真结果可知,以五相为基本组成单元的多相电机用于变频调速时,稳态定子电流谐波含量高于五相电机,但稳态转矩脉动和转子侧电流谐波含量却低于五相电机。因此,需要在电机与系统设计中扬长避短、综合考虑。
[1] LEVI E,BOJOI R,PROFUMO F,et al.Multiphase induction motor drives-a technology status review[J].Electric Power Applications,2007,1(4):489.
[2] LEVI E.Multiphase electric machines for variable speed applications[J].IEEE Transactions on Industrial Electronics,2008,55(5):1893.
[3] SHUAI L,CORZINE K.Multilevel multi-phase propulsion Drives[C].IEEE Electric Ship Technologies Symposium,2005:363.
[4] 马伟明.电力电子在舰船电力系统中的典型应用[J].电工技术学报,2011,26(5):1.MA Weiming.Typical applications of power electronics in naval ship power systems[J].Transactions of China Electrotechnical Society,2011,26(5):1.
[5] 刘自程,郑泽东,彭凌,等.船舶电力推进中十五相感应电机同轴运行及容错控制策略[J].电工技术学报,2014,29(3):65.LIU Zicheng,ZHENG Zedong,PENG Ling,et al.Fixed joint double fifteen phase induction motor control and fault-tolerant control in ship propulsion system[J].Transactions of China Electrotechnical Society,2014,29(3):65.
[6] TOLIYAT H A,LIPO T A,WHITE J C.Analysis of a concentrated winding induction machine for adjustable speed drive applications.I.Motor analysis[J].IEEE Transactions on Energy Conversion,1991,6(4):679.
[7] 谢卫,朱军.十二相四Y移15°绕组同步电动机的数学模型及动态仿真[J].电工技术学报,2004,19(1):2.XIE Wei,ZHU Jun.Fixed modeling and simulation of 12-phase synchronous motor with four Y-connected 3-phasesynmetrical windings displaces in turn by 15[J].Transactions of China Electrotechnical Society,2004,19(1):2.
[8] 张经纬,祝侯权,黄振华.等.多相集中整距绕组感应电机的建模与仿真[J].电机与控制学报,2010,14(9):75. ZHANG Jingwei,ZHU Houquan,HUANG Zhenhua,et al.Modeling and simulation of a multiphase concentrated induction machine[J].Electric Machines and Control,2010,14(9):75.
[9] 欧阳斌,马伟明,王东,等.大容量双六相储能电机系统建模与仿真[J].电机与控制学报,2014,18(1):92.OUYANG Bin,MA Weiming,WANG Dong,et al.Modeling and simulation of energy storage system with dual six-phase electrical machine of great capacity[J].Electric Machines and Control,2014,18(1):92.
[10] 蔡卓剑,赵荣祥,汪槱生,等.一种多相异步电机的通用数学模型[J].中国电机工程学报,2015,35(15):3929.CAI Zhuojian,ZHAO Rongxiang,WANG Yousheng .A general model of multiphase induction machines[J].Transactions of China Electrotechnical Society,2015,35(15):3929.
[11] 欧阳斌,晏明,马伟明,等.移40双九相同步电机数学模型研究[J].中国电机工程学报,2015,35(1):206.OUYANG Bin,YAN Ming,MA Weiming.Study on the mathematical model of dual nine-phase synchronous machines by shifting 40°[J].Transactions of China Electrotechnical Society,2015,35(1):206.
[12] 郭新华,陈银,尚荣艳,等.不同绕组型式双丫移30六相永磁同步电机建模与谐波电流优化控制[J].电工技术学报,2016,31(2):56.GUOXinhua,CHEN Yin,SHANG Rongyan,et al.Modeling and optimized harmonic current control for six phase permanent magnet synchronous motor with two connected windings displaced by 30° in different winding types[J].Transactions of China Electrotechnical Society,2016,31(2):56.
[13] 辜承林.机电动力系统分析[M].武汉:华中理工大学出版社,1998:144-145.
[14] 贺益康.交流电机仿真[M].杭州:浙江大学出版社,1990:337-34.
(编辑:张 楠)
Modelingandsteady-statesimulationforfifteenphasesasynchronousmotor
ZHU Jun1,2,RUAN Jiang-jun1,CHEN Jia-fu2
(1.School of Electrical Engineering,Wuhan University,Wuhan 430072,China;2.Wuhan Institute of Marine Electric Propulsion,Wuhan 430064,China)
In order to research the steady state performance of multiphase asynchronous motor fed by variable frequency power supply,according to multi loop principles of electrical machine,the generalized coordinate transformation was adopted,and a mathematical model of fifteen phases(3 groups five phase moved 12 degrees) asynchronous motor in the orthogonal coordinate system was established.Based on analyzing and concluding the symmetry of state variables for two kinds of typical multi-phase electrical machine composed with three phases and five phases,the steady-state simulation algorithm for fifteen phases asynchronous motor was given.Simulation calculation and analysis comparison was made for the stator & rotor current and electromagnetic torque of a five phases and a fifteen phases (3 groups five phase moved 12 degrees) asynchronous motor fed by inverter,a comparison to a five phases and a fifteen phases asynchronous motor was made.The simulation results show that the steady-state stator harmonic current content of fifteen phases motor is higher than the five phases motor,while the steady-state rotor harmonic current content and the electromagnetic torque of fifteen phases motor is lower than the five phases motor powered by square wave.
multi-phases motor; generalized coordinate transformation; voltage source inverter; symmetry; simulation
10.15938/j.emc.2017.09.002
TM 343
:A
:1007-449X(2017)09-0008-07
2016-09-19
国防基础科研项目
朱 军(1975—),男,博士研究生,研究方向为船舶电力推进技术;阮江军(1968—),男,博士,博士生导师,研究方向为高电压技术、电机电磁场理论及控制;陈嘉福(1976—),男,高级工程师,研究方向为船舶电力推进技术。
朱 军
